基于功率预测的光储发电系统控制策略优化
2021-09-03王胜辉王政宇李潇潇王志喜
王胜辉,王政宇,2,陈 姝,李潇潇,王志喜
(1.沈阳工程学院,辽宁沈阳 110136;2.国网吉林省电力有限公司四平供电公司,吉林 四平 136000;3.辽宁能源投资(集团)有限责任公司,辽宁沈阳 110000;4.辽宁太阳能研究应用有限公司运维部,辽宁沈阳 110136)
目前,弃光现象的原因主要有两点:第一点是快速增长的装机容量与输送通道等设施的建设之间的矛盾;第二点是光伏的间歇性和不稳定性会对电网造成较大的影响,导致电网不得不选择性接受光伏的电能。因此,光储联合运行方式逐渐成为解决这一系列问题的有效手段。在光储式发电系统中,储能部分可以储存过剩的光伏发电的电能、平抑太阳能发电输出功率的波动[1]、改善电能质量。光储发电系统的控制策略可以动态调整能量在光伏、储能系统和电网之间的流动方向,更加有效地减轻光伏输出功率的波动,提高电网大规模接纳光伏发电的能力,减少弃光现象。光储发电系统的控制策略有:考虑区域自治的储能电站功率协调控制策略[2]、以经济性为目标的光储电站优化控制策略[3]、以净收益最大为控制目标,考虑计划跟踪模式的光储电站优化控制策略[4]、多种工作模式协同运行与切换控制策略[5]等。
在平抑光伏波动控制策略的研究中,多数采用的是低通滤波方法。由于该方法具有滞后性,其求解的平抑目标与实际功率曲线相比存在延迟现象,不利于多个功能的综合运行。而光伏功率预测作为一种超前预知的光伏输出功率测量方法,可以解决这一问题。光伏功率预测方法众多,例如:基于KPCA 与混合蛙跳算法的光伏电站发电量预测算法[6]、基于数据挖掘的光伏发电量预测算法[7]、基于思维进化算法和BP 神经网络算法的预测方法[8]等。
本文提出一种基于功率预测的光储发电系统的优化控制策略。首先,改进光伏功率预测算法,将基于跟随行为的人工鱼群算法与BP 神经网络结合,提高预测算法的速度和精确度。其次,将光伏功率预测数据作为影响因素,纳入控制策略的考虑范围内。在保证输出的前提下,抑制光伏出力的波动。
1 光伏功率预测算法优化
1.1 人工鱼群基本行为
(1)觅食行为
以求最大值为例,假设第i条人工鱼的某一时刻状态为Xi,在其搜索范围内随机选择一个状态Xj,满足公式(1):

式中:Rand()为0 到1 之间的随机数。
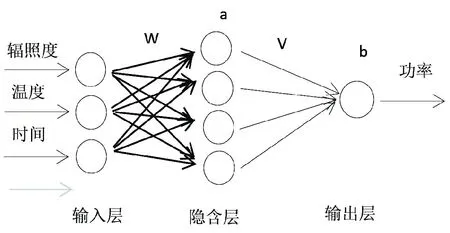
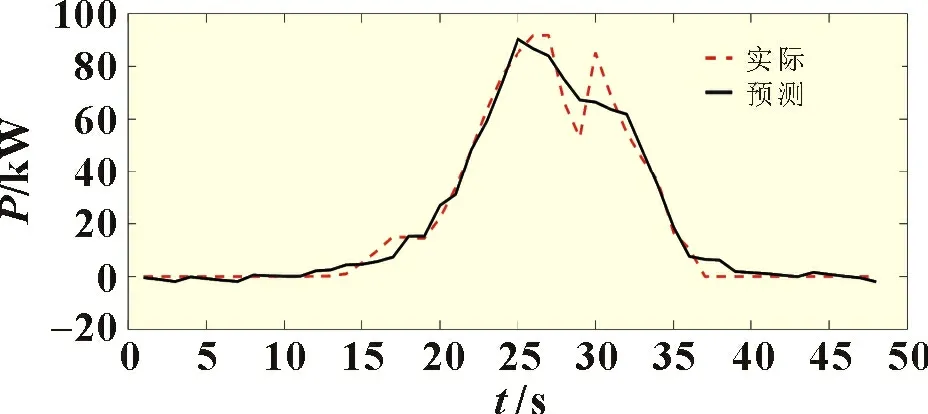
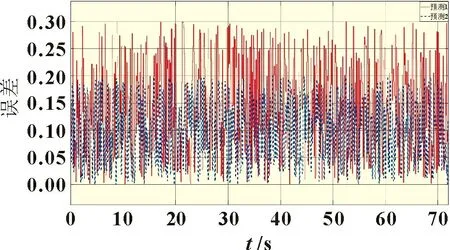
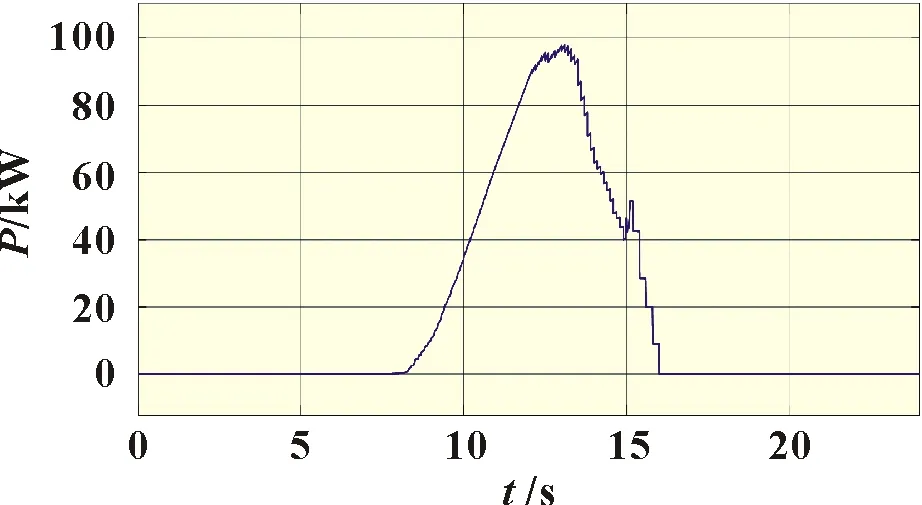
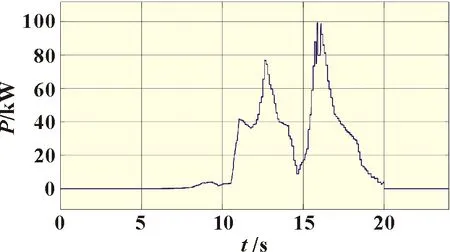
