基于动态规划插电式并联混合动力汽车能量管理控制策略的研究
2021-09-30任崇岭刘慧军
任崇岭, 刘慧军
(1.浙江众泰汽车工程研究院,浙江 杭州 310010; 2.浙江大学 动力机械及车辆工程研究所,浙江 杭州 311100)
0 引 言
近几年,随着能源短缺及环境污染等问题的凸显,使电动汽车越来越受到重视。电动汽车具有无排放且可重复充电的优势,但是电池价格高、续航里程短、充电时间长等缺点极大地限制了纯电动汽车的普及。混合动力汽车相对于纯电动汽车有着续航里程长、动力性良好等优点,但是在化石燃料转换成电能方面却存在转换效率低等不足[1-2]。因此合理利用电机驱动和回收能量,合理利用发动机行车发电、怠速发电、能量回收等能量管理策略对混合动力汽车来说至关重要。对于各种不同架构的混合动力汽车,并联式混合动力结构是效率最高的一种架构。并联式架构的优势主要是发动机或电机单独驱动,或者两者同时驱动。当前学术界对混合动力汽车能量管理策略的研究比较热门,其中动态规划(dynamic programming,DP)已经被广泛应用到能量管理的研究和应用中[3-5]。文献[6]提出了随机动态规划算法、人工神经网络算法及基于规则的能量管理策略,并对三者进行了分析和比较;文献[7-8]提出了随机动态规划的算法优化混联式混合动力客车能量管理策略,并利用隐式马尔科夫链模型的性质及当前时刻需求功率的统计规律预测下一时刻的需求功率,最终随机动态规划仿真结果优于基于规则的控制策略;文献[9]利用动态规划算法解决能量管理策略中基于油耗最省且满足驾驶性的整车模式切换问题,利用基于规则的模糊系统算法优化控制策略,最终取得了较好的仿真结果;文献[10]利用动态规划对双电机驱动巴士汽车进行控制策略优化设计;文献[11]利用动态规划算法对混联式混合动力巴士汽车能量管理策略的研究,在给定驾驶循环工况的前提下,利用动态规划找到每种模式(串联模式、并联模式、纯发动机模式)的最小成本函数,以电池荷电状态(state of charge, SOC)作为状态变量,通过模型计算得出最优的能量控制策略,但是有效的能量控制策略与零部件功率选型不匹配也会导致整车的油耗升高,进而达不到节能的效果;文献[12]提出建立双层优化模型,巧妙地利用动态规划同时优化能量管理策略和零部件功率的大小,这对整车厂(original equipment manufacturer,OEM)开发混合动力汽车,对混合动力汽车整车控制器能量控制策略的确定及发动机、电机等零部件选型有一定的指导意义。
