基于双边拟合的高稳定性共焦拉曼光谱定焦方法
2021-09-14张蕊蕊赵维谦邱丽荣
张蕊蕊, 赵维谦, 王 允, 邱丽荣
北京理工大学光电学院精密光电测试仪器及技术北京市重点实验室, 北京 100081
引 言
共焦拉曼光谱技术同时继承了拉曼光谱的“分子指纹”特性和共焦显微技术的高分辨层析成像特性, 被广泛应用于材料科学[1]、 生物医学[2]、 物理化学[3]等领域。 由于共焦拉曼系统采用“点”激发和“点”探测的探测机制, 而且拉曼散射光谱信号强度微弱, 因此单点探测需要的积分时间较长, 导致整个成像时间可长达数小时甚至数十小时[4-5]。 在常规共焦拉曼光谱技术的成像过程中, 系统的轴向位置通常被认为是不变的。 但是, 在漫长的测量过程中系统容易受环境温度变化、 空气扰动等影响产生漂移, 导致样品不再位于焦平面位置, 样品的离焦会降低光谱信号强度以及拉曼图像分辨率[6-7]。 在大数值孔径的共焦拉曼系统中, 当离焦量大于1 μm时, 拉曼图像的分辨率下降量超过15%, 从而导致生成的图像模糊。 因此, 高精度定焦是补偿系统漂移并保证高图像质量的关键。
为了补偿系统漂移的影响, 通常采用以下两种方法: (1)在共焦拉曼系统中添加辅助聚焦光路, 用于确定探测过程中焦面的位置[8-12]。 例如, 彩色共焦显微镜[8-10]通过物镜使白光沿光轴聚焦, 并根据反射光的波长确定样品的表面位置。 该方法具有较宽的测量范围(毫米量级), 但其定焦精度相对较低(微米量级)。 基于图像分析[11-12]的聚焦方法使用CCD采集不同轴向位置的样品图像, 然后利用具有最大对比度的图像确定样品位置, 该方法对于物镜的焦平面和CCD像平面的共轭光学以及样品表面的反射率均匀性均有严格的要求。 (2)可利用拟合拉曼光谱强度轴向响应曲线顶点确定焦点位置[13-14]。 通过快速扫描获取不同轴向位置处的光谱强度信号, 并使用最大强度确定样品表面的位置。 该方法系统结构简单, 并且对样品的反射率没有严格要求。 然而, 由于拉曼光谱强度轴向响应曲线在焦平面附近的轴向灵敏度较低, 限制了共焦拉曼系统的定焦精度。
为了提高共焦拉曼系统的定焦精度, 本文提出了一种双边拟合共焦拉曼光谱探测方法(bilateral fitting subtraction confocal Raman microscopy, BFSCRM)。 该方法利用拉曼光谱轴向强度响应曲线关于焦平面位置左右对称的特点, 分别直线拟合半高宽附近处的轴向位置敏感的两段区间数据, 然后将两条拟合直线相减获得差分直线, 最后通过差分直线过零点的位置对系统精确定焦。 该方法提高了系统定焦的灵敏度和精度, 且具有较好的抗噪能力。 通过该方法补偿了测量过程中的离焦误差, 提高了成像的稳定性, 进而保证共焦拉曼图像具有较高质量。
