飞行器红外图像识别与跟踪算法研究
2021-09-08王华荣
王华荣,刘 霞
(广东科技学院,广东 东莞 523083)
1 引 言
红外空空导弹自问世以来,在发展上已经经历了四代[1],而不同代导弹的主要性能差异均体现在导弹导引头的识别制导上。目前,最先进的第四代红外成像制导导弹其导引头由多元阵列探测器组成,可以在导引头焦平面内对目标的红外特征进行成像,抗干扰能力大幅提升。
由于红外成像制导导弹的出现,红外图像识别跟踪技术迅速发展,国内外的学者对红外图像的检测、识别、跟踪等技术进行了大量研究[2-3]。刘阳对成像弹的目标识别和跟踪算法进行了研究[4],通过对比不同帧图像的特征,将图像中的目标提取并进行跟踪。马惠敏提出了一种用于红外成像制导导弹快速识别目标飞行器的系统[5],可以实现对高速运动的目标进行实时识别。李成对红外成像制导导弹的末端图像识别与跟踪进行了研究[6],选取了高亮区比例、灰度标准偏差、长宽比、紧凑度和复杂度等5个特征量作为目标识别的依据。付晓红对红外成像制导导弹的抗干扰方法和干扰方法进行了研究[7],将导弹的图像识别与跟踪过程分为四个阶段,分别研究每个阶段的干扰方法。
本文对红外成像制导导弹的图像识别与跟踪过程进行研究,建立了飞行器图像识别和跟踪算法,并进行了仿真分析。
2 飞行器红外图像识别算法
导引头的红外阵列探测器接收目标/背景红外辐射,并通过图像处理器对接收到的红外信息进行处理,其处理红外图像的主要流程包括:①图像预处理;②特征提取与选择;③目标识别。导引头的图像处理过程如图1所示。
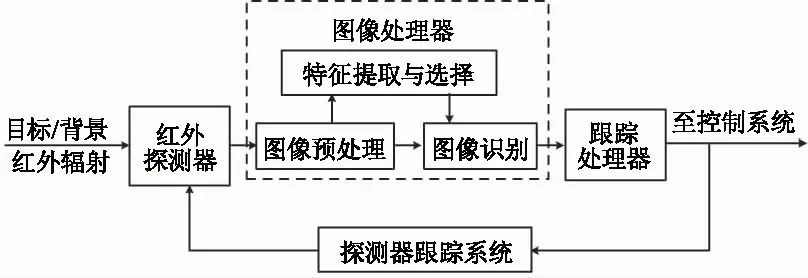
图1 红外成像导引头的基本组成Fig.1 The basic composition of IR imaging seeker
2.1 目标红外图像预处理
红外成像导引头获取的目标飞行器红外图像,不可避免地掺杂了背景噪声和环境杂波,图像的信噪比和对比度都不理想。为抑制背景噪声和杂波,提高图像的信噪比和对比度,必须首先对红外图像进行预处理。红外图像的预处理主要分为图像增强、图像分割以及边缘检测与提取。
