水上多元救助力量协同调度系统总体研究
2021-09-18金浩张英香王吉武宋煊懿胡敏瑞范壮金晶
金浩 ,张英香,王吉武,宋煊懿,胡敏瑞,范壮,金晶
(1.中国船舶集团有限公司第七一四研究所,北京 100101;2.中国中小企业发展促进中心,北京 100082;3.大连船舶集团有限公司,辽宁 大连 116005;4.山东蓬渤安全环保服务有限公司,山东 烟台 265600)
0 引言
近些年随着国家战略的部署,我国的水上活动越来越频繁,水上突发事件数量较多,且时有发生重特大事故,因此水上多元救助力量技术的需求日益提升。
从“东方之星”轮倾覆、重庆公交坠江等事故救援经验来看,水上突发事件的风险增加,水上多元救助力量技术的需求日益提升。近海水上应急事件时有发生,据不完全统计,我国某河流每年发生水上突发事件高达70 起左右,约5 000 余人遇险。我国的应急救援任务非常繁重,应急指挥和协同调度系统建设非常重要,时间紧迫,任务艰巨,且需要长期性[1]。
水上突发事故不仅容易造成财产损失,严重情况下还会危害群众生命,社会影响极大,有些突发事件持续时间长,危害空间广,处理复杂,需要调动和协调多个有关部门和单位[2]。要有效的处置应对,则必须建立结构化的协同调度系统,才能做到及时防范,快速响应[3]。
近些年来,如何进行突发事件的指挥调度问题在我国引起了广泛关注。相关学者做过很多研究,刘丹等[4]针对我国的国情,运用组织理论,提出了一种应急指挥组织结构,包括各级政府应急部门、现场指挥部和会商小组,并结合三峡防洪应急指挥组织对其进行分析。张强等[5]主要研究了突发事件现场应急指挥系统软件的设计,对比分析美日突发事件应急指挥体系,对武汉应急指挥体系提出了改进建议。吴杰[6]使用链接图法建立救援航行的空间模型,并在建立的模型基础上规划路径,使得搜索时间短、访问节点次数少。
国外从很久之前就已开始研究突发事件如何进行应急指挥。美国有专门的应急指挥系统,它是国家应急系统的核心,能在突发事件发生时使各级组织运行效率变高[7]。但其应急指挥系统也曾受到相关学者的质疑,因此研究应急指挥系统在不同紧急情况下如何应用很有必要[8]。德国的应急指挥系统由政府部门、军队、警察等组成[9]。
水上应急救援任务涉及来自不同部门、拥有不同资源的人员及装备来完成,只有基于“协同”思想才能最大限度地发挥一线救援人员的智慧和主动性[10]。大数据技术、融合视频监控技术、人工智能技术、5G 传输技术等的发展,为我国水上突发事件的应对指挥提供了技术基础。本文聚焦我国水上突发事件应对需求,探讨基于智慧协同救援理念和内容,分析水上多元救助力量协同调度系统的基本概念、能力需求、功能组成和关键技术。
1 水上多元救助力量协同调度系统的概念
水上多元救助力量协同调度系统的作用是在应急响应期间,建立临时机构,以“多元”架构下的智能应急救助为目标,在参照相应的应急管理制度、应急预案要求的基础上,结合救援的实际情况,并且遵从指挥关系和调度原则,对各方面的救助力量进行综合协调,对水上突发事件进行应急处理的活动。
水上多元救助力量协同调度系统是以水上搜救技术为核心,以大数据技术、人工智能技术等为支撑的水上突发事件应急救援指挥系统,作为工具对水上应急预案进发布实施,可以进行日常的应急管理、事故预测、信息交换共享,以及动态生成指挥救援方案,其主要内容包括4 个方面:
1.1 确定水上突发事件类型及性质