1 原理及仿真
1.1 共焦拉曼系统原理
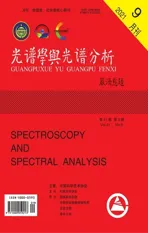
共焦拉曼系统原理如图1所示。 激光经过扩束器准直扩束后被Notch Filter反射进入显微物镜, 并聚焦于被测样品表面, 激发出载有样品微区物质组分信息的拉曼散射光, 拉曼散射光经过显微物镜后透过Notch Filter, 被会聚镜聚焦于共焦针孔, 最后被光谱仪收集。 通过二维扫描台带动样品进行横向扫描, 通过物镜驱动器带动显微物镜实现高精度的轴向扫描。 在共焦拉曼系统中激发光源、 样品表面和共焦针孔分别位于彼此的共轭位置, 因此样品的离焦散射光会被针孔屏蔽, 光谱仪只能接收来自受激发的样品表面拉曼散射光, 从而保证了共焦拉曼光谱显微系统具有较高的空间分辨力。
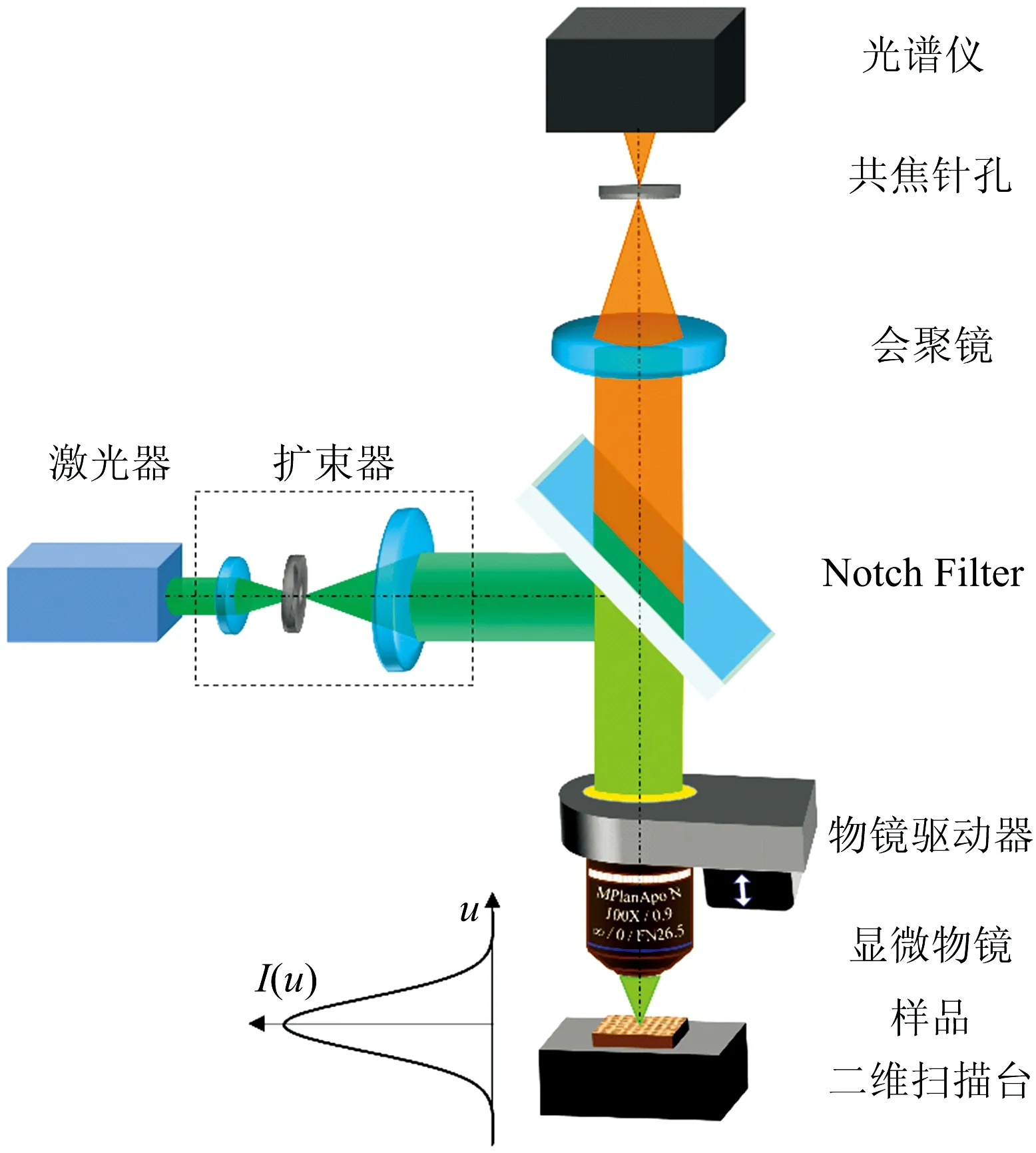
图1 共焦拉曼原理图Fig.1 Diagram of confocal Raman microscopy
1.2 双边拟合算法仿真分析
双边拟合共焦拉曼光谱探测方法的定焦原理如图2所示。 可以看出, 在I=0.5附近, 拉曼光谱强度轴向响应曲线光谱强度I随离焦量u的改变而迅速变化, 并且曲线在该区域内的变化趋近于线性关系。 分别对曲线两侧的部分区域进行线性拟合, 可以得到拟合直线IA和IB。 假设这两条直线的斜率分别为kA和kB, 截距分别为cA和cB则这两条直线可表示为
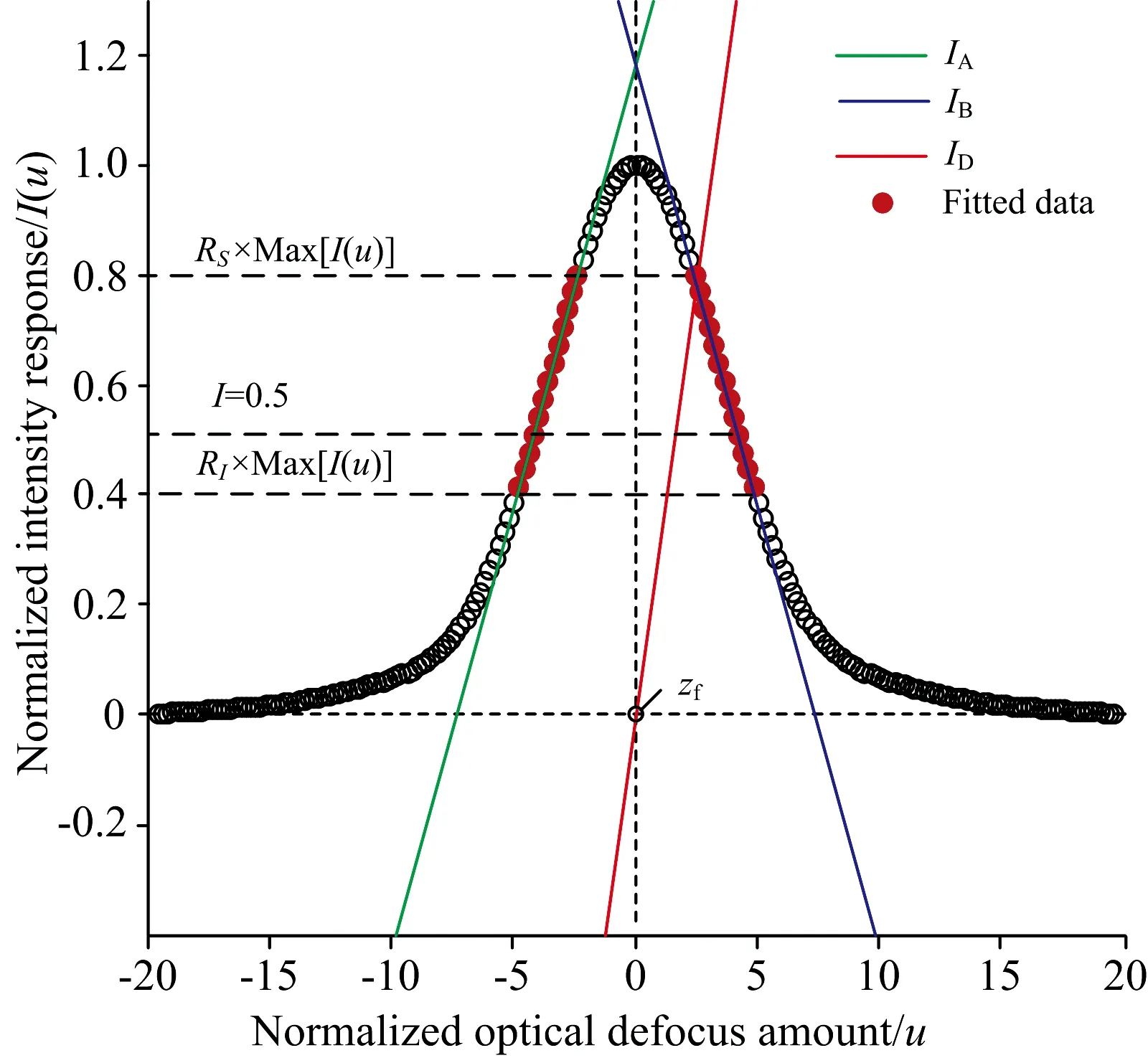
图2 双边拟合共焦拉曼光谱探测方法定焦原理Fig.2 The relationship between the lateralFWHM and the defocusing amount u
将上述两条直线方程相减后得到差分直线ID, 其对应的方程
ID=IA-IB=kAu+cA-kBu-cB
=(kA-kB)u+(cA-cB)
(2)
由于拉曼光谱强度轴向响应曲线关于焦平面位置对称, 因此差分直线ID的过零点zf的横坐标对应着共焦拉曼系统焦平面的位置。 且由对称性可知kA≈-kB, 差分直线ID的斜率约为2kA, 说明双边拟合共焦拉曼光谱探测方法拥有较高的定焦灵敏度。
