用于土壤机械组成测定的自动搅拌装置系统设计
2021-09-24周团坤姚谷敏
周团坤,张 尼,张 莹,姚谷敏
(西安西北有色地质研究院有限公司,西安710054)
自然土壤的矿物质都是由大小不同的土粒组成的,各个粒级在土壤中所占的相对比例或质量分数,称为土壤机械组成,也成为土壤质地。土壤机械组成不仅是土壤分类的重要诊断指标,也是影响土壤水、肥、气、热状况,物质迁移转化及土壤退化过程研究的重要因素,还是土壤地理研究、与农业相关的土壤改良、土建工程和区域水分循环过程等研究的重要内容[1]。
土壤机械组成的测定方法主要有筛分法、沉降法以及激光法等[2],其中激光法是一种比较新的方法,通过光的Fraunhofer 衍射和Mie 散射理论,采用激光粒度仪测定土壤样品中各粒级颗粒体积的百分含量,相较于筛分法与沉降法,激光法有测量快速、测定范围广、相对误差小等优势,但是,激光法在测定黏粒含量较高的土壤样品时偏差较大[3-5]。
目前,国内土壤机械组成测定标准方法中,均采用筛分法和沉降法。环保部标准测定方法是将通过2 mm 筛孔的风干土样制成悬浊液,粒级大于0.063 mm的颗粒由一定孔径的筛子筛分,小于0.063 mm 的颗粒依据斯托克斯定律,采用吸管法或者密度计(比重计)法测定,根据各粒级质量计算其百分含量[6]。在测定前,需要将制成的悬浊液充分搅拌分散,目前常用的是人工搅拌方式,使用搅拌器垂直搅拌悬浊液1 min,上下各30 次。但是采用人工搅拌方式,操作人员搅拌时的次数、力度、行程等难以统一控制,从而造成样品搅拌分散效果不一致,且在大批量样品测定时,劳动强度大,检测效率低。基于此,本文提出了一种自动搅拌装置,代替人工搅拌方式,避免人工操作引入的误差,改善土壤样品搅拌分散效果的一致性,从而提高土壤机械组成测定结果的准确度与精密度。
1 系统总体方案设计
自动搅拌装置是机电一体化产品,主要由人机交互界面、控制系统、传动系统、定位系统、搅拌组件等组成,系统结构如图1所示,自动搅拌装置结构如图2所示。
