基于无人机遥感影像的盐碱地信息的精准提取方法
2021-09-02徐存东李洪飞谷丰佑高德坤
徐存东,李洪飞,谷丰佑,张 鹏,高德坤
(1.华北水利水电大学水利学院,河南郑州450046;2.水资源高效利用与保障工程河南省系统创新中心,河南郑州450046;3.河南省水工结构安全工程技术研究中心,河南郑州450046)
0 引 言
无人机遥感属于低空遥感技术,其在影像数据采集过程中具备机动灵活、成本低、高分辨率以及受气象干扰影响小等传统卫星遥感所不能比拟的优势。目前对无人机遥感的研究主要集中在其飞行系统的研制、遥感影像处理方法、森林资源清查、农作物监测和地物分类等方面[1]。相关研究中,提出了强化无人机飞行系统的稳定性、获取遥感影像的精确性以及数据传输和高精度的图像后处理等关键技术[2];结合地理信息系统技术和无人机遥感影像后处理技术,构建了专业森林资源调查与管理系统[3];基于无人机遥感获取的可见光影像,提出了优选特征训练分类模型[4];将无人机遥感技术在热带农业中进行应用,对归一化植被指数与物理土壤质量和香蕉果实生产数据的空间格局进行比较[5];利用植被纹理及颜色对不同植被类型进行分类[6]。虽然在无人机遥感定量监测方面国内外研究取得了丰硕的成果,但目前基于低空无人机遥感影像的盐碱地识别和监测的研究较少。
