考虑几何非线性的变弯度机翼鱼骨结构分析研究
2021-09-03陈小雨张凯航大连理工大学辽宁大连116024
李 扬,陈小雨,张凯航,杨 睿(大连理工大学,辽宁 大连 116024)
0 引言
变弯度机翼的变形结构是实现变体飞机的重要关键技术之一,变弯度机翼是通过变形结构驱动机翼外形完成弦向弯度的变化,与传统飞行器固定机翼相比,机翼弯度的变化可以为飞机提供更好的机动性,较低的能耗以及适应工况的气动性能。
近年各类型的变弯度机翼设计方案也被大量的提出,Barbarino等人对已存的设计工作方案进行全面的概述[1],大部分变弯度机翼设计都偏向于在柔性结构的应用,Heo等人提出基于零泊松比蜂窝填充结构的设计[2],Michael等人提出的基于柔性波纹结构的设计[3]。根据仿生学研究启发,Woods等人提出一种基于鱼骨形柔性翼肋的连续变弯度机翼结构设计[4]。其中变形柔性结构为鱼骨柔性翼肋部分,该结构具备较强的各向异性特性,弦向变形弯曲刚度低,展向以及厚度方向面外承载刚度较高。该设计既实现了变形结构的低驱动力,也保证了高承载强度。
随后Woods对鱼骨柔性机翼进行了大量研究,对变弯度鱼骨机翼外形的气动性能[5]、变形能力[6]、风洞试验中气动效率升阻比[7]进行了研究探索。Woods在结构设计分析时,理论基础为线性欧拉梁理论和有限元理论,仿真分析后再通过引入主梁的长度不变的非线性条件修正模型,这种分析依旧存在没有考虑在结构大变形时受力情况发生变化的问题,导致不能完全准确反映结构形变;此外,在变弯度机翼柔性结构设计方面,李刚等人基于考虑结构承载性与变形连续性提出多复铰连杆机翼设计[8],王志强等人基于结构轻量化与新型智能材料提出应用形状记忆合金的机翼设计[9]。通常在柔性结构大变形时,结构刚度会发生变化,会影响结构设计的初始条件,导致初始的结构设计无法完全兼顾承载性和变形能力。