水上突发事件通常由于天灾或者人祸等原因导致,可通过2 种形式来发现水上发生突发事件:一是事件现场人员利用事件发生现场的各种救援设备发射求救信号;二是由巡逻船、渔民等第三方报告。无论哪种形式,必须首先获取水上突发事件的基本信息,突发事件发生与否、事件发生的确切坐标位置、突发事件的对象等。
水上突发事件根据原因可分为人为突发事件、自然灾害突发事件和混合突发事件,按照其后果影响大小,从高到低依次分为特大、重大、较大、一般4 级[11]。
1.2 基于大数据技术的应急救援预案生成
在收到水上突发事件已经发生的消息后,必须立刻估计事态会如何发展,通过分析突发事件引起的事故情况、发生地点和原因等相关信息,第一时间形成现场态势图,并基于历史数据库和实时天气、水文、应急救援力量配备等情况形成应急预案,明确救援路线、人员、方法、装备等。
1.3 应急救援智能决策支撑
1)地理空间环境分析。近年来,通信、导航、传感、人工智能等新科技发展迅速,可以对水上突发事件现场的环境信息空间进行搜索分析,具备提取环境的敏感特征参数、分析路径、测算空间距离等功能,促进应急救援决策向智能化发展。
2)战术层次智能任务规划和行动管理。依据水上突发事件应急救援的特点,进行应急准备、水上救助基地规划管理、救助目标与对象分析、应急救援仿真模拟、救援现场监测与预警等。
3)救援行动实时支持。包括救援路径、行动方案优化、实时地理环境分析与目标识别等。
1.4 救援现场的任务协同和调度
水上应急救援行动呈现立体化、多方位的趋势,涉及多救援主体、多类型救援装备、多目标救援场景等,各类型救援人员和救援装备担负起专门的救援任务,从而形成救援协作网络。各主体之间协作的程度将直接影响应急救援的整体效能,制约这些任务执行的条件包括信息交换、任务间依赖性以及施救主体的决策和行为等。平台应为同时开展救援工作的各个参与主体提供动态的施救策略、资源调配和任务节制。调度方案的生成依赖于实时的基础数据采集、施救作业条件监测、各个子任务执行进程、意料之外的阻碍等因素,整个过程形成感知-决策-执行-反馈的闭环。
2 水上多元救助力量协同调度系统的需求分析
2.1 功能性需求分析
2.1.1 能力需求
水上应急救援是在水上发生突发事件时采取的一系列救援行动,需要及时准确地掌握突发事件的情况,掌握事件发生的地点、性质和危害程度,收集到的信息要准确,采取行动的目标明确并且迅速。水上应急救援应具备应急准备能力、实时分析能力、推测示警能力、多元救援力量协同调度指挥能力等。
2.1.2 协同应急组织需求
水上突发事件的发展趋势、严重程度很难根据现实情况预测准确,并且可能会有次生事件发生。由于这些不确定性,需要进行应急救援的组织具有更为复杂化、动态化的特点,才能使应急救援更为高效。
2.1.3 应急联动指挥体系需求
当水上突发事件发生时,应急联动指挥体系能够依据事件发生特点的不同自动匹配应急预案,提供相应的应急措施,做好资源分配。
2.1.4 数字化预案管理体系需求
数字化预案管理体系含有专家库和预案库。专家库内应包括突发事件相关联络负责人的信息,预案库内应包括不同类型事件预案的相关参数并进行分级分类。数字化预案管理体系应做到当突发事件发生时可以通过预案库对比匹配最优预案,并且救援结束后可以进行总结分析,对预案进行评价修正。
2.1.5 辅助决策分析体系需求
辅助决策分析体系的作用是作为分析工具帮助指挥人员了解水上突发事件现场情况,更好地为指挥人员作出准确判断,为决策分析提供保障,也因此辅助决策分析需要大量数据资源接入作为数据基础。
2.2 非功能性需求
