应用于无人驾驶车的激光雷达雪天去噪方法研究
2021-09-08钟科娣刘元盛
钟科娣,刘元盛,张 军,路 铭
(1.北京联合大学 北京市信息服务工程重点实验室,北京 100101;2.北京联合大学机器人学院,北京 100101;3.北京联合大学应用科技学院,北京 100101)
1 引 言
近年来,无人驾驶技术的快速发展促进了传感器技术的发展。激光雷达传感器以其高精度和高可靠性的特点而广泛应用于无人驾驶车辆中,其工作原理是通过旋转发射激光束,扫描周边三维空间范围内的物体实际位置,并将反射点以点云的信息存储起来。通过分析激光雷达的点云数据,可实现障碍物检测、位姿估计、点云地图建立等功能,为无人驾驶车辆提供必要的感知信息。由于激光雷达自身的缺陷或外部环境因素的影响,激光雷达的点云数据会包含一些不可忽视的噪声,从而影响到激光雷达的检测性能[1-3]。为了消除噪声造成的不利影响,研究人员通常采用滤波算法对激光雷达数据进行预处理,达到滤除噪声的目的。针对点云噪声的分布特点,前人已经研究出许多有效的去噪算法。这些去噪算法按空间分布可分为二维空间去噪算法和三维空间去噪算法。
二维空间去噪算法的应用范围为相机图像的噪声去噪,处理目标为二维空间数据,如用于处理边缘细节和噪声的滤波方法[4-5],以及通过自适应形态学滤波抑制噪声和杂波信号的检测方法[6],而激光雷达点云是三维点云,在使用二维去噪算法进行去噪前需将三维点云转换到二维空间后再进行去噪处理。常规的转换方法是将一帧激光雷达点云投影到图像上,其中激光扫描点代表图像像素,点到传感器的欧氏距离代表像素值,将激光雷达点云数据图像化后再通过二维空间去噪方法进行降噪处理[7-8]。
三维空间去噪算法可直接处理激光雷达点云,进行点云去噪处理。Jenke等人提出了基于贝叶斯曲面重建的方法[9],通过贝叶斯规则创建一个分布模型去估计点云的分布和重建,在降噪的同时保持了点云的分布和结构。敖建锋等人有针对性的应用多种滤波方法和格网插值方法提取信息,获取高质量的基础数据[10]。张芳菲等人针对孤立噪声点,使用k-d树处理点云数据得到有序点云,统计噪声点与近邻点的正态分布特性,自适应计算去噪的阈值,对点云中孤立的噪声点具有较好的去噪效果[11]。
