拖拉机液压与电动2种自动驾驶方式
2021-09-26高帅钟兴高菊玲丁帅
高帅 钟兴 高菊玲 丁帅
摘要:对拖拉机自动驾驶的基本组成及路径跟踪原理进行分析,建立了拖拉机的运动学模型。在东方红954拖拉机上加装液压转向和电动方向盘自动驾驶系统,对2种转向方式的控制系统性能、直线度性能和入线数据进行田间试验研究。现场试验表明,电动方向盘自动驾驶方式的动态性能指标高于液压转向自动驾驶方式,稳态误差略低于液压转向自动驾驶方式,入线米数多数情况下少于液压转向自动驾驶方式,直线度的标准差比液压转向自动驾驶方式低0.55 cm。可见在相同情况下,电动方向盘自动驾驶方式路径跟踪效果和稳定性方面略优于液压转向自动驾驶方式。
关键词:液压;电动;自动驾驶;路径跟踪;直线度
中图分类号:S219 文献标志码: A
文章编号:1002-1302(2021)17-0188-05
收稿日期:2021-02-03
基金项目:江苏农林职业技术学院科技项目(编号:2019kj035)。
作者简介:高 帅(1988—),男,江苏新沂人,硕士,工程师,主要从事智能农机装备研究。E-mail:gaoshuai23@126.com。
通信作者:钟 兴,硕士,副教授,主要从事农业机械设计、制造及自动化研究。E-mail:light200888@163.com。
随着现代科技的不断发展,现代农业正朝着自动化、智能化、信息化的精准农业方向发展[1]。美国[2]、日本[3]、德国[4]等依次提出了精准农业的发展战略方针,“中国制造2025”也致力于发展智能农业装备,推进“互联网+农机”作业模式,开展农机自动驾驶的相关技术研究已经成为一种趋势[5]。
自动驾驶农机是精准农业生产作业的重要装备,是精准农业中最为重要的一环,通过自动控制替代人力,大幅提高农机作业效率[6]。自动驾驶农机技术是利用北斗或GPS等卫星定位系统为主要技术,通过农机控制器和导航系统来自动控制农机,使农机按照用户定义的路径行走[7-9],具有自动驾驶的智能化农机已发展成为现代农业装备技术的新潮流,是近几年来国际上推动农业科学技术研究的重要热点之一[10]。随着农机自动驾驶技术的快速发展,目前市场上出现了2种自动驾驶方式,分别是通过电动方向盘驱动转向轮按照规划好的路径行驶的电动方向盘自动驾驶方式,以及通过电液比例阀驱动转向轮的液压转向自动驾驶方式[11]。