我国西北干旱荒漠区通过大力建设提水调水工程,发展人工绿洲是改善当地居民生产生活条件和重新构建区域小生态的重要措施,但是,由于大量的外调水灌溉和独特的高蒸发低降雨气候条件,致使该区域耕地次生盐碱化问题也越来越突出[7,8]。因此,盐碱地信息的快速获取和精确解译是改善农业生态的前提和基础。而在以往的研究中,主要是采用传统的航空航天遥感影像对盐碱地信息进行提取,存在数据波段多且相关性大、大量冗余数据和较易受天气影响等问题,给盐碱地的精准解译和分类带来了一定的技术难度和复杂度。因此,研究基于无人机遥感技术的盐碱地信息精确提取方法则显得尤为重要,本文选取景泰川电力提灌灌区(以下称“景电灌区”)为研究区,选取两个典型感兴趣区域,分别采用监督分类中的五类分类器执行分类,通过对比分类结果寻求提取该区域内盐碱地信息的最优方法,以期为研究区内盐碱地解译提供技术支撑。
1 材料与方法
1.1 研究区概况
景电灌区地处我国西北干旱荒漠区,该区域位于东经103°20'~104°04',北纬37°26'~38°41'之间,北依腾格里沙漠,南靠祁连山脉东端,东临黄河,是连接甘、宁、蒙三省的交界地带[9]。灌区建成于20 世纪70年代处,分两期建成,一期建成于1971年,二期于1987年投入使用,其地理位置见图1。灌区属典型的温带大陆性气候,多年平均降雨量185.6 mm,多年平均蒸发量2 365.92 mm,干旱少雨,昼夜温差大,蒸发强烈,日照时间长,春季多风,夏季炎热且无霜期较长。干旱的气候条件、低平封闭的地形、土壤母质含盐量较高以及不合理的耕作、灌溉和施肥等原因,诱发了该区域大面积的土壤盐碱化。随着盐碱化程度的不断加剧,使得大量土地被弃耕,土壤盐渍化已成为制约灌区土地资源利用的主要障碍,严重制约当地农业生产的可持续发展。
