基于CAN FD 总线的动静态调度算法研究
2021-09-28赵雅文周美娇吴俊鹏
赵雅文,周美娇,吴俊鹏
(上海理工大学光电信息与计算机工程学院,上海 200093)
0 引言
目前国内外主流调度算法大致分为3 种:①静态调度算法,如固定优先级算法(Fixed Priority Schedule Algorithm,FPA)[5];②动态调度算法,如最早截止期优先算法(Earli⁃est-Deadline-First,EDF)[6]和最小松弛优先算 法(Least-Laxity-First,LLF)[7];③混合调度算法(Mixed Traffic Sched⁃uler,MTS)[8]。根据报文调度过程中的不同要求,可选择合适的算法进行调度。
以上文献中关于报文响应时间的研究为本文分析CAN FD 报文的最坏响应时间奠定了一定基础,但均未将具体的调度算法应用到CAN FD 总线网络中进行验证,以对比不同调度算法的优劣。本文采用固定优先级算法和最早截止期优先算法对CAN FD 总线报文进行调度研究,通过CANoe 仿真平台搭建仿真模型,对两种算法进行仿真对比实验。实验结果表明,最早截止期优先算法对报文的优先级分配更加灵活,在低速传输情况下,报文可以实现全部传输。
1 CAN FD 总线概述
1.1 CAN FD 总线协议
CAN FD 总线是一种基于CAN2.0 协议,且与CAN 共享物理层的现场总线,遵循ISO/OSI 网络标准模型。其弥补了CAN 总线通信速率低的缺点,同时具有基于事件触发、采用短帧格式、遵循非破坏性逐位仲裁规则等特点。CAN FD 总线采用载波监听多路访问/冲突避免(Carrier Sense Multiple Access with Collision Avoidance,CSMA/CA)的媒体访问方式,还可以设置多种拓扑结构,目前在汽车行业应用最多的是总线型拓扑结构。
CAN FD 总线具有3 种报文帧格式,即数据帧、出错帧和超载帧,按照标识符长度又可分为标准帧和扩展帧。CAN FD 数据帧相较于CAN 数据帧新增了扩展数据长度位(EDL 位)、比特率开关位(BRS 位)和错误状态指示位(ESI位),同时采用了新的DLC 编码方式与CRC 算法(CRC 场可扩展至17、21、26 位)。CAN FD 总线以非常高的安全水平支持分布式实时控制,在新一代汽车应用中发挥着重要作用[9]。本文基于具有29 位标识符的扩展数据帧进行研究,CAN FD 扩展数据帧格式如图1 所示。