依据双边拟合共焦拉曼光谱探测方法定焦原理, 拟合区域内数据的线性度会对双边拟合共焦拉曼光谱探测方法的定焦精度产生影响。 在图2中, 用于双边拟合的区域表示为[RI×max(I(u)),RS×max(I(u))], 其中RS和RI分别是拟合的区域因子上限和下限, 且都在区间[0,1]内取值。 本文采用拟合优度判定因子R2对所取区间的线性度进行判定[15], 为兼顾拟合优度、 系统信噪比和拟合的数据量, 本文RI和RS取值分别为0.4和0.8, 此时拟合优度R2=0.999 8。
在实际测量中, 共焦拉曼系统的系统误差、 随机噪声及轴向扫描间隔均会对双边拟合算法的定焦精度产生影响。 系统误差主要是光学系统在装调时所产生的像差, 由Seidel像差公式可知, 像差主要由初级球差A040、 像散A022、 慧差A031、 场曲A120以及畸变A111, 由于共焦拉曼系统是共轴系统, 因此系统的慧差、 场曲以及畸变一般较小, 而球差和像散较大。 另外通常用信噪比(SNR)评估随机噪声对系统的影响。 本文仿真了不同扫描间隔时, 系统误差和随机噪声对定焦精度的影响。 在仿真分析时, 归一化的轴向定焦结果的均方根误差(RMSE)被用于评价定焦精度。
从图3(a)和(b)可以看出, 在较大的扫描步距下, 球差和像散对双边拟合共焦拉曼系统RMSE影响很小, 即系统像差的变化对定焦结果影响较小。 由图3(c)可以看出, 双边拟合共焦拉曼光谱探测系统的RMSE随着信噪比的降低而增大, 当信噪比为50 dB时, 其RMSE仍小于0.07, 说明双边拟合共焦拉曼光谱探测算法具有良好的抗随机噪声能力。
图3 (a)不同球差下扫描间隔对RMSE的影响; (b)不同像散下扫描间隔对RMSE的影响; (c)不同信噪比下扫描间隔对RMSE的影响Fig.3 (a) Influence of axial scanning pitch on RMSE at different spherical aberration; (b) Influence of axial scanning pitch on RMSE at different astigmatism; (c) Influence of axial scanning pitch on RMSE at different SNR
通过以上仿真分析, 可以看出双边拟合共焦拉曼光谱探测方法具有很好的抗干扰能力, 并且可以在较大的轴向扫描间隔上实现高精度定焦, 说明双边拟合共焦拉曼光谱探测方法可以通过使用少量采样点获得焦平面位置, 减小成像所需的时间。
