基于空化射流的深水网箱清洗机器人设计应用*
2021-09-15刘思源黄林琪范桂兵朱庭琨陈伯豪俞国燕
刘思源,黄林琪,范桂兵,朱庭琨,陈伯豪,俞国燕
(广东海洋大学,广东 湛江 524088)
0 引 言
在海水养殖中,有很多不同的养殖方式,其中网箱养殖是一种重要的养殖方式,包括近海网箱和深水网箱养殖,海下的环境相对于陆地的环境而言,更加复杂,因此在未来,无论是普通的近海网箱养殖还是近年来不断发展的深水网箱养殖都需要往智能化、自动化、环保节能高效等方向发展,而智能化、自动化的发展往往依靠养殖生产模式和配套设施,因此在我国网箱养殖产业的发展与现代化的海洋设施养殖生产模式的发展紧密相关[1]。而且,在网箱养殖的过程中,网箱上的网衣常常会因为海洋中的浮游动植物的附着滋长而影响网箱内外的水体交换,更严重的是长时间的附着会损坏网箱网衣,需要进行网衣更换作业,增加网箱养殖的成本[2],因此对于网箱养殖而言,网箱网衣的清洗工作的重要性不言而喻。
目前,国内的网箱清洗设备还是比较少,关键的清洗技术大多类似,且较为薄弱,智能化自动化程度不高,传统的清洗技术以人工清洗为主,大多需要人工进行操作,工人作业量较大,劳动力成本较高,清洗网衣效果较差,清洗工作效率不高,因此对于上述痛点,网箱清洗技术和方案的研究刻不容缓。
笔者根据网箱网衣清洗的特点,提出基于空化射流的深水网箱清洗机器人的设计方案,通过对现有的网箱清洗机器人方案综合分析对比其优缺点,得出基于空化射流的深水网箱清洗机器人的设计方案能够达到有效清洗网箱网衣的效果,解决清洗效率较低,自动化水平不高,清洗效果差等问题,以此能够更好的提高我国海洋网箱养殖产业自动化智能化水平。
1 网箱网衣清洗特点
网衣是网箱养殖中不可缺少的部分,也是网箱清洗的主要清洗对象,网衣的规模巨大,大小不一,特别是深水网箱,长达几十周长的网衣比比皆是,而且网衣主要使用场所为海下,所以清洗难度大,且清洗效果要求高。以下是前往广东省湛江市东海岛调研活动中所拍摄到的照片。
由图1可知,网衣上有较多的孔洞,且网衣规模尺寸巨大,极易使得海水中的浮游动植物,如藻类贝类等附着性较强的生物附着会对网箱内养殖鱼类的生长活动产生影响,因此对网衣的清洗作业需要定时进行,并达到一定清洗效果,这要求清洗方式和清洗设备需要具有极高的清洗能力。所以,在网衣的自动化智能化、以及高效清洗的实现上,清洗方式和清洗设备的选择在清洗网箱网衣的过程中显得十分重要。

图1 网衣上的附着物
目前,对于网箱清洗,可普遍分为物理、化学和生物等三类防污法[3],具体主要有九种方法:人工、生物、机械、药物、物理等五种清洗方式以及阳光暴晒、沉箱法、定期换网法以及上提下沉法[4]。其中人工清洗和阳光暴晒这两种方法都较为原始,而且所需的工人量较多,工人作业量大,劳动力成本高。当前国内主流是使用高压水枪,将网衣拖上岸人工刷子清洗, 国内市场上还尚未大规模地与水下机器人相结合使用[5]。但是,随着网箱养殖产业不断向着智能化、自动化、环保节能高效方向发展,机器清洗逐渐代替人工清洗,越来越多的网箱养殖户开始利用机器对网箱网衣进行清洗,与人工清洗下相比,机器清洗的特点是清洗高效,操作方便、安全、省力,可以保证较高的清洗效果的同时也能保证工作效率。