通过对上述文献的分析,动态规划算法应用于混合动力汽车能量管理策略有一定的优势,基于世界轻型汽车测试循环(world light vehicle test cycle,WLTC)工况,建立动态规划模型优化并联式插电混合动力汽车(P2架构)能量管理策略,所提出的动态规划算法以电池电量SOC在设定范围内变化且发动机燃油最省为目标,以发动机和电机扭矩等为约束条件,最终得出最优的能量控制策略及最终油耗结果。
1 整车模型
1.1 车辆架构及参数
插电式并联混合动力汽车是单轴并联结构,车辆架构如图1所示。车辆架构包括车辆的前轴和关键动力部件,关键动力部件包括发动机、变速箱、ISG(integrated starter generator)电机、主减速器。其中发动机与ISG电机之间通过B1离合器相连,ISG电机与变速箱之间由Bx离合器传递动力。
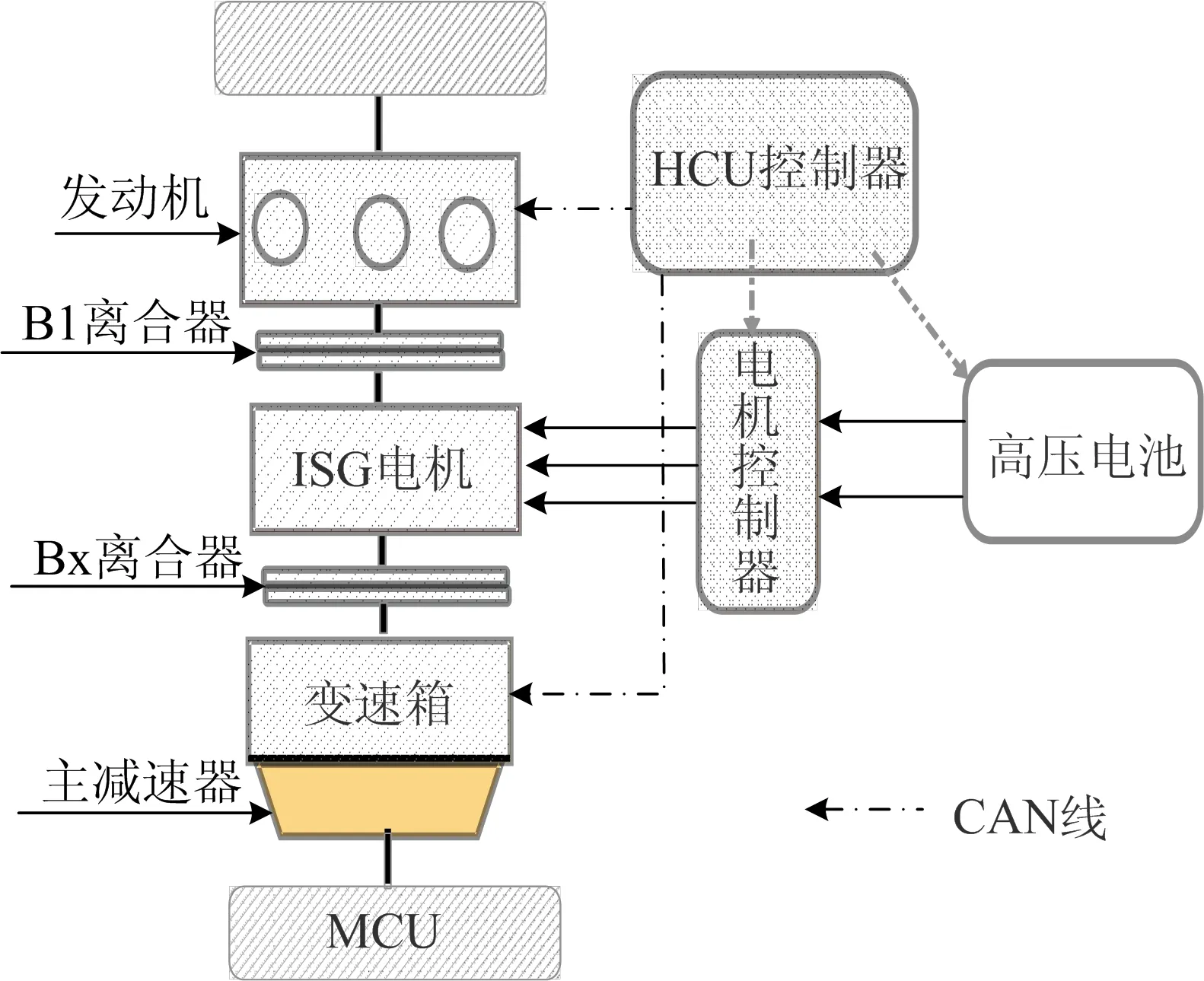
图1 插电式并联混合动力汽车传动简图
该汽车的相关参数如下:整备质量为1 890 kg;发动机参数为GDI1.2T100 kW@4 800 r/min 220 N·m@1 500~4 000 r/min;ISG电机的峰值功率为62 kW、最大扭矩为240 N·m、最高转速为6 000 r/min;高压电池的容量为38 A·h、额定电压为350.6 V;AT变速箱8挡,挡位速比分别为4.26、2.65、1.59、1.34、1.13、0.97、0.80、0.60;主减速比为3.77;风阻系数为0.38;迎风面积为2.64 m2;轮胎半径为332 mm。
1.2 关键动力部件模型
建立车辆仿真模型的方式一般有2种:① 正向建模方式,例如通过Matlab/Simulink搭建模型模拟整个零部件工作原理,这种建模方式计算比较准确,但是模型复杂、计算量比较大、运算时间长;② 反向建模方式,通过定时间步长忽略各个零部件的动态变化情况,这种方式多用来计算整车经济性[13]。
本文采用的动态规划算法是一种反向迭代求解的算法,并利用Matlab建立简化的零部件模型。