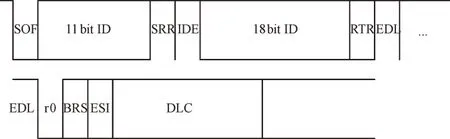
Fig.1 CAN FD extends data frames图1 CAN FD 扩展数据帧
1.2 帧编码
不归零(No Return Zero,NRZ)是目前使用较为广泛的一种编码方式,CAN FD 总线便是采用该种编码方式。此外,为避免总线连续接收到相同的比特位而造成收发双方无法同步,在NRZ 编码时会使用位填充方法对帧起始与CRC 分隔符之间进行编码,即当发送的比特流中有连续5位极性相同的比特位出现时,便会在第5 位后插入1 个极性相反的填充进行界定,以预防突发错误,保证接收方有足够时间进行同步。
CAN FD 总线在CRC 序列中采用新的位填充规则[10],即在固定位置插入填充位。具体填充方法为:首先在CRC序列第1 位之前的固定位置填充1 位,然后在CRC 序列每4位后插入1 个填充位,填充位的极性与前1 位相反。接收器在接收到比特流时,应主动将填充位从比特流中丢弃以进行CRC 校验。如果填充位具有与其前1 位相同的极性,则应检测出填充错误。CAN FD 总线中CRC 序列的固定填充位数等于CAN 总线所产生的最大填充位数。
1.3 标识符编码
在总线通信过程中,需要对报文标识符进行编码设计以保证CAN FD 总线通信的实时性,该步骤是应用层协议与应用系统设计的重要内容之一。报文标识符的作用主要体现在两方面:一是在接收时过滤报文,二是定义报文分配优先级,用于总线竞争。CAN FD 报文标识符的编码设计需遵循以下原则[11]:①每个报文的标识符是唯一的;②预留的节点设备应能满足总线上的最大节点个数,报文空间也要能容纳相应节点内的报文个数;③编码方式应简单实用;④编码后的标识符能够与应用层协议相兼容;⑤优先级越高的报文标识符值越小;⑥遵从CAN2.0A 和CAN2.0B 规范,7 个最高位必须不能全都是1。
本文研究对象是具有29 位标识符的扩展CAN FD 数据帧,分别对扩展帧的高11 位以及低18 位进行编码配置(见图2),具体方案设计如下:
基于对亚洲航线邮轮通关相关的现状分析、政策及制度总结、模型构建以及归纳整理,给出以下七点我国航线邮轮运营便利化建议如下:

Fig.2 CAN FD identifier encoding图2 CAN FD 标识符编码