对于这2种自动驾驶方式,行业内的看法不尽相同,各国的学者也分别对液压转向[12-15]和电动方向盘[16-20]2种自动驾驶方式进行了研究,实现了农机的自动转向。但是目前液压与电动2种自动驾驶方式的路径跟踪对比分析研究比较少,如唐天石从技术层面、市场表现和历史回顾方面分析了两者的优劣势[21];李世超等针对不同电机的拖拉机自动导航转向控制系统进行了性能对比[22]。这些研究都对本研究有借鉴意义,本研究在前期工作的基础上,对拖拉机自动驾驶的组成及路径跟踪原理进行探讨,分析液压和电动2种拖拉机自动驾驶方式的区别,最后搭建试验平台,进行两者的田间试验研究,试验测试2种方式的控制系统性能、直线度性能和入线度数据。
1 拖拉机自动驾驶
1.1 拖拉机自动驾驶的组成
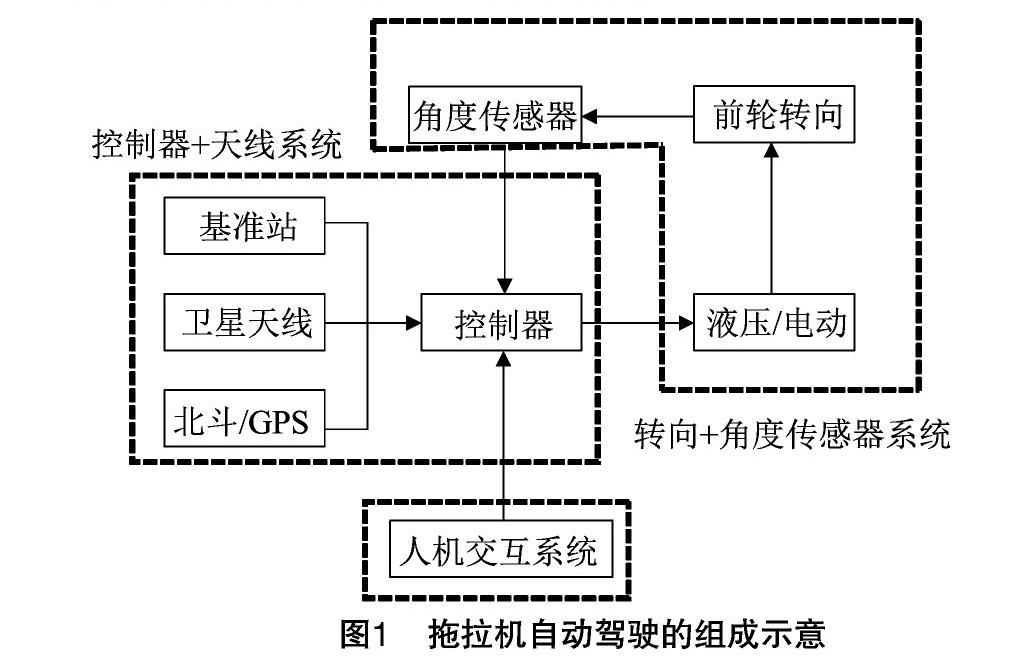
如图1所示,拖拉机自动驾驶系统主要由3个部分组成,分别是拖拉机人机交互系统、拖拉机控制器+天线系统、拖拉机转向+角度传感器系统。拖拉机人机交互系统是拖拉机驾驶员与交互控制系统交互的关键组件,主要包括各种人机交互界面、显示器等,可以规划拖拉机执行路径、设置相关参数,同时可以实时地查看拖拉机路径的航向、作业的场地面积等。拖拉机控制器+天线系统主要包括控制器、基准站、卫星天线、车载信号接收机等,该系统高度集成化,可以完成拖拉机的卫星定位、决策和远程控制,能够实时准确地定位拖拉机的位置与姿态,计算出拖拉机实际行驶路径与规划路径之间的偏差,并进行最优求解,规划最优路径,并将拖拉机实时数据反馈给拖拉机执行机构,使拖拉机始终准确地按照规定航线进行行駛[23]。拖拉机转向+角度传感器系统主要包括拖拉机转向执行子机构和角度传感器,它能够快速地实时响应控制器所发送的转向指令,从而自动控制拖拉机的转向,并将实时数据检测结果进行反馈。
1.2 拖拉机路径跟踪原理
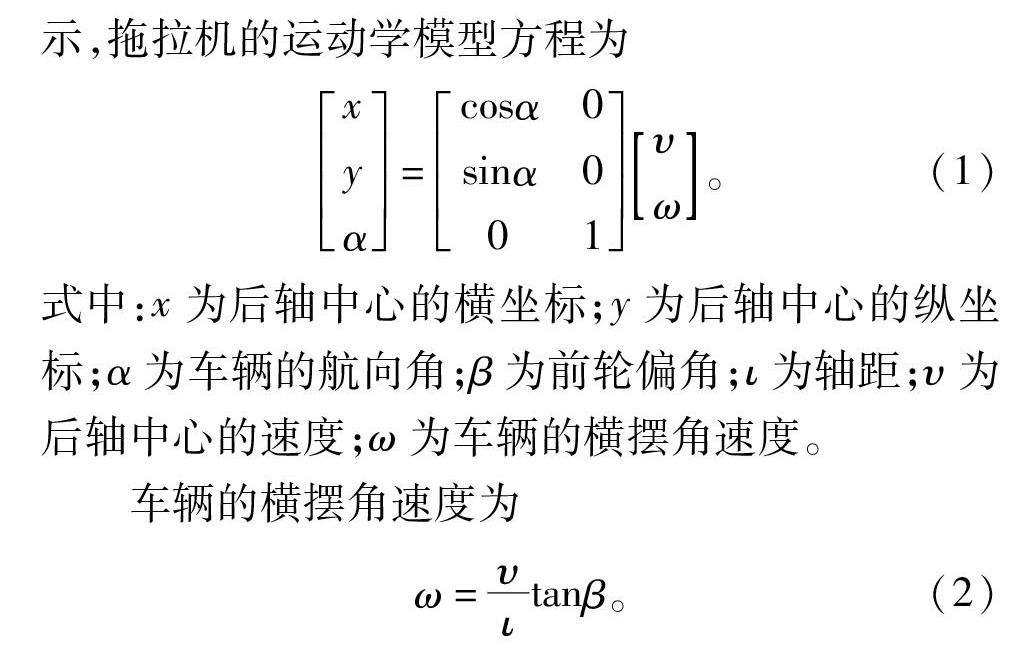
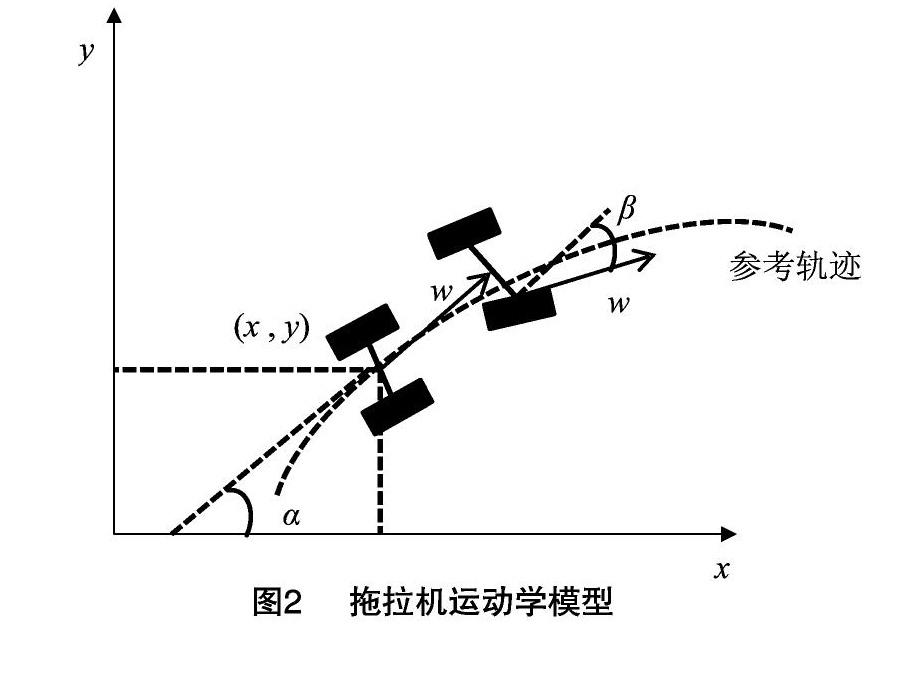
拖拉机路径跟踪作为拖拉机自动驾驶中的关键执行层控制技术,是影响车辆安全性与舒适性的关键技术。拖拉机路径跟踪由路径跟踪控制器执行,它是通过不断生成速度和转向命令来自动补偿跟踪误差,从而使拖拉机沿着已经规划好的路径继续前进[24],主要参数包括拖拉机偏离路径的距离与航向角。常见的路径跟踪方法按照使用模型的不同分为动力学模型和运动学模型。其中运动学模型通常将拖拉机车辆转换成四轮驱动的机器人刚性机构,因拖拉机运动时属于低速行驶,所以不需要考虑动力学问题,因此采用运动学模型设计的轨迹跟踪控制器具有可靠的控制性能[25],如图2所示,拖拉机的运动学模型方程为
xyα=cosα0sinα001υω。(1)
式中:x为后轴中心的横坐标;y为后轴中心的纵坐标;α为车辆的航向角;β为前轮偏角;ι为轴距;υ为后轴中心的速度;ω为车辆的横摆角速度。
车辆的横摆角速度为
ω=υιtanβ。(2)