2 基于空化射流的深水网箱清洗机器人设计
根据网箱养殖的特点以及对网箱网衣清洗中现阶段存在的问题综合分析后,提出基于空化射流的深水网箱清洗机器人设计方案。基于空化射流的深水网箱清洗机器人利用与高压射流不同的空化射流来进行网衣清洗作业,主要的设计依据来自于对空化射流这一新技术的应用以及实际网箱网衣清洗的需要,设计的清洗机器人具有一定的创造性和创新性。
基于空化射流的深水网箱清洗机器人主要由三大系统组成:驱动系统(见图2)、控制系统(见图3)和清洗系统(见图4)。驱动系统适应性强,能够适应多种规格网箱网衣,提供爬行动力;控制系统调整性能好,搭载了摄像头,并通过四周螺旋桨动力调节机器的方向,使清洗效果更加全面;清洗系统由上位机高压水泵和下位机清洗盘组成,采用空化射流技术,通过高压水流使歧管高速旋转,喷出水流达到清洗效果。

图2 驱动系统 图3 控制系统

图4 清洗系统 图5 基于空化射流的深水网 箱清洗机器人实体图
基于三大系统,该设备有三大主要功能水下网衣清洗功能、水体环境检测功能、实时视频监测功能。通过三大功能,用户只需通过遥控手柄即可对基于空化射流的深水网箱清洗机器人进行实时控制,通过显示屏,即可简洁明了地掌握网箱内部各种情况,能够检查网箱网衣的破损情况,也能够观测网衣上附着物的程度,进而判断是否需要对该网衣进行清洗,用户无需进行换网、晒干等繁杂步骤后方可进行网衣清洗,可以定时进行清理,预防附着物过多导致的水中含氧量降低,降低养殖风险。
该设备基本上摆脱了人工下水操作,利用上位机和下位机,只需要通过遥控手柄即可对网衣清洗机器人的运动进行控制,同时采用履带轮,履带总成中采用质量小、振动轻、耐腐蚀性强以及适合水下作业的胶齿驱动式橡胶履带[6]。为操作方便,网衣清洗机器人采集的数据经过配套软件处理后能由显示屏显示,同时对采集的数据进行分析与处理,通过显示屏显示拟合的图像和养殖日记供用户参考,对种植过程实施精细化管理,以提升管理水平,节约管理成本。
通过与人工对比分析可以得出,该设备在进行网箱网衣水下作业时,比起人工潜水作业,机器下水安全性更高,且利用空化射流技术,具有创新性和高效性,利用多路高压水枪高速旋转所产生的大量气泡破裂的能量来清洗网衣上的附着物,能够实现更为充分有效的网衣清洗,与同类型作业级ROV水下机器人相比,该设备工作效率更高,且更具多样化功能,且能满足大部分养殖户对成本等个性化要求。图5所示为基于空化射流的深水网箱清洗机器人的实体图。
3 清洗机器的备选方案介绍
结合上述网箱网衣的特点及其现场工况,并参考国内外同行清洗设备,介绍分析两种备选方案,分别是涡旋水流式网箱清洗设备、歧管式高压射流水下洗网机。下面将分别介绍备选方案的可行性及其特点。
3.1 涡旋水流式网箱清洗设备