首先,对可变优先级的高11 位标识符进行配置。预留最高两位标识符用于判断报文类型,同时要满足高7 位不能全为1 的设计规则。本文假设00 表示强实时报文,01 表示弱实时报文,10 表示非实时报文。第26 至18 位用于表示报文的优先级提升段,根据报文的截止时间采用动态编码方式进行配置。
其次,标识符的第17 至13 位用于表示节点号,第12 至9 位用于表示报文号,余下6 位用于表示目的地址,最后3位作为保留位,至此完成标识符编码。
1.4 最坏响应时间
由于多个节点的存在,单路CAN FD 总线在报文传输过程中遇到节点同时访问总线时,会不可避免地发生冲突。此时报文传输需要根据自身优先级竞争总线,获得总线使用权,因此会导致报文延迟传送。CAN FD 总线的报文传输延时主要受4 个方面影响:报文帧、控制器、软件与媒体访问[12]。由于控制器和软件造成的延时微乎其微,可以不用在报文响应时间中体现,因此本文主要分析帧延时与媒体访问延时。
帧延时即报文的传输延迟,是一种由信息串行化导致的延时,时延长度由帧长度和总线传输速率决定,其中帧延时=帧长度/波特率[13]。这种延时在传输少量报文时对报文的最坏响应时间影响最大。媒体访问延时分为两种情况,一是总线在使用中且仍要被占用的时间,另一种是总线被高优先级报文占用,低优先级报文等待释放的时间,即排队延迟。
对于扩展帧格式的CAN FD 报文,其最坏情况响应时间主要针对传输时遇到位填充的场景。最坏情况下即按照位填充的规则,每4 位后填充1 位,直至CRC 分隔符。长度为p 个字节的报文帧的最坏响应时间为:

其中,τcan为CAN 总线的位传输速率,τfd为CAN FD 总线的位传输速率。
2 FPS 调度与EDF调度
固定优先级调度算法(Fixed Priority Scheduling,FPS)由静态调度算法演变而来[14],是总线调度时经常用到的一种算法。该算法根据报文周期或截止期,在报文调度前分配好优先级,保证按照优先级进行调度。应用较多的固定优先级算法为单调速率算法(Rate Monotonic Scheduling,RMS)[15]和截止期单调算法(Deadline Monotonic Schedul⁃ing,DMS)[16]两种,具有额外开销小和实现简单的优点,但存在对事件触发的报文处理不灵活、容错能力差的缺点[17]。
最早截止期优先调度算法(Earliest-Deadline-First,EDF)根据报文的绝对截止时间动态分配优先级,绝对截止时间越小则分配优先级越高,该算法目前较为常用[18]。EDF 调度算法在报文调度时能实时计算报文优先级,满足系统对信息传递的实时性要求。
