面向集群对抗的多弹协同目标分配模型与仿真分析
2021-09-16吴诗辉夏青元
吴诗辉,贾 军,鲍 然,周 宇,夏青元
(1.空军工程大学装备管理与无人机工程学院,陕西西安710051;2.上海机电工程研究所,上海201109;3.南京理工大学计算机科学与工程学院,江苏南京 210094)
0 引言
当前,世界军事强国都十分重视发展无人集群作战装备,可以预见,无人集群将成为未来空防作战的重要威胁。美军率先提出了多导弹协同作战的概念,通过多枚导弹协同提高突防能力[1]。国内在多导弹多目标协同作战方面也开展了一些研究[2-8]。其中:文献[3]研究了多导弹协同作战的目标分配问题,主要针对多导弹对空中战机和地面目标的分配,以对目标形成的威胁指数和毁伤效果最大为目标函数,构建了优化模型,但攻击的目标并非集群目标;文献[5]研究了多导弹多目标协同探测的信息融合方法,能够完成多机动目标的协同探测任务;文献[6]研究了一种面向突防的多导弹协同弹道规划方法,通过弹道设计降低飞行过程中雷达探测概率,针对同地先后发射和不同地同时发射情况,均得到了满足攻击时间/攻击角度协同的优化弹道;文献[7]针对多无人机超视距协同作战多目标分配问题进行了探讨,主要针对的是多无人机对多作战飞机的目标优化分配,旨在解决如何根据战场态势合理分配目标,以避免重复攻击,并相互支援,充分发挥作战无人机的打击效能;文献[8]针对多导弹拦截高马赫数飞行器问题,研究了多个导弹如何协同配合,以覆盖其可能的机动空间并实施拦截的策略。同时,针对多导弹协同作战问题,许多学者就多导弹协同拦截目标的制导律[9-11]、多导弹协同发射时序规划[12]等问题进行了大量研究。
但是,现有文献缺乏对多导弹与无人机集群对抗的智能化目标分配方法的研究。本文针对多导弹多目标的空中集群对抗的目标分配问题开展研究,将该问题视为一个有约束的非平衡任务分配问题[13]。该问题不同于常规的武器目标分配问题(weapon target assignment,WTA)[2,14-19],区别在于不能直接得到弹目两两遭遇时的拦截效果,而是需要利用比例导引法进行弹道仿真,因此需要考虑过载约束、导弹运动时间约束、轨迹交叉等因素。同时,提出了分配均匀度的概念,以保证将导弹均匀分配给每个集群目标,提高综合毁伤效果。
1 问题描述
假设有nm枚导弹,欲协同抗击nt个无人机组成的集群。已知导弹的初始坐标和速度,如何快速进行任务分配,对nt个无人机进行最大程度的毁伤,是本文的研究目标。为方便研究,做以下假设:
1)导弹数量大于目标无人机数量,即nm>nt;
2)每个目标无人机至少分配一枚导弹进行攻击;
3)一枚导弹只能选择一个目标进行攻击;
4)考虑到导弹与目标遭遇时间非常短,通常只有几秒,认为只完成一次任务分配,即导弹分配一个目标后,不再更改目标;
5)假设导弹按照比例导引法对目标进行攻击,目标无人机始终匀速平飞,且导弹的初始速度远大于无人机飞行速度,导弹因空气阻力做匀减速飞行,减速的加速度为α;
6)用第i枚导弹与第j个目标遭遇时导弹与目标的末速度差ΔVij作为衡量打击效果的指标,目标是如何指派使完成任务的总效率最高,即
由于导弹数量nm大于目标数量nt,该问题可看作一个非平衡指派问题。不同于传统的非平衡指派问题,该问题的打击效果指标ΔVij需要经过比例导引法仿真得到,且存在导弹未能毁伤目标的情况(如导弹的末速度过低(假设最低拦截速度为Vlim),导弹在规定飞行时间tlim内不能飞到目标附近,导弹由于过载限制不能命中目标等)。
2 模型与仿真分析
2.1 态势初始化
假设有nm个导弹,编号为{M1,M2,…,Mnm},欲协同抗击nt个无人机组成的集群,编号为{T1,T2,…,Tnt}。
用一个六维向量表示导弹或者目标的初始态势,即:{X,Y,Z,v,θv,φv},如图1所示,其中前三项表示该实体的三维坐标值,第4项表示其速度大小(用马赫数表示),第5 项表示速度矢量与oxz平面的夹角(也称弹道倾角),第6 项表示速度矢量在oxz平面的投影OW′与ox轴的夹角(也称弹道偏角)。
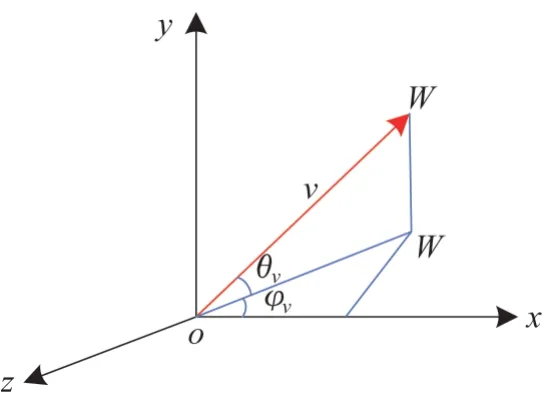
图1 三维空间速度矢量表示Fig.1 Velocity vector in 3-D space
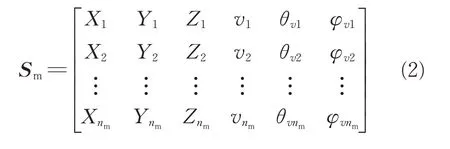
这样,nm个导弹形成态势矩阵为:
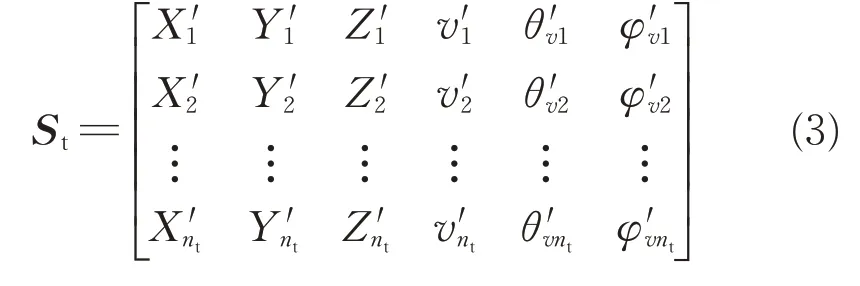
nt个目标形成态势矩阵为:
2.2 带约束的三维比例导引律仿真研究
比例导引法是在自寻的导弹上采用较多的一种导引规律,它易于工程实现,同时不需要太大的法向过载,对不同机动特性的目标适应能力较强,因此被广泛应用于各类导弹上[20]。
假设导弹(追踪实体)和无人机(逃逸实体)为质点,从运动学角度,实现三维空间中比例导引弹道的仿真,计算过程如下。
2.2.1 输入初始态势
逃逸实体位置(xt,yt,zt),速度Vt,弹道倾角θt,弹道偏角φt;追踪实体的位置(xm,ym,zm),速度Vm,弹道倾角θm,弹道偏角φm。
初始化循环次数n=1,运动时间t=0。
2.2.2 计算弹目相对距离R