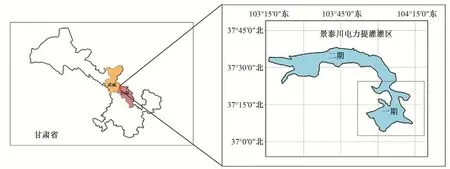
图1 灌区地理位置Fig.1 Geographical location of irrigation area
1.2 数据获取与整理
在景电灌区于2017年5月25日进行航空影像采集,采用弹射起飞方式,高度500 m;搭载2 400 万像素的SONY ILCE-5100相机,并配备影像传感器。起飞前先进行研究区飞行架次划分,飞机按“蛇”字航线在每个架次内连续垂直航拍,完整覆盖整个区域,采集精度15 cm。无人机每个架次内拍摄200~350张分辨率6 000×4 000的照片。
航空影像采用UASMaster 进行快速拼接,首先通过POS 进行数据定向及点云提取,然后通过地面控制点GCP 数据进行点云数据的地理信息配准,最终建立立体模型、赋予纹理,获取符合拼接结果的真彩色图像见图2(a),在目视分析原始影像和地面调查的结果的基础上,通过无人机采集土壤盐渍化较为严重区域的图像。感兴趣区域见图2(b)和图2(c),图像分辨率为0.15 m,图像储存为红绿蓝3种色彩的灰度信息[10]。
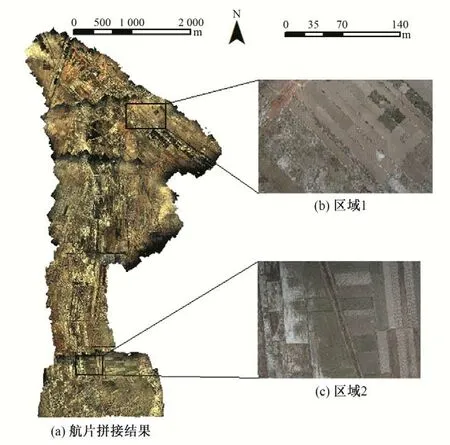