所以综合从反映鱼骨结构的真实变形与几何非线性对结构的影响的角度来看,应采用考虑结构变形中受力方向发生变化的非线性大变形结构的分析方法研究其结构特性,并且考虑几何非线性大变形对结构的影响,对鱼骨结构的几何尺寸进行设计,提出兼顾承载与变形能力的设计条件。
1 变弯度机翼结构介绍及推导
1.1 变弯度机翼结构设计及模型简化
本文为了探究鱼骨柔性结构的几何非线性特性,基于鱼骨柔性结构,提出一种变弯度机翼后缘结构设计方案,如图1所示。1为刚性前缘段,2为驱动器安装盒段,3为主动变形柔性,4为刚性后缘。该变弯度机翼设计变形原理为依靠驱动器向后缘段输出偏心位移载荷,产生转矩,驱动整体柔性结构段发生弯曲变形。该结构设计方案使用了输出力重比更高的驱动器气动肌肉,与同样电机结构驱动的变弯度鱼骨机翼段相比,机翼段整体结构轻量化效果更好。

图1 基于鱼骨结构的变弯度机翼设计
针对变弯度机翼后缘的鱼骨结构的大变形问题,首先分析机翼柔性变形段,提取其主要变形柔性鱼骨结构,如图2所示。对该鱼骨结构形状进行受力分析,受力模型如图3所示。为了方便理论模型的计算,对其受力进行简化。其鱼骨结构主要弯曲变形集中于主梁之上(图中粗实线部分),将模型垂直板部分去除,仅保留主要变形部分简化模型为悬臂梁模型,并且将载荷加载点变换至主梁上,简化受力模型如图4所示。
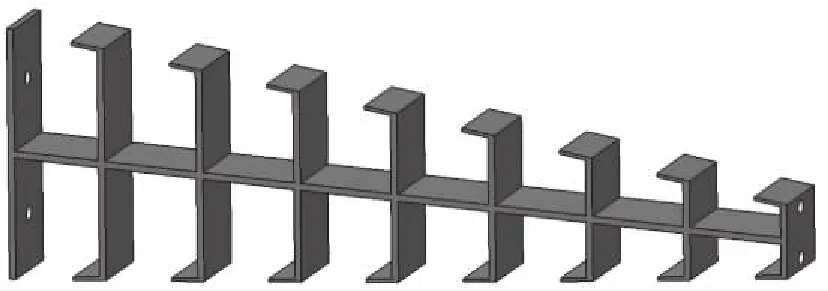
图2 鱼骨柔性肋
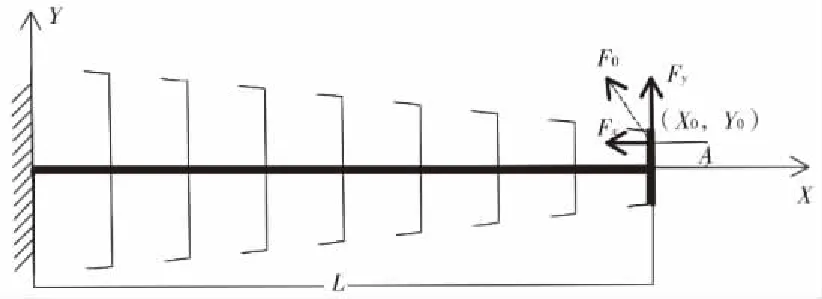
图3 鱼骨柔性肋结构简图
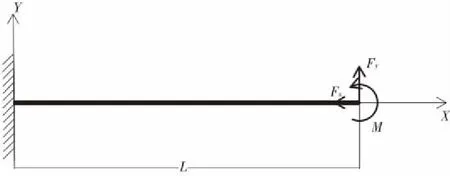
图4 鱼骨柔性肋模型简化图
1.2 非线性理论分析