涡旋水流式网箱清洗设备使用了汽油机作为原动力,主要以水泵和转动圆盘为两个部分组成,通过水泵将汽油的化学能与水流的机械能转化,以此来达到提供能量的目的,而水流的机械能转化为圆盘的转动动能是利用转动圆盘通过水流对圆盘的反作用力实现的,实现机械能与转动动能的互换,最终带动毛刷的运动,通过毛刷充分接触摩擦网箱网衣,达到机器清洗网衣的目的,同时在深海网箱养殖产业中,因深海网箱离岸较远,产生无法为机器提供动力的问题,而通过该设备的设计,利用汽油机则能够有效的解决此问题,提高了工作效率[7]。
由图6可知,通过对该网箱清洗设备的综合研究分析可知:该设备设计合理,结构紧凑,能够有效的解决动力问题,优点显而易见;但是由于使用该设备必须需要人工进行配合,需要操作人员携带设备潜入水下进行清洗工作,对劳动力的要求较高,人工劳动密度较高,智能化程度较低,同时其消耗的能耗大,使用汽油机作为动力,对环境污染大,且海水的侵蚀极易损坏该清洗设备内部的轴承,维修成本较高,故缺点也同样明显。
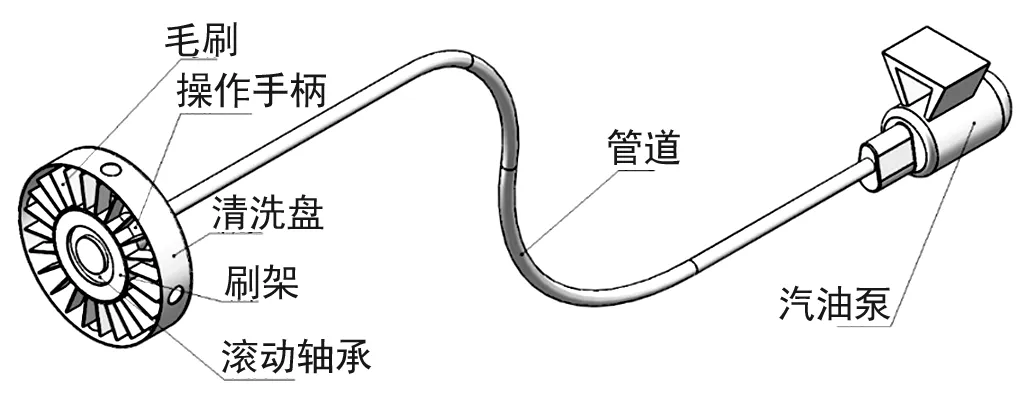
图6 涡旋水流式网箱清洗设备简图
3.2 歧管式高压射流水下洗网机
歧管式高压射流水下洗网机虽然结构比较简单,但是其具有灵活性强,安全性好等优点。
随着网箱养殖产业发展不断朝着环保高效节能转变,网箱网衣清洗设备也在不断朝着水动力和太阳能电力驱动等环保节能方向发展,因此以利用水动力来解决岸电供应困难的痛点问题的歧管式高压射流水下洗网机,也顺应了网箱养殖产业的发展趋势。由名字可知,该设备主要是利用导流式的歧管以旋转的方式进行网衣的清洗,其工作原理主要是利用前挡板,旋转式的高压水流通过多个喷嘴喷射出,将清洗设备能够清洗的网衣面积扩大,同时利用后盖的通孔将螺旋桨上的叶片进行旋转操作,在这其中所产生的水流推力基本消除,使得清洗设备能够在清洗作业的过程中与网衣一直紧贴,降低操作员的劳动强度,提高了对网衣上的附着物的清洗效果,增强安全性。
歧管等一系列新技术的引入使得歧管式高压射流水下洗网机能够在一定程度上克服高压仓式洗网机水头损失大的缺点[8],提高了清洗效率,同时,该设备的维修成本为同行业其他设备相比较低,但是其缺点同样明显,还是未能摆脱需要人工操作的问题,劳动力依赖程度高,自动化水平较低。
4 应用效果对比
通过对上述 3 种方案的介绍及其综合性能的分析,最终甄选出基于空化射流的深水网箱清洗机器人设计方案,具体优缺点对比见表1所列。

表1 网衣清洗设备的三种方案比较
由表1可知,基于空化射流的深水网箱清洗机器人设计方案与其他两套方案相比,虽然维修成本相对较高,但是考虑到网箱养殖与普通的渔场不同,特别是深水网箱养殖,作为高投入高收入高风险的行业,资金投入规模较大,且随着劳动力越来越紧缺,人工成本也在不断的上涨,从长远来看,购置网箱清洗机器人的成本比起人工成本随着时间的推移会不断的减少,时间越长,人工成本越高,而网箱清洗机器人的成本越低,且机器人能够满足养殖过程中的多种作业需求。
5 结 语
通过对网箱网衣清洗中3种设备方案的讨论与分析得出最适合网箱网衣清洗的基于空化射流的深水网箱清洗机器人设计方案。该方案清洗网箱网衣效果好,工作效率高,自动化水平高,并且节能环保,安全稳定性高,达到了设计预期,且通过实际应用表明,该方案大大降低了网箱清洗作业对人工的需求,不断提高了产业自动化水平,达到预期设计方案的要求。