通过运动学模型方程可以看出,通过对后轴中心速度υ和车辆的横摆角速度ω的控制,就可以实现拖拉机在坐标系里不同位置和姿态的运动。常见的控制算法有模型预测控制(MPC)、比例积分微分控制(PID)、滑模控制(SMC)以及模糊控制(FC)等,多种控制方法的结合会使得路径跟踪的效果更加准确,在此不再一一进行赘述。
2 液压转向与电动方向盘自动驾驶的区别
拖拉机自动驾驶方式按照执行机构主要分为2种,一种是电动方向盘自动驾驶,另一种是液压转向自动驾驶[26]。2种不同驾驶方式分别是从不同的技术产品以及应用演化而来,液压转向自动驾驶方式是在历年农机无人驾驶技术的研究基础上简化而来,而电动方向盘自动驾驶则由目前全球导航迭代升级而来。电动方向盘自动驾驶由于不需要改变农机的原有转向系统,且安装方便、结构简单而得到行业用户的广泛青睐,而液压转向自动驾驶则需要对原有转向系统如油路和结构性能作重大改变,常用于大型农场机械作业[21]。
(1)电动方向盘自动驾驶:工作原理是控制器通过分析拖拉机角度传感器信息,计算出转向轮期望转角以及转向力矩,控制电机为4个转向轮提供所需要的转向力矩,实现自动转向。通常由车载卫星天线、数据处理器模块、角度传感器、电动方向盘、导航系统模块以及其他线路组成。
(2)液压转向自动驾驶:工作原理是控制器通过分析拖拉机角度传感器信息,自动计算转向轮的期望转角与实际转角的差值,通过控制电磁阀阀芯来改变液压油的流向与速度,进而控制转向轮的偏转方向和转动角度。通常由车载卫星天线、数据处理器模块、角度传感器、液压阀、ECU控制器以及其他线路组成。
3 材料与方法
3.1 试验条件和试验设备
试验在江苏农博园的农机作业实训场地中进行,行进速度分别选取适合江苏地区的免耕播种作业速度3、5、7 km/h。试验现场采用的是由东方红954拖拉机加装的液压转向和电动方向盘的自动驾驶拖拉机,控制器采用双天线解决方案、MPC控制算法,可在车辆静止时确定航向,避免出现起步弯,并在低速工作中,保证良好的直线度。电动版内置惯导模块,可以对全地形进行补偿,保证拖拉机在坡地高速等作业工况时,仍能保持精度。车轮转角状态采集采用非接触式(Gasensor)类型的角度传感器,车身角度分别选择平行和倾斜45°进行测试。
3.2 评价性能指标
本次路径跟踪分析试验采用3个评价性能指标,分别是控制系统的性能指标、入线米数和直线度。分析2种不同驾驶方式的控制系统性能指标以及前进和倒退时AB线的直线度和入线米数。
(1)拖拉机控制系统的性能指标主要包括动态和稳态性能指标。动态指标包含超调量、延滞时间、上升时间、峰值时间、调整时间等;稳态性能指标用稳态误差进行衡量。
(2)入线米数:实际路径逼近参考路径时所需要的距离。
