多足行走装置结构设计
2021-09-03王玲杨彦宏谢藏锋李达
王玲 杨彦宏 谢藏锋 李达
摘要:一款针对户外环境复杂,需要摄像取景,或地震等灾难红外线探测的多足行走产品。人们对野生户外环境比较感兴趣,经常去探险或拍摄景象,地震等灾难发生,现场环境恶劣,人们需要了解情况,探测生命迹象。这款产品旨在提供一种智能的户外红外线摄像和探测观察装置,帮助人们对户外复杂环境和黑暗环境,需要摄像景象,或地震等灾难发生后,红外线探测查找生命的装置。
关键词:多足行走装置;红外线摄像;探测观察;结构设计
1技术背景
中国是世界上自然灾害最严重的少数几个国家之一。害种类多,发生频率高,灾情严重。中国位于欧亚、太平洋及印度洋三大板块交汇地带,新构造运动活跃,地震活动十分频繁,大陆地震占全球陆地破坏性地震的1/3,是世界上大陆地震最多的国家。
高原区域因地质构造复杂,滑坡、泥石流、山体崩塌等地质灾害频繁发生,比如四川省位于地球的地震带,经常发生地震,居民的房屋倒塌,财产损失,生命受到威胁。2010年4月14日,青海省玉树藏族自治州玉树市发生6次地震最高震级7.1级,地震造成2698人遇难。2015年8月12日22时51分,位于天津市滨海新区天津巷的瑞海国际物流有限公司危险品仓库发生火灾爆炸事故。造成165人遇难(其中参与救援处置的公安现役消防人员24人、天津港消防人员75人、公安民警11人。2017年8月8日四川省北部阿坝州九寨沟县发生7.0级地震,地震造成25人死亡(其中24名遇难者身份已确认),525人受伤,6人失联,176492人(含游客)受灾,73671间房屋不同程度受损(其中倒塌76间)。
各种灾难发生后,摇摇欲坠的房屋,某些工业厂房倒塌,辐射物泄露等等。于是,各种救援探测机器人纷纷诞生,如,日本的蛇型机器人,美国的履带机器人,都是为适应各种恶劣环境而设计。一款针对户外环境复杂,需要摄像取景,或地震等灾难红外线探测的产品,是仿生海胆救援探测机器通过伸缩部分关节,跨过障碍物,或是穿越狭小空间,深入到救援人员难以进入的废墟下进行生命探测,分析有无伤亡人员存在。无线球形高清防暴摄像头,适应各种恶劣环境,适应于具有II A.II B.II C類可燃性气体引燃温度组别为 T1-T6组的1区.2区.可燃性气体或蒸汽与空气形成的爆炸性混合物的场所,也适用于引燃温度组别为T1-I6组的20区.21区.22区.含有可燃性粉尘混合物的场所例如:石油、化工、军事基地、医药、科研、钻井平台、粮食加工储存.......
2多足行走装置结构设计
多足行走装置,是一种户外红外线摄像和探测观察的装置,有效克服现有的户外摄像和灾难红外线探测装置的品种少,移动受限,形态难以适应复杂和恶劣的环境,使用不方便。
(1)多足行走装置所采用的技术方案:提供一种智能的户外恶劣环境高清摄像,帮助人们在户外复杂环境,需要摄像或取景;或地震等灾难发生后,复杂恶劣的环境中红外线探测查找生命迹象的装置。