(1)图像增强
图像增强技术主要分为变换域增强和空域增强,考虑到实时性和易实现性,本文采用空域增强的中值滤波方法,对获得的飞行器红外图像进行增强处理(文中所有的红外场景图像均来自于课题组自开发的红外软件)[8],如图2(b)所示。图2(a)为飞行器释放干扰弹的原始红外图像,由图2(a)和(b)对比结果可知,图像增强技术将飞行器目标的图像特征凸显了出来,而将环境背景的噪声以及干扰弹的部分图像屏蔽掉。从而大大增加了目标图像被识别的概率。
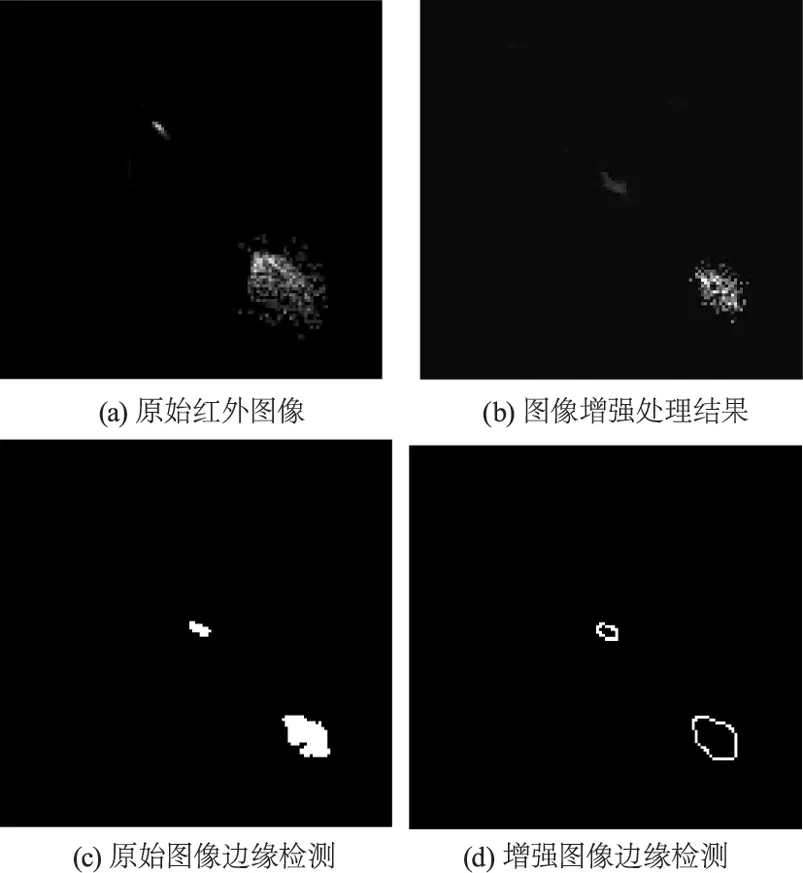
图2 飞行器红外图像预处理过程Fig.2 IR image of air vehicle preprocessing
(2)图像分割
通过将获得的飞行器红外图像分割成若干包含潜在目标的区域,实现目标图像与环境背景的分离[9]。
飞行器在飞行过程中由于蒙皮的气动加热作用,使得其蒙皮温度一般都大于周围环境背景温度。因此,目标图像处于灰度变化较大的区域,且目标一般在红外辐射高亮区。
设导引头获取的红外图像总像素数N=m×n,灰度级为Lg={0,1,…,L-1},灰度值为i的像素点个数ni,则图像的灰度分布直方图的概率分布为:
(1)
设对应图像中的背景为C0,对应图像中的目标飞行器为C1,则二者对应的灰度范围为C0={0,1,…,s},C1={s+1,t+2,…,L-1}。
则C0类和C1类出现的概率为:
(2)
(3)
C0类和C1类的灰度均值为:
(4)
(5)
式中,μ为图像整体灰度均值,其值为μ=ω0μ0+ω1μ1。
μ的标准方差为:
(6)

(7)
由图2(c)处理结果可知,背景噪声完全被屏蔽掉,图中仅剩下目标飞行器和红外干扰弹图像。
对图2(c)中的图像进行Canny算子边缘检测并提取出边缘,结果如图2(d)所示。
(3)边缘检测与提取
目标图像的边缘包含了丰富的特征信息,通过边缘检测与提取可以为后续图像处理提供目标的准确边缘特征信息[11]。文中选择Canny边缘检测算子进行图像边缘检测[12],其边缘检测流程步骤如图3所示。
