一种基于比幅比相的星载告警测向方法
2021-09-22韦北余邢明强王利伟高晓堃
韦北余,邢明强,王 建,王利伟,赵 军,高晓堃,曹 鑫,顾 辉
(1.中国航天科工集团8511研究所,江苏 南京 210007;2.中国人民解放军93734部队,北京 101200)
0 引言
为了应对反卫星武器的威胁,适应复杂电磁环境,迫切需要发展有效的星载宽带雷达告警测向系统。传统的雷达告警系统常采用比幅测向技术[1],广泛应用于机载平台。比幅测向技术,利用2个通道接收信号的幅度对比进行测向,这种方法对接收信号的信噪比比较敏感,其测角精度约为3 d B波束宽度的1/10[2]。对于雷达告警天线单元,由于要求瞬时覆盖的范围较大,其3 d B波束宽度一般为90°,其对应的比幅测角精度为10°左右,这样的测角精度能够满足飞机告警的需求,但对于星载平台,由于作用距离远超机载平台,相同的测角误差导致的定位误差较大,因此,星载雷达告警系统需要采用一种较高测角精度的测角方法。
雷达告警系统主要测向技术为宽带测向原理,目前常用的方法可分为2种:比幅体制、比相体制[3]。比幅体制的方法主要有基于数字多波束比幅和传统双通道比幅方法。其中,数字多波束比幅测向方法采用数字阵列天线,通道数较多,设备量大[4]。比相体制的方法主要为干涉仪测向方法,其测角精度较高,但由于采用多基线提高解模糊能力,天线单元数较多,体积大,设备量较大[5]。星载雷达告警系统作为有效载荷的一部分,由于平台的特殊性,分配给雷达告警系统的功率、尺寸、质量有限,所以需要采用设备量及功耗较小的测向方法。综上,适应星载平台的告警测向方法仍然为传统的双通道比幅测向方法,但需要提高其测角精度。针对以上的问题,综合比幅测向和比相测向的优点,利用比相测向精度高的特点弥补比幅测向精度低的缺陷,本文提出一种基于比幅比相的测角方法。此方法通过比幅测向粗测出信号来波方向,利用比幅测角结果解比相干涉测向的相位模糊,通过长基线干涉测向提高系统测向精度。此外,本文对该方法的测角精度进行了分析,通过仿真验证了方法的可行性,并仿真分析了此方法的测角精度。
1 比幅比相测向原理
1.1 比幅测向原理
比幅测向利用2天线接收到的信号幅度值之比进行测角,原理图如图1所示,采用2个彼此部分重叠的天线波束,在不考虑天线波束副瓣的影响条件下,2天线张角为θa,信号从偏离2波束等信号轴φs角度入射,对于2个天线方向图,信号从不同的角度入射,2路接收通道信号幅度存在差异,信号入射角度偏离等信号轴越远,2通道幅度差异越大,因此,通过比较2路信号幅度可以判断目标偏离角度,实现对目标信号的测向[1−5]。
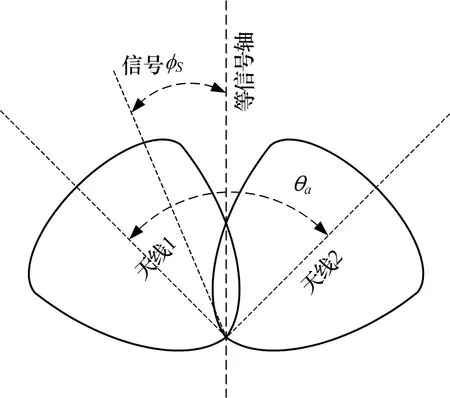
图1 比幅测向原理图
在一维测向的条件下,假设天线方向图函数为F(θ),通道幅度响应为A c(t),入射信号幅度A s(t),入射角度φs,则2通道输出信号为:

式中,A c1、A c2分别为通道1、通道2的幅度响应。
则2通道接收信号的幅度比为:

对于同一时刻,用分贝(d B)表示2通道幅度比为:
假设2接收通道幅度响应相同,即A c1(t)=A c2(t),则:

此处F(θa/2−φs)、F(θa/2+φs)为取对数后的分贝值。由于F(θ)在[−θa,θa]范围内具有单调性,所以2通道比值与信号入射角具有一一对应关系。
假设天线方向图为高斯函数,即F(θ)=e−kθ2,假设其半功率波束宽度为θb,根据半功率波束宽度定义,即F(θb/2)=2−1/2,可得:

代入式(4),得到的2通道幅度比值为:

可以看到,2通道幅度比值与信号入射角一一对应,只要知道2通道幅度比,便可获知信号来波方向。
1.2 比相测向原理
比相测向利用多个天线所接收回波信号之间的相位差进行测角[7-8],比相测向原理图如图2所示。
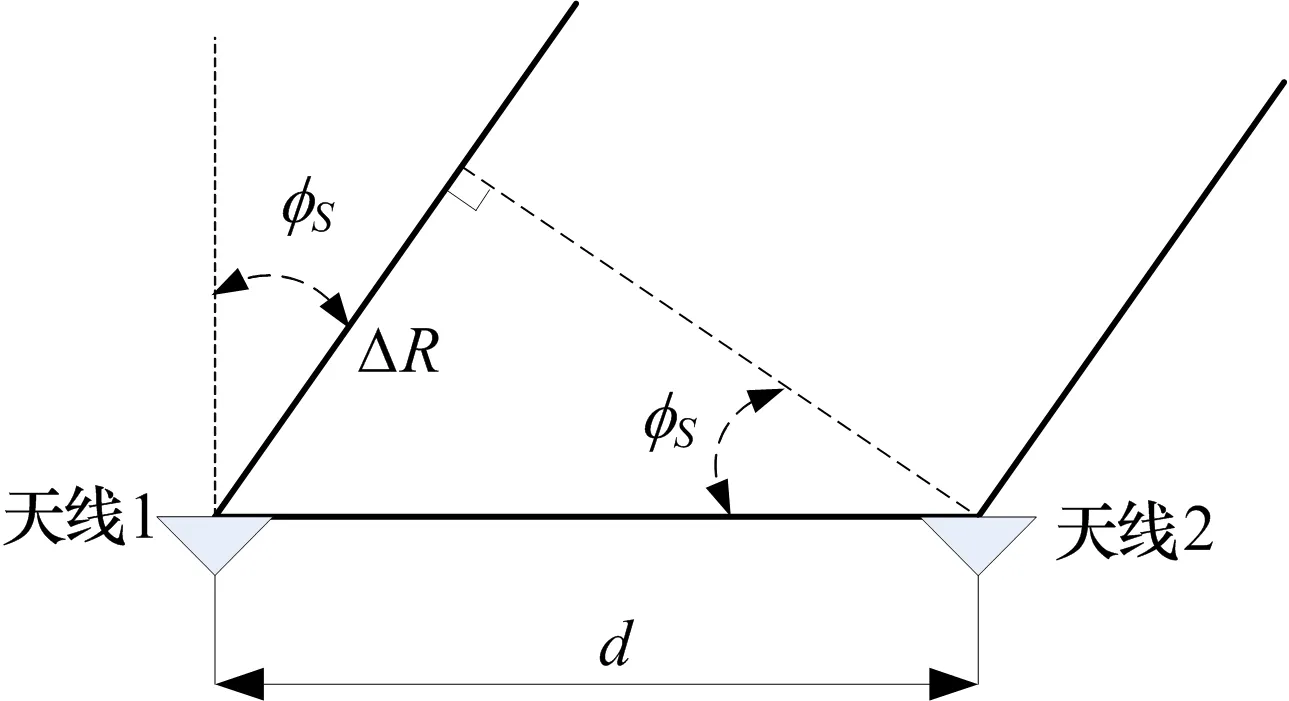
图2 比相测向原理图
在远场平面波的假设条件下,由于天线间存在间距d,信号到达2个天线时间不同,由波程差ΔR产生的相位差为φ,由图2可知:

式中,λ为辐射源的波长。如果能够测得φ,则可确定信号来波方向φs。
1.3 比幅比相测向
比幅比相测向方法综合比幅及比相测向方法,先利用比幅测向粗测出信号入射角度,再利用比相测向精测量信号入射角。此方法需要根据比幅测角的精度进行设置,因此,要设定比幅比相天线阵列布置,必须先研究比幅测向及比相测向的测角精度。
对于比幅测向,根据式(6),可得:

对式(8)中θa、θb、R12求全微分,得到:
式中,Δφs为角度测角误差;Δθa为2波束张角;Δθb为天线波束3 dB宽度;ΔR12为通道幅度比误差。可以看出:波束半功率波束宽度θb越小,即波束越窄,测角误差越小;2波束张角θa越大,测角误差越小;2通道比幅值越小,即信号入射方向越靠近等信号轴,测角误差越小;θa、θb、R12的变化对测角误差都有影响。以上比幅精度的推导未考虑天线波束副瓣的存在,天线主波束变窄的同时,天线波束副瓣必然升高,若信号从副瓣进入,信号入射方向与通道幅度比值成非单调关系,将影响比幅测向结果,导致不可测向,因此,天线主波束宽度不可无限小,同理,2波束张角也能过大。所以,波束宽度和波束张角的变化,不能破坏通道幅度比值与信号入射方向的单调性,否则将导致测向模糊。
对于固定天线阵,同一频率信号,其波束宽度及波束指向皆固定,则测角误差可表示为:

式中,k=θb/θa,为常数。θa、θb、R123个误差因素中,Δθa、Δθb属于静态误差,工程实现中可以通过校表等方法校正;ΔR12为动态误差,即通道幅度响应随工作环境变化,无法提前校正。从式(10)最后1项可以看出:在等信号轴处R12=0 d B,波束宽度及张角对比幅测角误差影响最小,在波束指向方向R12最大,波束宽度及张角对测角误差影响最大;通道幅度比误差对测向误差的影响程度,主要由波束宽度决定,波束越窄,测角误差对通道幅度比值的误差敏感度越小,测向精度越高。
对于比相测向,对式(7)进行微分,可得测向误差的表达式,为:

式中,Δφs为角度测量误差;Δφ为2通道相位差鉴相误差;Δd为基线长度测量误差;Δλ为由测频误差导致的波长测量误差。Δφ、Δd、Δλ3个测量误差中,Δd为静态误差,工程实现中可在设备工作前测量校正;Δφ、Δλ为动态误差,无法提前校正。
对于波长测量误差导致的测向误差Δφλ,可表示为:

假设测频误差为Δf,则:

式中,f0为信号真实载频;c为光速。所以,Δφλ可进一步表示为:

由于Δf相对于中心频率f0较小,能够达到1%以下,且测量的φs范围通常限制在±π4以内,所以对应的测角误差Δφλ较小,可以忽略,所以角度测量误差则主要由通道间相位差鉴相误差决定,即:

式中,λ、φs由辐射源信号特征决定,d为比相基线长度,由天线布置设定。可以看出,d越大,测角精度越高。但是,d越大,测得的φ越大,当|φ|>π时,通道间相位差测量值将存在相位模糊,必须先解模糊才能测向。
比相测向相位模糊示意图如图3所示,图中φa为测向模糊周期,只有在φa宽度的角度范围内,测量的通道间相位差φ与信号入射角φs一一对应,不存在模糊情况。由式(7)可知,d>λ2时,通道相位差存在相位模糊,λ2对应不模糊入射角范围,d对应180°所有入射角可能性,则φa为:

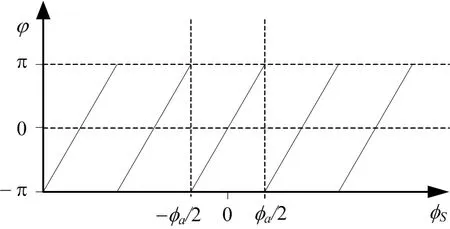
图3 比相测向相位模糊示意图
如果要利用比幅测角方法解比相测角相位模糊,则比幅测向结果必须保证不超过比相测角的模糊范围,才能保证后续比相测角结果的唯一性。假设信号真实入射角为φs0,比幅测角精度为Δφae,比幅比相测向原理如图4所示。
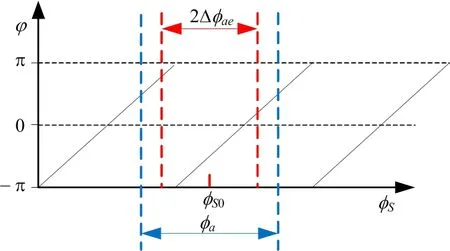
图4 比幅比相测向原理图
从图4中可以看出,利用比幅测角方法解比相测角相位模糊,必须满足2Δφae≤φa条件。根据式(10),忽略静态误差因素,则:

比幅比相测向可解模糊的基线长度条件为:

假设系统设计要求的测角精度为Δφs0,根据式(15),可得天线基线长度d为:

综合式(18)和式(19),可得比幅比相测向方法天线基线长度d限制范围为:

对于宽带雷达侦测系统,其工作频段较宽,对应的波长变化较大,最长、最短波长比可达3倍以上,假设接收信号波长变化范围为[λmin,λmax],由于式(20)的条件为针对单个频点的限制,对于整个系统,为保证测向精度,其最短工作基线应该选择最大值,同理,为保证比相测向可解模糊,最长工作基线应选择最小值,所以比幅比相测向方法天线基线长度d限制范围可修改为:

综上,比幅比相测向系统基线设计步骤如下:
1)根据工作频段要求的测角精度及接收信号的最长波长计算最短基线长度要求;
2)根据接收信号的最短波长、比幅测角精度计算最长基线限制;
3)比较最长最短基线要求,如果两者相矛盾,即最长基线小于最短基线,则此工作波段宽度条件下,无法采用单基线比幅比相测角,需修改工作频段宽度,或采用双基线、多基线方案。
1.4 二维比幅比相测向
前文的测向为一维测向,星载雷达告警系统需要测定辐射源的空间二维角度信息,需要进行二维测向。
星载雷达告警测向示意图如图5所示,辐射源位于卫星的可视区域,需要测定的辐射源角度信息为(α1,β1),其中,α1为方位角,β1为俯仰角。实际实现中常采用柱体坐标系来定义辐射源的方位角与俯仰角,其与卫星载体坐标系的关系如图6所示,此时的辐射源方位及俯仰角为(α,β)。

图5 星载雷达告警测向示意图
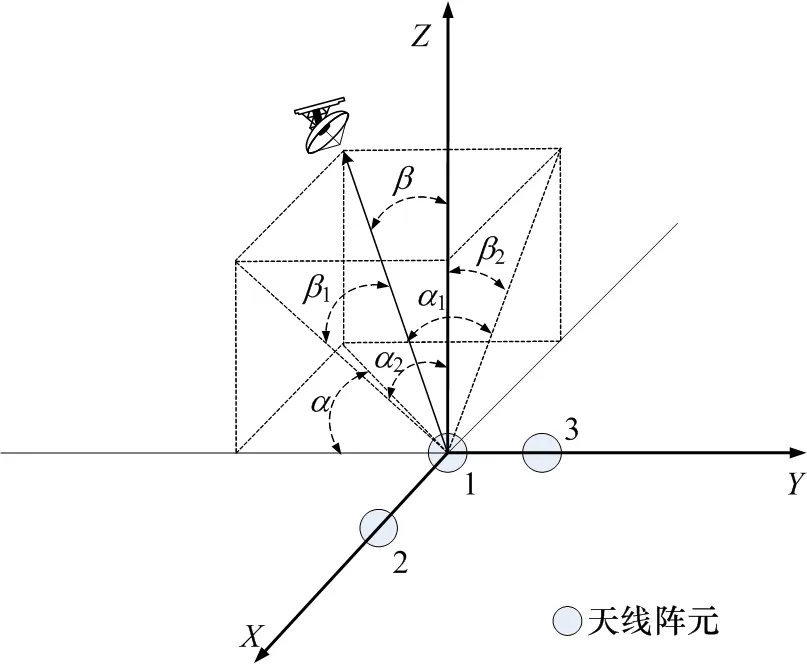
图6 柱体坐下系比幅比相二维测向示意图
为减少设备量及通道数,本系统采用三阵元天线阵。三阵元天线方向图相同,但波束指向不同,以Z轴为中心轴,在空间中均匀分布,如图7所示。天线1、天线2、天线3波束方位角α分别为225°、0°、90°,3个波束指向与Z轴夹角相同,即波束指向的俯仰角β相同,此时天线2、天线3相对于天线1的几何关系是等价的,即若天线方向图在三维空间内关于波束中心线完全对称,则此天线阵在X轴、Y轴方向的测角能力相等。
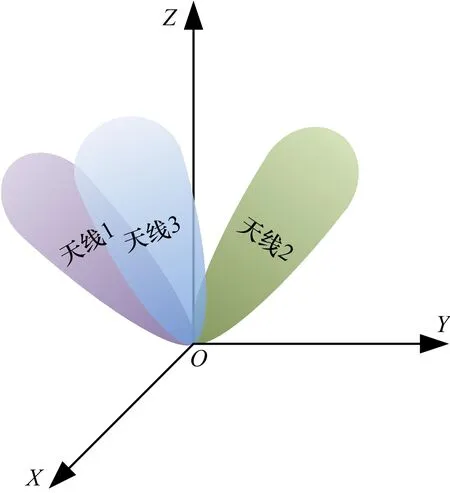
图7 波束指向示意图
在图7的天线波束指向的条件下,波束沿XOZ面的剖面如图8所示。与一维测向的情况不同,此时天线3与天线1、天线2的波束并不对称,天线波束在空间上存在交叠。
图8 三波束剖面示意图
由于天线增益、波束指向已知,所以波束幅度增益差固定,因此,仍然可以采用比幅方法进行测向。3个天线波束,可以组成3组比幅测角天线对,即每2个天线可以得到一组天线幅度增益差ΔF,将某一方向的3 个 幅 度 差 组 成 向 量X(α,β),X(α,β)=[ΔF12;ΔF13;ΔF23],其中,ΔF12为天线1与天线2的天线幅度增益差,同理,可得到ΔF13、ΔF23。3个幅度差变量中,ΔF12、ΔF13是相互独立的不相关变量,由于天线交叠区域内天线间的幅度差具有单调性,所以辐射源角度与3通道幅度差向量一一对应,假设测定的3个通道间相位差为Y,可以通过Y与X的相关系数来判断辐射源的角度,相关系数最大的向量X对应的角度就是辐射源的入射角度。假设信号入射角度的空间样本个数为N,则二维比幅测角可表示为:

在某一角度上,由于二维比幅测角相对于一维测角多了1个独立变量,其测角鲁棒性更强,即测角误差对通道间幅度误差敏感度较一维比幅测角低。
通过比幅测向得到目标入射角度的粗测结果,可以确定方位角度搜索范围,进一步通过比相测角,得到高精度的测角结果。
对于本系统的三阵元的二维比相测角,其测角过程与一维比相测角不同。在一维比相测角中,2个天线波束的指向相同,在入射信号为平面波的假设下,信号从2个天线波束的同一角度入射,所以每个天线波束的相位对于信号的影响相同,在测量通道间相位差的时候,能够消除天线相位对信号相位的影响,仅剩余由天线基线导致的通道间相位差。而本系统的比相二维测向中,3个天线波束指向不同,接收信号时,同一信号从天线波束的不同角度入射,造成同一信号在每个通道叠加了不同的相位信息,通道间取相位差时,无法去除天线方向图相位特性对信号相位的影响,所以同一信号通道间相位差包含了由天线基线产生的相位和2个通道对应天线方向图相位的差,因此,无法简单地通过式(7)计算辐射源的入射角度。
对于一定方向入射的信号,其对应的天线波束相位差固定,且由波程差导致的相位同样固定,因此,参照比幅测向方法,可以建立信号入射相位表,即对空间入射角度的所有可能性建立通道相位差查找表,但是由于比相测向的特殊性,与比幅测向不同,其相位差在整个测角空域范围内并非单调,存在相位模糊现象,这主要由天线基线过长所造成的,因此,比相测向前需要通过比幅测向粗测出信号波方向,然后在比相测向的一个模糊方位内进行搜索,确定辐射源角度信息。
不同于一维测向的相位模糊周期,3阵元模糊周期较长,这是由于3组通道间相位差的组合造成的,二维比幅比相相位模糊示意图如图9所示。
图9 二维比幅比相相位模糊示意图
3阵元天线系统中,存在3组阵元组合,即存在3条测向基线,同一信号从不同空间角度入射,3条基线的模糊周期不同,组合后如图9所示。3组相位差有各自的模糊周期,二维比相测角同时利用3组相位差进行测角,即使某一组或2组存在相位模糊,只要其中一组在整个搜索区间内单调,与角度一一对应,即可确定来波方向,完成测角。所以,二维比相测角的模糊周期为3组相位差模糊周期的最大值。
如前文所述,二维比相中,除基线导致的通道间相位差,还存在从天线波束不同方向入射导致的相位差,因此,实际的周期结果与图9有差异,不同角度位置对应的通道间相位差会包含不同的波束相位差,导致各通道相位差周期性产生变化,甚至失去周期性。但是,由于采用3通道相位差测向,只要3组相位差在搜索区间内存在一组与角度一对一的相位差,即可完成二维比相测向。
综上,对于二维比幅比相,式(21)中基线长度d除遵循一维比幅比相测角的限制外,还需要根据实际天线增益、指向及布阵情况进行合理的调整。
2 仿真分析
2.1 仿真模型
仿真系统采用3阵元“L”型布局,天线阵布局几何模型如图6所示。3个阵元完全相同,天线的工作波段为2~6 GHz,波束宽度90°,在柱体坐标系下,3个天线的波束指向的方位分别为225°、0°、90°,俯仰角为40°,其空间位置如图6和图7所示。假设通道间相位误差15°,通道间幅度误差1 dB,根据式(21)计算,得到0.08 m≤d≤0.57 m,根据实际情况设定的天线1与天线2、天线3的间距为0.14 m。
选取2 GHz、4 GHz、6 GHz 3个频点进行仿真实验,并将天线波束的方位角及俯仰角变换到卫星载体坐标系下,即从(α,β)坐标变换为(α1,β1),3个频点对应的天线方向图幅度图如图10所示,天线方向图的相位如图11所示。
对比图10中的3幅图,可以发现,高频点的波束宽度较低频点窄,即θb较小,高频点的波束主瓣增益比低频点的高,侦测系统天线的瞬时覆盖范围由高频点的波束宽度θb决定,天线波束宽度及增益的变化,会影响比幅测向的精度。