针对鱼骨结构简化后的悬臂梁的大变形问题,本文基于分段线性化的思想,运用陈贵敏等人提出使用平面大变形梁的链式梁约束模型[10]计算理论对其结构进行分析计算。首先将大变形平面梁结构划分为若干单元梁,对每个单元梁利用梁约束模型进行建模分析,建立单元梁形变方程,然后按照变形几何关系推导单元梁之间的载荷平衡方程,最后联立宏观梁的几何变形方程得到整体梁的形变支配控制方程组,下面进行该模型的简单推导。
1)单元梁梁约束模型推导
首先将大变形梁划分为若干连续的单元梁,将每一段单元梁都独立使用梁约束模型进行建模,接下来对单元梁进行梁约束模型分析。
对于图5所示的单元梁Fo、Po和Mo表示梁所受的末端力和弯矩载荷,L表示梁的长度,ΔX、ΔY、θ表示梁的末端位移和转角。基于欧拉梁理论,根据文献[10]中梁约束模型推导得单段梁单元的形变表达式为:
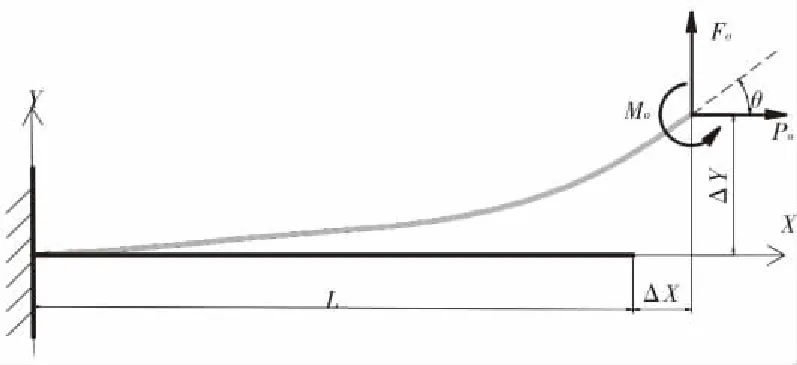
图5 单元梁变形示意图
(1)
(2)
式(1)式(2)中梁的几何和材料参数以及载荷进行了归一化处理,形变对梁长度进行归一化,变量表示为:
(3)
式(3)中,T表示梁的厚度,E为杨氏模量,I为该段梁关于Z轴的截面惯性矩。
2)宏观梁链式算法推导
根据Howell柔顺机构学的求解大变形问题的链式算法[11],进行宏观梁的变形推导,建立宏观梁模型,如图6所示。
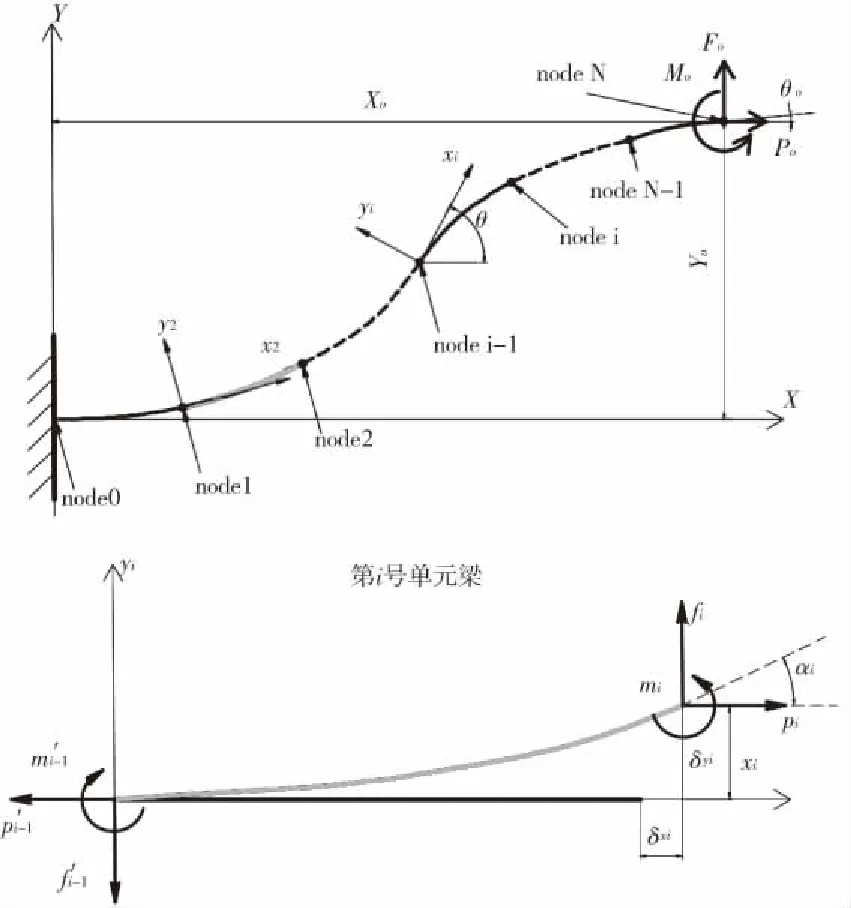
图6 大变形梁离散化计算模型
将梁等分成N个单元梁,对第i(2≤i≤N)个单元梁进行分析,从第i-1个单元的末端,沿节点i-1切线方向建立局部坐标系oixiyi。梁的自由端为节点N。fi、pi和mi则表示在第i段的局部坐标系下
节点i上的归一化的横力、轴力和弯矩,同时,用δxi、δyi和αi来表示水平位移、垂直位移和末端转角,对第i个单元梁分析,并且通过全局坐标系代换,可得其载荷平衡方程如下:
(4)
其中θi为第i个单元绕全局坐标系转动的角度。将宏观梁载荷归一化处理得:
(5)