系统数据需要有准确性,系统在稳定运行的前提下能够快速响应,尽量操作方便,可以灵活修改等。
3 水上多元救助力量协同调度系统总体设计
3.1 多元救助力量协同调度系统总体架构
系统按照模块化设计,将应急救援的各作业模块集成于统一框架下。数据探测层利用传感器实现对事故现场环境信息、气象水文信息、态势信息等的探测,利用现场的有线和无线网络进行通信,传输和接收各类救援信息。借助多元系统的数据共享结构、数据表示和存储方法及数据提取与分发等多元数据系统技术,对各类目标位置信息、环境状态信息等海量大数据进行存储和标准检验,利用各数据中心实现对现场数据的分析和实时处理,为决策系统提供相关信息和情报。
应急救援部门根据事件发生现场的实时状态信息和相关领域的技术信息,利用专家系统、数字化预案管理体系、标准和装备库体系等,采用多任务协同技术,给出准确可靠的救援作业方案,完成险情预警、救援决策、行动规划,实现对多元救助力量的的协同调度。图1 为以应急决策系统为主的复杂水上多元救助力量协同调度系统架构模型。

图1 多元救助力量协同调度系统架构模型Fig.1 Multi-relief assistance capacity collaborative dispatching system architecture model
3.2 多元救助力量协同调度系统协同规划设计
多元救助力量协同调度一般由地理、职能分散的多个部门参与,需要这些部门的协作规划。各部救援力量担负专门的任务。在整个过程中,根据不同应急方案行动之间的关系,通过协调机制对协作过程进行分析调整。如果协调无效,各部门的信息交互将会发生混乱,导致协调结果难以确定,最终方案调整失败。
本文研究多元救助力量协同调度系统任务规划框架作业中路径任务规划算法,其中协作任务规划框架使规划过程与协调过程交替展开,提升整体方案的生成效率,即在本地方案规划的过程中,只要生成一个子行动,就开展与其他部门的协调,协作任务规划可以使当资源发生冲突时也能保证其协同使用。
图2 为多元救助力量协同调度方案智能生成与评估的实现原理。

图2 多元救助力量协同调度方案智能生成与评估的实现原理Fig.2 The realization principle of the intelligent generation and evaluation of the coordinated scheduling scheme of multiple rescue assistance
3.3 信息流程设计
多元救助力量协同调度系统需要大量的数据作为支撑,有来自船舶及航行器的罗盘、GPS 等设备的信息;利用传感器测得的气象、风速、水的流速等环境信息;救援船和水下救援作业人员的航速、航迹、航向等信息;被救援人员位置、数量和状态信息;雷达探测到的视频图像数据、声呐探测图像等信息。
图3 为多元救助力量协同调度系统的信息流程。
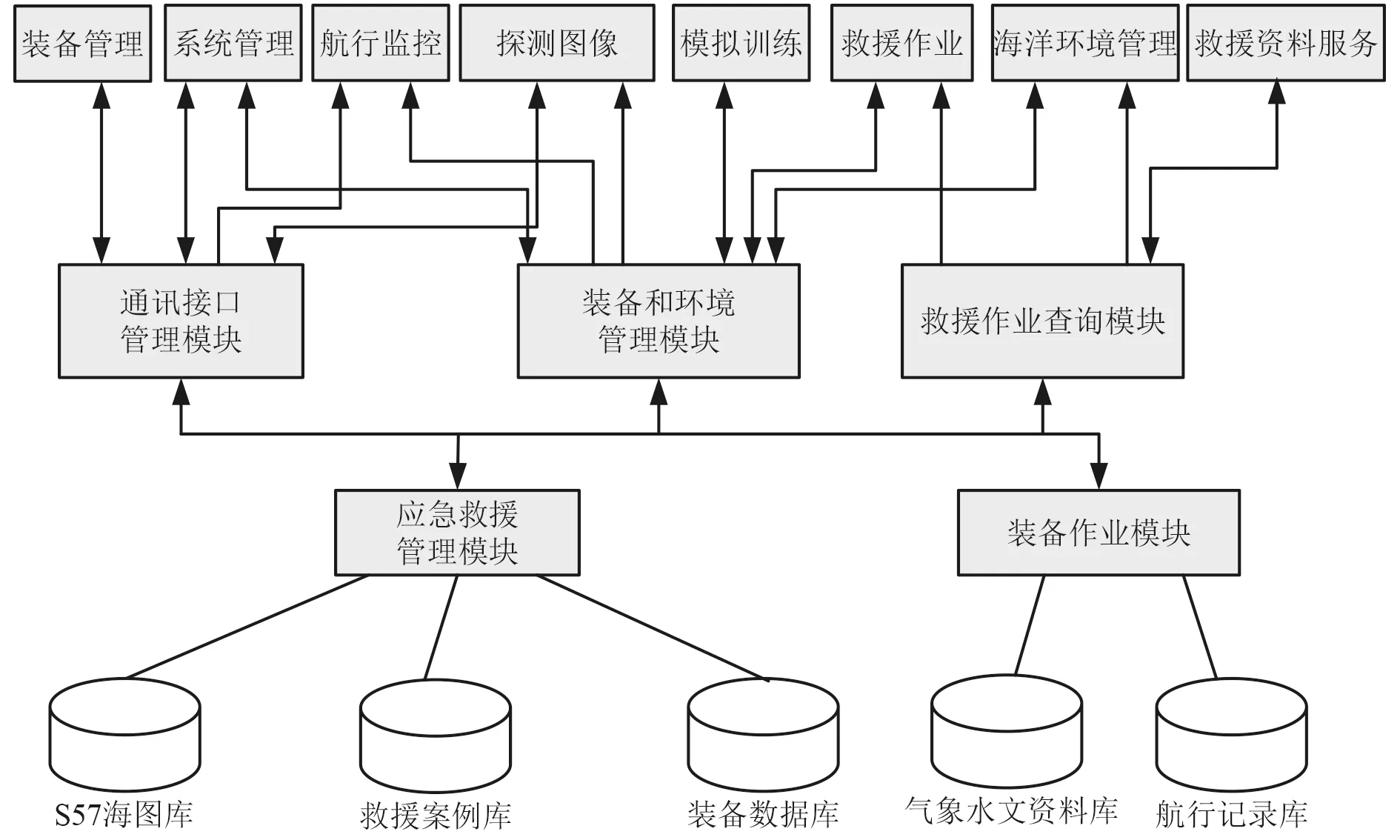
图3 多元救助力量协同调度系统的信息流程图Fig.3 The information flow chart of the coordinated dispatch system for multiple rescue assistance
3.4 数据交换平台设计