图10 天线方向图幅度增益图
从图11中可以看出,3个频点的天线方向图相位自身存在相位模糊现象,6 GHz的天线波束相位模糊情况最为严重。由于3个波束指向不同,这种相位模糊导致同一空间角度不同通道间的相位差复杂化,这种模糊不利于后续的比相测角。
图11 天线方向图相位图
以4 GHz频点波束方向图为例进行进一步仿真分析。按照设定的波束指向,将同一波束进行旋转变换,得到3个指向不同的波束,3天线波束幅度增益空间叠加图如图12所示,相位叠加图如图13所示。
从图12可以看出,3个波束在空间交叉叠加,在同一空间角度,3个波束对应的幅度增益不同,利用这种增益差异,能够实现二维测向。
图12 天线方向图幅度叠加图
如图13所示,由于3个天线波束相位本身存在相位模糊现象,3个波束相位图交叠后较为复杂,但同时可以发现,同一空间角度对应的3个波束的相位不同,利用这种相位差异能够实现比相测向。
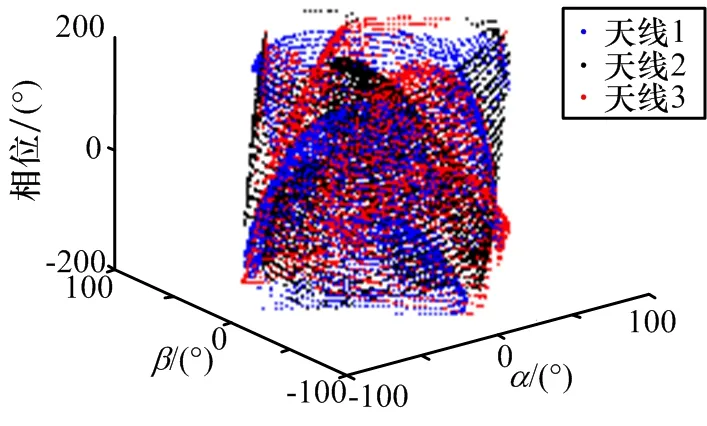
图13 天线方向图相位叠加图
根据同一空间角度对应的幅度增益值,分别求天线1、天线2、天线3波束之间的幅度增益差,得到的结果如图14所示。
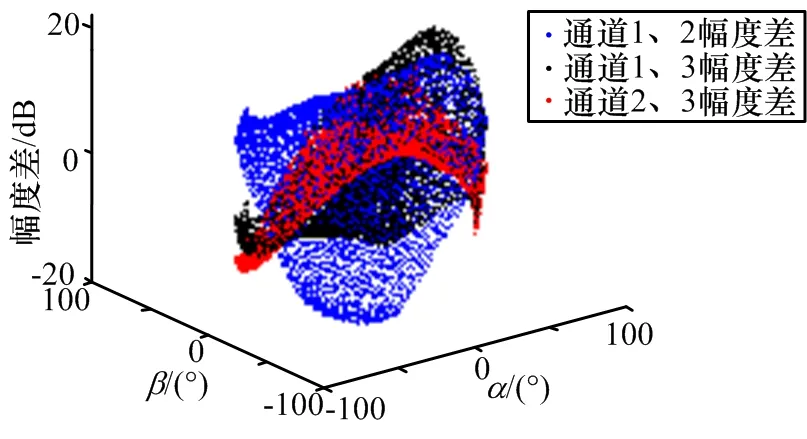
图14 天线方向图幅度差
从图14可以看出,3组幅度增益差在空间内较为平滑,无较大波动,即幅度增益差在空间内具有单调性,3组幅度增益差的组合与空间角度一一对应,能够用于二维测向。
为更清楚地观测幅度差测向的原理,分别沿俯仰角0°面、方位角0°面对幅度差进行剖面分析,得到的结果如图15所示。