图2 感兴趣区域选择Fig.2 Region of interest selection
1.3 研究方法
在对原始影像数据进行预处理的基础上,采用低通滤波做增强处理。根据分类的复杂度、精度需求等选择分类器执行监督分类,本试验分别采用平行六面体、最小距离、最大似然、神经网络、支持向量机5种分类器对影像执行监督分类[11-13],分类器的说明如表1所示。
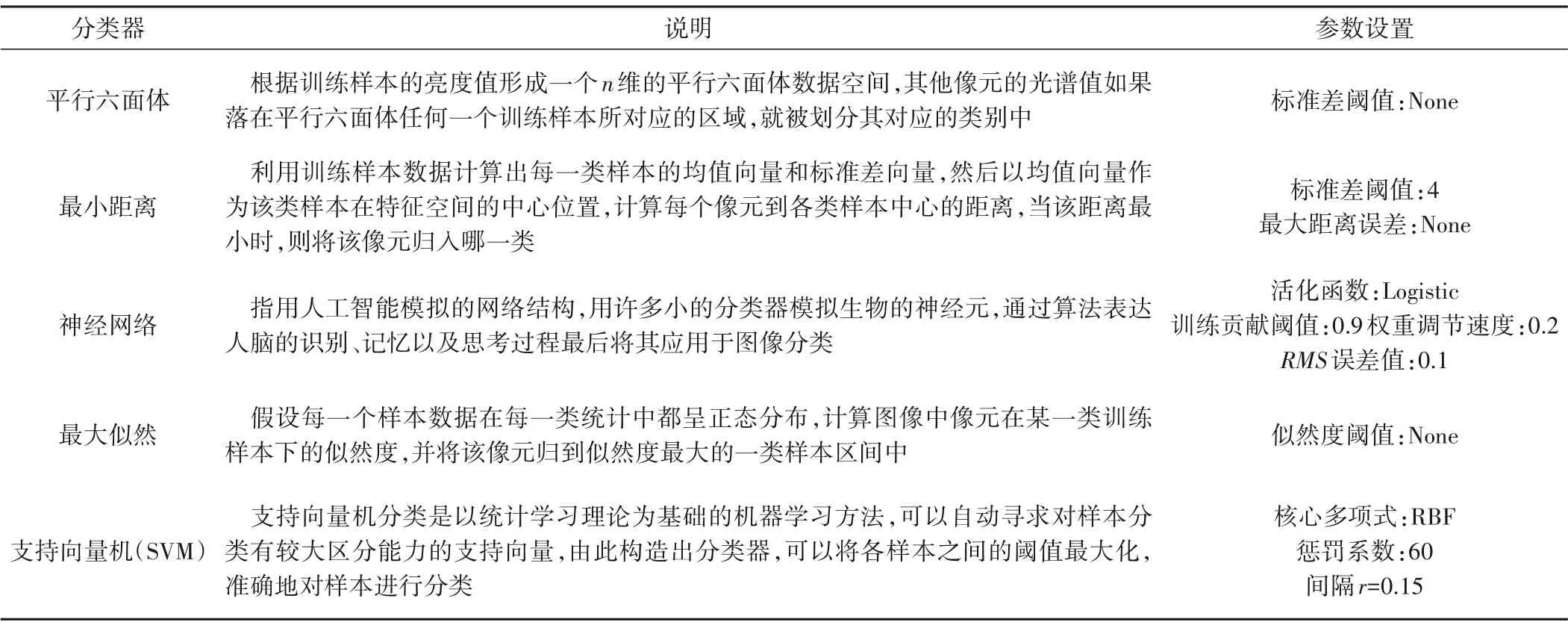
表1 5种监督分类器说明Tab.1 Description of five supervised classifiers
通过对无人机遥感影像基本判读,借助研究区地物自然属性以及野外调研结果,最终建立了研究区内耕地、荒地、树木和盐碱地等地物的遥感解译标志,如表2所示。区域1、区域2 各选取训练样本100 个和90 个,并在无人机航拍的区域1、区域2的范围内随机的选取1 m×1 m的样方各90个和80个,通过目视解译确定该样方地物类型,对最后分类结果进行验证。采用5种分类器执行监督分类,同时采用聚类(Clump)统计,对分类结果进行小斑点处理,以提高分类精度,并对分类结果进行验证。最后应用混淆矩阵对5种方法的分类精度进行评价。
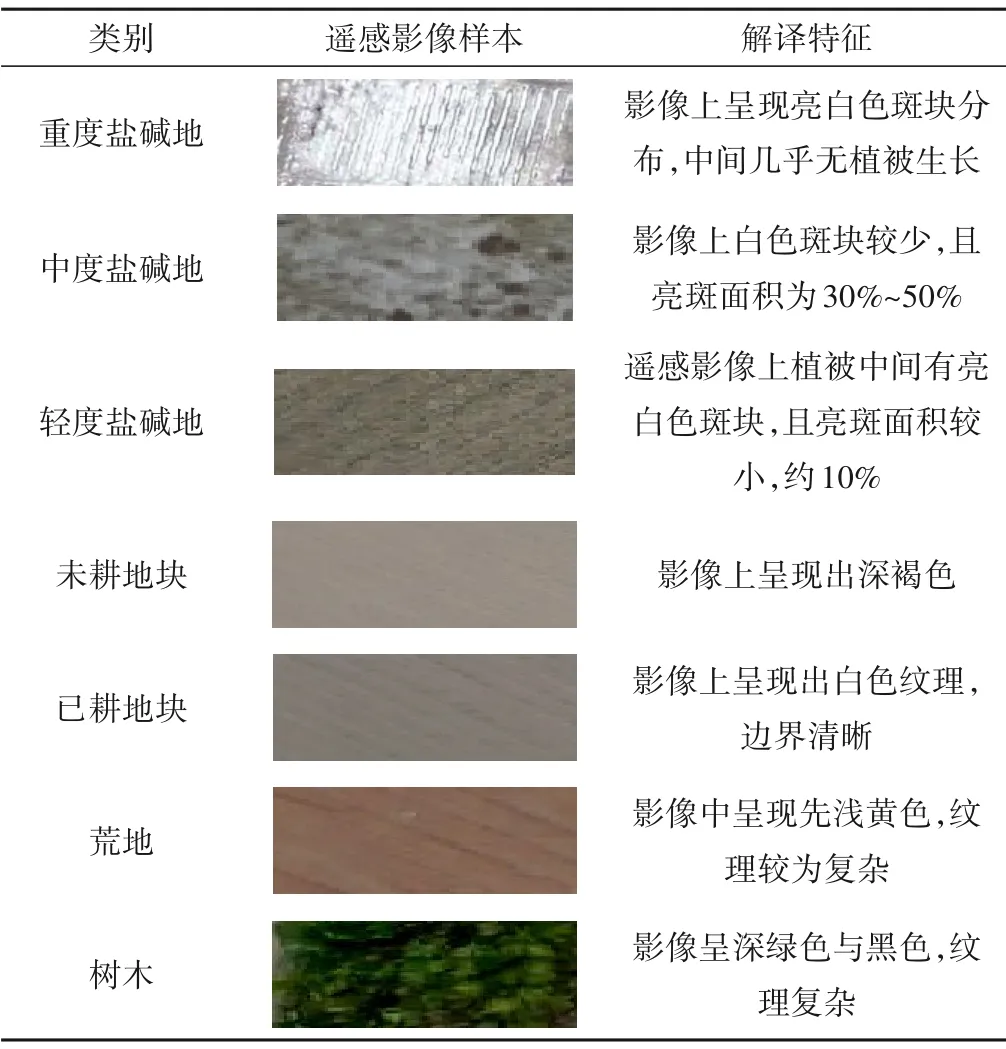
表2 遥感影像解译标志Tab.2 Interpretation mark of remote sensing image