宏观变形梁的变形后几何方程表示为:
(6)
Li为第i个单元的长度,等长划分后Li=L/N。大变形梁的每个单元梁有6个参数fi,pi,mi,δxi,δyi和αi描述载荷与形变。所以,对于N段等分的大变形梁,总共有6N个未知数。经过上述推导,链式算法宏观梁模型中包含3(N-1)个平衡方程和3个整体变形的几何方程,每个单元梁的梁约束模型的方程(3N个方程),总共有6N个方程。这6N个方程构成了链式梁约束模型方程组。
3)理论模型计算
根据上文大变形梁的链式算法约束方程组,求解该理论大变形模型计算过程如图7所示。可以将给定的大变形梁的末端载荷Po、Fo和Mo代入,解出其自由端的位移Xo、Yo和θo,以及每个单元梁的载荷与形变参数,描述整个梁的变形情况。
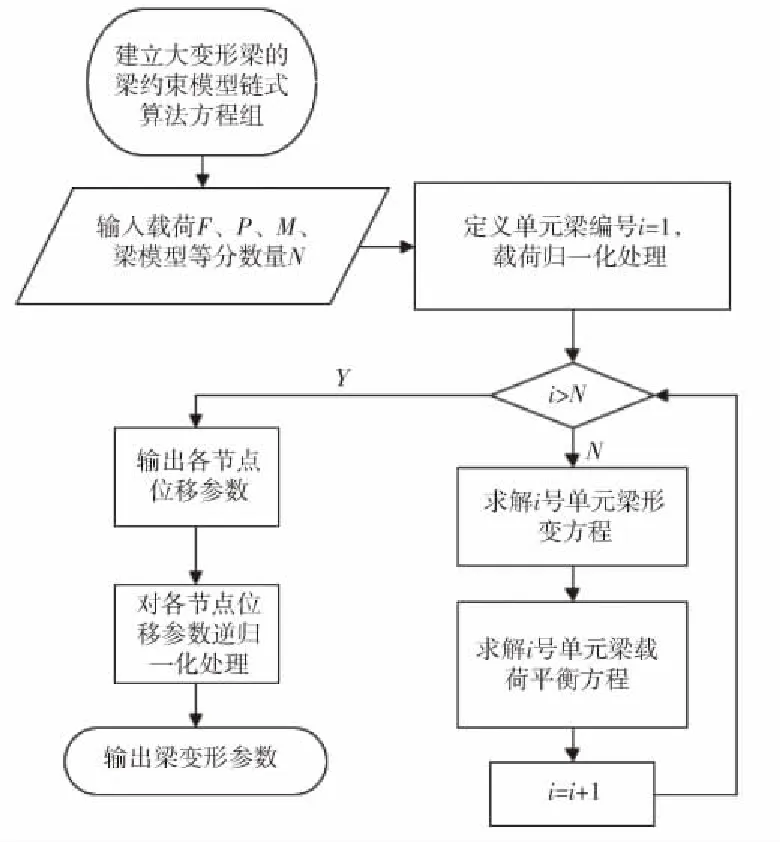
图7 大变形梁理论计算过程
2 模型算例仿真及试验验证
2.1 仿真建模与理论计算
根据本文变弯度机翼柔性鱼骨肋设计方案,采用有限元分析软件ABAQUS建立鱼骨柔性肋段有限元模型,如图8所示,两鱼骨肋前后与安装板固定,平行布置,两柔性肋间隔50 mm,具体模型数据如表1。整体模型全部使用壳单元S4R建模,边界条件为前安装板固支,载荷加载点布置于后安装板中部偏上10 mm位置。
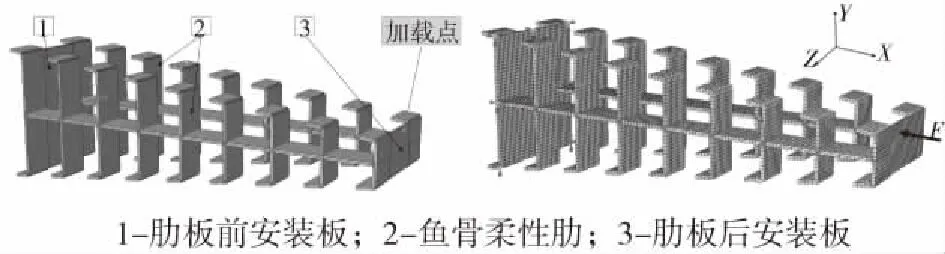
图8 鱼骨柔性肋结构及有限元模型
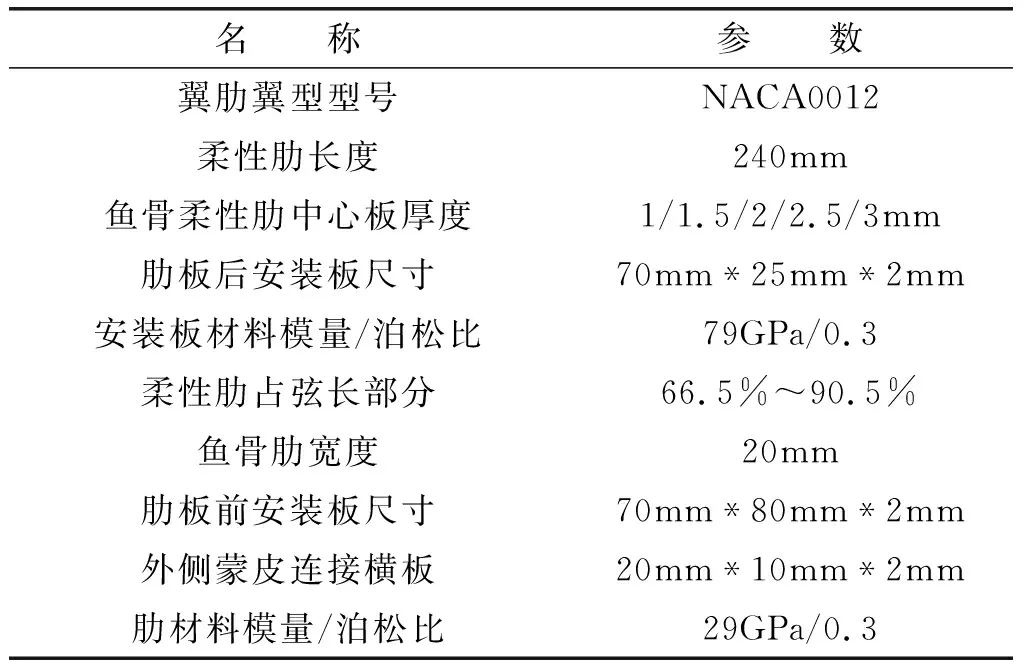
表1 仿真模型参数
建模完成后,于加载点上施加位移载荷F,分别进行基于线性以及非线性的仿真模拟。
建立该模型的几何非线性链式梁约束模型方程组,按照表1模型参数输入对应函数系数(根据梁的不同几何与材料参数输入对应E、I、L等),输入载荷驱动力Fo与Mo,按照8单元梁模型计算。利用商用软件MATLAB进行该方程组的求解,输出变形参数。