图15中,3个通道间幅度差在整个测角范围[−45°,45°]内具有单调性,与信号角度一一对应,同时可以看到,3个通道间幅度差数值不同,任一角度对应的3个幅度差值具有唯一性,这有利于后续的相关比幅测向处理。
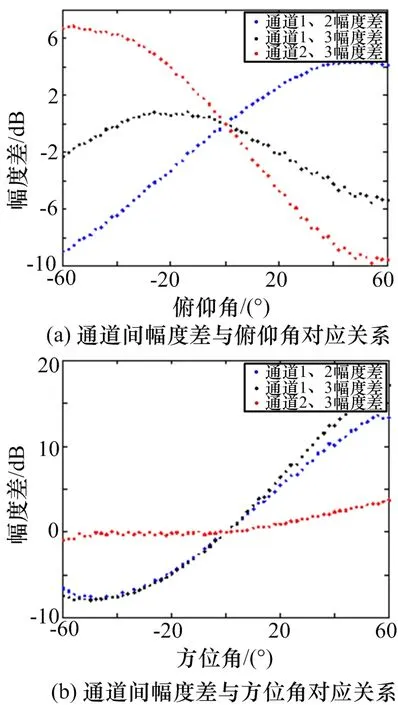
图15 天线方向图幅度差图两维剖面图
与比幅测向类似,根据同一空间角度对应的各天线波束相位,及各天线几何位置导致的相位差,分别求天线1、天线2、天线3对应通道间的相位差,得到的结果如图16所示。
如图16所示,各天线间的相位差较为复杂,但仍呈现模糊特性,需要通过解模糊方法校正。
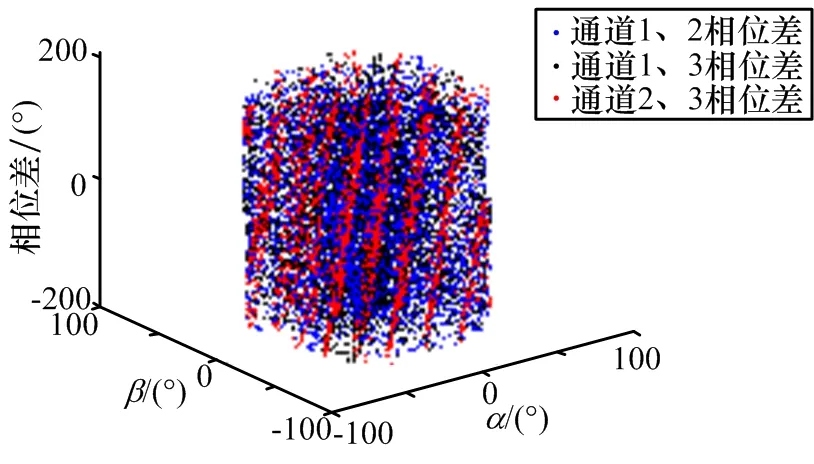
图16 天线方向图幅度差图两维剖面
同样,为更清晰地观测通道间的相位差变化规律,分别沿俯仰角0°面、方位角0°面对通道间相位差图进行剖面分析,得到的结果如图17所示。
从图17可以看出,3组通道间相位差存在一定的周期性,但重复周期不固定,且有变化,这是由于通道间相位不仅包含信号到天线的距离差导致的相位,还包括2个天线波束间的相位差。由于相位差规律性较差,导致最终的相位差无固定周期,只是呈现一定的周期性,但是,从图17中可以看出,在一个重复周期内,至少有2组相位差具有单调性,同一角度对应的3组相位差具有唯一性,因此,此相位差能够用于测向。
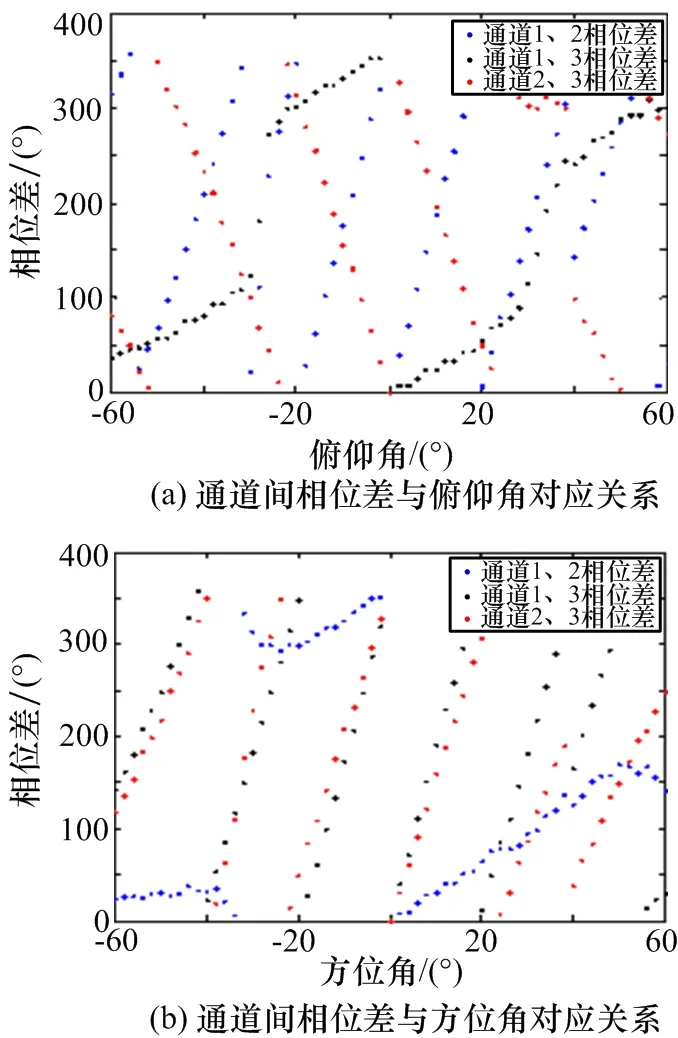
图17 通道间相位差图两维剖面图
2.2 测角误差仿真