(3)直线度:实际路径在纵向跟踪过程中的误差。
4 田间试验与结果分析
4.1 控制系统性能分析
以5 km/h的前进速度在江苏农博园农机作业实训场地进行液压转向和电动方向盘驾驶方式控制系统的阶跃响应测试试验,分别选取1、3、5、10、15、20、25、30等8种不同的转角角度来进行分析研究。
4.1.1 动态性能分析 测试试验中液压转向和电动方向盘驾驶方式均没有超调量,在此不再作分析。从图3可以看出,随着转角角度的增大,2种方式的延滞时间、上升时间、峰值时间、调整时间也呈上升趋势。转角角度在20°以下时,电动方向盘方式的动态性能指标明显高于液压转向方式。
4.1.2 稳态性能分析 从图4可以看出,随着转角角度的增大,2种方式的稳态误差呈下降趋势,且电动方向盘方式的稳态误差明显低于液压转向方式。
4.2 入线数据分析
从表1和表2可以看出,在同一车辆速度和车身角度条件下,入线米数随着距离线位置的增加而增加;在同一距离线位置和车身角度的条件下,入线米数随着车辆速度的增加而增加;在同一款车辆速度和距离线位置的条件下,车身角度增大,入线米数明显增大;电动方向盘方式除了在车身平行车辆前进速度在3、7 km/h的情况下,其他大多数情况入线米数均小于液压转向方式。
4.3 直线度分析
从表3可以看出,液压转向和电动方向盘方式均能保持良好的直线度,可以保证在±2 cm的精度内。经过数据处理后可知,液压转向自动驾驶方式的标准差为1.31 cm,电动方向盘自动驾驶方式的标准差为0.76 cm,由结果可以看出,电动方向盘自动驾驶方式直线度略好于液压转向自动驾驶方式。
5 结论
本研究针对目前液压和电动2种自动驾驶方式路径跟踪分析进行了深入研究,对拖拉机自动驾驶的基本组成及路径跟踪原理进行了探讨,分析液压和电动2种自动驾驶方式的区别,随后进行了田间试验研究,试验测试2种方式的控制系统性能、直线度性能和入线度数据,得出以下结论:(1)液压转向和电动方向盘自动驾驶方式控制系统的阶跃响应测试试验结果表明,电动方向盘自动驾驶方式的动态性能指标高于液压转向驾驶方式,稳态性能优于液压转向自动驾驶方式;(2)在相同条件下,电动方向盘自动驾驶方式在多数情况下入线米数少于液压转向自动驾驶方式,直线度的标准差比液壓转向自动驾驶方式低 0.55 cm。
本研究发现,液压和电动2种自动驾驶方式都能保持良好的路径跟踪效果和稳定性,同时满足农业生产需求,但电动方式略优于液压方式,且由于产品不需要改变原有转向系统、安装方便,从而得到行业用户的广泛青睐。
参考文献:
[1]谭晨佼,李轶林,王东飞,等. 农业机械自动导航技术研究进展[J]. 农机化研究,2020,42(5):7-14,32.