2.2.3 判断是否拦截成功
判断R是否小于距离阈值,若是,表示拦截成功,结束循环,记录运动时间t,追踪实体末速度Vm1,及末速度差ΔV=Vm1-Vt;否则继续下一步计算。
2.2.4 计算追踪实体的飞行距离
选定一个足够小的时间间隔Δt,计算追踪实体在Δt时间内的飞行距离在三个坐标方向的分量,即
2.2.5 计算逃逸实体的运动距离
计算逃逸实体在Δt时间内的飞行距离在三个坐标方向的分量,即

2.2.6 计算追踪实体-逃逸实体相对距离变化量
计算在Δt时间内的追踪实体与逃逸实体相对距离变化,即
2.2.7 计算纵向过载ny和侧向过载nz

式中:k1、k2分别为纵向通道和偏航通道导引系数;

计算总过载nyz

如果nyz超过过载限制范围nmax,取

2.2.8 计算追踪实体弹道角变化量
计算在Δt时间内的追踪实体弹道倾角变化

计算在Δt时间内的追踪实体弹道偏角变化

2.2.9 更新追踪实体及逃逸实体位置及速度
更新追踪实体位置在三个坐标方向的分量:
更新逃逸实体位置在三个坐标方向的分量:

更新追踪实体弹道倾角:

更新追踪实体弹道偏角:

更新追踪实体速度大小:

2.2.10 判断是否拦截失败
更新运动时间:t=t+Δt。判断运动时间是否达到最大运动时间tlim,或追踪实体运动速度达到最低速度Vlim,若是,表示拦截失败,令t=-1 且Vm1=Vt,则末速度差ΔV=Vm1-Vt=0,计算结束,跳出循环;否则,令循环次数n=n+1,重复2.2.2~2.2.10。
2.3 获取弹目遭遇末速度差矩阵
令nm个导弹{M1,M2,…,Mnm},分别攻击nt个无人机集群{T1,T2,…,Tnt},用ΔVij表示导弹Mi攻击目标Tj时,二者遭遇时的末速度差,则两两匹配后可得到末速度差矩阵(ΔVij)nm×nt。