根据前文仿真模型,在柱体坐标系下,以10°为间隔在方位维0°~360°范围内设置仿真点,以5°为间隔在俯仰维0°~45°范围内设置仿真点,每个点进行100次蒙特卡罗仿真,仿真不同频率对应的测向误差。以4 GHz频点为例,假设系统通道间相位误差15°,通道间幅度误差1 d B,设置的比相模糊范围为10°,将所有仿真点的所有测角结果按照测角误差从小到大进行排序,得到的二维比幅比相测向误差如图18所示。
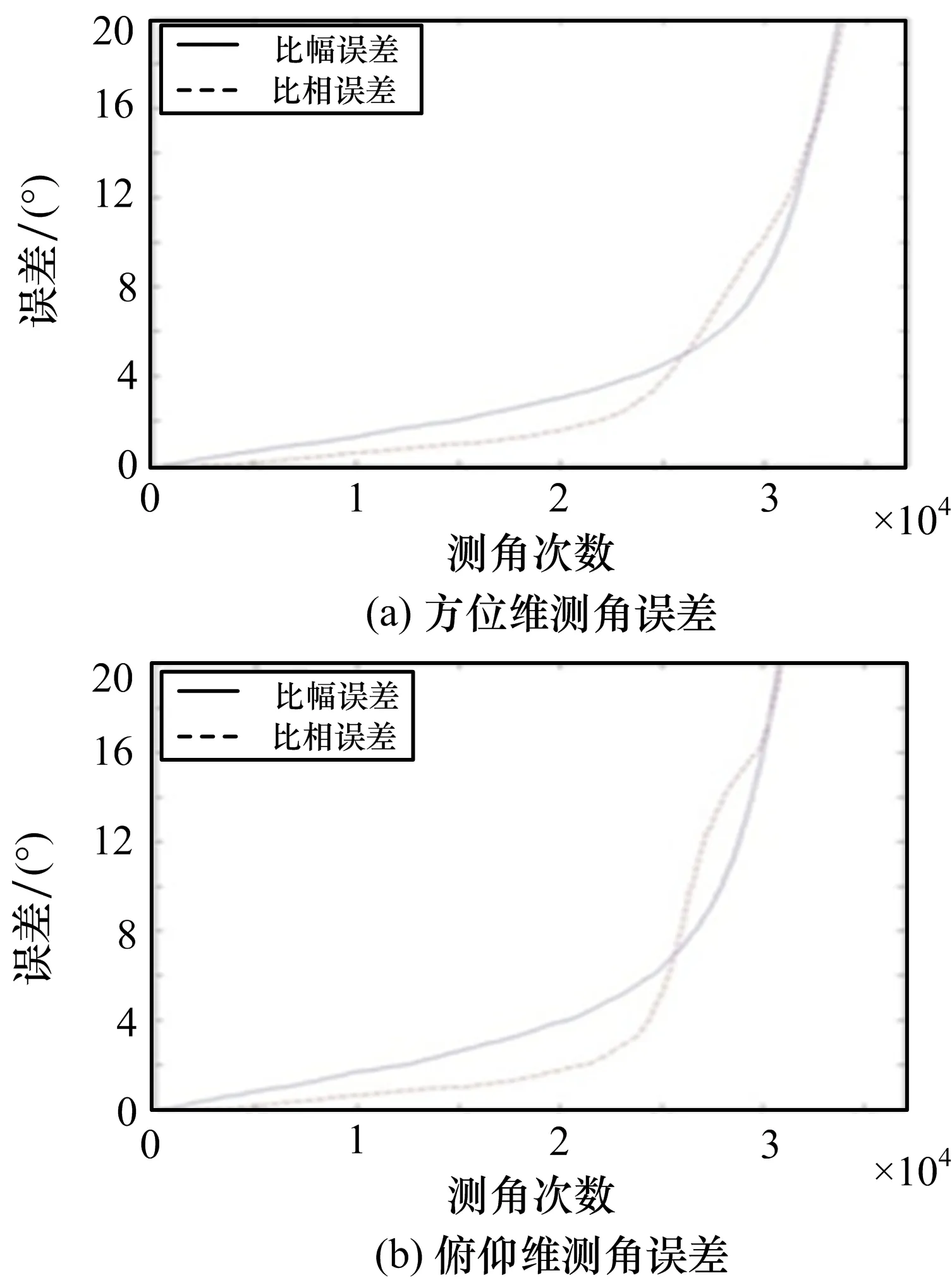
图18 二维比幅比相测向误差图
在图18中,比幅误差曲线为仅采用比幅测角的误差结果,比相误差曲线为采用比幅比相方法测角的误差,可以看到,前半段比幅比相误差明显比比幅误差小,后半段比幅误差与比相误差曲线交叠,这是由于当比幅比相测角是在比幅测角的基础上进行比相测角,需要根据比幅测角结果搜索比相测角结果,搜索范围为一个模糊区间,当比幅测角误差较大时,偏离信号真实方向较大,此时搜索区域不包含真实角度,导致比相测角得到的角度为其模糊角度,测角误差有可能变得更大。图18中比幅误差曲线与比幅比相误差曲线的第一个交叉点基本上为测角误差的方差值,符合正态分布的3σ准则,为第一个σ点。同时可以看出,方位维和俯仰维测角误差曲线稍有不同,这是由天线方向图并非360°完全对称造成的。
为比较各频点测角性能的差异,本文还仿真2 GHz和6 GHz频点的比幅比相测角误差,并同4 GHz频点进行了比较,结果如图19所示。
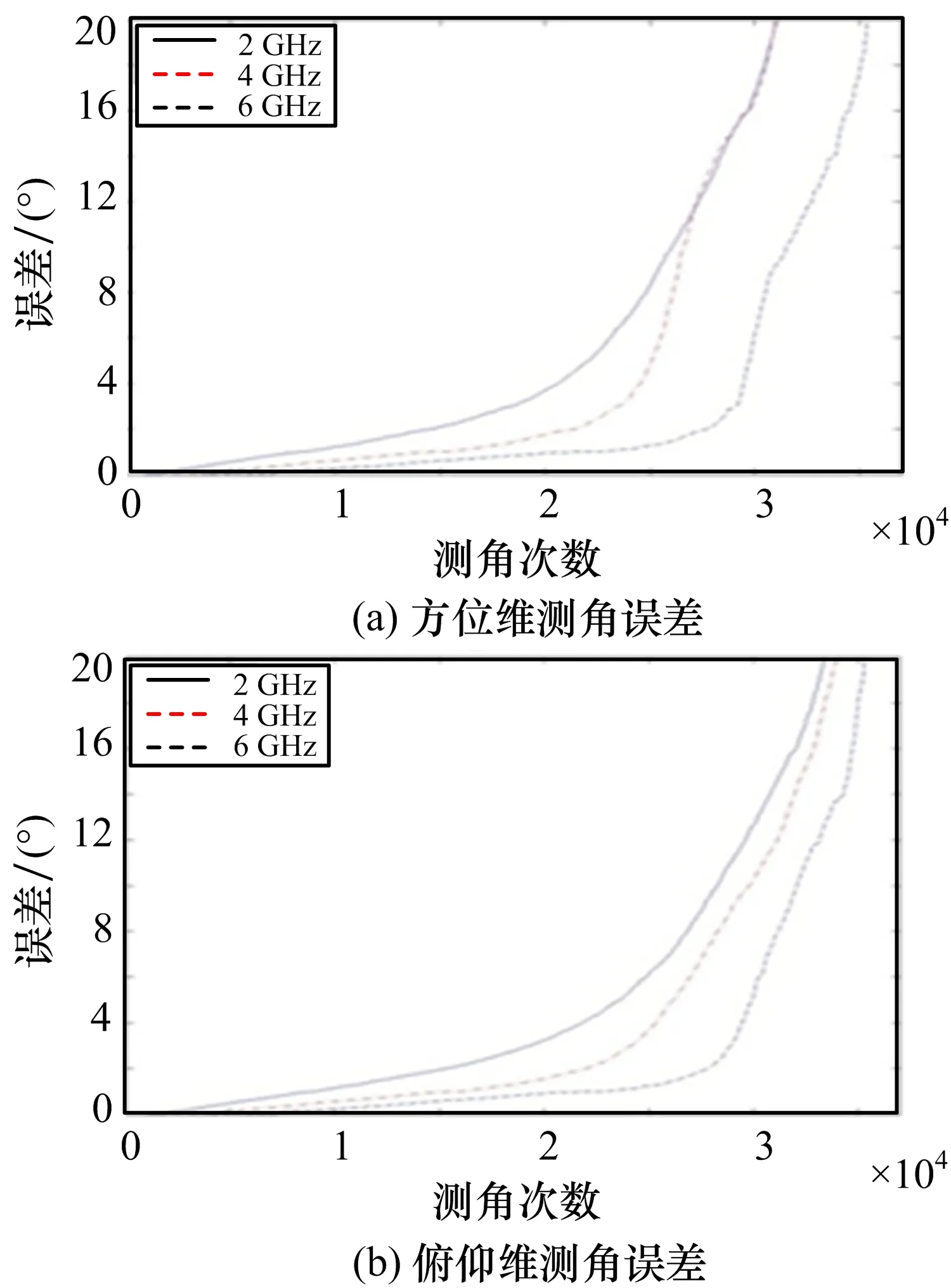
图19 3频点比幅比相测角误差对比图