图4 为数据交换系统的体系结构。数据交换系统主要做到以下几个方面:首先各个系统要将需要共享的数据根据要求生成统一的XML 文件。每个业务系统都有自己的应用程序,具按照自身业务系统的数据特点开发,生成XML 文件时必须按照共同的数据标准规范。然后将XML 文件传到数据交换平台,主要是通过数据采集接口模块来进行。经过这一系列的转换传输操作,在数据交换平台中,所有的系统都可以查询所需数据,达到数据共享的目的。
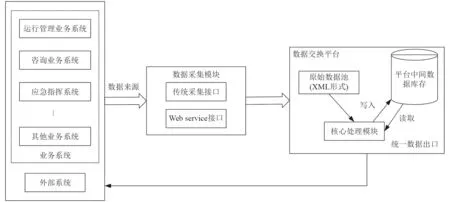
图4 数据交换系统架构Fig.4 Data exchange system architecture
数据交换平台主要包括3 个部分:原始数据池、核心处理模块、中间数据库。平台的主要任务是将各业务系统需要共享的XML 数据文件进行转换并存储。
1)原始数据池
它处在数据交换和存储模块最前方的位置,主要作用是将通过数据采集接口模块收集到的共享数据按照各业务系统进行分门别类的存放,数据形式为XML 文件。
2)核心处理模块
主要有2 种作用:首先将存储在原始数据池中的XML 文件存放入中间数据库中,这些数据文件需要按照规定的数据结构进行存储;其次将中间数据库中的共享数据传出给用户,这些共享数据在其中被处理成XML 文件。因此,核心处理模块的功能是进行数据处理和转换并进行数据传输。
3)中间数据库
由核心处理模块处理后的数据存储在中间数据库中,即需要共享的数据被集中存放在此。
利用数据交换平台的数据处理和存储功能,各个系统不需要改变自身的数据库结构,只需要将共享数据转换成XML 文件等通用的格式,用户就可以查询到这些数据,这样各系统仍然对自身的数据享有控制权。
3.5 最佳救援作业路线设计
使用人工智能算法(A*算法)进行水下最佳救援作业路线设计。A*算法作为寻路算法比较常用和经典,它的主要方法是从开始点向四处发散,不断逼近目标节点,最终可以得到一条路径,或者得到不可以到达目的的结论。
1)救援决策方案寻优方法在事故救援现场事态紧急、救援作业难度不一、作业人员和设备众多的情况下,系统方案的初始作业幅度AC0已充分考虑了救援规则的要求。因此,如果AC0对应的初始作业时机T s(AC0)≥0,则以初始T s(AC0),AC0和Tr(AC0)作为最佳救援作业路线实施方案;如果AC0对应的T s(AC0)<0,则令T s(AC)=0,并根据作业幅度量化模型重新解算AC0和Tr(AC),显然,立即避让AC和Tr(AC)就是对应的最优作业决策实施方案。
对于某些救援作业态势特定的情况,在满足安全的前提条件下,以作业决策实施后的作业时间最小为经济指标,建立动态决策优化目标函数为:

式中:N=(Tln−T s)/ΔT,△T为搜索步长;A为作业人员在寻优搜索空间T∈{Ts,Tln}内的行为集;S为状态集;V0为本船的航速。根据搜索步长可以得出相应的Tsk,然后根据Tsk可以算出相应的ACk;根据ACk可以解算所有搜索目标船结束时机Tr(ACk),式中的Trk(ACk)是它们的最大值,u∗就是J(s)极小情况下对应的最优决策。
2)救援决策方案校验方法
校验最佳救援作业路线构成的安全路线带上是否存在水面或水下碍航物,若不存在,则原作业决策方案可行,输出由T s(AC),AC和Tr(AC)构成的最佳作业决策实施方案;若存在,则需要修改原作业决策方案,直至通过方案验证。
4 水上多元救助力量协同调度系统关键技术
4.1 多元探测传感器信息综合处理技术