[2]Zhang N Q,Wang M H,Wang N. Precision agriculture—A worldwide overview[J]. Computers and Electronics in Agriculture,2002,36(2/3):113-132.
[3]Morimoto R,Hayshi K. Design of smart agriculture Japan model[J]. Advances in Animal Biosciences,2017,8(2):713-717.
[4]Michael C. Farming 4.0 und andere anwendungen des Internet der dinge[J]. Gesellschaft für Informatik,2016(33):15-18.
[5]刘成良,林洪振,李彦明,等. 农业装备智能控制技术研究现状与发展趋势分析[J]. 农业机械学报,2020,51(1):1-18.
[6]Li S C,Xu H Z,Ji Y H,et al. Development of a following agricultural machinery automatic navigation system[J]. Computers and Electronics in Agriculture,2019,158:335-344.
[7]秦 宇,周 宇,赵 亮. 面向农机自动驾驶的5G/大数据技术应用展望[J]. 邮电设计技术,2020(5):36-40.
[8]章军辉,陈大鹏,李 庆. 自动驾驶技术研究现状及发展趋势[J]. 科学技术与工程,2020,20(9):3394-3403.
[9]王金强,黄 航,郅 朋,等. 自动驾驶发展与关键技术综述[J]. 电子技术应用,2019,45(6):28-36.
[10]郑文钟. 国内外智能化农业机械装备发展现状[J]. 现代农机,2015(6):4-8.
[11]孙连烛,张兆国,付卫强,等. 拖拉机电液与电机两种自动转向方式对比试验[J]. 农机化研究,2021,43(6):253-258.
[12]陈文良,宋正河,毛恩荣.拖拉机自动驾驶转向控制系统的设计[J]. 华中农业大学学报,2005(增刊1):57-62.
[13]张智刚,王桂民,罗锡文,等. 拖拉机自动驾驶转向轮角检测方法[J]. 农业机械学报,2019,50(3):352-357.
[14]Ma J F,Wang D C,Tang Y W,et al. Automatic control system of agricultural machinery based on Beidou navigation[C]//2017 IEEE 3rd Information Technology and Mechatronics Engineering Conference (ITOEC). Chongqing:IEEE,2017:318-323.
[15]Dong Z Z,Wang H,Tang Y W,et al. Research on automatic driving system of agricultural machinery based on embedded[C]//2019 IEEE 3rd Information Technology,Networking,Electronic and Automation Control Conference (ITNEC). Chengdu:IEEE,2019:1940-1943.
[16]何 杰,朱金光,罗锡文,等. 电动方向盘插秧机转向控制系统设计[J]. 农业工程学报,2019,35(6):10-17.
[17]王大鹿. 数值迭代算法下的智能插秧机插秧路径規划[J]. 农机化研究,2020,42(11):197-200,205.
[18]Liu K,Cheng G H,Kong Z G. Beidou agricultural machinery automatic driving software design[C]//2019 IEEE 4th Advanced Information Technology,Electronic and Automation Control Conference (IAEAC). Chengdu:IEEE,2019:1770-1775.
[19]奚小波,史扬杰,单 翔,等. 基于Bezier曲线优化的农机自动驾驶避障控制方法[J]. 农业工程学报,2019,35(19):82-88.
[20]史扬杰,奚小波,吴 飞,等. 电机式北斗农机自动驾驶系统设计与试验[J]. 东北农业大学学报,2019,50(4):88-96.
[21]唐天石. 浅谈液压和电动两种农机自动驾驶的方式[J]. 农业工程技术,2019,39(36):70-72.
[22]李世超,曹如月,季宇寒,等. 基于不同电机的拖拉机自动导航转向控制系统性能对比[J]. 农业机械学报,2019,50(增刊1):40-49.
[23]芦海涛,张居同. 农机导航自动驾驶系统的组成和分析[J]. 农业工程技术,2019,39(36):67-69.
[24]Morales J,Martínez J L,Martínez M A,et al. Pure-pursuit reactive path tracking for nonholonomic mobile robots with a 2D laser scanner[J]. EURASIP Journal on Advances in Signal Processing,2009(1):935237.
[25]韩 冰,陈 军. 拖拉机行驶路径的多项式设计[J]. 农机化研究,2006(10):98-99,106.
[26]陈秀莲. 拖拉机无人自动驾驶技术应用[J]. 山东农机化,2020(5):44-45.