从图19可以看出,3个频点的测向精度,6 GHz最高,2 GHz最低,这是由于天线在高频点的3 d B波束较窄,有利于比幅测向,所以,其比幅比相测向精度更高。
为研究通道间幅度测量误差对比幅比相测角误差的影响,本节还仿真了不同幅度测量误差条件下的比幅比相测角误差,通道间幅度测量误差为0.3~1.5 d B,仿真结果如图20所示。
从图20可以看出,比幅比相测角误差随幅度误差增大而增大,且增速随幅度误差增大而增大。
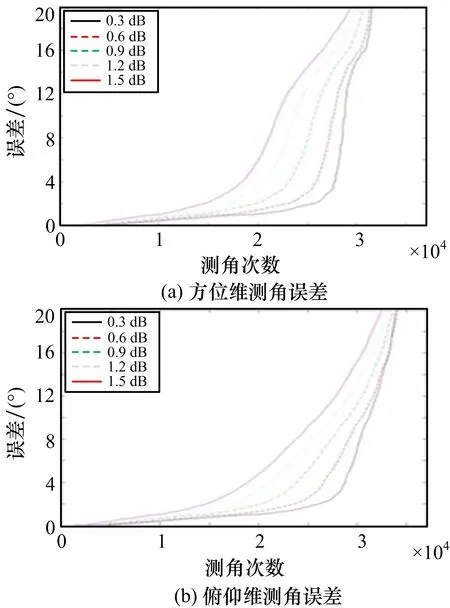
图20 比幅比相测角误差随通道间幅度误差变化曲线
类似的,在通道间幅度测量误差为0.9 d B的条件下,本节仿真分析了通道间相位误差对比幅比相测向误差的影响,通道间相位误差从0°变化到16°,得到的仿真结果如图21所示。

图21 比幅比相测角误差随通道间相位误差变化曲线
如图21所示,比幅比相测角误差随通道间相位误差增大而增大,但与单独的比幅测角结果相比,均有明显的降低,与图20对比,比幅比相测向误差结果随相位变化较为缓慢,说明此方法收相位误差的影响较小,测角误差较为稳定。
3 结束语
本文针对传统雷达告警系统测向精度较低的问题,提出了一种基于比幅比相的星载告警测向方法,分析了二维比幅比相测向原理,建立了仿真模型,仿真分析了二维比幅比相测向性能,并对通道间幅度及相位误差对测向误差的影响进行了仿真分析。仿真结果表明,所提的二维比幅比相方法具有可行性,能够显著提高传统比幅测向的测向精度,增强告警雷达的告警能力。相关技术可应用于多种平台,用于监测和告警威胁,具备广阔的应用前景。■