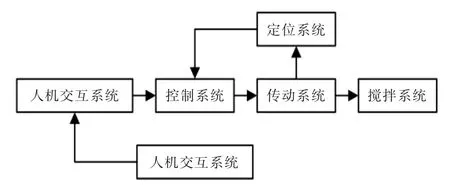
图1 系统框图Fig.1 System block diagram

图2 自动搅拌装置结构Fig.2 Structure of automatic stirring device
2 系统组件
2.1 人机交互系统
在自动搅拌装置中,采用触控屏作为人机交互系统上位机,通过ModBus 通信协议与控制系统进行通信。在搅拌开始前,可以设定各项搅拌参数,如搅拌次数、搅拌频率等。在搅拌过程中,可以显示当前的搅拌状态。并且可以实时显示当前环境温度数据,便于实验人员记录,用于实验数据计算。
2.2 控制系统
在自动搅拌装置中,控制系统以STM32F103RC微处理器作为核心控制单元,控制系统设有:1 路步进电机驱动电路、2 路位置传感器触发电路、1 路温度采集电路以及1 路继电器控制电路。控制板实物如图3所示。
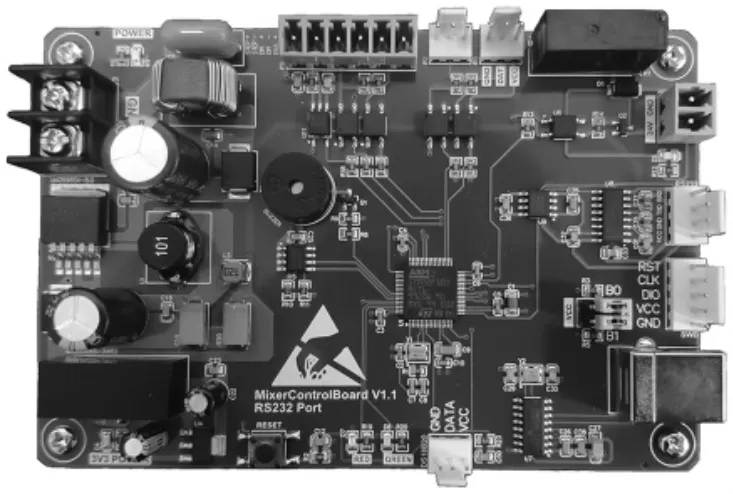
图3 控制板实物图Fig.3 Physical photo of control panel
2.3 传动系统
自动搅拌装置传动系统,采用步进电机驱动方案,由1 台57 型步进电机驱动同步轮系统,并与直线导轨连接的传动结构设计方案,如图4所示。

图4 传动系统Fig.4 Transmission system
目前,国内常用的关于土壤机械组成测定的现行标准,有农业标准《土壤检测 第3 部分:土壤机械组成的测定》、林业标准《森林土壤颗粒组成(机械组成)的测定》、环境标准《土壤粒度的测定 吸管法和密度计法》 以及土工标准 《土工实验方法标准》,在以上标准中一般使用1000 mL 无塞量筒作为土壤样品悬液的沉降筒。经查阅量筒推荐标准,目前1000 mL 无塞量筒,最高尺寸为430 mm[7],从市场上购买的10 余种1000 mL 无塞量筒统计数据来看,最高尺寸为450 mm,基于以上条件,自动搅拌装置中,传动系统最大搅拌行程设计为450 mm,以匹配1000 mL 无塞量筒的尺寸。样品搅拌时,可以根据沉降筒尺寸,通过触控屏设置搅拌行程,以达到最佳的搅拌分散效果。