2.2 模型试验验证
基于仿真三维数模,制造2 mm厚度中心板试验模型,如图9所示。整体试验样段分为两部分,试验固定部分包括固定安装板,以及气动肌肉固定端,柔性翼肋部分包括肋板前后安装板、牵引钢索以及柔性鱼骨肋。气动肌肉左端与固定部分铰接,右端连接牵引钢索,再与肋板后安装板相连;柔性鱼骨肋与前后安装板均使用螺栓连接。试验时,使用调压阀调节气动肌肉内部气压使其产生变化的收缩力,通过牵引钢索拉动柔性鱼骨肋后安装板,使其发生弯度变化。

图9 鱼骨结构翼肋试验装置
气动肌肉气压加载过程从0 MPa气压以0.1 MPa为单位增长,一直加载至0.8 MPa,然后从0.8 MPa以0.1 MPa为单位卸载至0 MPa,经调压阀读取气动肌肉内部气压,测量该气压气动肌肉收缩的长度,通过气动肌肉位移与输出力的关系曲线读取收缩力,以毫米刻度网格坐标背景读取后缘变形点位移。
分别记录加载与卸载节点的气动肌肉长度以及后缘形变位移,取平均值,根据对应气压气动肌肉输出特性数据,读取对应收缩力,记为一组数据,重复9次,将9组数据平均后记为试验数据。
3 结果分析
为了研究分析鱼骨结构的几何非线性特性,图10中将链式梁约束模型与非线性、线性有限元仿真结果、试验结果的鱼骨柔性肋后缘中心Y向位移进行比较。结果表明,对于鱼骨柔性肋后缘中心Y向位移的四种计算结果变化趋势基本相同,且在Y向位移变形为10 mm前,此时载荷力约为15 N,四种结果变化趋势基本为线性,误差在5 mm(梁长度2%)内。载荷增加后,鱼骨结构的几何非线性特性逐渐表现明显,线性计算不适用大变形情况,此时链式梁约束模型与试验值、非线性有限元计算误差均在8 mm以内。图11中,分别表示出四种计算或试验值的小变形(15 N载荷)、大变形(30 N载荷)时的中心腹板的形变位置。小变形情况,四种变形结果误差均小于5 mm;大变形情况,线性计算方法误差较大,达到48 mm(梁长度20%),链式梁约束模型计算结果与试验误差保证在10 mm(梁长度3%)内,反映实际变形情况更加准确。