2 结果与分析
2.1 分类结果检验
本研究应用遥感图像处理软件ENVI5.3对两个区域按上述5种监督分类器进行分类,其分类结果如图3、4所示。
区域1 分类结果如图3所示,区域2 分类结果如图4所示,从平行六面体到支持向量机各地物间分离度逐渐增高。在两个区域平行六面体的分类结果中,出现较多空白区域,即像元未参与分类;在最小距离分类结果中,区域1、区域2 中出现较多错分像元,轻度盐渍区中混入大量重度盐渍区的部分,已耕地块与未耕地块被错分为荒地;神经网络的分类结果较平行六面体与最小距离各地物的区分度较高,分类结果与实际地物有较好的吻合性,但依然存在少量错分的像元,尤其在地物交叉区域,未耕地块的部分像元被错分为荒地;最大似然与支持向量机分类结果中仅出现零星差异,最大似然分类结果中仅出现个别像元被错分,轻度盐渍区中部分被划分为未耕地块;支持向量机分类精度明显提高,各地物间分离度最高。
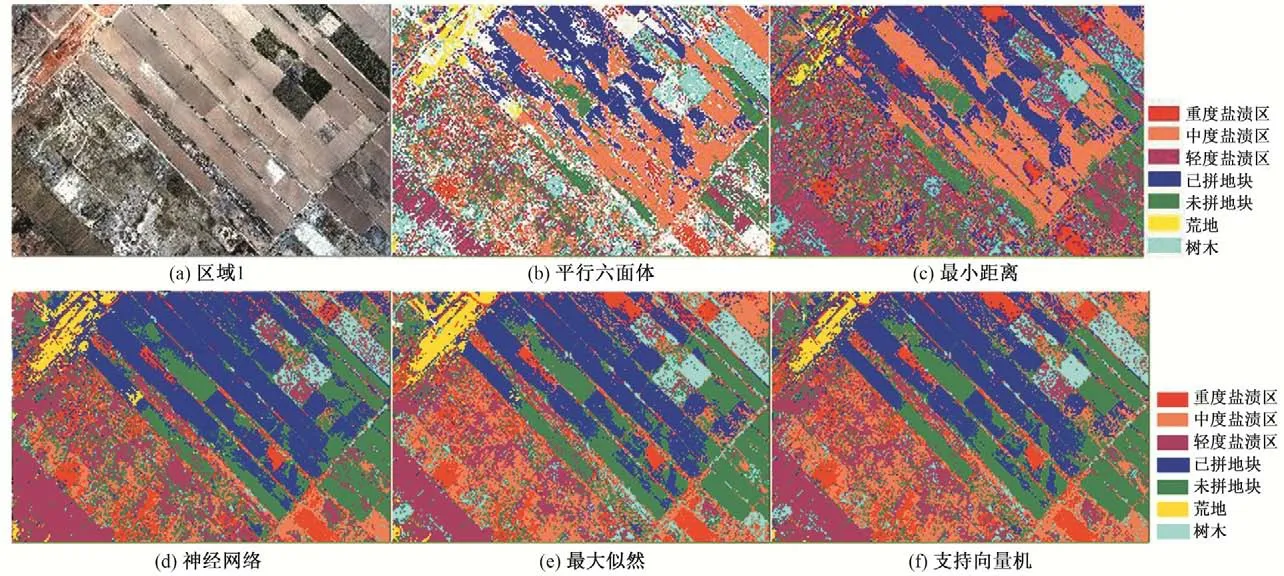
图3 区域1分类结果Fig.3 Area 1 classification results
图4 区域2分类结果Fig.4 Area 2 classification results