多元救助力量协同调度系统配备的传感器有GPS、流速传感器、罗盘、温度传感器以及声呐等。各传感器的信息通过数据管理模块进入到LAN,再通过LAN接口进入其中央处理、显示模块。系统内部的交互数据主要包括设计水下航行器路线、海图数据及报警信息等。为了确保救援作业的安全,不仅需要对传感器进行冗余配备,而且要通过数据管理模块对传感器的数据进行综合优化,以提高信息的精度和可信度。
数据处理的工作过程是:数据信息帧有效性检查(信号异常识别);数据合理性检查;信息帧完好和一致性检测,包括统一数制和量纲、时间归一化和坐标归一化处理;多个位置的传感器测量的数据进行集成处理;针对完好可信的测量数据,再进一步采用自适应Kalman 滤波,求解出精度更高的、一致可信的位置、航向、速度、流速、流向和航迹向等参数,使救援作业获取更加精确可靠的信息,为救援作业给予支持。
4.2 多元救助力量协同调度专家系统
近些年来人工智能应用到生活中方方面面,给人类提供了方便,发展迅速,因此专家系统作为该领域的分支被应用到多元救助力量协同调度系统中。多元救助力量协同调度专家系统运用计算机、现代控制、信息融合处理、虚拟现实和水动力学等技术将探测、操纵、作业、通信和控制等设备进行有机联合起来,建立集决策参数输入、决策推理、决策结果展示以及仿真的整套系统,并借助于水面遥控和水下自动控制来完成决策的实现。
系统开发结合交通控制理论、人工智能算法,以及计算机软件技术等多个学科,其目的在于通过救援作业专家数据库、结合推理机为应急救援人员提供出合理的作业决策支持。
4.3 多元系统异构数据共享技术
大多数现有救援系统之间的一体化程度和数据共享水平普遍不高,为了满足日益增长的数据共享需求,提高多元救助力量协同调度系统的智能化水平和作业效率,构建数据共享环境是达成这一目标的有效方法。异构数据库中包含一系列的数据库,不同的数据库可以在这些数据库之间交换软硬件和数据资源,保持各自的应用特性和安全性等。
4.4 多元智能规划技术
多元救助力量协同调度是一个涉及多部门的协作任务规划问题,通常需要多个部门参与,由于全局信息共享较为困难,局部应急态势均不相同,因此各参与部门不仅需要规划自身的应急任务,还需要协调所有部门任务规划方案。作为人工智能研究领域其中一个关键的研究内容,智能规划成为全世界相关专家学者的研究热门,并且在实践中得到广泛应用。智能规划包含很多种技术,层次任务网络(Hierarchical task network,HTN)是众多智能规划技术中的一种,主要结合领域知识,将开始时比较抽象复杂的任务逐步分解,使其变小,直到只需执行规划动作就能够使任务完成为止。这种HTN 方法与领域专家求解规划问题的思考方式类似。在实际规划问题中,客观世界作为一个确定性模型而存在,并且切合确定性假设和完全可观性假设,因而规划执行时系统状态的演化过程与规划时预测的系统状态变化过程相一致,保证规划解的正确性。
5 结语
本文主要针对水上应急救援多元力量调度系统需求,研究水上多元救助力量协同调度系统的概念,分析水上多元救助力量协同调度系统的能力需求,提出多元应急救助力量协同调度系统的总体设计。对多元救助力量协同调度系统关键技术−多元探测传感器信息综合处理技术、多元救助力量协同调度专家系统、多元系统异构数据共享技术、多元智能规划技术进行分析。
未来的发展趋势为:通过利用网络技术和数据共享技术实现在同一框架下多元救助力量协同调度,创新协同调度模式,把现场指挥部作为水上应急救援多元力量调度系统的核心,将应急救援作业过程中的任务细分,使现场应急指挥组织配置模式协作化、模块化,确保各项资源的充分高效利用,满足应急救援作业不断深入的系统化、智能化、动态化、灵活化要求。