如果Yi 如果不满足前进条件,则重新在搜索范围内选择一个状态,判断是否满足移动的条件。反复选择Try number(设定的重复次数)次之后,如果仍然没有移动,则随机移动一步。 (2)聚集行为 假设第i条人工鱼的某一时刻状态为Xi,在当前状态搜索到同伴的数量为n,中心位置Xc,根据公式(3)判断: 式中:δ为拥挤度因子;Yc和Yi分别为中心位置和当前位置的食物浓度。如果成立,表示中心食物浓度较高且不拥挤,则向中心方向移动一步;如果不成立,则执行觅食行为。 (3)追尾行为 假设第i条人工鱼的某一时刻状态为Xi,在当前状态搜索附近同伴,找到同伴中食物浓度最大的Yj,其位置为Xj,根据公式(4)判断: 如果成立,表明同伴Xj处具有浓度较高的食物并且不太拥挤,则向同伴Xj方向移动一步;如果不成立,则执行觅食行为。 (4)随机行为 该行为是觅食行为的一个缺省行为,即在视野范围内随机选择一个位置向其移动,下一个状态的位置为: 在基本人工鱼群算法的追尾行为中根据公式(4)判断目标位置是否拥挤而向该方向移动。公式中的拥挤度因子是固定值,但在解决实际问题当中,很难给出适合的拥挤度因子的值。不适当的拥挤度因子对算法的速度和精度有很大的影响。为解决此问题,将人工蜂群算法[9]中的觅食行为定义为跟随行为,并在基本人工鱼群算法中采用这种跟随行为,以此减少参数设置。 具体方法如下:设第i条人工鱼的某一时刻状态为Xi,在视野范围内搜索到最优伙伴的状态为Xj。跟随鱼通过观察引领鱼判断解的适应度值来选择最优解,并依据选择概率的大小选择跟随的引领鱼。适应度值fiti和选择概率Pi的计算公式如下: 式中:fi为第i个解的目标函数值;Np为人工鱼群的总体数量。 本文采用此方法预测光伏功率,因此,以光伏发电系统为例。想要运用此方法解决问题,首先要确定神经网络模型。影响光伏输出功率的因素有很多,包括:辐照度、温度、云量、太阳入射角和时间等。一些因素很难精确预测出,且对光伏的输出功率影响较小,所以本文只选择一些主要影响因素作为BP 神经网络的输入。输入层神经元为3 个,输出层的神经元为1 个。对于隐含层和隐含层中神经元个数的选择目前还没有明确的规定。本文采用Kolmogorov 定理确定隐含层神经元个数: 式中:s为隐含层神经元数;n为输入层神经元数。因此,这里隐含层选择一层,隐含层中神经元的个数根据经验公式计算出为7 个,网络结构示意图如图1 所示。 图1 网络结构示意图 图1 中:W为输入层和隐含层之间的权值;V为隐含层和输出层之间的权值;a和b分别为隐含层和输出层的阈值。BP 神经网络样本训练的本质就是调节以上几个参数,使输出达到期望的值。因此,将这些参数设置为人工鱼的状态,则人工鱼可以表示为: 式中:w11、w12、w13为输入层到隐含层第一个神经元的权值;a1为隐含层第一个神经元的阈值;w1n,…wmn为输入层神经元到隐含层第n个神经元的权值;an为隐含层第n个神经元的阈值;v11、v21、v31、v41为隐含层神经元到输出层第一个神经元的权值;b1为输出层第一个神经元的阈值;v1k,…vnk为隐含层各个神经元到输出层第k个神经元的权值;bk为输出层第k个神经元的阈值。 人工鱼群算法默认情况下寻求最大值,因此,水域中食物的浓度设置为BP 神经网络总误差的倒数。这样,人工鱼群算法求出的最大值对应的就是误差的最小值。任意人工鱼xz和xc之间的欧式距离可以表示为: 该控制策略中含有三个约束条件:光伏出力状态、蓄电池储能程度、光伏功率预测。光伏出力状态可分为不出力和出力,出力状态一般在早上7 点到下午6 点之间,不出力状态一般在夜晚。蓄电池储能程度可划分为欠储能状态、满储能状态、极限状态。其中过欠储能状态是指电量低于设定放电深度;欠储能是指电量在充满状态和放电深度设定值之间。