常规的点云噪声都有相对应的降噪算法处理并且都具有较好的去噪效果,但对于一些特殊场景中的噪声,常规的去噪算法的去噪效果较差。如在降雪场景中,雪花飘落时充斥在整个三维空间内,其反射的点云数据极易造成误检,故激光雷达点云必须要经过去噪处理才能可靠的使用。雪花噪声在激光雷达的近距离处密度大,而随着距离的增加,雪花点的密度也逐渐降低,这些特性使得雪花具有不同于传统点云噪声的独特噪声分布,需要专门的去噪方法进行滤除。
为了更好地解决雪花噪声影响的问题,本文采用了点云反射强度和邻域搜索组合的去噪方法。反射强度是激光雷达扫描到物体时返回的脉冲回波强度的测量指标,并且在常规场景中不同的物体具有不同的反射强度,可根据反射强度实现物体的识别分类。但仅通过反射强度对物体进行识别分类则会出现漏检误检的情况,比如在目标物体与其他物体具有相同的反射强度时不能精确识别分类。基于邻域搜索的方法可通过定义邻域,验证邻域内点云的分布属性,达到识别分类的目的。但邻域搜索的方法在雪天去噪的时不能保证环境特征的质量。为此提出了基于反射强度和邻域搜索的组合方法,在提高去噪效果的同时,减少环境特征的损伤,为无人驾驶车辆的安全行驶提供优质的环境特征。
2 点云数据识别分类方法描述
2.1 基于激光雷达反射强度的识别分类
激光雷达数据包含了物体在三维空间的位置信息,也包含了目标物体的反射强度等信息[12]。反射强度是反映目标物体的重要的物理量,根据不同材质物体有不同的反射强度,激光雷达的反射强度可用于区域划分和物体识别分类[13]。激光雷达扫描到物体时返回的反射强度范围为1~100。在实验中为了获得雪花反射强度和环境特征反射强度的分布模型,对单帧点云数据进行统计分析。点云反射强度的分布模型可分为两个步骤:第一步是对纯雪花点云反射强度分析,通过提取雪花点云数据统计分析,得到雪花点云的反射强度分布模型。第二步是对环境特征的反射强度分析,通过晴天的激光雷达数据统计分析,得到环境特征的反射强度分布模型。在降雪场景中,积雪覆盖会对环境特征的反射强度分布模型造成影响,所得到的强度分布模型不能准确反映环境特征物的强度分布。