低速风洞试验模型振动主动控制技术
2021-09-16陈陆军车兵辉朱明刚杨铁军钟诚文
陈陆军,车兵辉,黄 勇,朱明刚,杨铁军,钟诚文
(1.西北工业大学航空学院,西安 710072;2.中国空气动力研究与发展中心,绵阳 621000;3.哈尔滨工程大学动力与能源工程学院,哈尔滨 150001)
飞行器风洞试验时,在模型前体不对称涡和翼(舵)面不对称涡等非定常力作用下,模型及支撑系统将产生较大幅度的振动,当振动频率与模型、天平和支杆系统的固有频率相近或重合时,甚至会产生剧烈的共振现象,严重影响试验的质量和安全[1]。在众多支撑形式中,尾撑试验系统因其悬臂梁的结构特点,振动问题尤为突出。对于悬臂梁结构的系统,传统的振动抑制方式是采用增加结构阻尼的被动控制方式,这种方法控制效率低,且只能针对某一频率的振动有效,不能适应不断发展的空间结构要求[2]。
随着计算机技术、现代控制理论的发展,利用压电材料结合系统动力学、自动控制等技术对振动进行主动控制已成为当今振动工程领域一项高新技术[3]。主动抑振的基本思想是通过传感器采集振动数据,通过计算机进行数据计算处理后输出信号,对受控系统主动输入外部的控制能量,使受控振动响应与原振动响应相抵消,以达到消除或减弱结构振动水平的目的[4]。
本文针对风洞中一种悬臂梁结构的尾部支撑机构,研制了一套基于压电陶瓷的抑振系统,采用基于自适应内模控制算法的主动控制技术对试验模型振动进行有效控制。
1 系统方案
低速风洞模型主动抑振系统总体方案如图1所示,主要包括两大部分:

图1 主动抑振系统总体方案Fig.1 Overall scheme of active vibration suppression system
(1)被控制的机械系统,由模型、天平、支杆和主动抑振模块组成。
(2)控制系统,由硬件和软件两部分组成,硬件主要包括压电陶瓷、驱动器、信号调理、NI Com⁃pact RIO 控制器和UPS 电源;软件主要包括运行于控制器上的控制算法和状态监测的人机界面。
主动抑振模块是控制系统的执行机构,采用压电陶瓷作为作动器,主动抑振模块安装在天平支杆根部。主动抑振模块工作原理如图2 所示。

图2 主动抑振作动器工作原理Fig.2 Principle of active vibration suppression actuator
主动抑振模块工作时,压电陶瓷朝下。图2 中1 与迎角头连接固定,工作时预先通过加载偏置电压使4 个压电陶瓷有一定的伸长量。以这个伸长量为基础,增加电压使压电陶瓷继续伸长,压电陶瓷产生的作用力通过铰链作用在结构上,对铰链形成一个力矩,从而使结构绕铰链向上运动;减小电压则可以使压电陶瓷缩短,主动抑振模块由于自身弹性就会绕铰链向下运动,因此给压电陶瓷输入一个偏置电压基础上的交流电压就会使结构产生俯仰振动,从而实现通过控制压电陶瓷的轴向运动进而控制天平端模型的俯仰运动。
2 控制系统
低速风洞模型主动抑振控制系统结构如图3所示。系统中功率放大器驱动压电堆,从而驱动主动抑振模块工作。模型载荷测量天平的输出信号作为主动抑振系统的输入信号。风洞信号包括速压信号和姿态角信号、功放的电流及电压信号、压电堆位置信号以及功放的状态信号为系统的监测信号。所有信号的输入输出通过信号分配箱,信号的类型有数字量和模拟量两种。远程控制器通过以太网与NI 控制器相连,远程控制器上安装软件以便实施系统控制任务。UPS 通过网络和系统相连,系统控制软件检测UPS 的状态,保证系统在停电时能可靠工作。

图3 控制系统结构框图Fig.3 Structure diagram of control system
天平的输出信号是在测量得到的试验模型所受6 个载荷量的基础上叠加整个试验系统由于风载引起的强迫振动响应,主要为系统的一阶和二阶模态振动,对应着试验模型的俯仰和偏航振动。主动抑振系统采用天平的输出信号经过高通滤波器后的振动信号作为控制器的参考输入,同时这也是振动主动控制的目标。
主动抑振模块的压电陶瓷配有位移传感器和温度传感器,前者测量压电陶瓷的位移量作为压电陶瓷驱动器闭环伺服控制模块的输入,以保证压电陶瓷输出位移与输入电压的随动性,温度传感器测量压电陶瓷的工作温度,可以在温度过高时报警和自锁。
系统软件具有联机控制和本机控制模式选择,联机控制时,控制系统通过工业以太网联入风洞现有测控系统,实现与试验调度管理机的通信联络,本机控制时,通过人机界面完成系统运行和状态监测。本机控制时,低速风洞模型主动抑振系统具有训练和试验两种工作模式。
(1)训练模式
训练模式通过控制压电陶瓷模块对试验模型及支撑机构进行扫频激振,完成试验模型及支撑机构的振动参数辨识和控制系统的控制参数自整定,这是一个自适应系统辨识过程[5],系统框图如图4所示。由NI CompactRIO 组成的控制器发出扫频或白噪声信号,驱动主动抑振模块,天平测量到振动信号输出。定义从主动抑振模块输入到天平振动信号输出之间的传递函数为主动抑振系统的误差通道,图4 中用S表示。设置一个有限长单位冲激响应(Finite impulse response,FIR)或者无限脉冲响应(Infinite impulse response,IIR)数字滤波器Ŝ,让S与Ŝ的输入相同,通过比较两者的输出,采用自适应最小均方根(Least mean square,LMS)算法可以得到一个最小均方误差意义下与S等价的数字滤波器Ŝ。