光伏功率预测作用是预测下一时段的发电量,根据预测的输出功率和当前输出功率的差可分为光伏在下一时刻输出波动大和输出波动小,其中,光伏输出波动大的情况还分为正向波动大和负向波动大,它们分别表示下一时段光伏出力比当前时段差值的大小。该控制策略是将预测的发电量曲线与当前的发电量相比较来判断功率流动方向,控制电能的输出或储存。 光储电站控制输出电量的核心是对储能系统充放电进行控制。以平抑光伏输出波动为目标,同时考虑储能系统的剩余能量、额定功率等因素的影响。控制策略是对下一时刻光伏的输出功率进行预测,通过计划发电功率和预测发电功率之间的偏差,制定相应的储能系统的期望输出值。 储能系统的实时输出功率会受到储能系统的剩余电量、额定功率等因素的限制。储能系统输出功率的约束条件如下: 式中:Pb(max)为储能系统的最大输出功率;SOE(t)为储能系统t时刻的能量状态。为了避免储能系统过充过放,需设置限制值,a为储能系统允许下限制,b为储能系统允许上限制,本文取a=0.4,b=0.9。公式(11)为储能输出的功率限制;公式(12)为t时刻储能系统能量状态的约束,其中SOE(t)的计算公式如下: 式中:Qo为储能系统初始能量;Q为储能系统额定容量:dt=1 min。 本文储能系统按恒功率进行充放电,当储能系统按最大额定功率充电1 min 时,储能系统能量状态的变化量如下: 利用该公式确定储能系统充放电的临界状态。 考虑功率预测参数后,增加判断条件: 式中:P(t)为实际光伏的光伏输出功率;Pf(t+1)为电站预测t+1时刻光伏输出功率;P为光伏装机容量。公式(15)表示t时刻与t+1 时刻光伏输出功率之间波动较小,储能系统按照表1 中的操作正常工作。 表1 储能系统出力控制 t时刻与t+1 时刻光伏输出功率之间波动较大,并且t时刻到t+1 时刻光伏输出功率呈减小趋势。若此时储能系统处在工作状态三或四时,储能系统工作状态改变为优先充电,限制放电。 t时刻与t+1 时刻光伏输出功率之间波动较大,并且t时刻到t+1 时刻光伏输出功率呈增长趋势。若此时储能系统处在工作状态二或三时,储能系统工作状态改变为优先放电,限制充电。 对改进后的光伏功率预测方法进行建模仿真。仿真所用数据是利用Pvsyst 软件计算得出。具体地点选择沈阳市,并从NASA 网站查询相关的天气数据、环境温度等影响光伏发电的因素。 (1)验证预测精度。设定BP 神经网络中的相关参数:最大训练次数为500 次,学习率为0.1。设定人工鱼群算法中的相关参数:最大迭代次数100 次,人工鱼数量为20 条。 无优化的BP 神经网络仿真结果如图2 所示,图中虚线为实际的功率输出,实线曲线为预测的功率输出。整体来看,没有优化的BP 神经网络的预测效果大致符合实际功率输出趋势,但在功率波动较频繁的时刻,预测的输出值存在很大的偏差。 图2 无优化功率预测算法预测值与实际值曲线对比 优化后的BP 神经网络仿真结果如图3 所示。将优化后的实际和预测功率输出对比图与优化前的相比较,可以看出优化后的BP 神经网络预测的功率输出曲线更加接近实际的功率输出曲线,在功率变化较大的20~25 s 和30~35 s 时,无优化BP 神经网络预测精度平均误差为17.62%和23.17%,优化后的BP 神经网络在上述时间段的平均误差分别为10.47%和13.41%,表明优化后的BP 神经网络比无优化的预测结果更准确、更加贴近实际值。 