1.2.1 发动机模型
本文建立三维查表性质的发动机模型,查表模型输入分别为发动机扭矩和发动机转速,输出为发动机燃油消耗率,结果如图2所示。
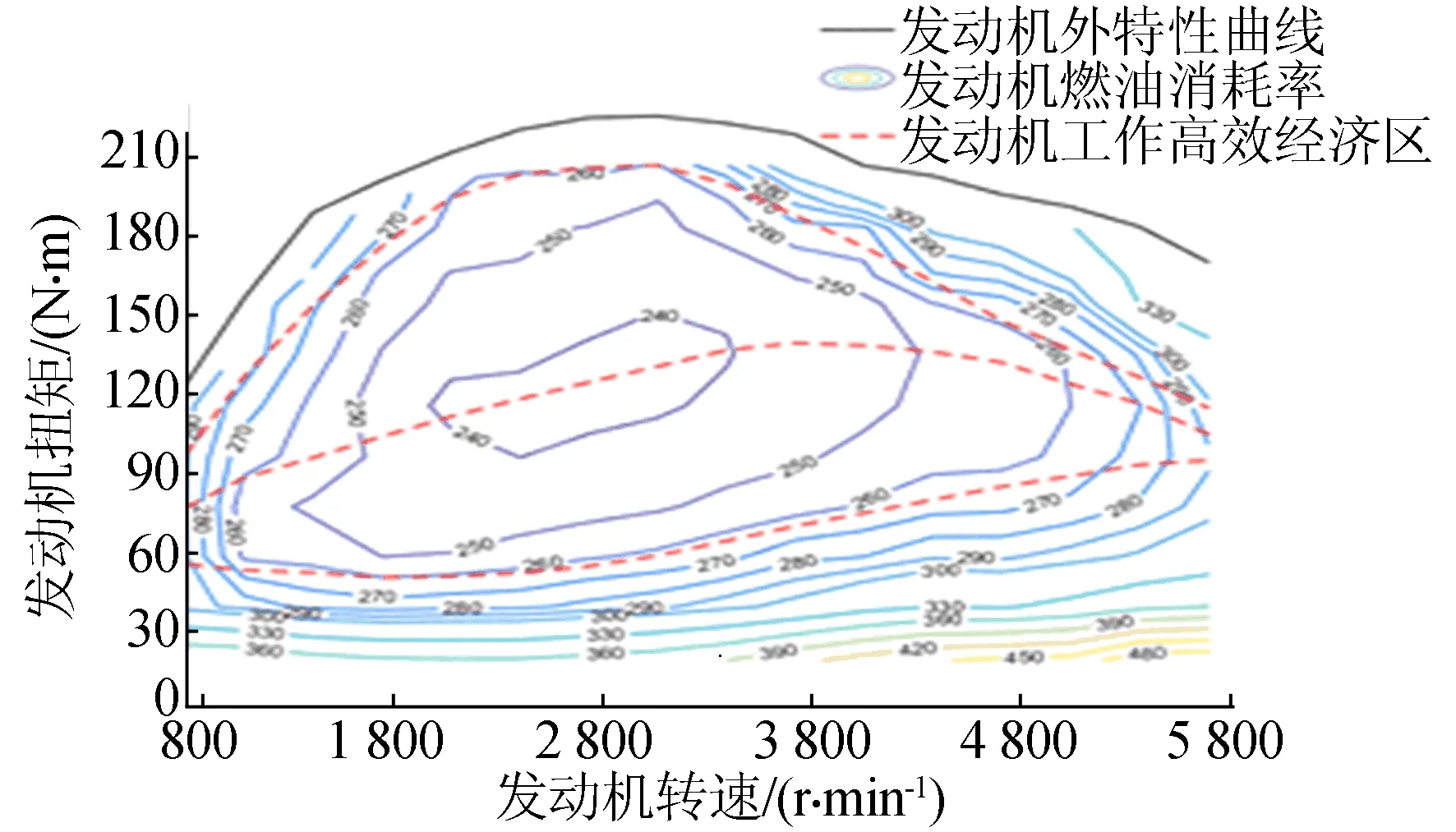
图2 发动机燃油消耗率
燃油消耗质量的计算公式如下:
mFC=rBSFCTengωeng
(1)
其中:rBSFC为查表得出的燃油消耗率;Teng为发动机输出扭矩;ωeng为发动机角速度。
1.2.2 ISG电机模型
本文建立ISG电机模型,也是采用电机台架实验数据建模,依据ISG电机在实验室测得的电机特性数据建立三维查表性质的模型,查表模型输入分别为ISG电机的转速和扭矩,输出为ISG电机的效率, ISG电机效率如图3所示。

图3 ISG电机效率图
由于高压电池充电和放电功率的限制,ISG电机最大、最小输出扭矩的计算公式为:
TISG=
(2)
其中:TISGReq为ISG电机需求扭矩;ωISG为ISG电机角速度;Battsoc为当前可冲的电量值;TISG_Batt_Dischg_max、TISG_Chg_max分别为当前工况下,ISG电机能输出的最大驱动扭矩和最大回收扭矩;TISG_Batt_Dischg_max、TISG_Chg_max分别为当前工况下,基于高压电池充放电可用功率,根据ISG电机角速度计算得出允许ISG的最大驱动扭矩和最大回收扭矩。
1.2.3 高压电池模型
建立高压电池模型,忽略电池充放电时内阻产生的热量引起的电量计算的微小变化,等效为简单电池内阻模型,SOC的计算公式为:

TISGωISGηISG-sgn(TISG))1/2]/(2RintCbatt)
(3)
其中:高压电池的开路电压Voc及电池内阻Rint通过实验室台架测试得到;Cbatt为电池的安时总容量;ηISG为ISG电机的效率。
根据(3)式可以计算出电机驱动或回收时消耗和增加的电量。
1.2.4 整车其他功率计算
从图1中可以看出,变速箱有2个离合器,分别为B1和Bx离合器,其中Bx离合器的作用是传输发动机和电机的扭矩及滑磨换挡;Bx离合器的状态有闭合、滑磨、断开。其中当车辆静止且挡位处于P、N挡时,2个离合器均为断开状态。当行车换挡时,Bx离合器处于滑磨状态;换挡完毕后,Bx离合器处于闭合状态,这时Bx离合器完整地将电机扭矩或电机与发动机扭矩通过主减速器传递到车轮。