2.4 搅拌组件
显然地,搅拌组件的设计关系到最终的样品悬浊液搅拌效果,在自动搅拌装置中,搅拌组件包括搅拌片、搅拌杆以及弹性组件。
2.4.1 搅拌片
根据目前国内相关行业标准及市售手动搅拌装置,在本文自动搅拌装置中搅拌片整体采用圆盘结构,盘面上分布若干数量的筛孔,搅拌片示意图如图5所示。
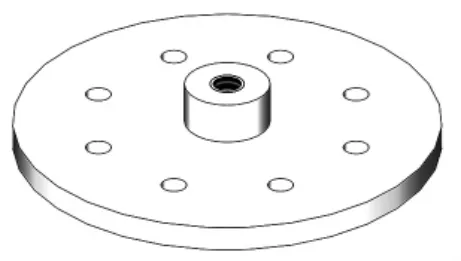
图5 搅拌片示意图Fig.5 Schematic diagram of stirring sheet
搅拌时,通过上下提拉搅拌片来搅拌土壤样品悬浊液,显然,搅拌片的圆盘直径、筛孔大小、筛孔分布都会影响最终的搅拌效果。在自动搅拌装置的研究过程中,根据1000 mL 量筒的尺寸,我们设计了多种规格搅拌片,如表1所示。搅拌片材质选用聚四氟乙烯,耐酸碱腐蚀,不会影响土壤机械组成测定的结果,各搅拌片对于搅拌效果见实验章节。
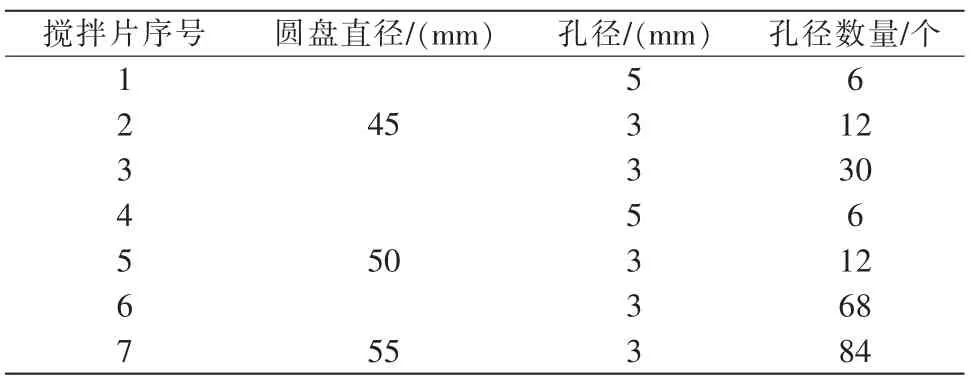
表1 搅拌片规格Tab.1 Specification of agitating sheet
2.4.2 弹性组件
在样品测定中,经过前处理制备的样品悬浊液,在重力作用下,放置的时间不同,会在沉降筒底部形成不同厚度的沉淀层。固定行程的搅拌方式难以将沉降筒底部的沉淀层充分搅拌起来,这将直接影响到土壤机械组成的测定结果。基于此,在自动搅拌装置中,采用了弹性组件,如图6所示。
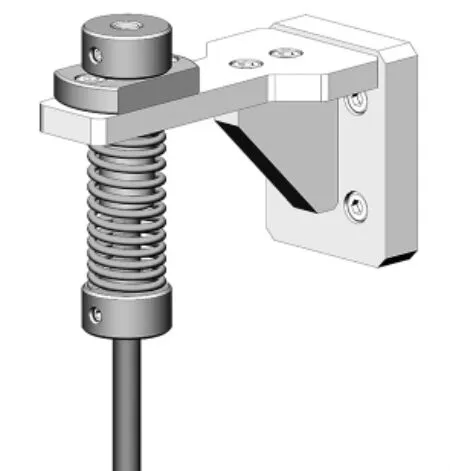
图6 弹性组件Fig.6 Elastic components