图3 优化后功率预测算法预测值与实际值曲线对比 (2)验证预测速度。设定BP 神经网络中的相关参数:目标精度为0.01,学习率为0.1。设定人工鱼群算法中的相关参数:目标精度为0.01,人工鱼数量为20 条。 无优化的BP 神经网络误差如图4 所示。该算法精度趋近0.01 时,迭代了约100 次。前期的误差逼近速度很快,但随着误差值接近目标值,速度也逐步减慢。 图4 无优化的BP神经网络误差 优化后的BP 神经网络误差如图5 所示。改进后算法精度趋近0.01 时,迭代了约50 次。虽然前期误差逼近速度较改进前慢,但随着误差值接近目标值,速度也逐步加快。由此可以得出:在设定相同精度的情况下,无优化的BP 神经网络功率预测算法需要迭代100 次达到设定的精度值,优化后的BP 神经网络功率预测算法迭代50 次可达到设定的精度值,算法速度得到提升。 图5 优化后的BP神经网络误差 为进一步验证本文给出的光伏功率预测算法的有效性,将同样属于非线性预测算法中典型的支持向量机预测算法建模仿真,分析比较两种光伏功率预测算法的仿真结果。 图6 为两种光伏功率预测算法的预测曲线图,图中黑色实线为实际光伏输出功率曲线,红色点画线为支持向量机预测算法预测的光伏输出功率曲线,蓝色虚线为基于跟随行为人工鱼群优化BP 神经网络的光伏功率预测算法预测的光伏输出功率曲线。从图中可以看出,基于跟随行为人工鱼群优化BP 神经网络的光伏功率预测算法预测的光伏输出功率曲线更加贴近实际的光伏输出功率曲线,尤其是在输出功率波动较大的情况下。为了更明显地比较出两种光伏功率预测算法的预测精度,建模仿真得到误差曲线,如图7 所示。 图6 光伏输出功率预测曲线 图7 预测误差曲线 图7 中红色实线为支持向量机预测算法的误差曲线,蓝色虚线为基于跟随行为人工鱼群优化BP 神经网络的光伏功率预测算法的误差曲线。从图中可以看出支持向量机预测算法与基于跟随行为人工鱼群优化BP 神经网络的光伏功率预测算法相比预测误差较大,并计算得到平均误差分别为0.212 和0.147。因此,通过以上仿真分析证明了本文给出的基于跟随行为人工鱼群优化BP 神经网络的光伏功率预测算法的有效性。 对基于光伏功率预测的控制策略建模仿真。为证明本文给出的控制策略能够更好地平抑输出功率的波动,对PID控制策略、基于BP 神经网络功率预测控制策略和基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略的光储发电系统建模仿真,分析比较仿真结果。 (1)光伏侧输出较平稳。选择较平稳的光伏输出功率曲线。如图8 所示,光伏输出功率波动较小,光伏功率变化比较平滑,是理想的光伏功率输出情况。在该情况下,利用Matlab软件仿真出PID 控制策略、基于BP 神经网络功率预测控制策略、基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略下的光储发电系统输出功率曲线,比较并分析。 图8 光伏侧输出功率曲线(平稳) 图9 为PID 控制策略、基于BP 神经网络功率预测控制策略、基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略下的光储发电系统输出功率曲线。