EDF 是一种动态抢占式调度算法[19],其报文优先级计算方式是对报文截止时间进行编码,采用不同编码方式得出的计算结果会有所不同,通常采用以下平均分区编码方式。
对于一组报文{m1,m2,m3,…,mn},假设它们的相对截止时间从小到大依次排列为{d1,d2,d3,…,dmax},以报文的最大相对截止时间dmax为上限将时间轴均分成k段,则每段区间长为dmax/k。平均分区情况如图3 所示。
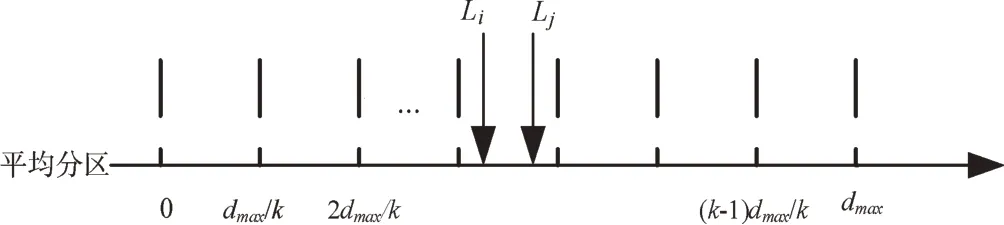
Fig.3 Schematic diagram of mean zoning图3 平均分区示意图
3 实验仿真
3.1 仿真模型
本文采用实验对比分析CAN FD 网络在FPS 算法和EDF 算法下的调度效果。通过CANoe 软件搭建CAN FD 网络模型[20],由4 个节点组成,分别为电池管理节点(BCM)、网关节点(Gateway)、仪表节点(IPC)以及开关节点(Switch),均在1 条CAN FD 总线上,具体如图4 所示。
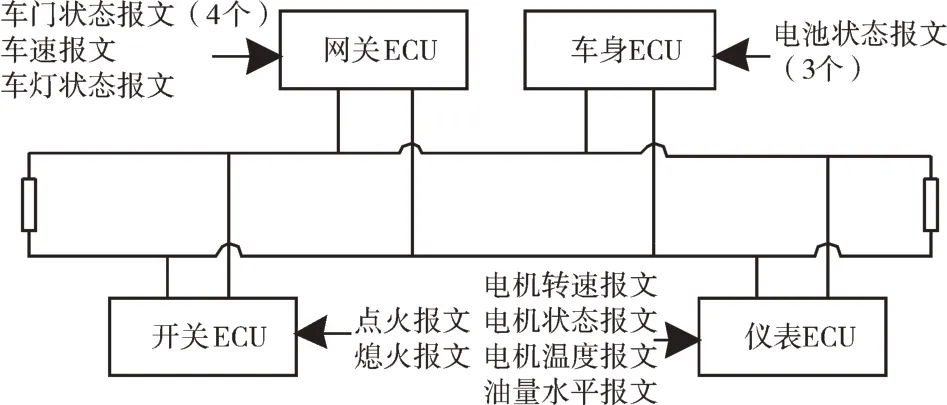
Fig.4 CAN FD system network planning图4 CAN FD 系统网络规划
各个节点根据功能不同共传递15 个报文。电池管理节点包含3 个电池状态报文,均为周期性报文。网关节点包含前后左右车门状态4 个报文以及车灯、车速2 个周期性报文。仪表节点包含引擎转速、温度、油量以及引擎错误状态4 个周期性报文。在仿真周期性报文时只考虑其最坏相应传输时间,开关节点只收发开和关2 个非周期性报文。所有周期性报文数据长度均设置为8 字节,非周期性报文数据长度为1 字节。具体报文参数如表1 所示。
3.2 实验结果
根据报文参数构造仿真数据库中的报文与信号,编写CAPL(CAN Access Programming Language)脚本,在传输速率为250Kbit/s 和500Kbit/s 的情况下分别进行仿真实验。FPS 算法下报文实际传输结果如表2 所示,EDF 算法下报文实际传输结果如表3 所示。