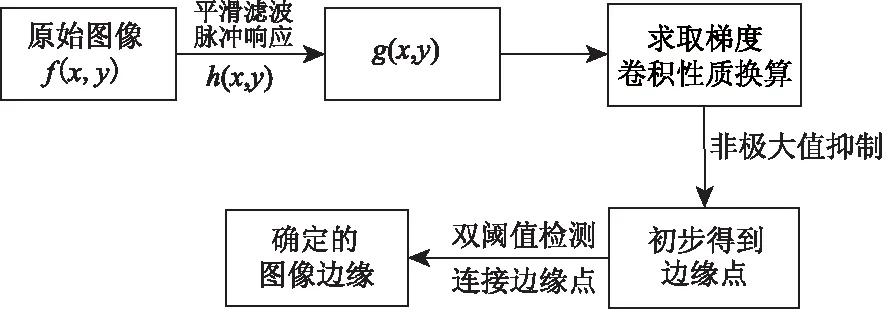
图3 Canny边缘检测的计算流程Fig.3 Calculation process of edge detection
2.2 目标图像特征提取与选择
通过目标图像特征提取可以得到图像中目标的独立可区别特征,但所选的特征必须具有一定的稳定性,且互不相关,所含数据冗余最小,同时具有比例、旋转和位移的不变性等特征。常用的红外图像特征可大致分为:图像灰度特征、纹理特征、图像边缘特征、图像轮廓特征等[13]。
灰度特征是图像中最直观的特征之一,但由于导引头接收到的红外图像易受光照和场景等变化的影响,且需要实时高校检索,因此灰度特征被利用较少。纹理特征能够反映出图像亮度的空间变化情况,但对于空中高速运动飞行器目标,由于观测距离较远,目标和背景的纹理特征十分模糊,因此纹理特征较少应用于成像弹的识别中。而图像边缘特征作为图像的基本底层特征之一,具有不受外界光照变化影响、能够适应局部遮挡的优点,但一般用于目标成像良好、轮廓清晰、对比度强的情况。红外成像制导导弹导引头接收到的图像往往比较模糊,且图像面积较小,边缘特征提取的难度增大。
图像轮廓特征广泛的应用于图像处理和识别中,相比其他图像特征,轮廓特征具有受背景环境干扰较小、实时性高、对图像的分辨度要求低等众多优点,广泛应用于红外成像弹的目标特征提取中。因此文中应用目标的轮廓特征对图像进行提取。由于图像的轮廓特征量较多,首先需要对特征量进行选取,本文选用成像弹最常用的三个特征量进行仿真。
(1)长宽比F1:红外图像中目标区域的最小外接矩形的长宽比值,体现了目标区域的形状特征。表示为:
(8)
式中,a是目标最小外接矩形的长度;b是目标最小外接矩形的宽度。
(2)紧凑度F2:定义目标图像的总像素个数与其最小外接矩形的总像素个数的比值,反映目标的充满程度。表示为:
(9)
式中,Nr为最小外接矩形内的总像素个数;Nin为目标图像像素个数。
(3)周长F3:提取得到的目标图像其边缘像素个数,反映了目标的边缘长度大小。