B1离合器的主要作用是滑磨启动发动机和传输发动机扭矩,有闭合、滑磨、断开3种状态。建立的整车数学模型考虑离合器滑磨到结合的过程是瞬间完成的,忽略启动发动机时B1离合器滑磨损失及换挡过程中Bx离合器滑磨损失,即模型中定义离合器状态有闭合和断开,分别表示为:闭合clutch=1,断开clutch=0。
对于整车总的需求功率和需求扭矩计算,根据汽车理论知识,整车的车轮端的阻力扭矩Twheel表示为:
(Jeng+JISG+Jwheel)αwheel
(4)
αwheel=Δωwheel/Δt
(5)
v=3.6ωwheelRwheel
(6)
其中:m为车辆整备质量;Cd为空气阻力系数;A为车辆迎风面积;fg为地面滚动阻力系数;a为车辆加速度;Jeng、JISG、Jwheel分别为发动机、ISG电机和车轮的转动惯量;αwheel为车轮角加速度;ωwheel为车轮角速度;Rwheel为车轮半径;v为车辆速度。
2 动态规划算法
动态规划是一种多步骤优化算法,基于实车上控制器CAN信号收发间隔及零部件控制器有一定的响应时间,在建立动态规划算法时设定采样时间为1 s,采用逆向求解,根据给定的驾驶循环工况,将其分成m份,从第m阶段开始向前进行计算,在计算每一个阶段时,以最优控制为目标,在给定零部件参数下全局搜索计算出最优的控制变量u(k),在保证发动机燃油消耗最低且维持电量SOC在设定值范围之内,算出最优优化结果。
构建动态规划目标函数为:
(SOCk-SOCtargt)2]
(7)

控制变量的选择。电机扭矩TISG、发动机扭矩Teng、电机角速度ωISG、发动机角速度ωeng的约束条件如下:
x(k+1)=f(x(k),u(k));
TISG_min(nISG(k),SOC(k))≤TISG(k)≤
TISG_max(nISG(k),SOC(k));
Teng_min(neng(k))≤Teng(k)≤Teng_maxneng(k);
ωeng_min≤ωeng(k)≤ωeng_max;
SOCmin≤SOC(k)≤SOCmax;
若B1 clutch=1,则
ωISG(k)=ωeng(k)=ωwheel(k);
若B1 clutch=0,则