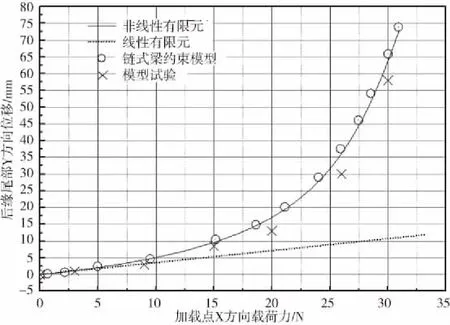
图10 鱼骨结构弯矩载荷驱动与变形关系图
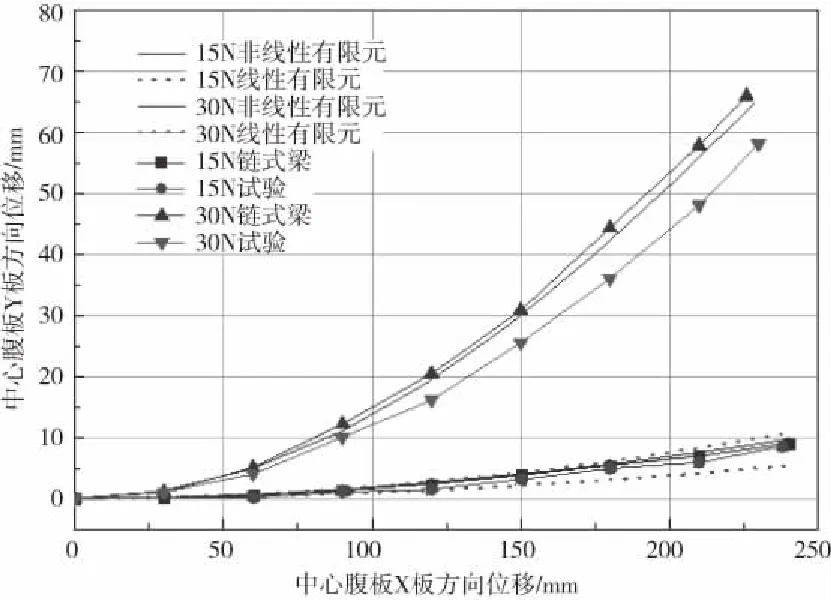
图11 鱼骨结构中心腹板形变位移
综合试验及有限元仿真分析数据验证,表明链式梁约束模型可以准确反映鱼骨结构的真实弯曲变形情况。所以接下来将使用梁约束模型分别对5种不同厚度中心板的鱼骨结构的变形情况进行计算,分析其结构的几何非线性特性对结构设计产生的影响。
如图12所示,非线性转折点前,结构载荷与位移可认为处于线性关系,在不同厚度、刚度的条件下,位移随载荷变化发生小幅变化。进入非线性部分后,随载荷变化,位移响应会出现较大幅度变化。随中心板厚度增加,鱼骨结构的线性区域增大,线性与非线性区域刚度变化逐渐平滑过渡,到达非线性特性转折点所需的载荷就更大,这是因为由于主要变形部分厚度增加,结构抗弯系数增大,随载荷的较大变化,也不会使位移出现大幅变化。
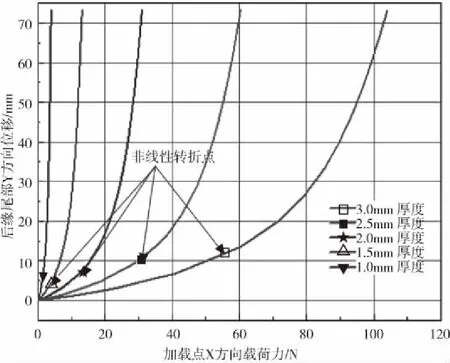
图12 不同厚度中心板鱼骨结构刚度特性
在结构设计使用中,需要考虑结构变形需求,具备一定的稳定性,所以就要求结构必须变形可控且稳定,因此需尽量使变形部分占小部分或非线性区域刚度较高。因为在结构刚度非线性部分,载荷出现轻微变化就会引起结构位移的较大变化,结构变形的稳定性不高,所以需要结构在线性特性区域可以承受更大的驱动载荷以及完成更大的变形。