故在统计环境特征物体的强度时采用晴天采集的激光雷达数据。针对晴天和降雪天气场景,从采集的数据中各随机抽取20帧数据统计分析,得到的激光雷达数据的强度分布,如图1所示。通过验证可知雪花的反射强度值在1~8的范围内,环境特征物体的反射强度为2~50,环境特征的反射强度在低强度处分布较少,当强度大于45时,统计到的激光点数较少,可根据得到的反射强度分布对物体进行粗识别分类。若在降雪场景中仅通过反射强度对物体识别分类,会受到积雪覆盖或部分与雪花具有相同反射强度环境特征的影响,在识别分类上具有单一属性不可靠的局限性。
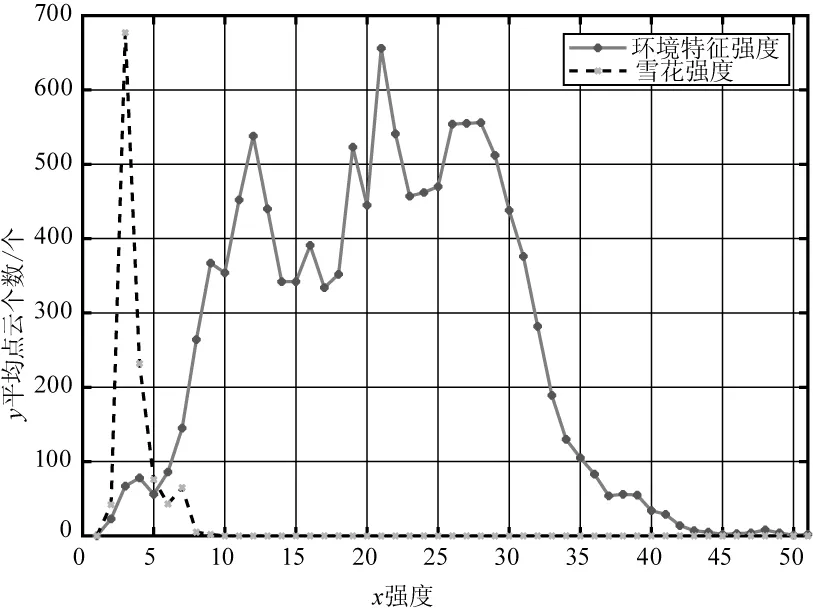
图1 点云反射强度分布Fig.1 Reflection intensity distribution of point cloud
2.2 基于邻域搜索算法的识别分类
邻域搜索算法的本质是通过迭代搜索目标点的邻域,获得局部最优解。邻域搜索的关键是邻域的确定,即如何定义邻域。邻域搜索中的动态半径离群点滤波器(DROR,Dynamic Radius Outlier Removal Filter)主要基于空间分布的规律进行识别分类,通过确定搜索半径来定义邻域[14]。搜索半径通过联合目标点到传感器的欧式距离与激光雷达的水平分辨率的关系获取。以目标点为圆心,结合搜索半径共同定义搜索邻域,并根据搜索邻域内点云数对目标点识别分类。当激光点到传感器的距离小于设定的最小的搜索半径(SRmin),则以SRmin为搜索半径进行邻域搜索。DROR的优点是通过动态变化的搜索半径定义搜索邻域,适应了激光雷达扫描点随着距离增加而减少的特性。DROR示意图如图2所示,联合计算点到激光雷达的欧式距离和激光雷达水平分辨率获得搜索半径,从而确定以点为圆心,半径为SR的圆形区域,散乱分布的点为激光雷达的扫描点,l为激光束在k时间内的变化位置,l1、l2为相邻时刻的激光束,α为激光雷达的水平分辨率,η平面为t时刻内激光束的扫描平面。DROR的局限性在于不能保持较好的去噪效果的同时保留较好的环境特征质量。
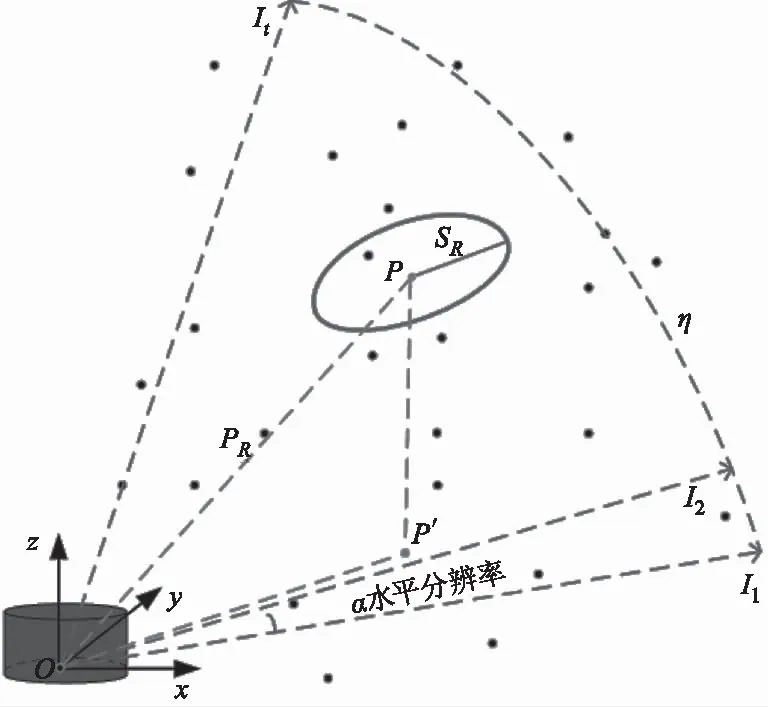