以上特征量均经过试验检验,能够作为成像弹导引头目标识别和处理的依据。图3为导引头获得的飞行器释放干扰下的红外图像,依据2.1节中的图像预处理算法对图3(a)、(b)进行预处理,得到的特征量如表1所示。
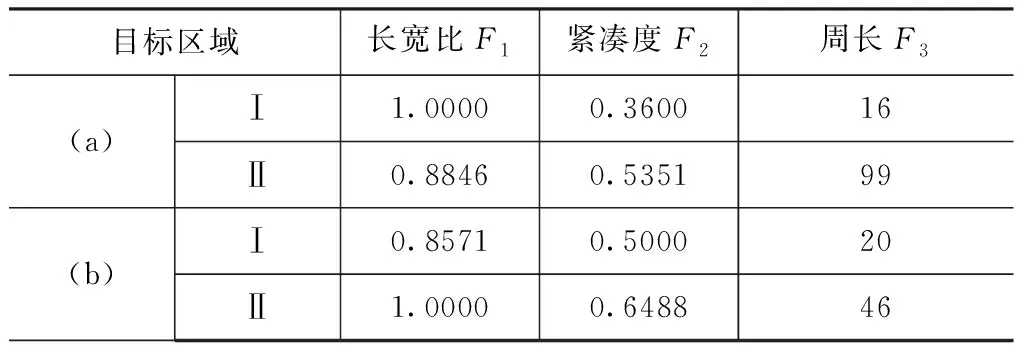
表1 不同目标图像提取的特征量Tab.1 The comparison of characteristicquantities for different images
2.3 目标图像识别
当导引头的视场中出现多个目标图像时,需要对视场中的红外图像进行识别,以区分真假目标。目标图像识别是计算导引头视场内每一个图像与当前跟踪目标相似程度的过程,整个识别过程可以用一个包含目标特征的函数表示,用于确定跟踪目标。
依据2.2节得到的特征量,推导出区别度函数如下所示:

(10)

(11)

设图4为飞行器目标模板,应用文中计算的特征量对图4中的目标进行计算,其计算结果如表2所示。
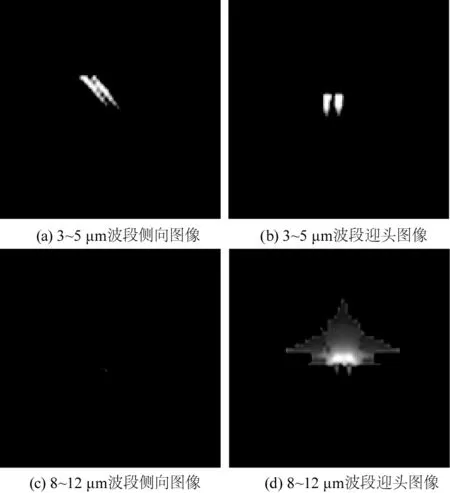
图4 飞行器目标模板图Fig.4 The target templates for air vehicle

表2 特征量计算结果对比Tab.2 The comparison of characteristicquantity computed results
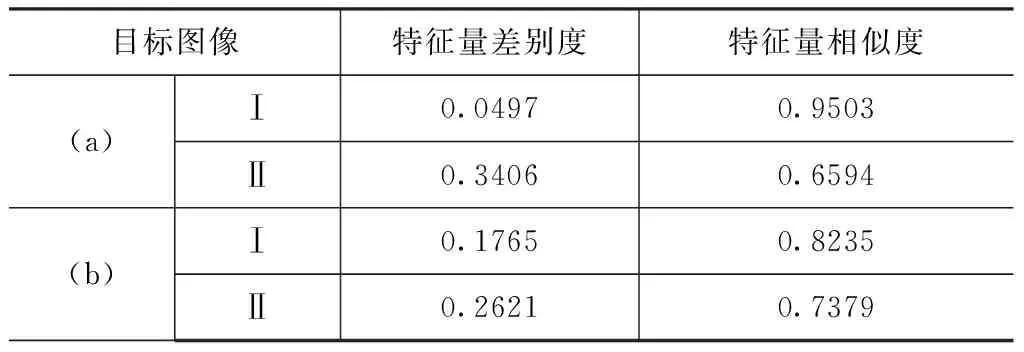
表3 目标图像相似度计算结果Tab.3 The similarity computed results of target image
由表3中的计算结果可知,图3(a)中两个潜在目标区域Ⅰ和Ⅱ与目标模板进行对比,特征量相似度分别为95 %和65.9 %,则识别目标Ⅰ为真目标。图3(b)中两个潜在目标区域Ⅰ和Ⅱ与目标模板进行对比,特征量相似度分别为82.35 %和73.79 %,判断后识别目标Ⅰ为真目标。
3 跟踪算法