从表2、表3 结果可以看出,当采用FPS 算法进行调度时,Vehicle 类报文由于事先分配的报文优先级较低,在优先级仲裁获取总线访问权时一直失败,无法占用CAN FD总线,最终导致发送失败,错过报文截止期。而当采用EDF调度算法时,所有报文都可以被合理地安排优先级,可占用总线且均能在截止期前正确发出,满足了报文的实时性要求。电池管理节点与仪表节点报文传送结果与实时显示如图5 所示,网关节点与开关节点报文传送结果如图6所示。
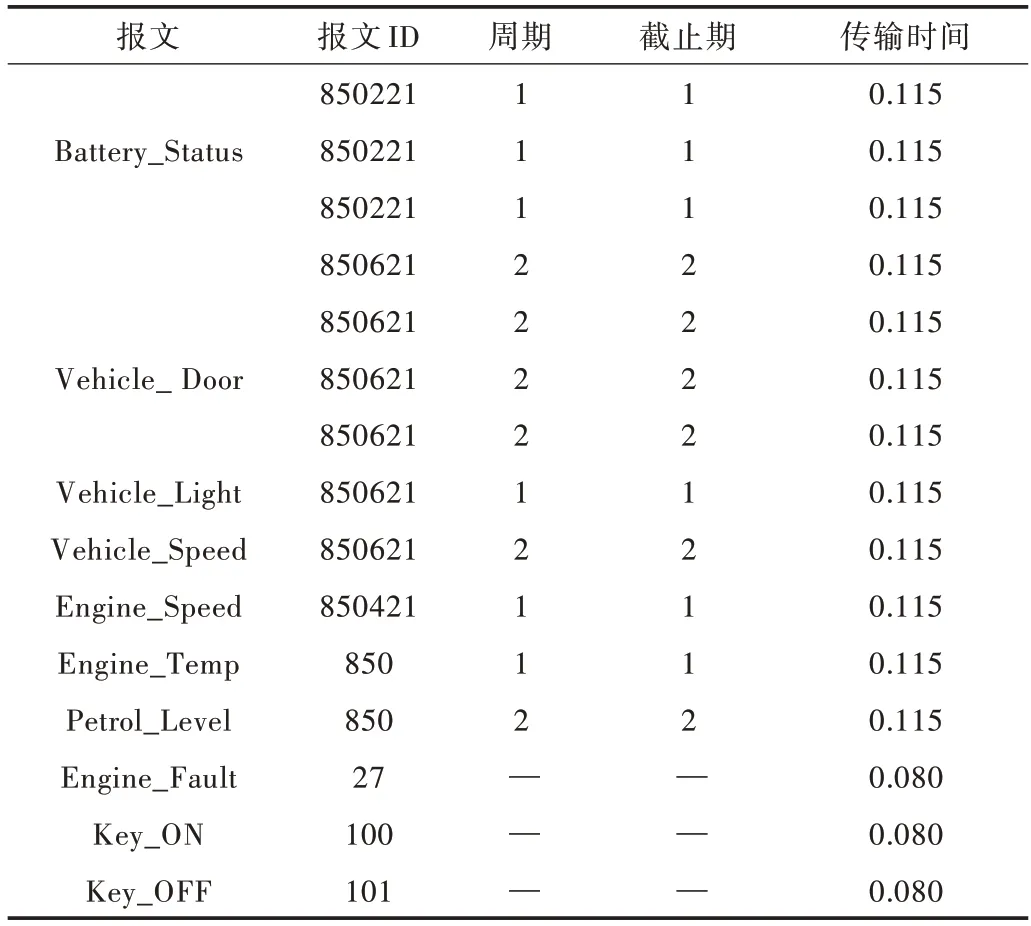
Table 1 Message parameters表1 报文参数单位:ms
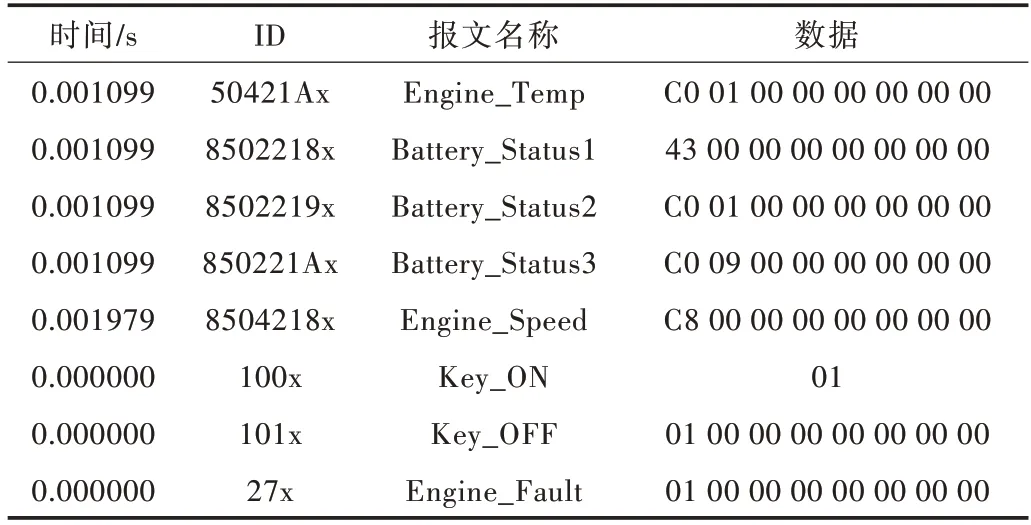
Table 2 Message transmission results of FPS algorithm表2 FPS 算法下报文传输结果
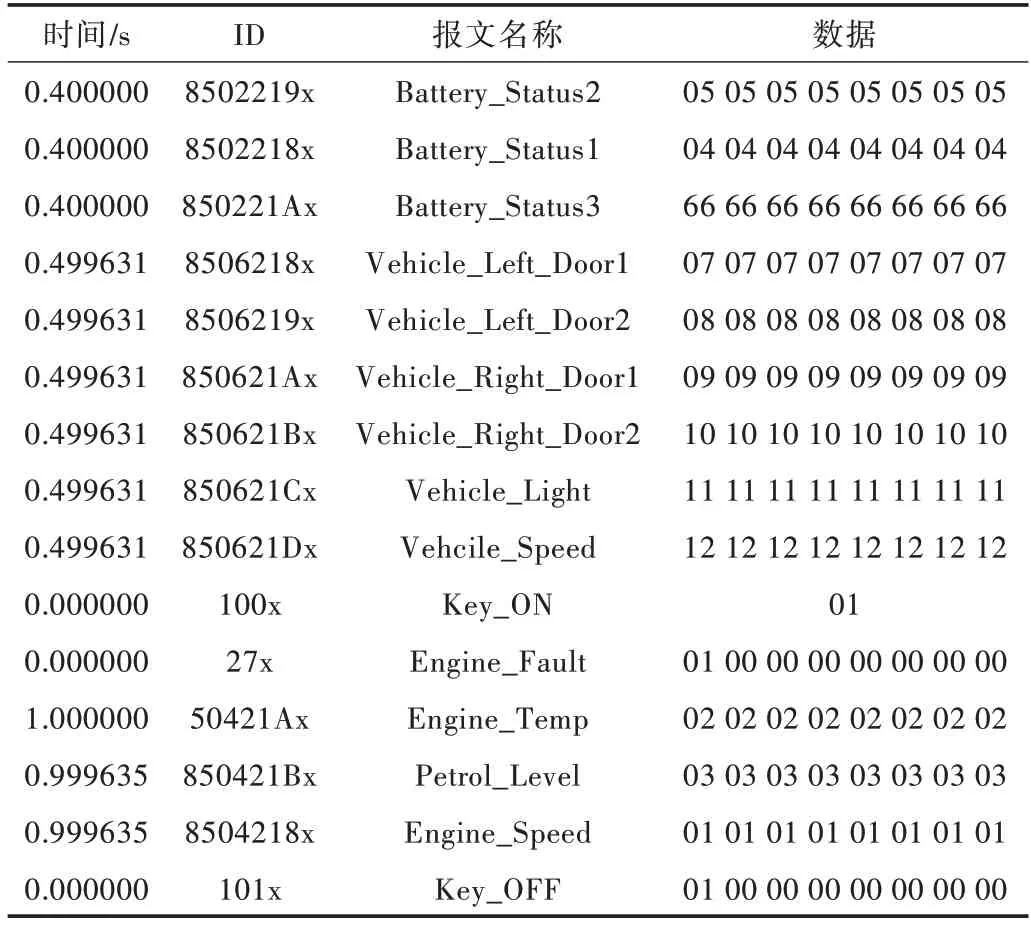
Table 3 Message transmission results of EDF algorithm表3 EDF 算法下报文传输结果
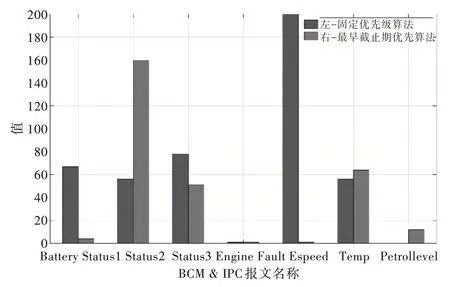
Fig.5 Message scheduling results of BCM and IPC图5 电池管理节点与仪表节点报文调度结果
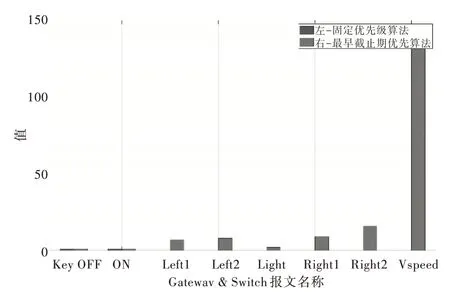
Fig.6 Message scheduling results of Gateway and Switch图6 网关节点与开关节点报文结果
由图中可知,在CAN FD 总线系统中,相较于静态调度算法FPS,采用动态调度算法EDF 进行调度时灵活性更高,能够使报文在截止期前发出,保证报文传送实时性。
4 结语
本文以CAN FD 总线传输理论为基础,分析了报文传输时的最坏响应时间。通过CANoe 仿真平台,分别对FPS算法和EDF 算法在波特率为250Kbit/s 和500Kbit/s 的情况下进行多次仿真实验。结果显示,采用FPS 算法时15 个报文最佳情况下只能正常传送8 个(53%),而采用EDF 算法可以确保15 个报文100%传输。相较于FPS 算法,EDF 算法在报文优先级分配时更加灵活有效,能够避免因错过报文截止期而无法进行调度的情况。此外,CAN FD 总线因具有数据传输速率快、总线利用率高等优点,非常适合当今智能汽车产业需传输大量信号的要求。然而,本文仿真实验是建立在比较理想的条件上,缺乏硬件节点的实际验证,今后需加深该方面研究。