图2 DROR示意图Fig.2 DROR diagrammatic sketch
3 基于反射强度与邻域搜索组合的滤波算法
通过第二章对反射强度和邻域搜索的介绍,可知单独使用这两种方法在对雪花噪声去噪时都存在自身的局限性,对雪花噪声的去噪效果较差。为降低雪花噪声对激光雷达检测产生的影响,可将两种方法组合互补,从而获得更加精准的分类识别点云,提高算法的去噪性能和环境特征质量保留。
本文提出基于激光雷达反射强度与邻域搜索组合的滤波算法,主要分为两个步骤,第一步是对激光雷达点云反射强度统计分析,将带噪声的点云进行粗识别分类。其中,对经过统计得到的激光雷达点云反射强度,通过最小类内方差法粗识别分类,得到非雪花点云和雪花点云,并将非雪花点云排除,不参与后续的点云处理,为下一步邻域搜索的识别分类提供一个较好的初始点云。第二步是通过邻域搜索的方法进行精准识别分类。通过搜索邻域内点云的数目,完成点云识别分类,将雪花精确识别分类并滤除。基于反射强度和邻域搜索算法的组合算法,针对降雪场景中雪花噪声分布的去噪问题,具有比较好的效果。基于激光雷达反射强度和邻域搜索的组合滤波算法去噪示意图如图3所示。
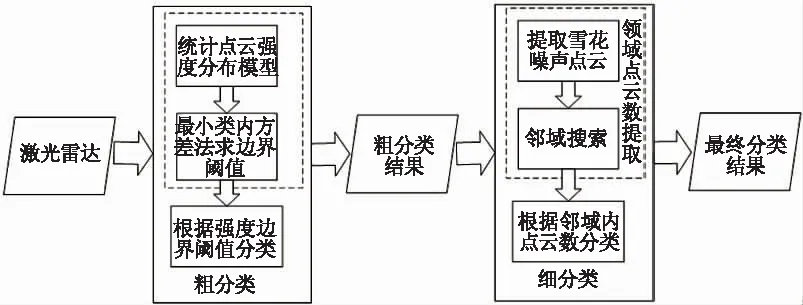
图3 雪花噪声去噪示意图Fig.3 Snow noise denoising diagram
基于激光雷达反射强度的粗识别分类的动态边界阈值通过最小类内方差法获取。最小类内方差法是图像中一种常用的阈值分割方法,也适用于激光雷达数据反射强度边界阈值分割。将激光雷达点云数据有序化,获得数据点个数N,统计数据点云反射强度的分布概率,如表1所示。

表1 激光点反射强度的概率分布Tab.1 Probability distribution of laser pointreflection intensity
式(1)表示所有强度等级的概率和为1:
(1)
激光雷达数据的总个数为N,反射强度为i的点个数为ni,则反射强度为i的点概率pi为:
(2)
通过最小类内方差法统计反射强度时,若在等级强度为Tk时取得动态边界阈值,可根据动态边界阈值Tk划分点云为两个点云A、B,若A∈{1,2,…,Tk},B∈{Tk+1,Tk+2,…,Tm},点云A标记为雪花点云,B标记为非雪花点云,则目标点属于雪花点云A或属于非雪花点云B的概率分别为η1、η2:
(3)
(4)
式(5)、(6)表示雪花点云A的反射强度等级的均值μ1和方差σ1分别为:
(5)
(6)
式(7)为计算雪花点云A的反射强度等级为i时点的概率P(i|A):
(7)
式(8)、(9)表示雪花点云B的反射强度等级的均值μ2和方差σ2分别为:
(8)
(9)
式(10)计算雪花点云B的反射强度等级为i时点的概率P(i|B):
(10)
式(11)表示点云A、B类内方差公式:
(11)
通过迭代的方式使得方差函数F(Tk)取得最小,即满足min|F(Tk)|,1≤Tk≤Tm时,可获得基于反射强度的动态边界阈值Tk。动态边界阈值Tk对激光雷达原始点云进行粗识别分类,当动态边界阈值大于激光雷达点云数据强度pj时,即Tk>pj,则将该点标记为雪花点,否则标记为非雪花点。根据反射强度分割的点云是一个粗分类的过程,为了提高精确的点云分类,将经过反射强度处理后的非雪花云作为邻域搜索的输入数据,对该点进行邻域搜索。当邻域搜索的点云数的值大于设定的最小点云数,即k>kmin时,标记该点为非雪花点,否则标记为雪花点。最后将标记为雪花的点云滤除,获得环境特征点云,实现雪花噪声的去噪。基于反射强度和邻域搜索组合算法的流程如图4所示。

图4 基于反射强度和邻域搜索组合算法流程Fig.4 Algorithm flow based on reflection intensityand neighborhood search
4 实验结果与分析
本文算法通过RS-Bpearl 32线激光雷达采集的数据进行验证,硬件设备为Inteli 7处理器,16 GB内存电脑,系统环境为Linux的机器人操作系统(ROS,Robot Operating System)。在实验验证中所用到的激光雷达数据源自北京联合大学校区采集的实际激光雷达点云数据,分为降雪和晴天两种场景,总帧数均为3000帧,采集数据的路线均为同一环境,如图5(e)所示。对以上场景的数据通过验证统计离群点滤波器、半径离群点滤波器和动态半径离群点滤波器等不同的点云滤波器在降雪场景的雪花去噪效果,并与本文的方法相对比。