为计算方便,假定

由于遭遇时刻的末速度差越大,成功拦截的概率就越大,因此可用末速度差作为衡量方案优劣的指标。
2.4 非平衡任务分配模型
则优化模型可描述为
式中:目标函数表示所有导弹与其分配的目标遭遇时的末速度差之和达到最大;第一个约束函数表示分配用来攻击第j个目标的导弹的最大数量为L,最少为Lmin个(默认取1,若考虑至少两发导弹攻击1 个目标,则可取2),这里L也称为分配均匀度,Lmin为最小分配均匀度,且Lmin≥1。例如,当L=2 时,表示每个目标最多有2 发导弹对其进行攻击;第2 个约束函数表示每个导弹必须选择且只能选择一个攻击目标。
该模型是一个0-1 整数线性规划问题,常用的求解方法有隐枚举法和匈牙利算法。运用MATLAB 或LINGO软件,可以很快得出最优解。
2.5 轨迹交叉判断模型
在仿真的同一时刻,若两追踪实体之间的距离小于dmin时,认为存在轨迹交叉。在采用以上寻优方法得到分配方案后,需要验证在该分配方式下整个运动过程中是否存在轨迹交叉的情况,即遍历在所有运动时刻,判断任意两个追踪实体Mi1、Mi2之间的距离是否满足

式中:(xMi1,yMi1,zMi1)、(xMi2,yMi2,zMi2)分别表示Mi1、Mi2在同一时刻的坐标。
若某一时刻存在某两个追踪实体之间的距离不满足以上条件,则采取对其中一条轨迹增加惩罚系数的方法,以避免出现轨迹交叉的分配方案。令其中一条末速度差较低的轨迹为拦截失败即可,即该轨迹对应的导弹-目标组合的末速度差取为0。
2.6 问题求解步骤
步骤1:初始化。随机生成导弹群的态势集、目标无人机群的态势集。
步骤2:获取弹目遭遇末速度差矩阵。遍历每个导弹对每个目标的攻击效果,利用第2.2 节的比例导引法,仿真得到导弹运动轨迹,以及末速度差矩阵。
步骤4:判断最优分配方案是否出现两两交叉。如果未出现交叉,认为导弹群不会出现轨迹交叉情况,输出最优方案,算法结束;否则,令交叉轨迹中末速度差较小的一个导弹-目标组合为拦截失败(假设ΔVIJ为出现交叉中末速度差较小的一个),即令ΔVIJ=0,返回步骤3重新进行优化,直到找到最优方案。
3 算例分析
假设已知初始态势如表1所示。其中前10行表示导弹的态势;后5行表示无人机集群的态势。假设弹目遭遇成功的阈值为:dmin=5 m,导弹的最大过载:nmax=20g(超出最大过载按照最大过载运动),导弹在飞行过程中因阻力做匀减速运动(α=-87.43 m/s2),比例导引法导引系数均取5,导弹Vlim=0.3Ma,tlim=10.5 s。