平行六面体分类是首先在各轴上假设大量的分割点,将多维特征划分为互不重叠且与不同类别一一对应的分类方法,这种方法为了构成特征子空间需要以较高的精度设定每个分类器的光谱特征上限值和下限值,对于某个未知像元如果落入所有的特征子空间中,则属于未知类型;最小距离分类法虽然计算快,但只考虑每一类样本的均值,计算每个像元到各类样本中心的距离,并没有考虑类别内部方差与类别间协方差,故分类精度不高;神经网络分类过度依赖于网格训练样本的选取,其在形式上只是大脑的简单粗略模仿;最大似然分类方法要求已知不同地物类型分布的先验规律而且假定其样本数据符合某一固定的概率模型,本试验的地物分布规律并没有事先确定,在没有达到模型假定条件情况下,容易出现较多错误分类像元;支持向量机最终分类函数只由支持向量所确定,支持向量的数目决定计算的复杂度,而非样本空间的维数,在某种程度上避免了维数所造成的分类误差,且具有良好的鲁棒性。
两区域中重度盐渍区、轻度盐渍区,未耕地块分布较为集中,中度盐渍区分布较为分散,且大部分分布在轻度盐渍区与已耕地块的边缘部分,荒地则主要分布在未耕地块间或两地物的交界地带,两区域均处于封闭型水文地质单元,受干旱气候、低洼封闭的地势条件以及人为灌溉因素的影响,积盐现象较明显。
2.2 精度评价
本实验分别对两区域的分类结果应用90、80个验证样本进行验证,采用混淆矩阵对分类结果进行评价,选取混淆矩阵中的总精度、Kappa系数、生产者精度和使用者精度作为参考的评价指标,评价结果如表3、4所示。
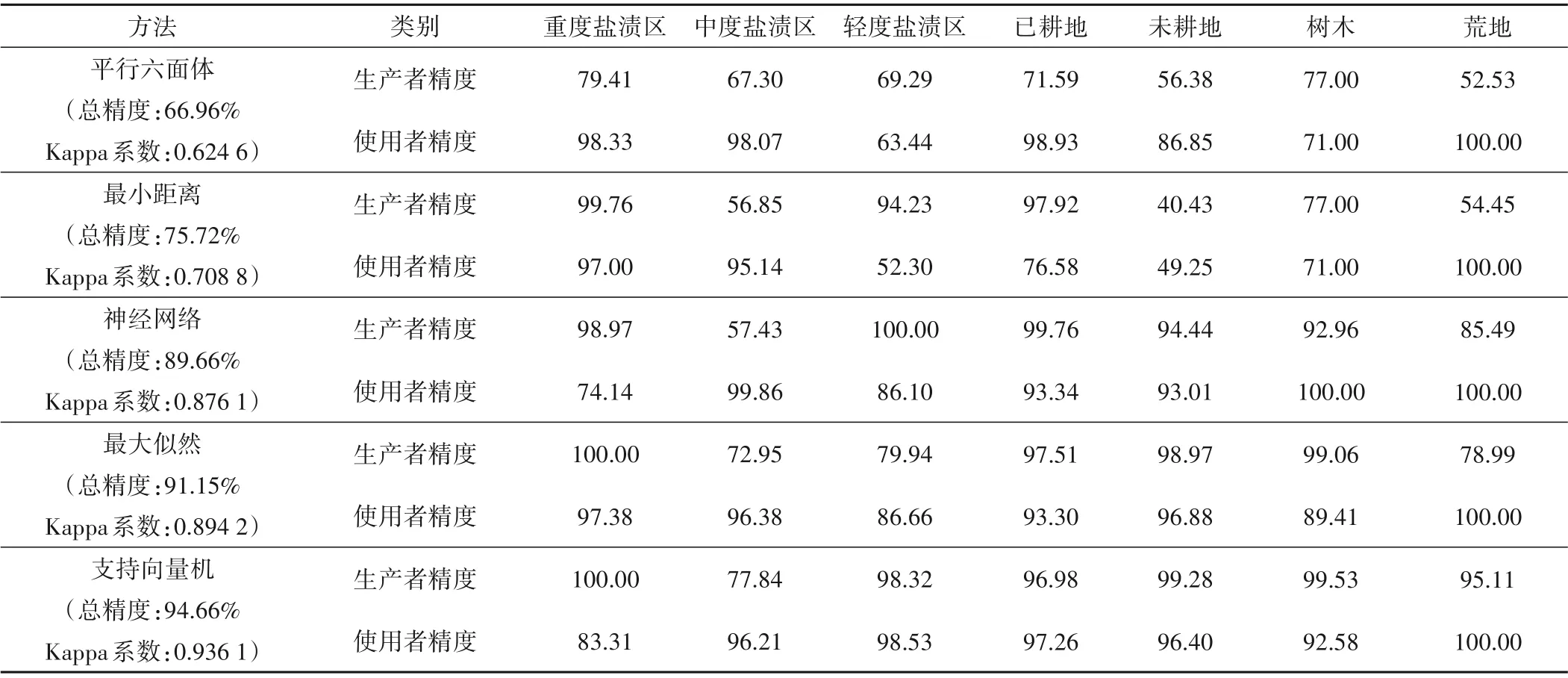