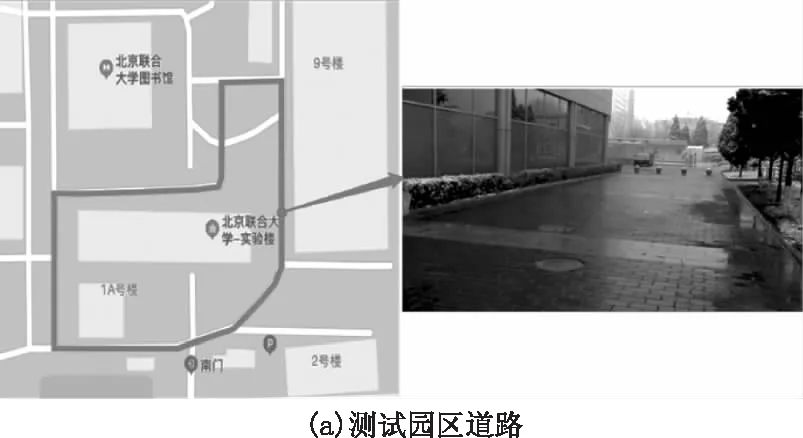
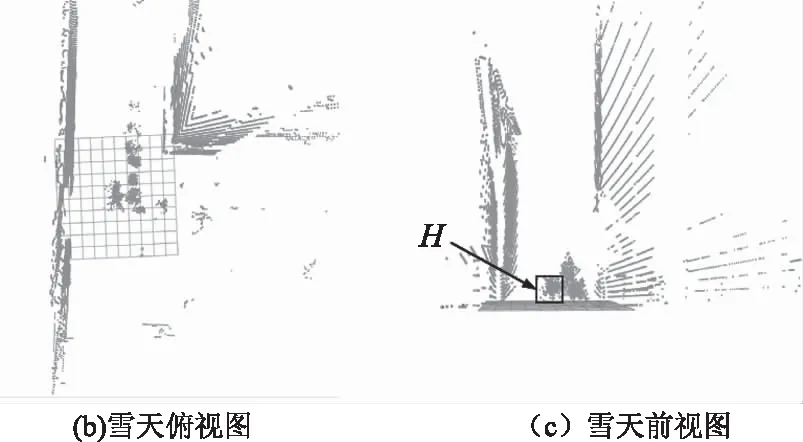
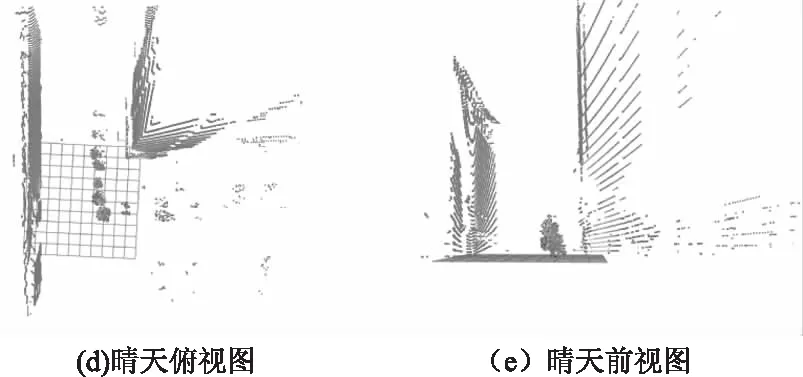
图5 原始点云Fig.5 Original point cloud
如图5中,(a)为实际道路场景和数据采集路线图,且道路两边有建筑物、植物和车辆等环境特征。(b)为雪天场景原始点云俯视图,(c)为前视图;(d)为晴天场景原始点云俯视图,(e)为前示图;对比图4的(b)与(d)、(c)与(e)可知标记的区域H是激光雷达检测到的雪花噪声。在该段时间内,激光雷达检测到单帧数据中降雪量的变化,如图6所示。该变化趋势可作为降雪量变化的参考量,并且可根据降雪量的变化验证算法在降雪场景的去噪效果和稳定性。
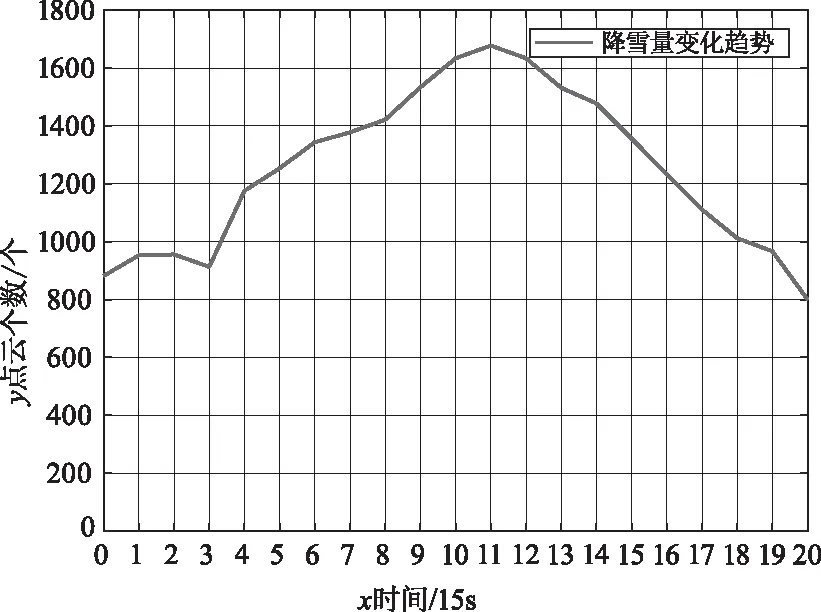
图6 降雪量变化趋势Fig.6 Variation trend of snowfall
通过实验结果验证,本文提出的反射强度和邻域搜索算法的组合算法是可行有效的。实验结果验证分为两步分进行,第一步是对环境特征质量保留的验证,验证算法对环境特征质量的保留效果。第二步对雪花噪声分析,验证本文算法对雪花噪声的去噪效果。通过实验和数据分析,定性与定量的分析本文算法与常规滤波器的去噪性能。
4.1 实验结果
统计离群点滤波器:统计离群点滤波器首先通过(SOR,Statistical Outlier Removal Filter)迭代点云中的每个点,并计算到其k个最近邻点的距离的平均值和标准差。该滤波器遍历所有点,并删除到其k个邻居的平均距离大于阈值的点。统计离群点滤波器应用于降雪场景时,可以达到将离散的雪花噪声滤除,但是对于密度大的雪花噪声的滤除效果较差,该滤波器的滤除效果如图7所示。
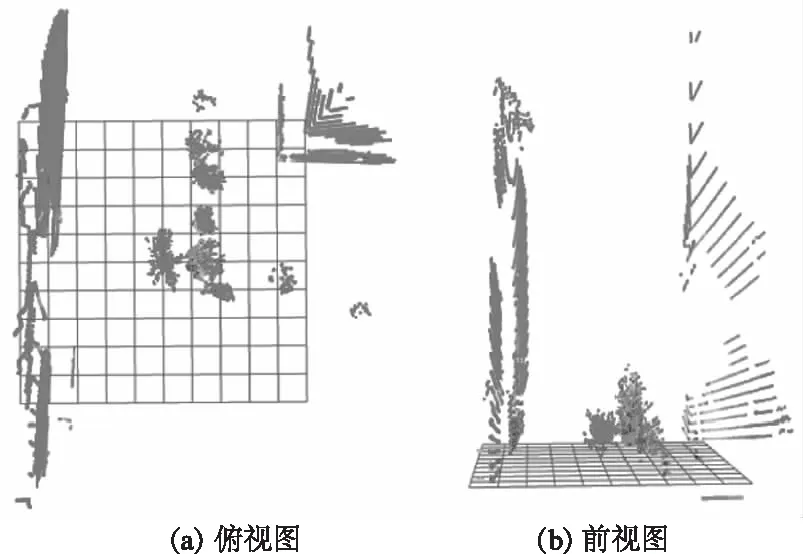
图7 SOR滤波器Fig.7 SOR filter
