一种基于单幅图像的相机标定方法
2021-10-05徐杰
徐 杰
(北京城市学院3D打印研究院,北京100083)
0 引 言
在现代机器视觉和工业测量中,人们通常用张正友方法[1]对摄像机的内外参数进行标定。其好处是,使用一块带有特征点的平面标定板即可(平面板容易生产),且标定精度高。但该方法需要拍摄至少3幅不同角度的标定板图像(通常要拍摄10幅左右的图像),才能完成标定,标定工作时间长、容易出错,给实际应用带来一定的麻烦。此外,当多个相机需要同时标定时,不容易找到对所有相机都合适的标定板角度和位置,容易漏拍、错拍,需要仔细调整角度位置,否则会产生算法错误,使标定成为一个繁琐的工作。
针对上述情况,本文提出一种标定方法(是作者对已发表论文[2]的改进),使用平面标定板,只拍一幅图像即可完成标定,操作简单方便,且标定精度高。
1 摄像机模型
摄像机的标定,就是要确定相机内、外参数。外参包括相机的空间位置和姿态,内参包括相机的焦距、畸变等。计算相机的空间位置和姿态,涉及到世界坐标系、摄像机坐标系和焦平面坐标系等,以及各坐标系之间的变换关系。
1.1 标定中的几种坐标系[3]
(1)世界坐标系(Owxwywzw)。 世界坐标系(Owxwywzw)是在环境中选择一个基准坐标系,描述摄像机和物体的位置。一般以标定板为基准建立世界坐标系。标定板中心为世界坐标系原点,标定板法向上方向为世界坐标系Z轴方向。
(2)摄像机坐标系(Ocxcyczc)。 原点在摄像机光心,zc轴为摄像机光轴,与摄像机焦平面垂直,xc、yc轴分别平行于焦平面坐标系的xu轴和yu轴,且方向相同,如图1所示。

图1 世界坐标系、摄像机坐标系和焦平面坐标系及其变换关系Fig.1 World Coordinate,Camera Coordinate,Focal plane Coordinate and relations
(3)焦平面坐标系(Ouxuyu)。 物体在摄像机焦平面上成像,该坐标系以实际物理长度为单位,原点为摄像机光轴与焦平面的交点,xu轴、yu轴分别平行于图像坐标系的u轴和v轴,且方向相同。
(4)图像坐标系(Ofuv)。CCD传感器阵列在焦平面上,将物像转换为像素图像,图像坐标系以像素为单位。图像的横向为u轴,纵向为v轴,如图2所示。

图2 焦平面上的图像坐标系(Of uv)与焦平面坐标系(Ou xu yu)的变换关系Fig.2 Image Coordinate(Of uv)and Focal plane Coordinate(Ou xuyu)relation
1.2 各坐标系之间的转换关系
坐标系之间具有一定的转换关系。其中包括:世界坐标系与相机坐标系、相机坐标系与焦平面坐标系、焦平面坐标系与图像坐标系等。
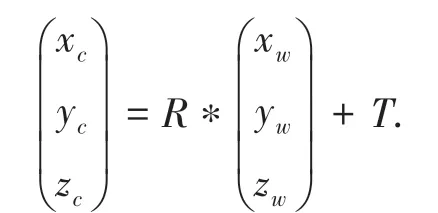
(1)世界坐标系与摄像机坐标系的转换关系
设世界坐标系中物体点的坐标为(xw,yw,zw),物体点在摄像机坐标系中的坐标为(xc,yc,zc),则有:
(2)摄像机坐标系与焦平面坐标系的转换关系
设物体点在摄像机焦平面成像的坐标为(xu,yu),则有:
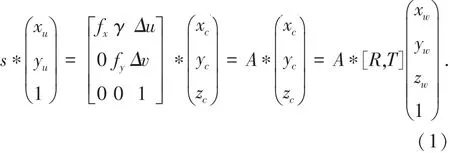
其中,s为比例系数;fx、fy分别为镜头焦距在x、y轴方向的值;γ为成像平面与光轴不垂直造成的偏差系数;(Δu,Δv)为像平面中心与光轴穿过像平面位置的偏差值。理想情况下:

则有:
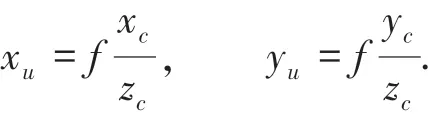
其中,f是摄像机镜头焦距。
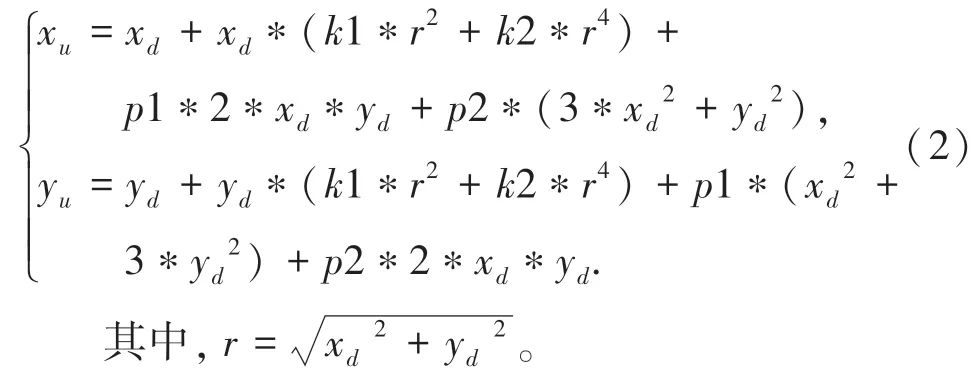
由于摄像机镜头有畸变,实际物体点在焦平面的成像坐标为(xd,yd),其数学模型可以用下面公式描述[2]:
(3)焦平面坐标系与图像坐标系的转换关系
设物体点在图像上的像素坐标为(u,v),则有:

其中,Nx、Ny分别是焦平面上横向、纵向单位长度的像素数,(u0,v0)是焦平面坐标系的原点Ou在图像坐标系中的像素坐标,一般在图像中心(通过实验发现,u0,v0值对总的标定精度影响不大[4])。
1.3 面阵CCD摄像机镜头综合畸变模型
对于面阵CCD摄像机来说,Nx、Ny值是固定的(厂家已给出)。如果厂家给出的Nx、Ny参数不准确,或者CCD传感器阵面排列有畸变,导致由像素坐标(u,v)和公式(3)推算出来的物体在焦平面的成像位置与实际位置不一致,则可以把这种由CCD阵面排列畸变引起的偏差归并于摄像机镜头,而认为CCD阵面是整齐排列的,且Nx、Ny参数值是精确的。这时,摄像机镜头畸变模型由公式(2)改为:
其中,xd、yd是由像素坐标(u、v)和公式(3)计算出来的,并不一定是实际成像位置,Fx、fy是关于xd、yd的某种函数,反映的是摄像机镜头和CCD面阵的综合畸变。
2 摄像机内外参数的求解
假设,已知摄像机镜头和CCD面阵的综合畸变模型(例如,函数fx、fy为关于xd、yd的某种多项式),以及单平面靶标上n个点的世界坐标(xw,yw,zw)和二者在图像上对应点的图像坐标(u,v)。计算摄像机的内外参数(包括外参数R、T,和内参数A、镜头综合畸变参数等)的步骤如下:
第一步:设相机理想模型和镜头综合畸变模型。
若已知镜头综合畸变模型函数fx、fy分别为:
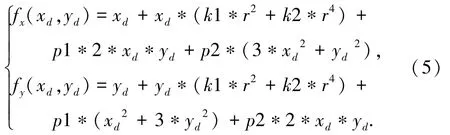
设其中各畸变参数的初始值分别为:k1=0,k2=0,p1=0,p2=0。且设式(1)中的初始值为:fx=fy=f,γ=0,Δu=0,Δv=0。
第二步:计算R、T、f初值。
因

由于平面靶标上的点是共面的,则设zw=0,所以有:

设靶平面上n个点的世界坐标为(xwi,ywi,zwi),其对应的一幅图像坐标为(ui,vi),(i=1,2,…,,n),根据公式(3)可以计算出(xdi,ydi)、根据公式(5)可以计算出fxi=fx(xdi,ydi)和fyi=fy(xdi,ydi),所以有:

整理可得线性方程组:
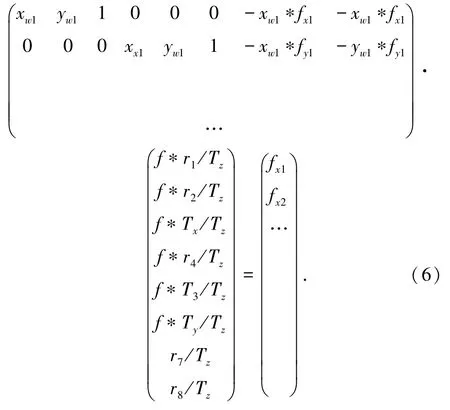
式(6)可以写为Ax=b。其中A矩阵共有8列2n行,向 量x=(x1,x2,x3,x4,x5,x6,x7,x8)'=(f*r1/Tz,f*r2/Tz,f*Tx/Tz,f*r4/Tz,f*r5/Tz,f*Ty/Tz,r7/Tz,r8/Tz)'的元素是8个待求的未知数,向量b=(fx1,fy1,...,fxn,fyn)'为已知。只要知道平面靶标上4个以上点的世界坐标和对应的图像坐标,就可以用最小二乘法求解,即对于线性方程组Ax=b,解为x=(A'A)-1(A'b)。
因为R是正交矩阵,所以存在关系式:

由此,可解出f/Tz,从而算出r1、r2、r4、r5、Tx、Ty。
同样因R是正交矩阵,则有关系式:

所以有如下方程:
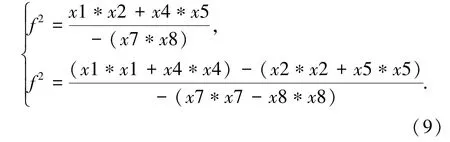
从而可解出f、算出Tz,同时可算出r7、r8(r7=x7*Tz、r8=x8*Tz)。可由R前两列向量叉乘算出第三列向量(r3、r6、r9),即:
这样,可求得R、T、f初值。为A的初值。
第三步:计算优化标定解。
假定平面标定板上有n个标记点,相机拍摄一幅标定板图像,则制定评价函数[5]如式(11):

其中,mi为第i个点的图像坐标;Mi为第i个点的空间坐标;m(A,R,T,k1,k2,p1,p2,Mi)是通过这些已知量,根据式(1)、(2)、(3)求得的图像坐标。使评价函数最小的A,R,T,k1,k2,p1,p2就是问题的最优解,即标定结果。利用Levenberg-Marquarat来求解非线性最小二乘问题,初始估值为上面求得的R、T、A矩阵初值,k1,k2,p1,p2初值为0。这里是优化一幅图像的标定,为了提高景深标定的精度,也可以增加图像数量。如果是多幅图像,则是多个位姿Rk、Tk,和多幅拍摄点mki(k=1,2,...)同样可以用(11)式求优化解。
3 实验结果
实验中采用平面标定块,如图3所示。靶标上各圆心的世界坐标见表1,其对应的图像像素坐标见表2;实验使用sony面阵CCD摄像机,分辨率为1024*1280,Nx=1/0.005 2(像素/mm),Ny=1/0.005 2(像素/mm);设(u0,v0)=(640,512)。
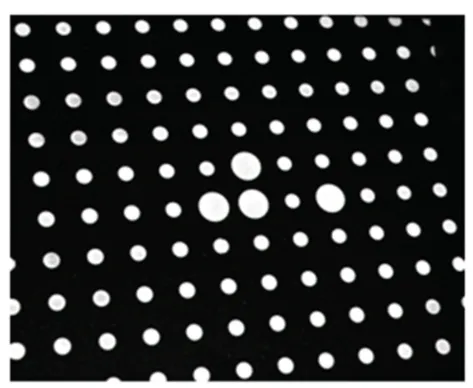
图3 实验使用的平面标定块Fig.3 Testing calibrate board