针对以上分析考虑,对鱼骨结构进行设计,以鱼骨结构中心板厚度为例,厚度更大的鱼骨结构的线性变化区域更大,基于几何非线性特性的影响下,考虑采用更厚的结构设计为更优。进一步基于结构轻量化的考虑,需要结构在保证变形以及稳定性的情况下轻量化。表2列出各厚度中心板体积,以非线性转折点载荷力比体积作为对比量,衡量结构的比刚度,比刚度越大表明其在同样的体积下其表现的线性特性区域越大。在五种厚度下,3 mm厚度中心板比刚度更强,线性特性区域更大,但对驱动载荷力要求也更大,基于驱动器驱动范围(气动肌肉范围是0~50 N),再从考虑结构非线性影响的鱼骨结构设计的角度出发,兼顾轻量化以及驱动器的要求,表明以上五种厚度的鱼骨结构中,2.5 mm厚度为更优的设计,该条件下可以在保证大部分变形范围都属于线性特性变形区域,非线性特性范围内结构刚度较高,整体结构有效驱动载荷范围也符合驱动器要求。

表2 不同厚度的鱼骨结构体积及比刚度
本部分综合链式梁约束模型与有限元软件的计算反映变形的结果对比,链式梁约束模型在计算鱼骨结构的大变形问题时可保证较高精度,运用链式梁约束模型分析了鱼骨结构的几何非线性特性对结构设计的影响,分析发现结构越厚,线性刚度与非线性刚度差距逐渐顺滑,结构稳定性越高。提出一种考虑几何非线性特性以及兼顾轻量化与驱动器范围的鱼骨结构尺寸设计方法。为鱼骨结构尺寸设计提供了新的理论方法,具有一定工程意义。
4 结论
本文针对基于柔性鱼骨结构的变弯度机翼后缘大变形问题,建立了基于机翼后缘部分鱼骨结构的链式梁约束模型,进行了鱼骨结构模型的大变形算例计算。对比有限元计算与试验验证的结果,分析了结构大变形对结构设计的影响,得如下结论:
1)结构小变形时,链式梁约束模型与线性计算方法误差在2%以内,大变形时,链式梁约束模型精度更高的反映真实变形且误差在3%以内,线性计算误差达20%。
2)鱼骨结构大变形时几何非线性特性对结构的影响,发现其厚度越大,线性刚度与非线性刚度差距逐渐顺滑,结构稳定性越高。
3)提出一种考虑几何非线性特性以及兼顾轻量化与驱动器范围的鱼骨结构尺寸设计方法,具有一定工程指导意义。