2 实验与结果讨论
根据图1所示的原理构建了共焦拉曼系统的实验验证装置。 激光器选用波长为532 nm固体激光器, 显微物镜数值孔径为0.9, 放大倍率100倍。 物镜驱动器选用PI公司P725-4CD纳米驱动系统, 闭环分辨率为1.25 nm; 二维扫描台选用PI公司P-542.2CD扫描台, 闭环分辨力为0.4 nm。 收集针孔的大小为100 μm; 光谱仪使用天津港东科技有限公司LRS-5型号, CCD选用Andor公司的iDUs 416型号。
以单晶硅为待测样品, 设置光谱的收集时间为0.1 s, 用物镜驱动器带动显微物镜沿轴向对单晶硅样品进行扫描, 物镜驱动器的步进间隔设置为50 nm。 光谱仪采集每步的拉曼光谱并提取各拉曼光谱在520.7 cm-1强度值, 拉曼光谱轴向响应曲线如图4所示。
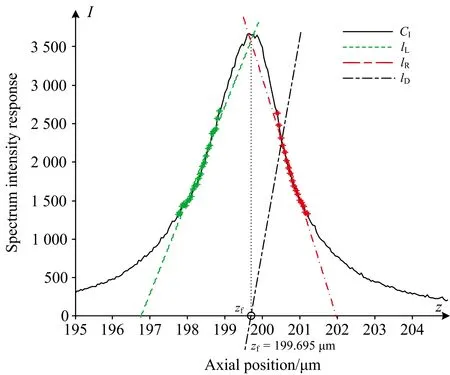
图4 双边拟合的实际拉曼光谱强度轴向响应曲线和聚焦结果CI: 实际曲线; lL, lR: 拟合线;lD: 差分直线; zf=199.695 μm为焦点位置Fig.4 Actual axial response curve andfocusing result of BFSCRM
通过双边拟合算法求得的两条拟合直线相减后所得差分直线lD的过零点zf的横坐标为199.695 μm, 该坐标对应共焦拉曼系统聚焦在样品表面位置时物镜驱动器所在的位置。 为了验证双边拟合拉曼测量方法的轴向定焦能力, 对单晶硅表面同一位置进行了60次重复定焦实验。 其中, 轴向的扫描步距为100 nm, 所得的定焦结果如图5所示。 从图5中可得60次重复定焦的极差为80.2 nm, 标准差为21 nm。
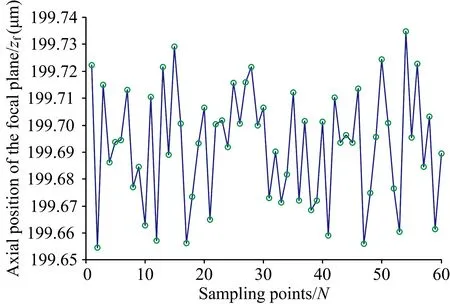
图5 双边拟合定焦方法的定焦重复精度Fig.5 Focusing repetition accuracy of BFSCRM
为了进一步验证双边拟合拉曼测量方法的定焦能力及其对拉曼mapping成像稳定性的改善程度, 测试样品为周期5μm的竖条栅格标准原子力台阶TGXYZ02, 该样品是在硅(Si)衬底上覆盖100 nm不同结构的二氧化硅(SiO2)台阶阵列。 样品在共焦显微镜(LEXT OLS400,Olympus)下观测到的白光图像如图6(a)所示, 其结构的示意图如图6(b)所示。 图6(c)是图6(b)中A点的拉曼光谱, 在实验中, 我们选取520.7 cm-1处硅的拉曼峰进行成像。 设置mapping扫描像素尺寸32×64, 横向扫描间隔为250 nm, 曝光时间为0.5 s。 然后对图6(a)中样品的被测区域B进行扫描。 在进行定焦扫描时, 每4个点进行一次定焦。 实验获取样品拉曼mapping图像如图7所示。