表1 初始态势数据Tab.1 Initial situation data
利用第2.2 节的仿真方法,得到追踪实体-逃逸实体末速度差如表2所示。

表2 遍历末速度差表Tab.2 Final speed gap matrix for all pairwise combinations m/s
利用第2.4 节的优化模型,假设分配均匀度L为2、3、4,可算出最优方案如表3所示。其中,当L=2时,最优分配[2,2,1,5,5,1,3,3,4,4],表示T1分配给导弹M3和M6,T2分配给M1和M2,T3分配给M7和M8,T4分配给M9和M10,T5分配给M4和M5。此时,末速度差之和为1 577.6,未出现轨迹交叉。该最优分配方案对应的三维轨迹图如图2所示,从图2 中也可以看出,对每个目标,均有2发导弹对其攻击,且拦截点有一定距离,故轨迹未出现交叉。
表3 不同分配均匀度对应的最优化方案(当Lmin=1时)Tab.3 Optimum schemes for different maximum assigned missiles for a single target(when Lmin=1)
图2 L=2时的最优分配方案(未出现轨迹交叉)Fig.2 Optimum assignment scheme for L=2(No trajectory intersection occurs)
对于L=3,最优分配方案为[2,1,1,3,5,1,3,2,2,4],经判断,导弹M1和M8在攻击T2时出现了轨迹交叉。该最优分配方案对应的三维轨迹图如图3所示,从图3 中也可以看出,对于目标T2,有3 发导弹对其攻击,且拦截点几乎重叠,这导致了飞行末段出现轨迹交叉。因此,该方案不可行,根据2.5 节的方法,令其中一条末速度差较低的轨迹为拦截失败即可,即该轨迹的末速度差取为0。由表2 可知,ΔV12=ΔV82=173.3 m/s,故随机选择其中一条轨迹,假设ΔV12=0,得到表4,利用优化算法,得到新的最优分配策略为[3,1,1,3,5,1,2,2,2,4],经检验,此方案未出现轨迹交叉。该最优分配方案对应的三维轨迹图如图4所示,从图4 中也可以看出,对于目标T2,有3 发导弹对其攻击,且拦截点相互错开一定距离,未出现轨迹交叉,可作为L=3 时最优分配方案。
图3 L=3时的最优分配方案(出现轨迹交叉)Fig.3 Optimum assignment scheme for L=3(Trajectory intersection occurs)
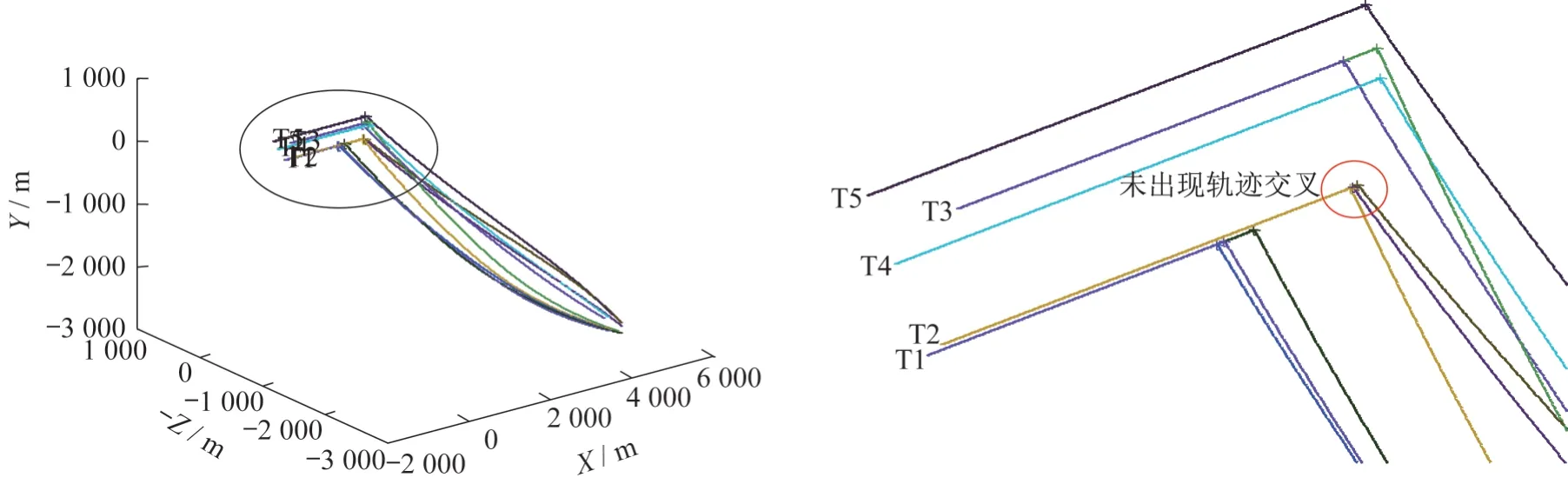
图4 L=3(改)时的最优分配方案(未出现轨迹交叉)Fig.4 Optimum assignment scheme for L=3 with modified final speed gap matrix(No trajectory intersection occurs)