弹性组件的工作原理是当搅拌片接触沉降筒底部以后,传动系统带动搅拌器继续向下运行,直到将弹簧压缩至设定的压缩量,然后再向上搅拌,如此反复搅拌30 次。以此来保证将沉降筒底部可能存在的沉淀层充分搅拌分散起来,保证样品搅拌分散效果的一致性。
2.5 定位组件
定位组件包括上、下两个光电传感器。上传感器主要实现搅拌杆初始位置定位,保证每次搅拌时,搅拌行程的一致性;下传感器实现对搅拌杆位置的限制,防止搅拌杆超出设定搅拌范围。在自动搅拌装置中,定位组件如图7所示。
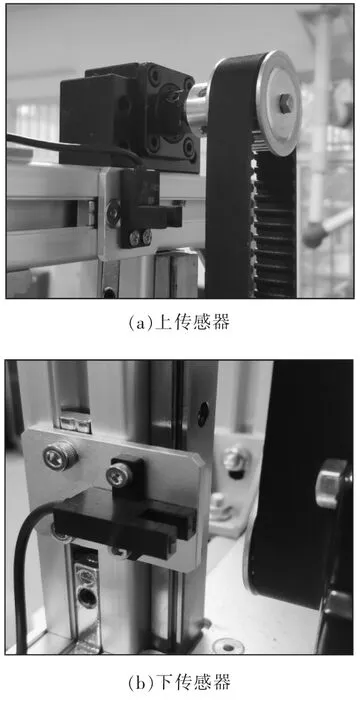
图7 定位组件Fig.7 Positioning components
2.6 温度传感器
在目前国内土壤机械组成测定的相关标准中,沉降法测定原理是斯托克斯定律,在不同的温度条件下会引入不同的计算系数。因此,在自动搅拌装置中设计了基于DS18B20 温度传感器。采用的DS18B20 数字温度传感器,具有体积小,硬件开销低,抗干扰能力强,精度高等特点。
3 实验
3.1 搅拌片测试
使用了3 个土壤样品,按照环保部关于土壤机械组成的标准测定方法,对比不同搅拌片的搅拌效果,密度计读数如表2所示。
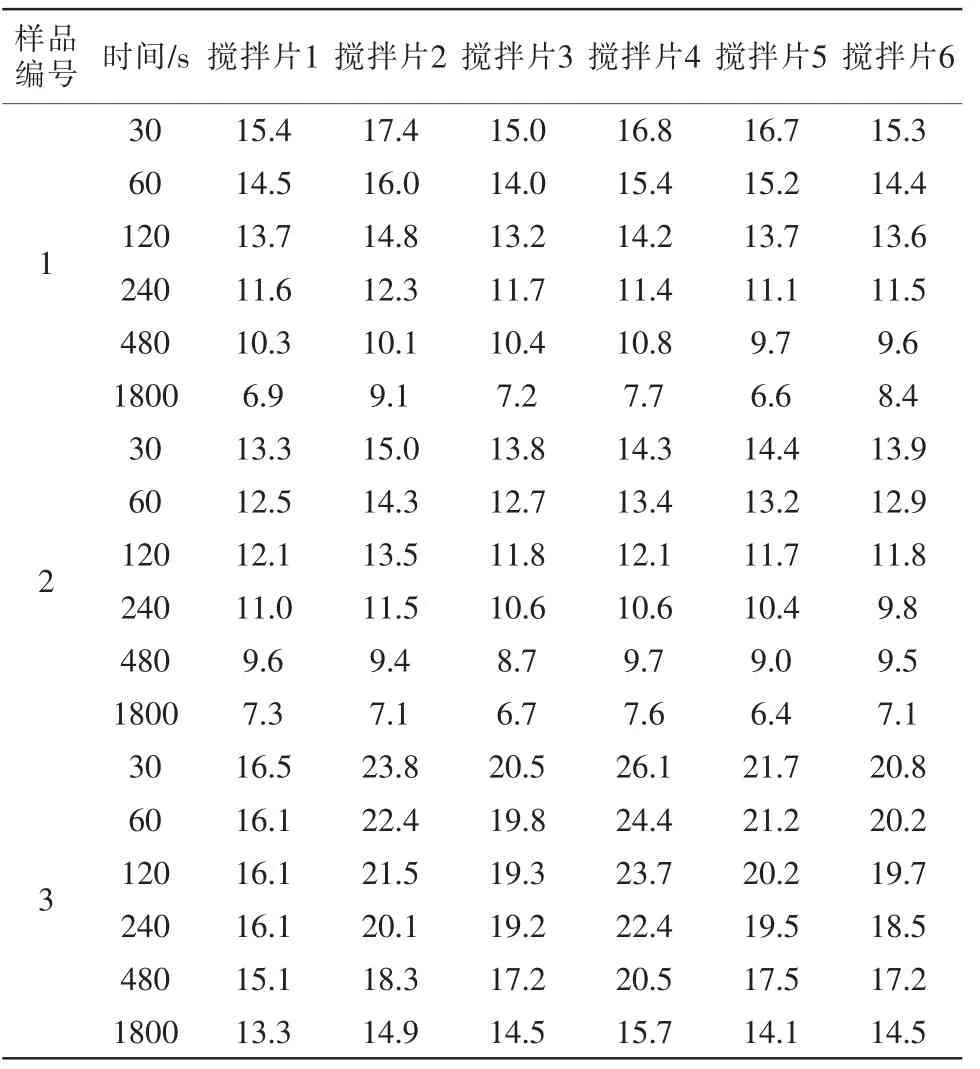
表2 不同搅拌片的效果对比Tab.2 Comparison of effects of different stirring tablets(%)
实验过程中发现,搅拌片直径太小会使得有效搅拌面积减小,导致搅拌不充分,搅拌片直径太大容易在上下提拉搅拌过程中触碰沉降筒内壁。搅拌片上孔数少,容易导致搅拌时液体飞溅,且搅拌完成后,液面起伏较大,不利于密度计快速读数。7 号搅拌片由于搅拌过程中触碰沉降筒内壁导致实验失败,没有数据。从实验数据上来看,2 号搅拌片效果最好。
3.2 精密度实验
由于目前还没有关于土壤机械组成的标准物质,无法对自动搅拌方式测定结果的准确度进行评价。因此,采用对比人工搅拌与自动搅拌测定结果的精密度,来评价自动搅拌装置。