图中蓝色实线为基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略下的光储发电系统输出功率曲线,该控制策略对功率预测进行了改进,故图例中简称为“改进后”;红色虚线为PID 控制策略下的光储发电系统输出功率曲线,因该控制没有考虑功率预测,只是简单的线性控制,故图例中简称为“无控制”;黑色点画线为基于BP 神经网络功率预测控制策略下的光储发电系统输出功率曲线,该控制策略考虑了功率预测对控制策略的影响,但功率预测算法是早期传统的基于BP 神经网络的功率预测算法,故图例中简称为“改进前”。从图中可以看出,PID 控制策略、基于BP 神经网络功率预测控制策略和基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略都可以平抑光伏输出功率的波动,但基于BP 神经网络功率预测控制策略和基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略会根据预测的光伏输出功率,有选择地控制储能系统的充放电,从而在某种意义上实现能量的转移,能够更好地平抑光伏的输出功率。而对比基于BP 神经网络功率预测控制策略和基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略下的光储发电系统输出功率曲线,可以看出虽然两种控制策略都可以平抑光伏的输出功率波动,但由于基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略中的光伏预测方法的精度提高,使控制结果更加符合实际的光伏输出功率情况,从而提高了控制策略平抑光伏输出功率的效果,并且这种平抑效果的差距会随着光伏功率波动的增大而增大。 图9 不同控制策略下光储发电系统的输出功率曲线(平稳) (2)光伏侧输出不稳定。选择多峰的光伏输出功率曲线。从图10 中可以看出,这条光伏输出功率曲线波动幅值较大、频率较多,是一种不理想的光伏功率输出情况。在该情况下,利用Matlab 软件仿真出PID 控制策略、基于BP 神经网络功率预测控制策略、基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略下的光储发电系统输出功率曲线,比较并分析。 图10 光伏侧输出功率曲线(不稳定) 图11 为PID 控制策略、基于BP 神经网络功率预测控制策略、基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略下的光储发电系统输出功率曲线。图中蓝色实线为基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略下的光储发电系统输出功率曲线,红色虚线为PID 控制策略下的光储发电系统输出功率曲线,黑色点画线为基于BP神经网络功率预测控制策略下的光储发电系统输出功率曲线。从图中可以看出,PID 控制策略的系统不再有良好的抑制光伏输出功率波动的效果。虽然对光伏输出功率起到了一定的缓冲作用,但整体仍然波动较大,在8~10 s、12~14 s、14~15 s 时,系统输出波动分别为24.4%、16.4%和10.5%,在15~17 s 时,由于光伏输出波动较大,系统的输出波动甚至达到了31.2%。而基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略在光伏输出功率多峰、波动幅值较大的情况下,仍然可以有效地抑制光伏输出功率的波动。