ωISG(k)=ωwheel(k),ωeng(k)=0
(8)
其中,函数f表示上述6个约束条件。基于以上目标函数及约束条件,提出了全局优化的动态规划算法计算流程,如图4所示。
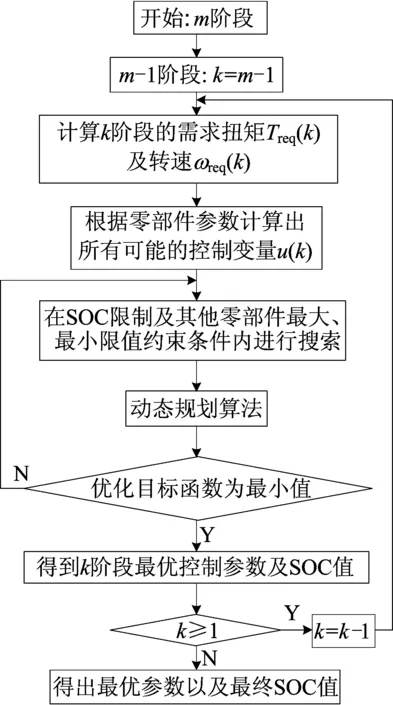
图4 动态规划算法计算流程
动态规划算法计算步骤如下:
(1) 根据WLTC工况,将算法运算设为1 800个阶段(即m=1 800),根据已知各个阶段的车速及整车参数,根据(4)~(6)式计算出车辆在每个阶段轮端的需求角速度ωwheel及需求扭矩Twheel。
(2) 根据步骤(1)中求出的需求扭矩、需求转速,根据设定的SOC上下限值和挡位速比、发动机和ISG电机扭矩最大值和最小值、发动机燃油消耗率和电机效率,插值计算出每个阶段可能的控制变量。控制变量包含发动机扭矩Teng、电机扭矩TISG、发动机角速度ωeng、电机角速度ωISG、总需求扭矩Twheel、油耗质量m_fuel_dot、消耗电量Pcos和电池电流Ibatt。
(3) 从步骤(2)中计算得出的所有可能的控制变量,选择满足 (8) 式约束条件的发动机和ISG电机的扭矩及转速。计算目标函数((7) 式)找到获得最小值的控制变量和各个零部件的状态参数值,优化结束。控制变量状态变化及插值计算示意图如图5所示。图5显示了在x(i)和x(i+1)状态变量变换时,在k阶段的最优控制变量为uk,在k+1阶段,最优控制变量uk+1通过uk+1(j)和uk+1(j+1)插值得到,图中红色线显示的是在k+1阶段,状态变量x(i+1)超过设定SOC的上下限值。

图5 控制变量状态变化及插值示意图
(4) 步骤(2)和步骤(3)中,因为忽略ISG电机与发动机之间B1离合器滑磨状态,所以当B1 chutch=0时,ISG电机角速度等于轮端需求角速度,此时整车处于纯ISG电机驱动模式下;当B1 clutch=1时,ISG电机角速度、需求角速度ωwheel及发动机角速度三者相等,此时车辆处于ISG电机与发动机同时驱动模式下。B1离合器状态的控制,参考需求扭矩来控制其闭合或断开。控制变量计算的流程如图6所示。
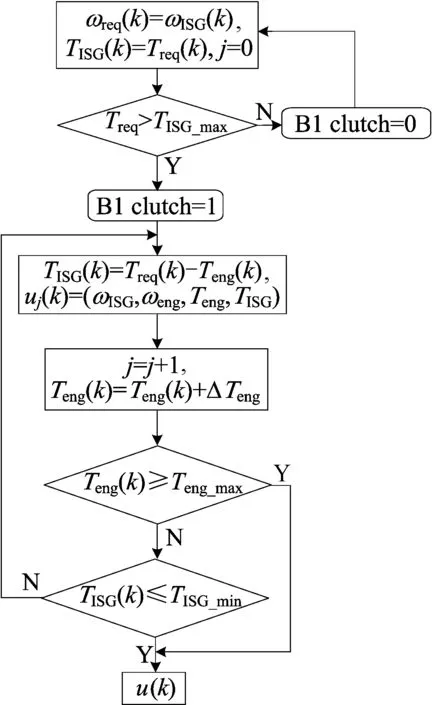
图6 控制变量计算流程