半径离群点滤波器:半径离群点滤波器(ROR,Radius Outlier Removal Filter)遍历点云中的每个点,并计算在设定搜索半径R内找到的点云数[16]。若搜索到的点云数小于设定的最小点云数,则该点被移除。该滤波器的搜索半径是固定不变的,当搜索半径足够小时可以达到较好的滤除效果,但是,在去噪的同时会严重损伤环境特征的质量。当搜索半径R=0.05时,可以滤除较多的雪花噪声,但密度大的一簇雪花噪声没有滤除,去噪的效果如图8所示。
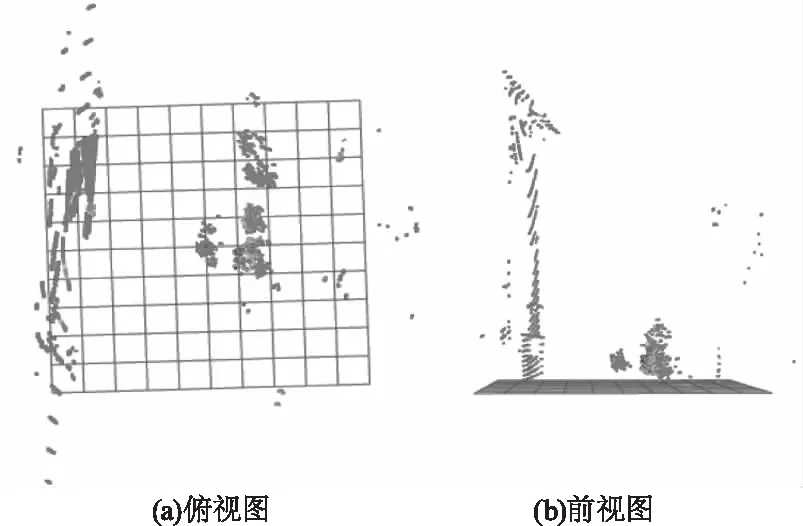
图8 ROR滤波器Fig.8 ROR filter
动态半径离群点滤波器:该滤波器考虑了激光雷达扫描点距离越远越稀疏的特性,为每个扫描点定义了一个动态变化的搜索半径,进一步解决了远距离损害环境特征质量的难点[15]。去噪性能与半径滤波器相比,该滤波器在总体效果上有了一定的提升,但是密度大的一簇雪花噪声仍然存在,没有滤除,其去噪效果如图9所示。
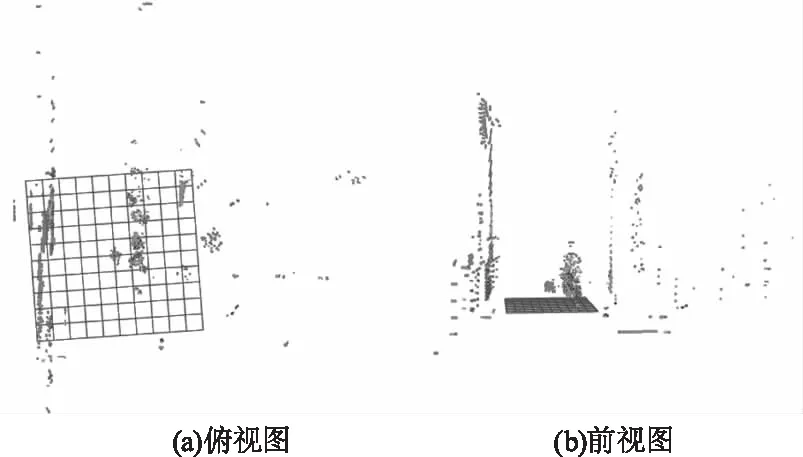
图9 DROR滤波器Fig.9 DROR filter
本文方法:本文方法是基于反射强度与邻域搜索组合的算法,首先通过反射强度的粗滤波后为邻域搜索提供一个较好的初始点云,再通过邻域搜索方法将雪花噪声识别滤除,去噪的效果如图10所示。
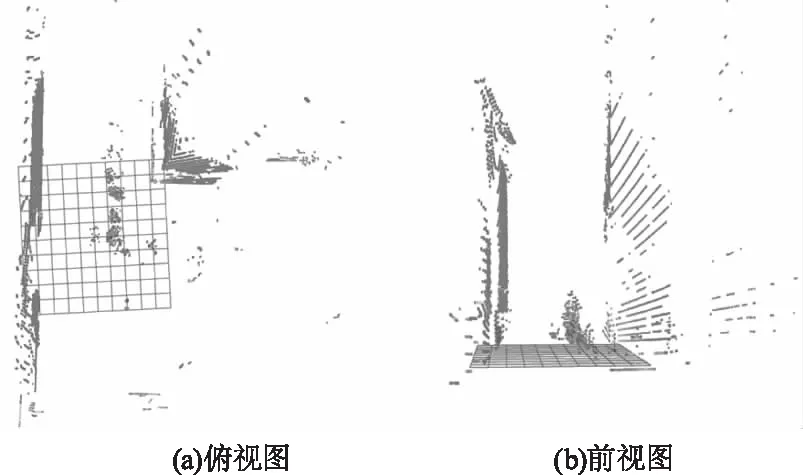
图10 本文方法滤除效果Fig.10 the filtering effect of this method
滤波器参数如表2所示。
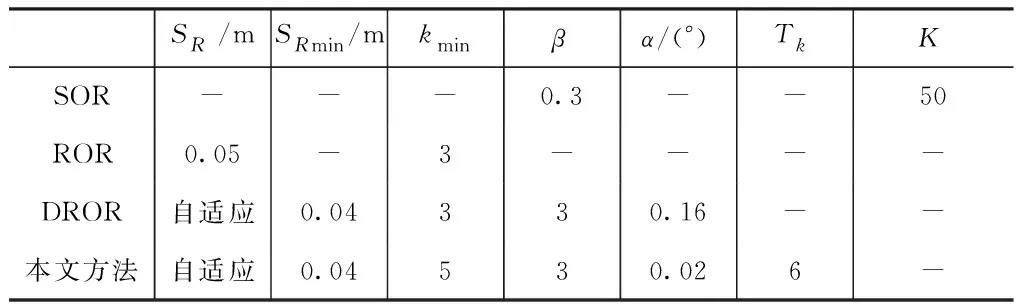
表2 滤波器参数Tab.2 Filter parameters
4.2 实验分析
实验验证的数据采集于校园道路,故只对距离激光雷达20 m范围内的数据展开分析,检测范围可满足无人车的安全行驶。针对单帧激光雷达点云数据的去噪性能和保留环境特征性能进行分析,图11展示了本文算法与常规滤波器对环境特征质量保留的结果。从整体来看,本文方法在20 m范围内的环境特征保留效果仅次于SOR滤波器。虽然SOR滤波器保留环境特征的效果最好,但是雪花噪声去噪性能最差,只将局部离群的雪花噪声滤除,不能滤除密度大的雪花噪声,如图12所示。