按照国内现行最新环保标准密度计法,分别采用人工搅拌与自动搅拌方式,对14 个土壤样品进行平行3 次测定,测定土壤样品中2~0.6 mm,0.6~0.212 mm,0.212~0.063 mm,0.063~0.002 mm,<0.002 mm 等粒级颗粒百分含量,计算各粒级质量百分含量的平均值、标准偏差、相对标准偏差以及极差,来进行精密度验证实验。
采用人工搅拌方式,测定土壤样品中各粒级颗粒质量百分含量平均值、标准偏差、相对标准偏差以及极差,结果见表3;自动搅拌装置测定结果见表4;人工搅拌方式与自动搅拌方式测定统计结果见表5。实验结果表明,采用自动搅拌方式,测定结果中各粒级土壤颗粒质量含量百分比平均值、标准偏差、相对标准偏差、极差,均优于人工方式测定结果,自动搅拌方式精密度优于人工搅拌方式。

表3 人工搅拌方式测定数据Tab.3 Manual stirring method measurement data(%)

表4 自动搅拌方式测定数据Tab.4 Automatic stirring method measurement data(%)
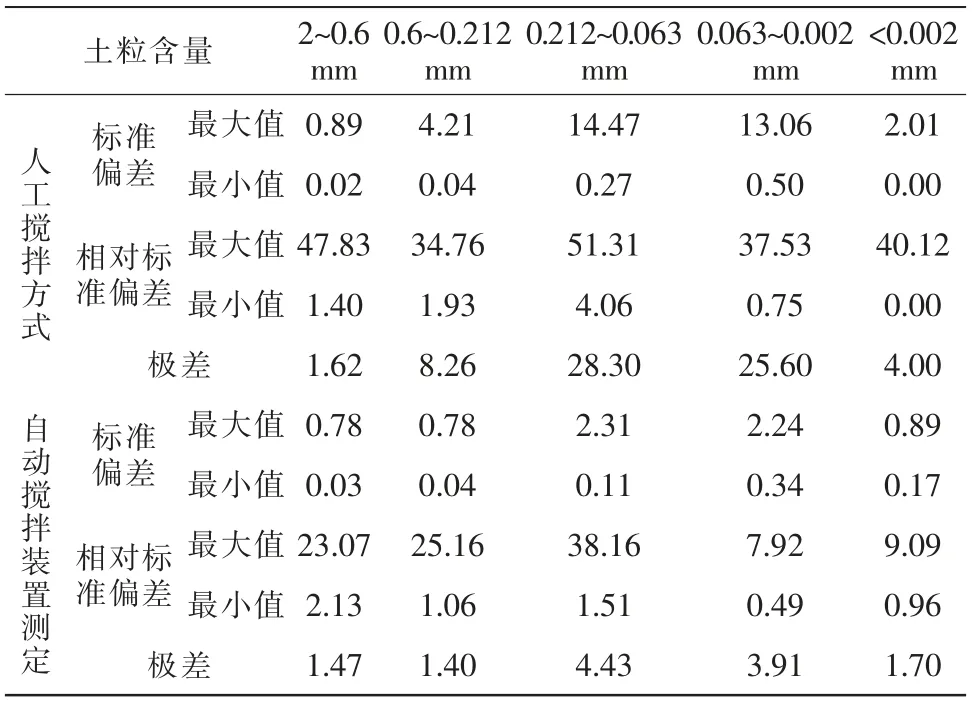
表5 人工搅拌与自动搅拌测定结果统计Tab.5 Manual stirring and automatic stirring measurement result statistics(%)
4 结语
本文根据国内现行土壤机械组成测定的标准方法,采用垂直提拉搅拌器的方式,在1 min 内,上下搅拌30 次土壤样品悬浊液,设计了自动搅拌装置,实现对样品悬浊液的搅拌分散,实验结果表明,采用自动搅拌装置对样品悬浊液的搅拌分散效果优于人工搅拌方式,提高了土壤机械组成测定结果的精密度。自动搅拌装置适用于大批量土壤样品的检测分析,能显著降低操作人员的劳动强度,避免了由人工搅拌带引入的人为误差,提高检测分析效率。