(5) 当车辆处于减速制动或需求扭矩为0时,根据功率跟随的计算方法以及步骤(3)中整车不同模式状态,计算出纯电模式下,ISG电机转速和负扭矩。混动模式下,整车的倒拖扭矩等于发动机倒拖扭矩加电机的负扭矩,计算得出电机负扭矩、转速、发动机转速,其中发动机倒拖扭矩根据台架实验所得。
(6) 令m=m-1,跳转到步骤(2)中进行m-1阶段的运算。
3 仿真结果
本文采用WLTC工况验证动态规划算法,WLTC工况是全球轻型车统一测试循环标准,WLTC工况属于瞬态循环,持续时间为1 800 s,行驶距离为23.25 km,最高车速为131 km/h,工况包括低速段、中速段、高速段和超高速段共4个部分[14]。
仿真前,首先需要设置电量SOC的惩罚因子Nsoc,由于Nsoc的大小会影响动态规划算法运行时间及结果,设置不同惩罚因子进行仿真比较,结果见表1所列,基于仿真油耗及运算时间比较,设定θSOC为0.000 1,电量SOC惩罚因子计算公式[9]为:
NSOC=(SOCmax-SOCmin)/θSOC
(9)

表1 不同θSOC对应油耗及仿真计算时间对比
其中:θSOC为离散化SOC的增量因子;SOCmax和SOCmin分别为约束条件中SOC的最高和最低限制值。
基于WLTC工况进行混合动力汽车高压电池处于最低荷电状态的电量保持模式(charge-sustaining mode)仿真, SOC目标设置SOCtargt=0.290,初始SOC设为0.300。将SOC量化成21段区间。
仿真车速与WLTC驾驶循环车速之间的对比如图7所示,从图7可以看出两者之间误差很小,符合仿真计算的要求。
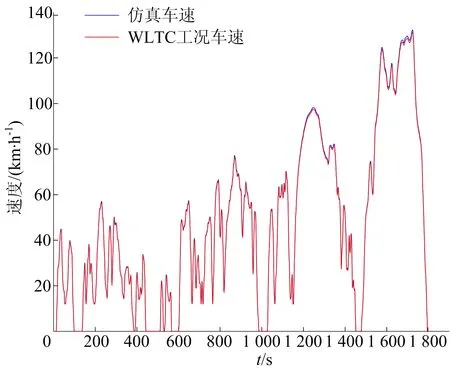
图7 仿真车速与WLTC循环目标车速对比
整个WLTC工况中各部件扭矩、转速、变速箱挡位、高压电池SOC的变化如图8~图11所示。

图8 发动机扭矩、转速仿真结果

图9 ISG电机扭矩、转速仿真结果

图10 变速箱挡位仿真结果
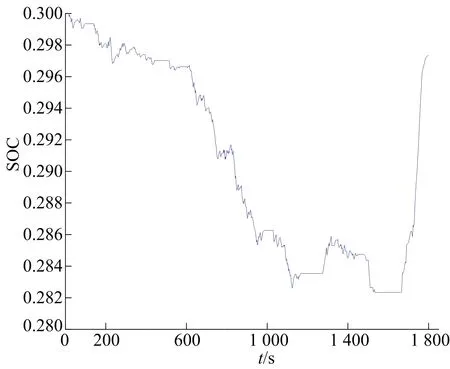
图11 电池SOC仿真结果
从图9可以看出,ISG电机在整个循环中车辆加速行驶时提供了助力,当减速时,进行能量回收。由于ISG电机助力大于能量回收,电池的电量一直是消耗的,在最后减速段ISG电机进行能量回收,驾驶循环终止时电池电量为0.297。