表3 区域1遥感影像分类精度%Tab.3 Classification accuracy of region 1 remote sensing image
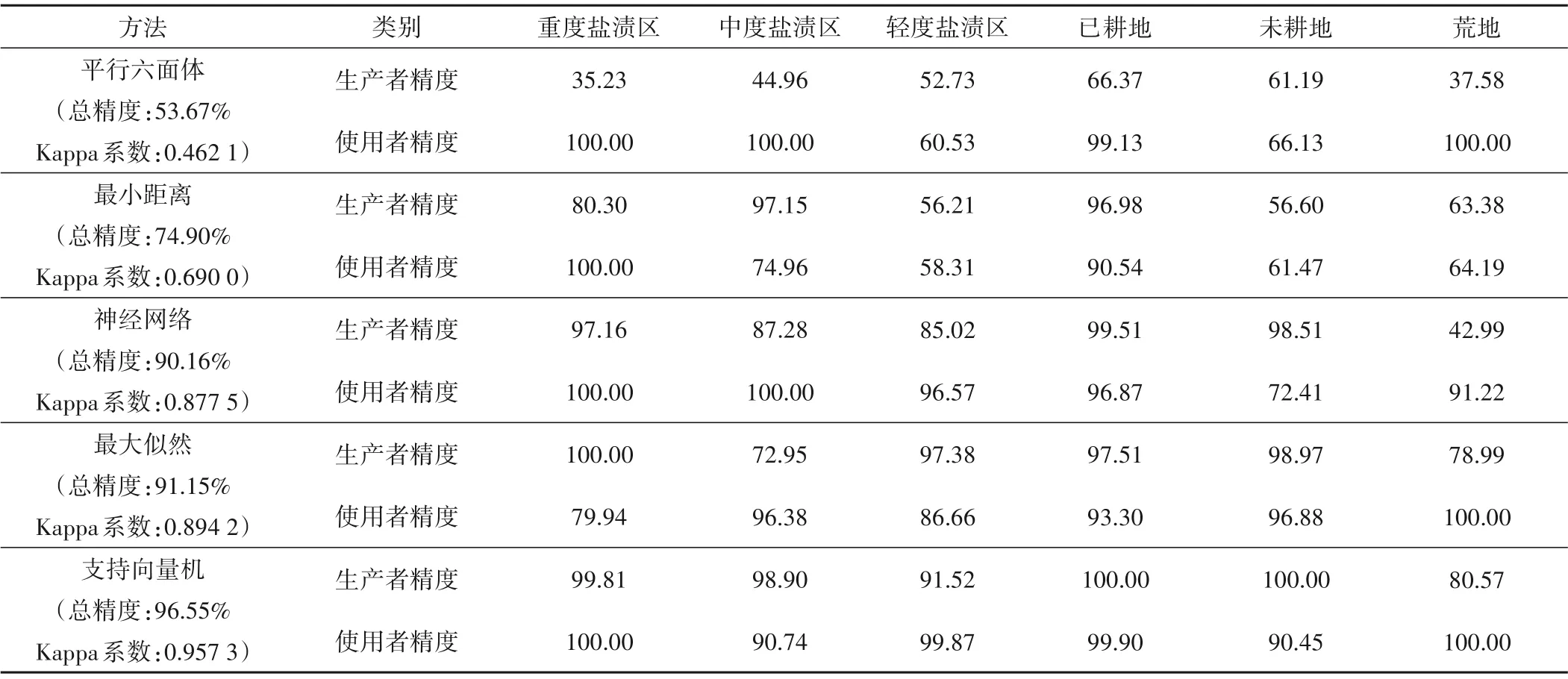
表4 区域2遥感影像分类精度%Tab.4 Classification accuracy of region 2 remote sensing image
总精度指被正确分类的像元与总像元数的比值,Kappa 系数是反映不同模型或分析方法在预测结果上与实际结果是否具有一致性的指标,其值越大则代表该模型或方法分类精度越高。两区域精度评价中从平行六面体到支持向量机总精度和Kappa 系数逐渐升高,总精度最高达96.55%,Kappa 系数最高达到0.957 3,区域1 中总精度提升了3.51%~27.7%,Kappa 系数提升了0.041 9~0.311 5;区域2 中总精度提升了5.4%~42.88%,Kappa系数提升了0.063 1~0.495 2。其中以耕地分类精度最高,其次是轻度盐渍区、未耕地块、重度盐渍区、重度盐渍区,荒地的分类精度最低。
2.3 盐碱地提取
使用ArcGIS 软件对上图中区域1、区域2 不同分类结果下每类地物的面积及占比进行提取,如表5、6所示。
应用分类精度最高的支持向量机法对区域1 和区域2 的各地物信息进行提取,结果如图5所示。
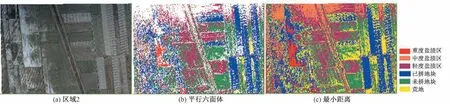