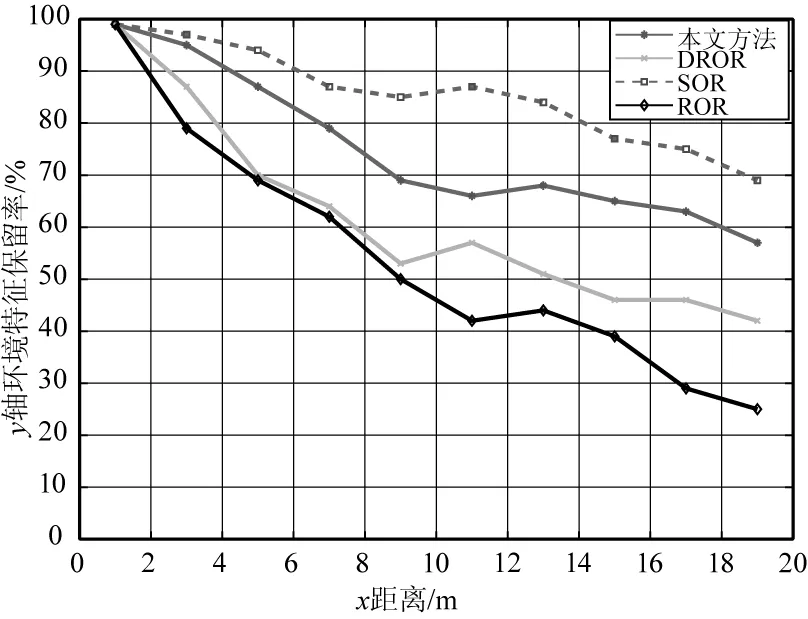
图11 环境特征保留Fig.11 Preservation of environmental features
本文算法对雪花噪声去噪的效果如图12所示。从3000帧数据中均衡抽样100帧数据进行统计分析,本文算法在该时间段内降噪效果处于96 %左右,DROR算法的去噪效果为88.5 %,提高了约8 %。本文方法滤除率的波动幅度不超过1 %,而DROR在降雪量发生变化时滤除效果波动比较大,波动范围为3 %。ROR滤波器的去噪效果比DROR的效果差,而SOR滤波器降噪效果在20 %左右,去噪效果最差。常规的滤波器对雪花噪声去噪时具有局限性,不能达到去噪的同时保留环境特征质量的目的。
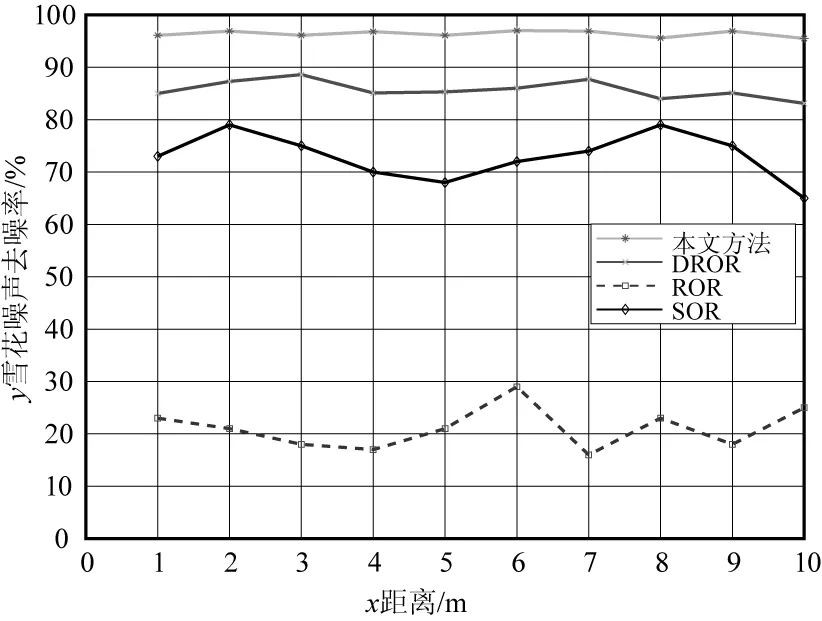
图12 平均滤除率Fig.12 Average filtration rate
本文方法结合了激光雷达扫描点的强度信息,在雪花噪声去噪和环境特征保留上都具有很大的改善。与DROR滤波器相比,本文方法在进行粗识别分类时分割出局部的环境特征,所以在环境特征保留上具有更好的效果,同时通过改变给定点云数提高对雪花噪声的滤除。
5 结 语
针对降雪场景中雪花噪声造成激光雷达的误检的问题,提出了一种基于激光雷达反射强度与邻域搜索组合滤波算法。该方法充分利用了点云反射强度和噪声点云空间分布的特点,实现了降雪场景中雪花噪声的滤除,有效的解决了雪花噪声引起的影响的问题。在降雪场景采集的真实数据验证下实验结果表明:与常规的去噪算法相比,其雪花噪声去噪率和环境特征质量皆得到了提升,雪花噪声去噪率由88.5 %提升至96 %,且具有较好的稳定性;在达到去噪目的的前提下,环境特征质量的保留效果皆优于其余方法。本文方法能够降低降雪场景中激光雷达的误检率,满足无人车所需的高精度、高可靠性的环境感知信息。下一步的工作重点则是继续对算法进行优化,提高实时性以及去噪效果,同时对降雨等天气进行去噪效果评估。