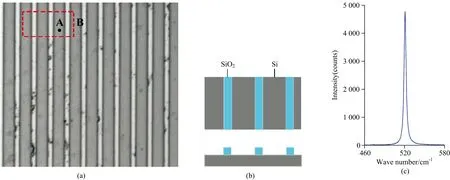
图6 (a)样品显微形貌; (b)图(a)中红色虚线位置放大示意图; (c)图(a)中A点拉曼光谱Fig.6 (a) microscopic observation image; (b) zoom-in the area shown in red area of (a);(c) Raman spectrum of point A in (a)
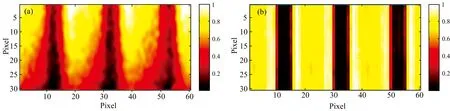
图7 5 μm周期样品的拉曼图像(a): 无定焦系统的拉曼图像; (b): BFSCRM系统拉曼图像Fig.7 Raman images of a vertical bar with a 5 μm period(a): Without auto-focusing; (b): Using BFSCRM
图7(a)是没有使用任何定焦方法所获得的拉曼mapping图像。 图7(b)为双边拟合共焦拉曼光谱探测方法对被测区域进行扫描所获得的拉曼mapping图像。 从图7(a)中可以看出, 在对样品扫描过程中, 由于系统漂移或者振动导致样品被测区域逐渐离焦, 竖条栅格图像的下半部分出现模糊的现象, 导致图像分辨率的下降。 通过图7(b)和图7(a)相比, 可以发现双边拟合共焦拉曼系统获得的竖条栅格图像不会出现逐渐模糊的现象, 图像更为清晰, 而且在容易引入误差的竖条栅格边缘图像更锐利, 且信噪比较高。 实验结果表明, 双边拟合共焦拉曼光谱探测方法能够更好的消除误差变化对定焦结果的影响, 较好地补偿传统共焦拉曼系统因漂移、 振动或表面不平整所导致的样品离焦, 提高了系统的稳定性, 从而保证了成像质量。
3 结 论
提出了一种双边拟合共焦拉曼光谱探测方法, 提高共焦拉曼光谱技术的拉曼成像质量。 该方法利用共焦拉曼光谱轴向响应曲线的斜边对探测点进行定焦处理, 消除了系统离焦对实验结果的影响, 从而确保了系统探测的稳定性。 实验结果表明该方法具有定焦准确、 抗漂移的效果。 随着拉曼光谱应用的深入, 对系统性能的要求也不断增加, 基于双边拟合共焦拉曼光谱探测方法将在微电子和材料科学等领域有更广泛的应用。