在下一时刻功率波动之前,控制储能系统充放电能,从而吸收因光伏输出不稳定而产生的波动,有较好的平抑效果,在波动较大的8~10 s、12~14 s、14~15 s、15~17 s,系统的功率输出分别为3.9%、2.4%、4.6%、6.2%。对比基于BP 神经网络功率预测控制策略和基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略下的光储发电系统输出功率曲线,可以看出基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略比基于BP 神经网络功率预测控制策略平抑光伏波动的效果更好,这是因为在光伏输出功率波动较大的情况下,BP 神经网络功率预测法预测精度相对基于跟随行为人工鱼群优化BP神经网络的功率预测算法较低,不准确的功率预测会导致对下一时间段的光伏输出总电量、光伏功率等参数产生预测误差,使控制系统误判断,从而降低平抑效果。 图11 不同控制策略下光储发电系统输出功率曲线(不稳定) 以上是通过Simulink 仿真得到的结果,但在实际光储电站运行中会产生一些误差。储能系统方面,仿真模型中的储能系统为理想储能元件,而实际中储能元件在工作时会产生大量的热量改变工作环境的温度,从而影响储能元件。而且随着工作时长的增加,储能系统会出现一定的损耗,降低其性能。线路开关方面,本文仿真中采用的是ideal switch 理想开关元件,而在现实系统中,开关元件的开合都会产生波动。损耗方面,仿真中的线路都默认为无损耗,但在实际中都会产生线路损耗、接口损耗等。另外还有很多环境因素的影响,这些影响因素都会使仿真与实际产生一些误差,对光储发电系统输出功率的波动产生影响。 本文提出了一种基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略,通过Matlab 仿真计算后,得到如下结论: (1)储能系统对平抑光伏输出波动有一定的作用,但属于被动式调节,易受储能系统容量影响。PID 控制下的系统在环境变化大的8~10 s、12~14 s、14~15 s、15~17 s 时,系统输出波动分别达到了24.4%、16.4%、10.5%、31.2%,输出功率波动较大,平抑效果不理想。而基于跟随行为人工鱼群优化BP神经网络的功率预测控制策略下的光储发电系统,在上述波动较大的时刻,输出功率系统输出波动分别为3.9%、2.4%、4.6%、6.2%,系统输出功率波动较小。 (2)基于跟随行为人工鱼群优化BP 神经网络的功率预测控制策略下的光储发电系统输出功率无论是在光伏输出平稳还是在光伏输出波动较多的情况下,都有良好的平抑效果。虽没有较高的功率输出值,但输出基本保持稳定,对电网的影响较小,提高了电能质量。



1.2 基于跟随行为的人工鱼群算法

1.3 基于跟随行为的人工鱼群优化BP 神经网络的光伏功率预测算法设计



2 基于功率预测的光储发电系统控制策略优化
2.1 控制策略优化设计
2.2 控制策略运行机制





3 仿真计算
3.1 基于跟随行为人工鱼群优化BP 神经网络的光伏功率预测算法仿真计算




3.2 基于功率预测的光储电站控制策略的仿真计算


4 结论