红外成像制导导弹一般都具有多种制导跟踪能力,导弹飞行过程中,根据不同阶段的作战态势、目标类型,选择不同的目标跟踪模式。当导弹与目标间距较远时,目标图像在视场中所成像素较少,无法对其进行目标特征提取,一般采用点目标跟踪模式;当目标逐步具有了相对清晰的图像特征时,则可以对目标图像的图像特征进行识别提取,并对识别后的图像进行跟踪。通常采用的跟踪模式为边缘跟踪、形心跟踪以及相关跟踪等几种模式。
3.1 边缘跟踪
边缘跟踪通常选取目标图像上的边缘点,通过设置波门套住此跟踪点,并实现对目标的跟踪。边缘跟踪以两个边缘的中心作为目标位置,其跟踪点坐标为:
(12)
式中,xl(t)、yl(t)为第t个周期目标图像在焦平面的左下侧坐标;xr(t)、yr(t)为第t个周期目标图像在焦平面的右上侧坐标;x0(t)、y0(t)为跟踪点坐标。
3.2 形心跟踪
形心跟踪是指红外成像制导导弹以目标图像的形心作为实际跟踪点[4]。当目标飞行器飞行姿态发生变化时,形心的位置变动较小,因此采用形心跟踪时跟踪比较平稳,且抗杂波干扰能力较强,算法简单,是弹目距离比较近时常用的一种跟踪模式。
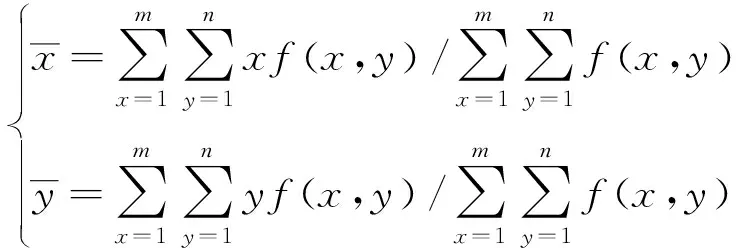
假设图像函数为f(x,y),图像大小为m×n像素,目标边缘共有k个像素点(xi,yi),则目标飞行器形心为:
(13)
当弹目距离较近时,目标成像相对较大,采用形心跟踪。当目标处于均匀的背景中且目标图像信噪比良好时,也可以选取质心作为跟踪点,采用质心跟踪。目标的质心计算式为:
(14)
3.3 波门设置
无论哪种跟踪算法都需要设置波门,波门的设置可以大幅提高导弹的抗干扰能力,提高对目标的跟踪效率。通过设置波门,使得导引头只对波门内的目标图像进行识别处理,对于波门外的辐射予以忽略,从而减少外部干扰、提高跟踪精度。
但当导引头丢失目标后,导引头会由锁定状态转换到搜索状态,释放波门以较大的静态视场角扫描视场搜索目标。波门中心坐标与跟踪点坐标重合,波门半径可以由下式得到:
r=[xr(t)-xl(t)+yr(t)-yl(t)+|xr(t)-xl(t)-yr(t)+yl(t)|]/4
(15)