(2)功能与材质:针对户外环境复杂,需要摄像取景,或地震等灾难红外线探测查找的产品,一种户外红外线摄像和探测观察多足行走装置,分为如下四个部分:一套越障驱动滚动行走机构,即带可伸缩刺足的多足行走装置;透明材质的环体,承载电机、控制器和高清微型安防红外线夜视摄像头等内部结构;一套平地行走机构,以及一个遥控装置。多足行走装置,环氧树脂材料,透明,呈两个半圆形态,上面规律地排布着多组可伸缩刺足;通过两个深沟球轴承,与带刺足透明材质的环体螺栓连接为一个整体,呈仿生海胆形态;透明环氧树脂材质的环体,承载电机、控制器和高清微型安防红外线夜视摄像头等内部结构;一套平地行走机构,结构设计重力偏心,由于重力作用,正常状态下,可以保证装置的朝向与位置,红外感应及万向轮控制,可以行走和改变方向;一套双驱动与多足行走器连接,实现复杂地形的滚动行走,足顶吸盘设计,防跌落,近似点接触,越过障碍,实现户外恶劣环境摄像取景或灾难发生后,恶劣环境红外线探测生命的目的。
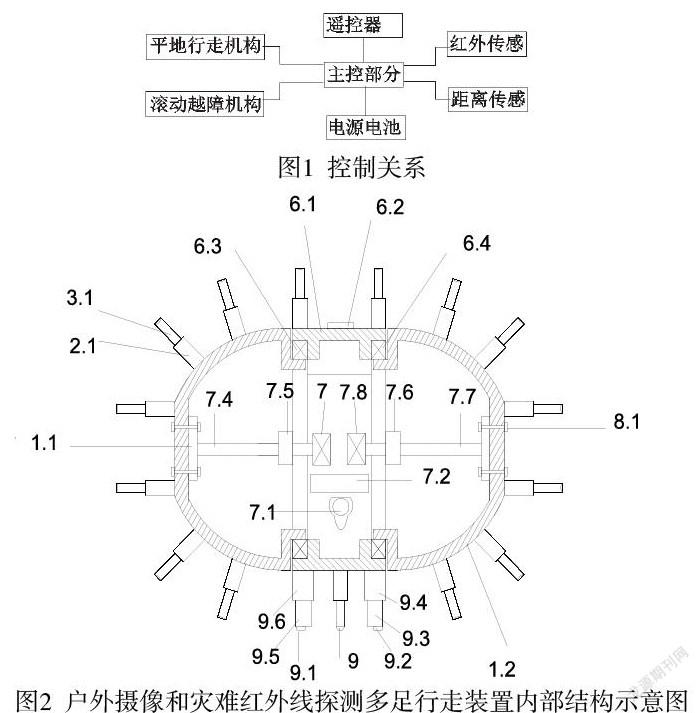
(3)结构设计:本户外摄像和灾难红外线探测多足行走装置,遥控器近程和远程控制(如图1),其结构包括:多足行走装置,几组可伸缩刺足,透明环体,深沟球轴承,两组驱动电机,联轴器,高清微型安防红外线夜视摄像头,控制器,万向轮、驱动轮胎、螺栓和弹簧等组成(如图2)。各部件的连接方式,内部各个结构,螺栓连接;多组刺足根部,粘接固定在半圆面体和透明环形体外侧;刺足为薄壁套筒结构,内部弹簧两端固定连接,实现刺足的伸缩调整,足顶与橡胶材质吸盘粘接。深沟球轴承型号6815-2RS61815RS,滚动驱动电机为12V直流正反转电机,行走机构驱动轮组型号为TAB-QT330B。高清微型安防红外线夜视摄像头7.1,自带电池,与手机端下载的APP关联,自带热点,不需要网络,可录像可录音可夜视。用STC89C52RC芯片连接蓝牙通讯模块,两个红外模块连接到芯片上。一个L298HN电机驱动模块驱动两个平地行走电机。用一个L298HN驱动两个滚动越障电机。
3多足行走装置的使用方法
遥控器近程或远程控制,一套平地行走机构,可以实现平地行走和控制方向;在复杂地形,一套多组刺足翻滚运动装置,若干支撑点接触越过障碍,实现滚动行走,实现户外恶劣环境摄像取景。
多足行走器1.1和1.2,环氧树脂材料,呈两个半圆面形态,上面规律地排布着多组可伸缩刺足,可伸缩刺足,其结构包括:支撑腿2.1\2.2\2.3---2.55,伸缩腿3.1\3.2\3.3\---3.55,弹簧4.1\4.2\4.3\----4.55,橡胶垫5.1\5.2\5.3\---5.55,;通过两个深沟球轴承6.3和6.4,与透明材质的环体6.1连接为一个整体,整体呈仿生海胆形态;透明材质的环体6.1,外面有规律排布的刺足,内部固定承载一套翻滚驱动电机7和7.8、控制器7.2和高清微型安防红外线夜视摄像头7.1等内部结构;一套平地行走机构,结构设计重力偏心,重力大端下垂,实现平地行走部分包括:红外感应7.3,万向轮9,驱动电机9.7和9.8,轮胎9.1和9.2。一套翻滚驱动与多足行走器1.1和1.2连接,实现滚动行走。点接触滚动行走越过障碍,实现户外恶劣环境摄像取景或灾难发生后,恶劣环境红外线探测生命的目的。
4多足行走装置的有益效果
一种户外红外线摄像和探测观察多足行走装置,灵感来自海胆的仿生设计,野生户外摄像与取景,灾难发生后的生命观察与寻找,多足行走机构通过伸缩部分关节,驱动力的作用,翻滚跨越高低不平的障碍物,整体形态较小,可以穿越狭小空间,深入到救援人员难以进入的黑暗废墟下进行生命探测,通过手机APP观察有无伤亡人员存在,可以摄像和取景,实现探测救援的目的,达到人无法达到的工作效力。
备注:课题来源于2020年辽宁科技大学《产品结构设计》一流本科课程建设项目阶段成果。