图4 系统训练模式框图Fig.4 Block diagram of training mode
(2)试验模式
试验模式完成试验模型的自适应主动抑振控制,其控制框图如图5 所示。图5 中d(n)表示单独由于风载在试验模型处产生的振动响应,与主动抑振模块工作时产生的振动响应叠加即为天平测量得到的振动信号e(n)。e(n)作为控制器的输入,加上控制器输出y(n)经过数字滤波器Ŝ的滤波,再作为自适应滤波器W(n)的参考输入,同时e(n)作为误差参数与自适应滤波器W(n)权系数的调整。当自适应过程收敛时,就能有效地抑制试验模型的振动响应e(n)。
3 控制方法
风洞模型在实际工作状态下无法获得如信号发生器输出这样干净和稳定的参考输入,其外扰信号是风载,为一随机激励,模型在风载下会发生前两阶模态的振动响应,这些振动响应会叠加在天平载荷中输出,影响天平输出信号的信噪比,严重时振动信号还会影响整个系统的安全。由于系统的振动状态、模型的姿态、试验风速和模型构型等因素相关,系统的线性模型与实际模型存在误差,且非线性变化不可忽略,因此利用天平输出中的振动信号来作为控制器的参考输入,采用自适应内模控制,以满足控制系统稳定性的要求[6]。
3.1 控制算法设计
控制算法采用自适应内模控制算法,其算法结构如图6 所示。显然,图6 中控制器F的传递函数可以写成


图6 自适应内模控制算法简图Fig.6 Diagram of adaptive internal model control algorithm
由此可得整个主动抑振系统的闭环传递函数

当主动抑振系统训练模式收敛时,可以得到

式(2)变成

相应地,其系统框图如图7 所示,这是一个前馈控制过程。因此通过合理地构造控制滤波器的结构形式,就能将一个自适应反馈控制变成一个自适应前馈控制[7]。

图7 自适应前馈控制系统框图Fig.7 Block diagram of adaptive feedforward control system
为了验证算法的有效性,针对俯仰抑振模块试验件系统,采用LMS 自适应内模控制算法[8⁃9],进行了模型俯仰主动抑振的试验研究。整个试验件振动主动控制系统控制框图如图8 所示。

图8 基于自适应内模控制的俯仰主动抑振系统框图Fig.8 Block diagram of pitch active vibration suppression system based on adaptive internal model control
整个控制算法为

式中:wl(n)为自适应控制滤波器W(n)在n时刻的第l阶权系数,L为滤波器的长度,y(n)为自适应控制器的输出,e(n)为天平测量到的振动响应信号,μ为收敛系数,d(n)为期望信号即风载单独作用时试验模型的振动信号,y′(n)为主动抑振模块作用时产生的试验模型振动信号,r(n)为期望信号通过误差通道数字滤波器滤波后的信号。
其中误差通道采用自适应离线辨识,辨识的结果为Ŝ(z),是一个256阶的FIR 滤波器[10]。自适应系统辨识过程系统框图如图9所示。