本文在进行红外成像制导导弹目标跟踪仿真时,当目标具有相对清晰的图像特征时采用形心跟踪模式。根据建立的相似度函数,对目标图像的特征值进行计算,计算识别得到的真目标形心坐标,设置波门,并对其进行跟踪,如图5所示。
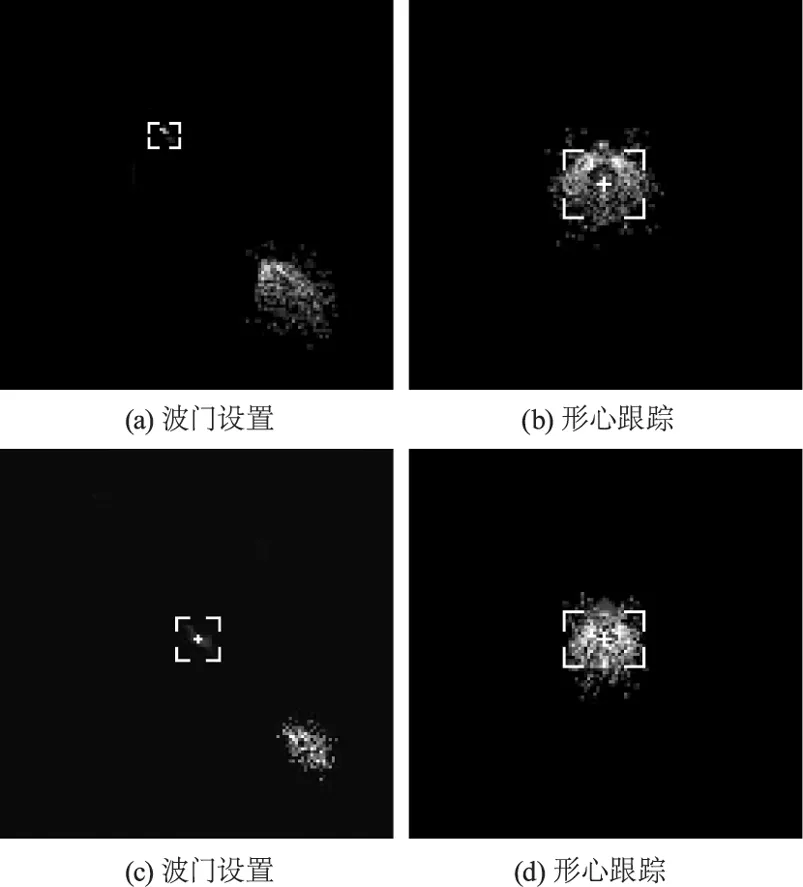
图5 形心跟踪以及波门设置Fig.5 Centroid tracking and wave gate setting
4 仿真结果与分析
4.1 飞行器平飞仿真结果
设飞行器保持水平直线飞行,其正后方2 km处有一枚红外成像制导导弹对其进行跟踪。分别仿真飞行器不释放干扰和释放面源型红外干扰弹时,导引头的图像识别和跟踪过程,如图6和图7所示。
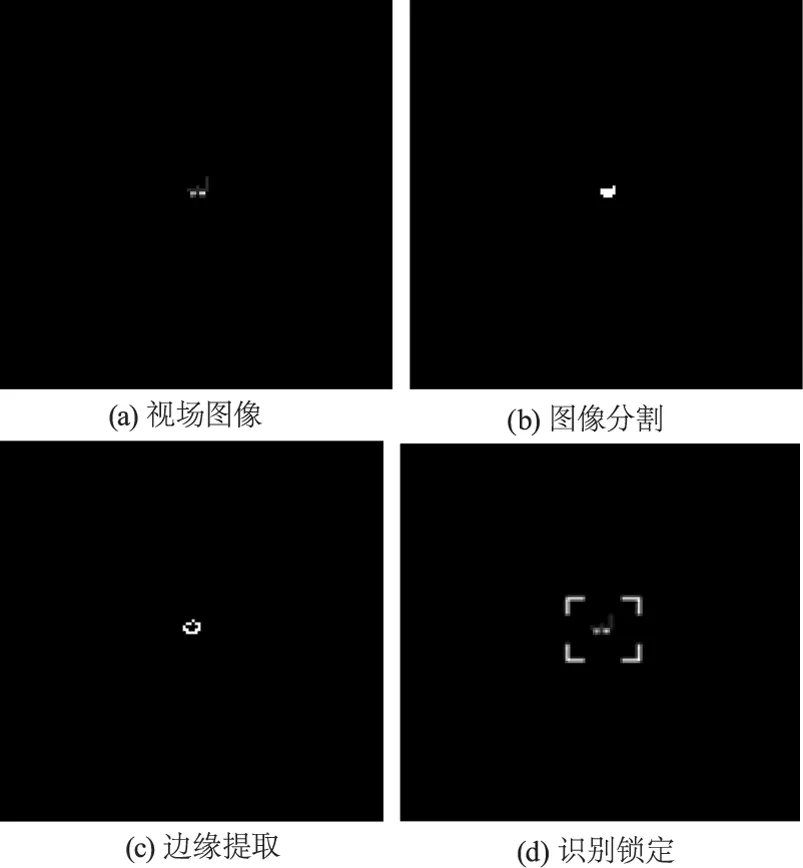
图6 无干扰时导引头图像识别过程Fig.6 The image recognition processes for seeker without decoy
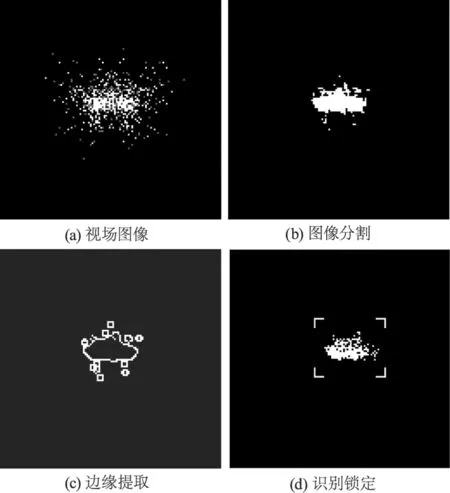
图7 连续释放干扰弹时导引头图像识别过程Fig.7 The image recognition processes for seekerwhen decoys are launched continuously
由图6的仿真结果可知,目标不释放干扰,此时在导引头视场内只存在飞行器图像这一个目标,因此导引头通过图像识别后将其锁定,并设置波门进行跟踪。图7的仿真中,尽管飞行器连续的释放了多枚干扰弹,但是由于其保持水平飞行,导引头焦平面内接收到的红外图像中飞行器图像与干扰弹重合在一起。导引头经过图像识别处理后,干扰弹四周不连续的图像被剔除,将干扰弹和飞行器相重合的中心图像作为真目标,并设置波门对其跟踪。
4.2 飞行器做桶滚机动仿真结果
红外成像弹虽然具有极强的抗干扰能力,但是飞行器通过选择合理的机动配合红外干扰弹仍然能够将其成功干扰。
设目标飞行器做防御型桶滚机动,同时连续释放干扰弹,成像弹在飞行器尾后2 km处。仿真导引头的图像识别和跟踪过程如图8和图9所示。