表4 修改后的遍历末速度差表(*表示修改的)Tab.4 Modified final speed gap matrix for all pairwise combinations(where*means the modified value)m/s
为了说明本文方法的有效性,本文对比了文献[21]在武器目标分配问题中采用的遗传算法,其中遗传算法按照实数编码,编码共10位,取1到5之间的整数,如表5中的最优分配结果的形式(2254513314表示一个染色体编码),非线性约束条件为10 个编码位取值1 到5 的次数均应介于[Lmin,L]。算例运算均在Intel Core i5 2.3GHz 的计算机上实现,优化结果及用时如表5所示。
由表5 可知,采取文献[21]的遗传算法建模求解该问题,随机运行5次,优化的平均用时达到3 s以上,且只有第5 次的结果达到了最优解,其余4 次均为满意解。本文方法随机运行了3 次,每次都能够精确找到最优解,且用时均不超过20 ms,能够满足实时性要求。显然,无论从解的精度、还是实时性要求上,本文方法均优于文献[21]的遗传算法。
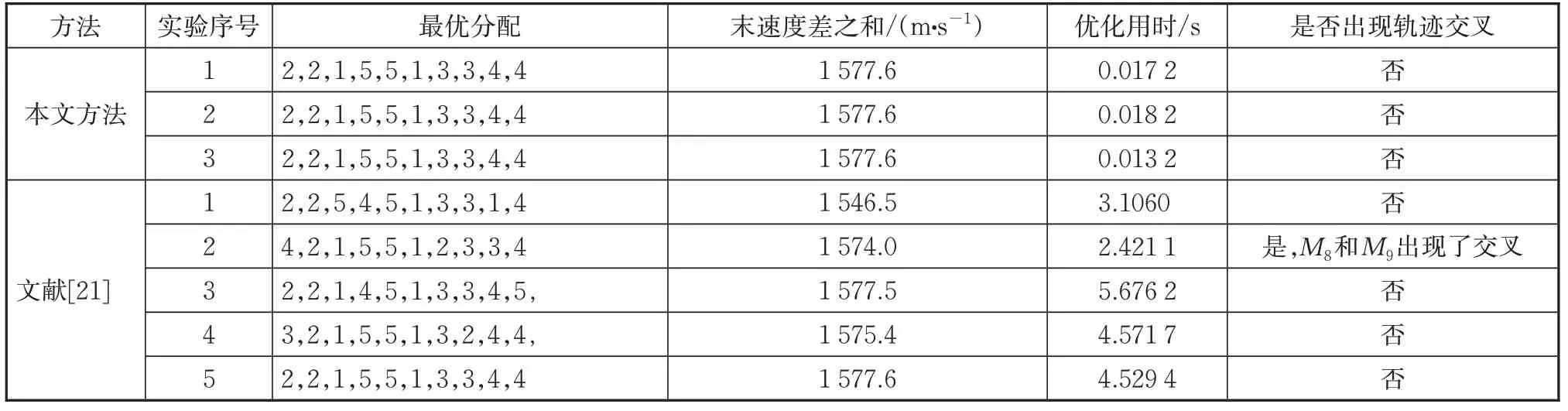
表5 不同算法的比较(当Lmin=1且L=2时)Tab.5 Comparison results of different methods(when Lmin=1 and L=2)
几点说明:
1)关于分配均匀度L的选择。笔者认为,分配均匀度不宜过大,尽管分配均匀度为3时,可以得到更大的末速度差之和(如表3所示),但是,L取值过大可能导致以下问题:一方面,可能出现多个导弹被分配打击同一个目标的情况,增大了发生轨迹交叉的概率,如L=3 和4 时,均出现了轨迹交叉;另一方面,会导致更多的目标只能被分配到1 枚导弹,这样势必带来命中概率降低的问题,如表3 中,当L=4 时目标T3和T5均只有1 枚导弹对其实施攻击,成功概率将会低于两发导弹同时对其攻击的情况(如L=2 的最优方案)。故建议分配均匀度取值介于和之间,其中表示比该值大的最小整数,表示比该值小的最大整数。如表6所示,按此分配均匀度设计,可保证每个目标分配到数量接近的导弹数,从而保证对目标集群的最大毁伤概率。

表6 分配均匀度的优化设计Tab.6 Optimum design of maximum assigned missiles for a single target
2)关于目标威胁权重不同的情况。对于集群中威胁度高的目标,应分配更多的导弹。对于这类问题,可以通过修改模型公式(22),通过增加设定一个约束条件(其中,J为需要指定攻击导弹数量的目标序号,LJ为针对目标J指定的分配导弹数量),以保证对威胁度高的目标具有更高摧毁概率。
4 结束语
本文设计了一种面向集群对抗的多导弹协同目标分配方法。将该问题转化为一个带约束的非平衡任务优化分配问题,其中的约束主要包括目标分配方案可能出现的轨迹交叉、过载约束、导弹飞行时间约束、分配均匀度约束等。通过仿真分析可知,本文方法能够有效进行目标分配,实现对目标集群打击效率的最大化。案例部分对比了不同分配均匀度下的最优方案,并据此提出了分配均匀度L的选择建议,同时,对目标威胁权重不同的情况如何优化分配进行了说明。
本文算法假定目标始终匀速运动,未考虑目标的机动,同时,由于比例导引法无法解析计算末速度,需用仿真方法求得,而仿真需要消耗较大的计算量,是整个分配优化算法的计算瓶颈。针对以上问题的改进,是下一步的研究重点。