图9 自适应系统辨识Fig.9 Block diagram of adaptive identification system


保证算法稳定的收敛系数范围为

式中:λmax为r(n)信号自相关矩阵的最大特征值。
3.2 控制算法验证
信号发生器产生频率为3 Hz、2 V 峰值的简谐信号,驱动B&K 电磁式激振器激励试验件天平支杆的自由端质量,产生俯仰振动来模拟试验模型在风洞中风载下的振动响应。这个振动响应e(n)被安装在天平支杆自由端的加速度传感器采集,通过低通滤波器输入NI 控制器,这个信号与控制滤波器输出y(n)经误差通道辨识结果Ŝ(z)滤波后的信号ŷ(n)叠加,得到d̂(n),以最大限度地还原出期望信号d(n),作为自适应控制滤波器的参考输入。滤波器输出y(n)经低通滤波器滤波后输入压电作动器的功率放大器,使压电作动器产生轴向位移,作用在俯仰抑振模块试验件上,试验件端面产生绕铰链结构的摆动,从而在天平支杆自由端产生与源振动反相的振动响应。其试验结果如图10 所示,图10 中蓝的细实线为天平支杆自由端控前的振动响应,粗的绿实线为控后的振动响应。
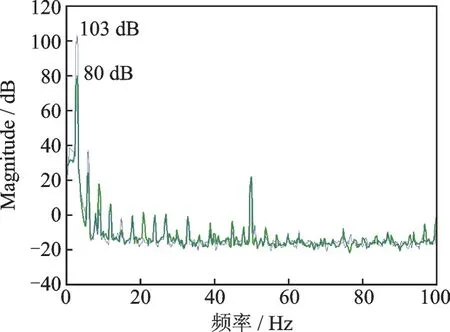
图10 基于自适应内模控制的俯仰试验件控制结果Fig.10 Control result of pitch test piece based on adaptive internal model control
结果表明,天平支杆自由端的振动加速度响应在3 Hz 的激励频率处控前为103 dB,控后为80 dB,主动控制消减量为23 dB,在2 倍频6 Hz 处的振动响应由控前37 dB 降至24 dB,而3 倍频9 Hz 的振动响应由控前的3 dB 升至18 dB,4 倍频12 Hz 的振动响应由控前的3.6 dB 升至6.36 dB,5 倍 频15 Hz 的 振 动 响 应 也 有7 dB(-1.5 dB 降至-8.9 dB)的主动消减量。实际上2 倍频以上的振动信号由于幅值较小,对总振级的贡献不大,一般可以不用考虑。从总振级看,主动抑振系统工作时,天平支杆自由端的振动响应下降约23 dB,振动减小90%以上。
4 风洞试验验证
验证试验在空气动力研究与发展中心的4 m×3 m 低速风洞中进行,试验采用YF⁃16 标准模型,风速70 m/s,试验迎角范围-8°~85°。试验时,模型迎角由安置于其内部的倾角传感器实时测量,不受主动抑振系统开闭影响。
试验机构模态测试结果表明,0°迎角时系统前两阶模态频率分别为5.5 Hz(偏航模态)和6 Hz(俯仰模态),而45°迎角时分别为5.63 Hz(偏航模态)和5.88 Hz(俯仰模态),相对变化不大;45°迎角时,系统的偏航刚度略有变大,而俯仰刚度略有减小。由于YF⁃16 标准模型在45°迎角附近振动幅度相对较大,因此选用45°迎角时辨识得到的误差通道来参与控制。
在70 m/s 风速下,模型迎角从-8°变化到85°,共20 个测量点。图11 和图12 分别为振动较大的45°迎角和80°迎角下试验模型在主动抑振模块工作前后的频谱图。图13 为各个迎角下主动抑振模块工作前后振级的棒状图(30°迎角之前振动相对较弱,减振系统未开启)。从图13 中可以看出,主动抑振系统开启后,在所有试验迎角下,振动均有显著减弱,振动响应下降11~20 dB,振动减小

图11 45°迎角控前控后频域响应Fig.11 Frequency domain control response of 45°AOA

图12 80°迎角控前控后频域响应Fig.12 Frequency domain control response of 80°AOA

图13 控前控后振动响应(对数坐标)Fig.13 Vibration response comparison (Logarithmic coordinates)
71%~90%。
振动减弱有利于提高试验安全性和相关传感器工作可靠性,减小相关物理量的波动,有助于提高测量结果的准确性和试验数据精准度。图14 和图15 给出了45°迎角下,测力天平某通道采集信号控前和控后对比情况(其他迎角情况类似)。从图14 中容易看出,开启主动抑振控制系统后,天平采集到的模型载荷信号的波动量明显减弱,获得的试验结果更为可靠。

图14 控前控后天平信号时域对比(红色为控后)Fig.14 Time domain comparison of balance signal be⁃fore and after control (Red is after control)
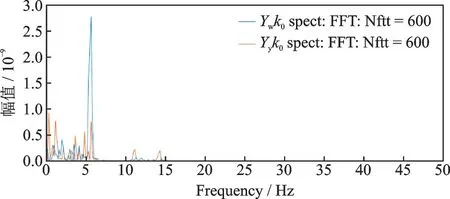
图15 控前控后天平信号频域对比(橘色为控后)Fig.15 Frequency domain comparison of balance signal before and after control (Orange is after control)
5 结 论
本文在以往相关研究基础上[11⁃13]针对悬臂梁结构的低速风洞尾部支撑机构研究了基于压电陶瓷的振动主动控制技术,采用自适应内模控制算法,通过天平获取振动信号作为控制系统的反馈,实现了尾部支撑机构的振动主动控制。风洞验证试验表明,研究的主动抑振系统适应性好,减振效果好,在所有工况下,试验模型及支撑系统的振动均可减小70%以上。