由图8可知,弹目距离2 km时,目标飞行器的红外特征已经非常明显,此时导引头已经记忆了目标机的红外图像信息并将其牢牢锁定。在干扰弹释放0.1 s内,干扰弹红外图像与飞行器的红外图像没有分离,因此导引头将飞行器和干扰弹相重合的图像认为是真目标,并记忆其图像特征。图9的仿真结果可知,0.3 s时刻,干扰弹与飞行器的图像逐渐分离,导引头提取目标图像的特征,通过公式(10)计算各图像的相似度,计算结果得出干扰弹核心区域的红外图像与模板目标的相似度最高,因此导引头将干扰弹锁定,并设置波门对其进行跟踪,飞行器成功摆脱跟踪。
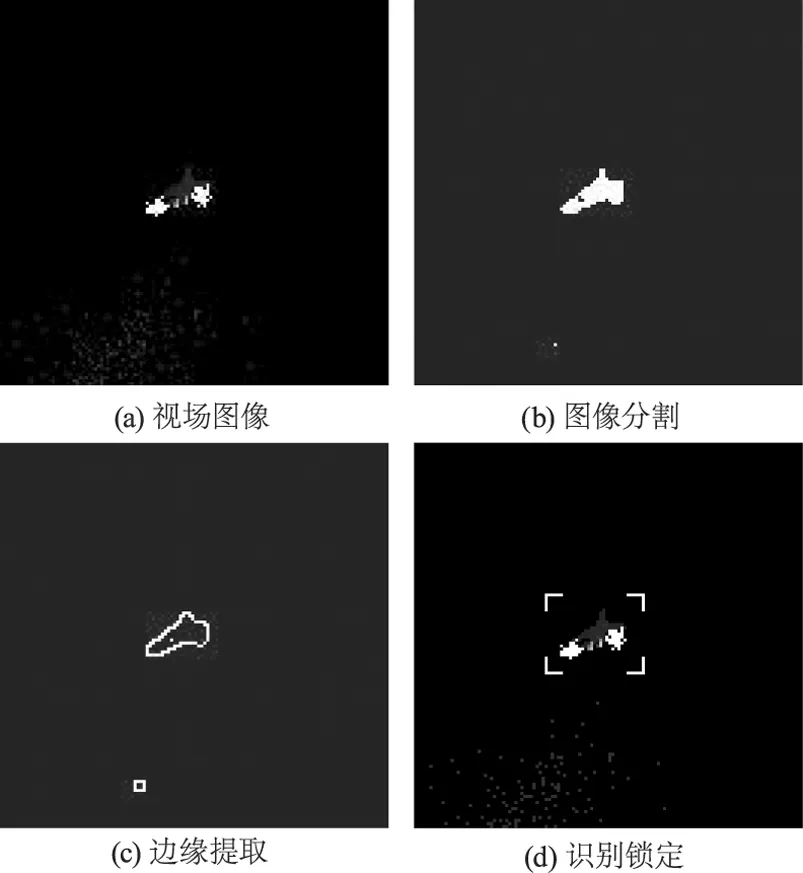
图8 干扰弹释放0.1 s时刻导引头图像识别处理过程Fig.8 The image recognition and treating processesfor seeker at 0.1 s when decoy is launched
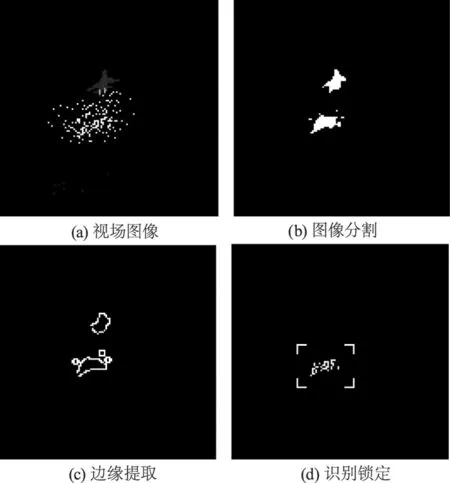
图9 干扰弹释放0.3 s时刻导引头图像识别处理过程Fig.9 The image recognition and treating processesfor seeker at 0.3 s when decoy is launched
由图7~图9的仿真结果可知飞行器不做机动时不能将导弹成功干扰,而采取桶滚机动并释放干扰时,可以将导弹成功干扰,这一结论与导弹的真实性能保持一致[14-16]。
5 结 论
本文对红外成像制导导弹的图像识别以及图像跟踪算法进行了建模研究。重点分析了导弹的图像识别跟踪机理,对导弹的图像识别和跟踪各流程分别建立相应的算法模型,模型的建立满足导弹的实时性和可信性要求。并应用提出的算法,对导引头接收到的红外图像进行了相应的图像处理与跟踪仿真;最后,分别仿真了飞行器平飞以及采取桶滚机动并释放干扰弹时,导引头的图像识别跟踪过程,真实的还原了导弹的图像识别跟踪过程,所得到的结论与导弹实际一致。