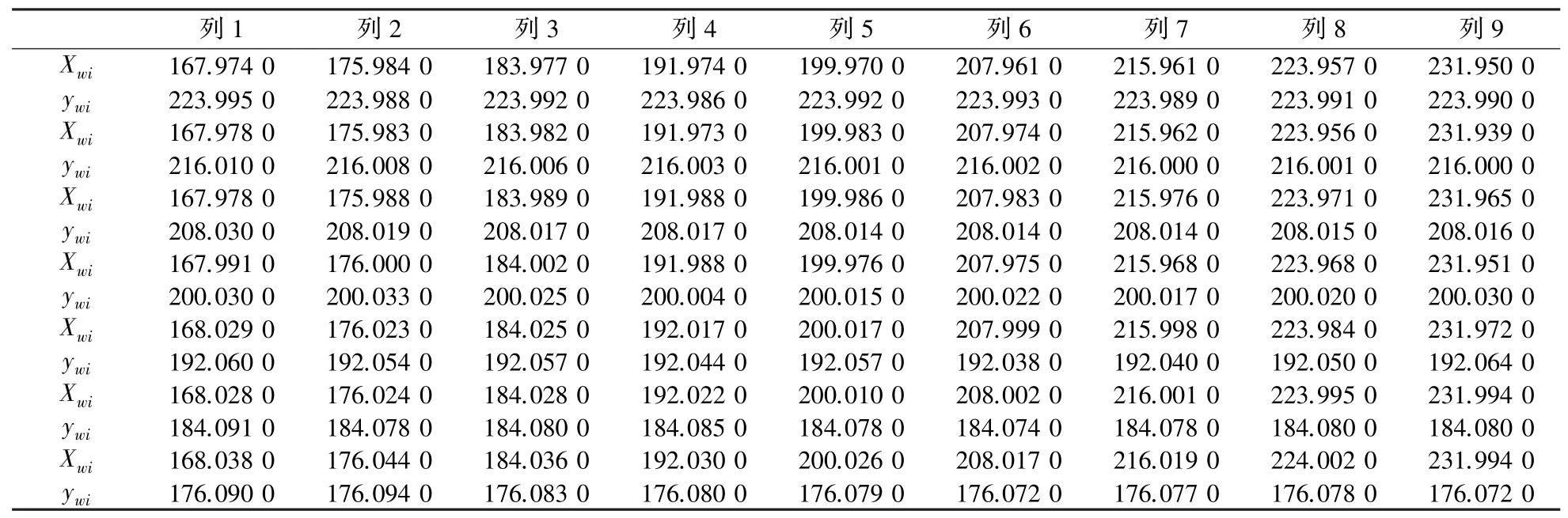
表1 平面标定板的圆心世界坐标(zwi=0,63个点,单位mm)Tab.1 The world coordinates of centers of circles on the calibrate board(zwi=0,63 points)
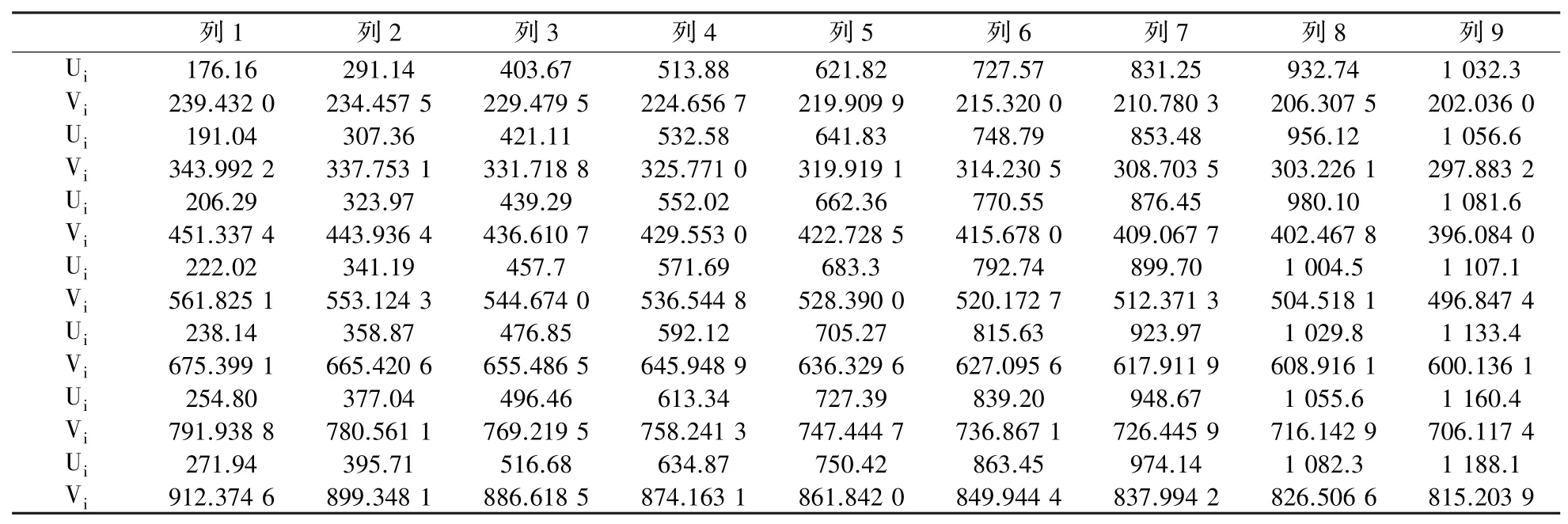
表2 平面标定板的圆心图像坐标(63个点,单位:像素)Tab.2 The image coordinates of centers of circles on the calibrate board(63 points,unit:pixel)
根据摄像机特性,设该摄像机镜头综合畸变模型为式(5),由上述方法求出R、T、A、k1、k2、p1、p2的值,见表3。
实验结果:

其中(ui,vi)为圆心实际图像坐标,(ui′,vi′)为由参数R、T、A、k1、k2、p1、p2计算出来的圆心图像坐标。在普通Intel_i7处理器的电脑上算法运行时间小于1 s。
4 结束语
通过实验可以发现,摄像机镜头综合畸变模型函数fx(xd,yd)、fy(xd,yd)设为上述式(5)函数,或者Tsai方法[6]提到的畸变模型函数时,标定结果都是稳定的。采用本标定方法,标定板不能正对相机,否则标定误差较大。标定板法向与相机光轴之间的夹角应大于10°,一般取30°~45°比较合适。这也表明畸变参数的标定计算需要在一定景深范围内进行。本方法的优点是:只使用平面靶标,一幅图像,操作简捷快速,而且适用于任何种类的镜头畸变模型。与张正友方法相比,本方法只要拍摄一幅图像,就能计算相机初始参数,再利用Levenberg-Marquarat方法求优化解,具有更大的灵活性。