图10中的变速箱挡位图是根据传统原型车变速箱换挡曲线进行多次仿真后优化整理得而出的。
从图9、图10可以看出,ISG电机转速随着车速以及变速箱挡位变化而变化,当车速较低时,发动机并未启动,整车模式是纯电动模式,由ISG电机提供整车的驱动力。
当车速较高时或整车需求扭矩比较大时,发动机参与工作,整车模式为混合动力模式,发动机和ISG电机一起提供驱动力来驱动车辆行驶。当需求扭矩比较小、车辆减速滑行时,发动机熄火,整车模式为纯电动模式,ISG电机进行能量回收。
发动机工作点分布如图12所示。

图12 发动机工作点分布
从图12可以看出,发动机启动之后,发动机的工作点基本都运行在高效经济工作区间中,从而有利于降低油耗。图12中绿色星形标示号表示发动机实际工作点,黑色点表示发动机启动后转速变化轨迹。可以看出发动机启动之后,先经过调速将发动机转速调至与ISG电机转速相同,然后B1离合器闭合,发动机和电机一起驱动车辆行驶,发动机一直运行在高效经济区间中。
ISG电机的工作点分布如图13所示。从图13可以看出,ISG电机大部分工作效率在82%以上,由于车辆低速行驶和蠕行工况只有ISG电机单独驱动,存在图中效率82%以下的情况。仿真计算电池电量消耗为0.002 7,燃油消耗为1.15 kg,换算成百公里油耗为6.68 L。根据国家标准[14]中规定的插电式混合动力汽车电量保持模式实验有效性判断,需要计算修正标准值,计算修正标准值C=0.002 6,小于标准规定的0.01,因此仿真结果有效。
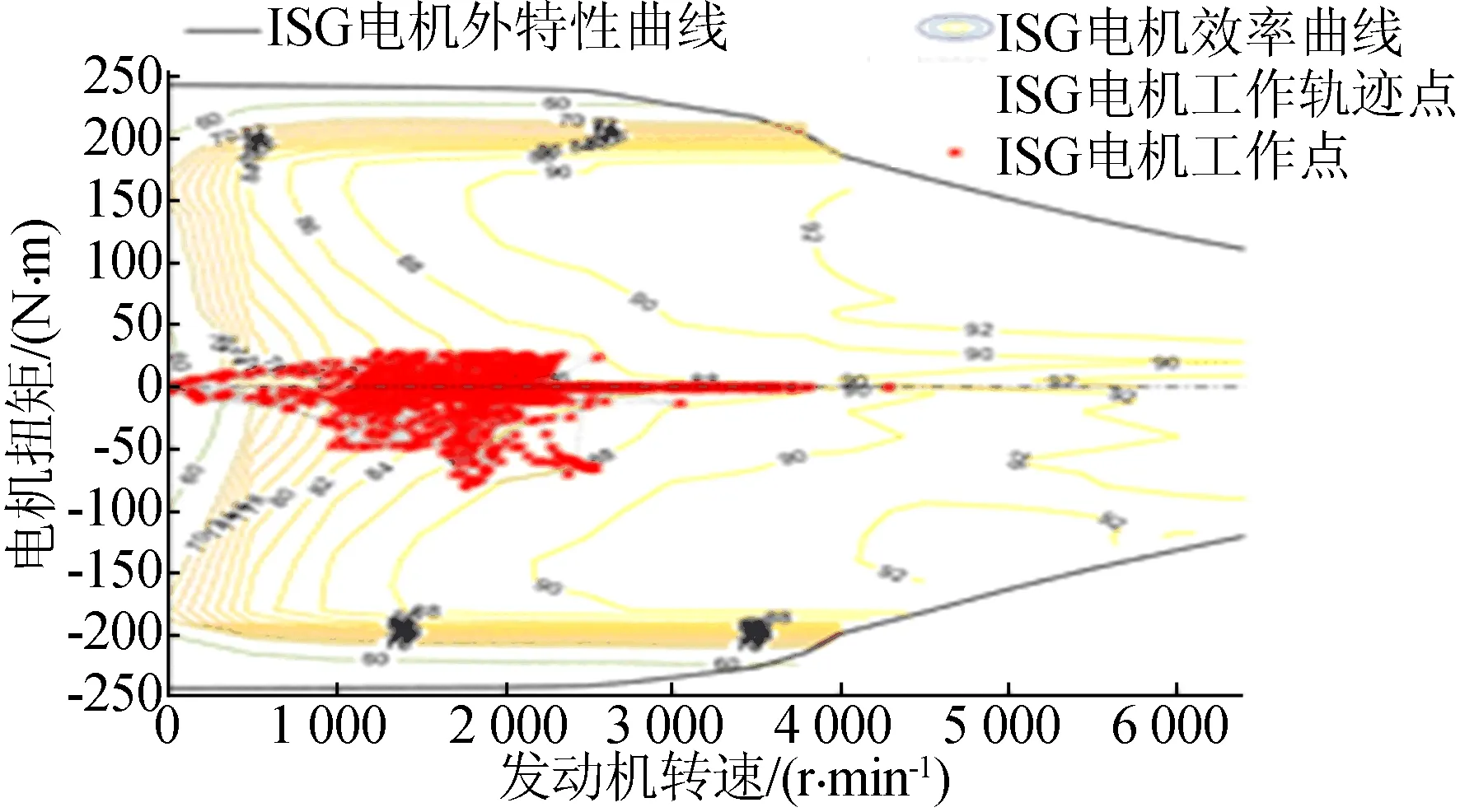
图13 ISG电机工作点分布
通过以上仿真结果的分析,电池SOC基本在预设的区域运行,且最终电量基本保持平衡,发动机启动之后基本运行在高效区域内。为了更好地说明动态规划控制策略对于混合动力汽车燃油经济性的作用,将其分别与OEM标定工程师实车上标定的基于经验规则的控制策略燃油经济性进行了对比。
将动态规划算法仿真结果得出的控制策略标定到实车上,车辆在转鼓实验室进行WLTC循环的油耗实验,插电式并联混合动力汽车转鼓实验室油耗实验如图14所示, WLTC循环油耗电量结果对比见表2所列。

图14 车辆转鼓油耗实验

表2 WLTC循环油耗电量结果对比
WLTC循环油耗及电量变化结果对比如图15所示。
从图15a可以看出,动态规划仿真策略在WLTC前段低速、中速驾驶循环中耗电量要小于基于经验规则的控制策略,其目的是保证电量平衡的基础上,确保后面高速和超高速段电机助力多一些。
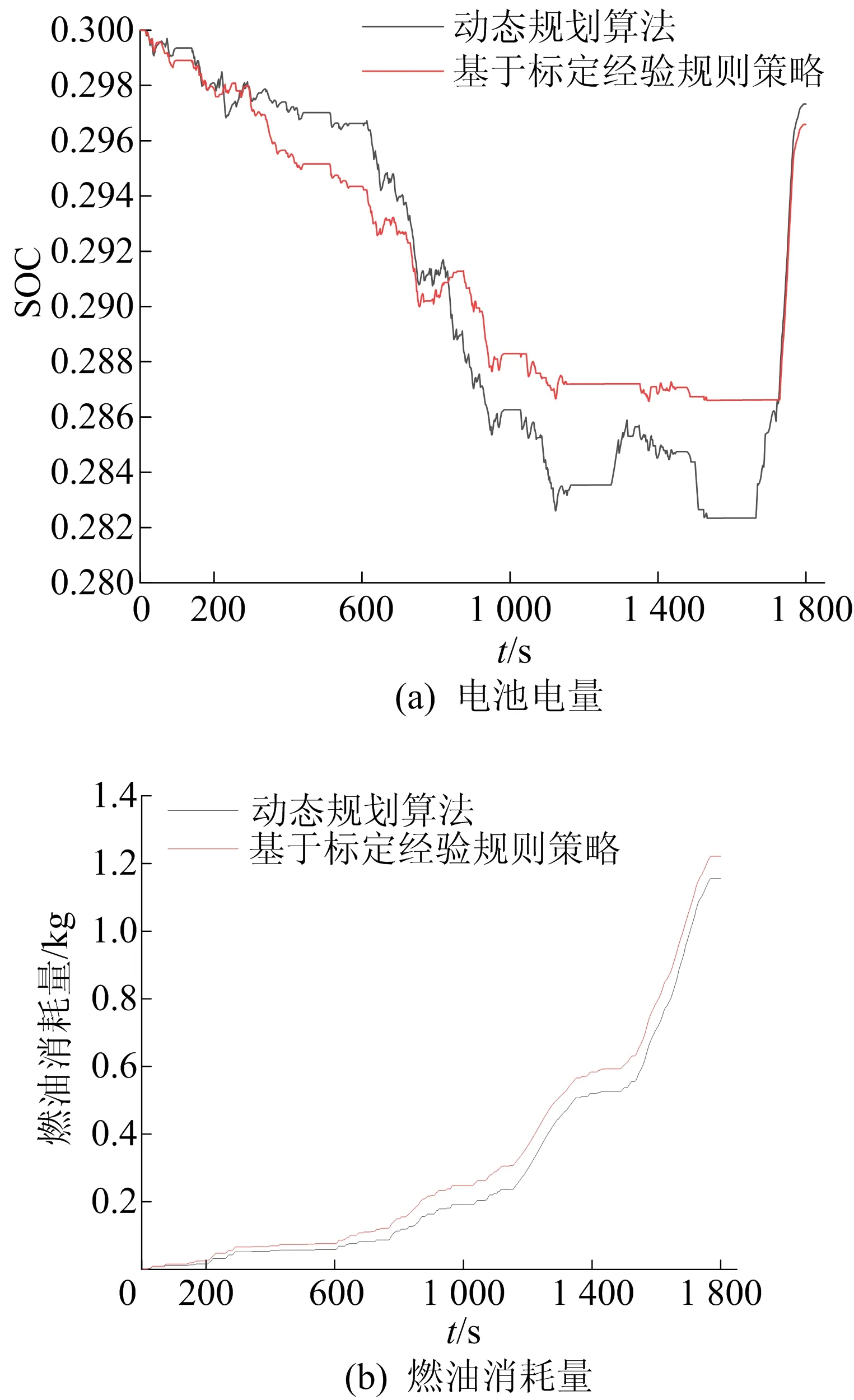
图15 2种方法策略电池电量和燃油消耗量变化
从图15b可以看出,后面高速和超高速段动态规划仿真策略油耗要低于基于经验规则策略,这说明动态规划仿真策略的电机助力扭矩比基于经验规则的控制策略要大,因此整车油耗降低。在WLTC最后减速段,动态规划算法策略将发动机熄火,用ISG电机尽可能多地进行能量回收。基于标定经验规则的控制策略未能将发动机熄火,导致整车的倒拖扭矩中包含了发动机倒拖扭矩,ISG电机回收扭矩和驾驶员的制动力,这导致最后减速段不能充分地使用ISG电机进行回收。从表2中国6标准修正值可以看出本次转鼓油耗测试结果有效,说明动态规划算法策略电量消耗要小于基于经验规则的策略,且百公里油耗要低于基于经验规则的策略。因此动态规划算法得出的控制策略能结合驾驶循环提出合理的发动机起停时机,并根据驾驶循环合理制定电量充放策略,合理调节ISG电机助力及能量回收策略,通过表2实际测试油耗结果可知,动态规划算法控制策略比基于标定经验的规则控制策略百公里油耗降低了5.78%。
4 结 论
本文通过对并联式混合动力汽车动力结构分析,以提高燃油经济性为目的,建立数学模型,根据设定SOC限制及其他约束条件设计了动态规划算法对车辆优化。WLTC工况仿真结果表明,采用动态规划算法计算出的能量管理策略,既能保证电池SOC平衡,又能合理分配发动机和电机的扭矩达到提高燃油经济性的效果,油耗结果比基于经验规则控制策略降低了5.78%。动态规划算法解算得出的能量控制策略、发动机启停策略及功率、扭矩分配策略对OEM混合动力汽车整车控制器能量控制策略的设计开发及标定工作有一定的参考和指导意义。
动态规划算法虽然可以解算出较好的能量控制策略及油耗结果,但需要基于已知驾驶循环进行计算且未考虑发动机排放等因素,因此后期的研究中可以在以上动态规划结果基础上对控制策略进一步优化,同时也可以将发动机排放作为目标函数,增加排放物NOx、CO等约束条件进行连续二次规划。