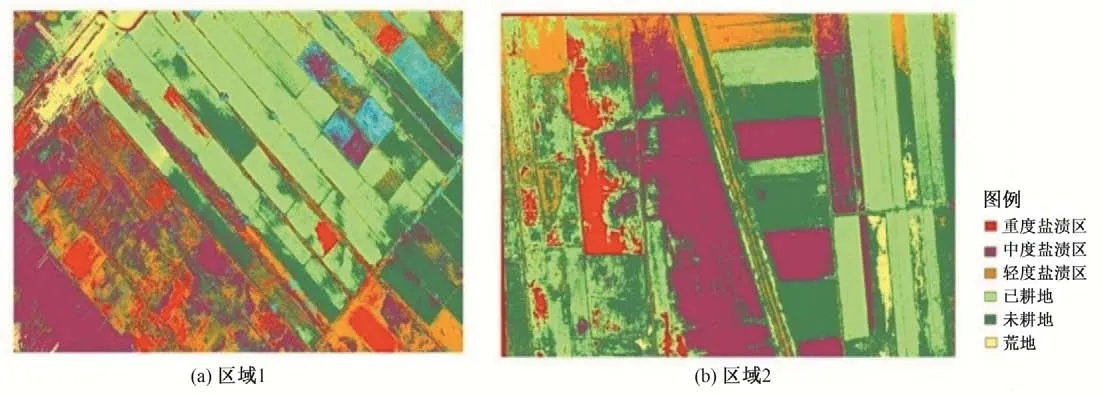
图5 区域1、区域2支持向量机法分类结果Fig.5 Classification results of region 1 and region 2 support vector machine
由表5、6 和图5可知,应用支持向量机法对两区域中各地物的面积占比随着分类精度的提高逐渐趋于稳定,区域1 中重度盐渍区占比在9.1%左右,面积为27 555 m2;中度盐渍区占比在18.8%左右,面积为56 714 m2;轻度盐渍区占比15.6%左右,面积为46 914 m2;区域2 中重度盐渍区占比约为5.6%,面积为8 736 m2;中度盐渍区面积占比8.4%左右,约占面积13 019 m2;轻度盐渍区面积约为22.1%,面积约34 471 m2;区域1 中盐渍区占比约43.5%,区域2 约36.1%。区域1 盐渍区中中度盐渍区较为显著,区域2中轻度盐渍区占比最大。
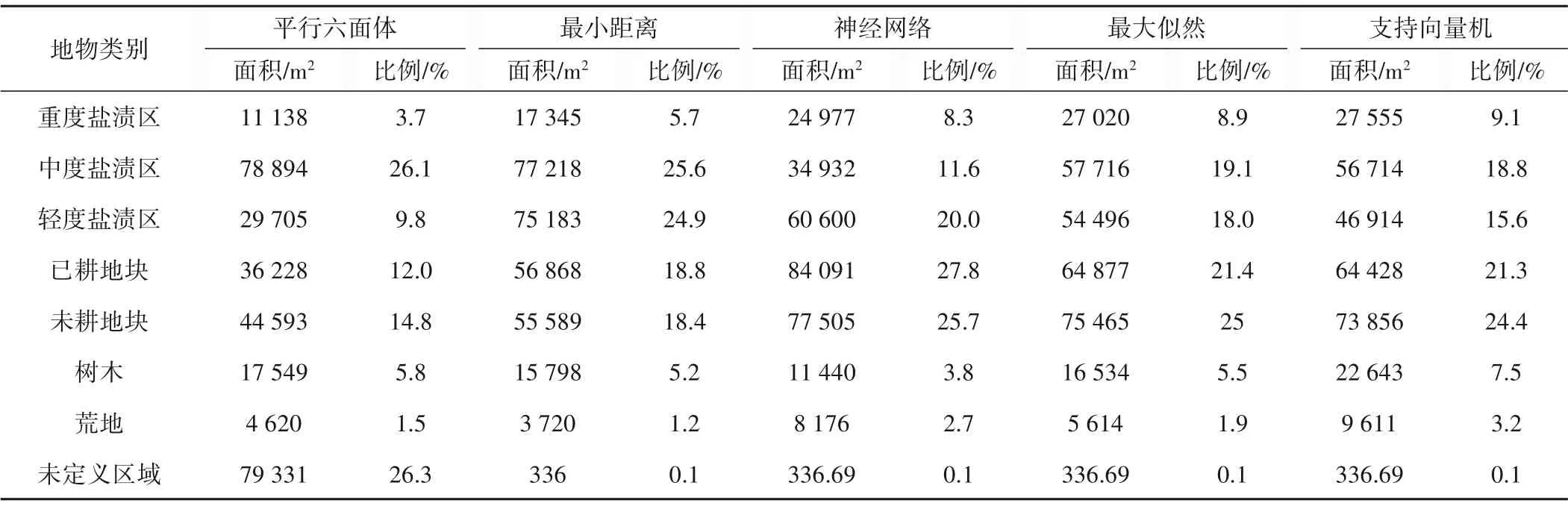
表5 区域1各分类结果面积占比Tab.5 Area ratio of each classification result in area 1
3 讨 论
当前传统航空航天遥感影像仍然是盐碱地信息获取和监测的主要手段,但存在采样周期长、空间分辨率和易受大气影响等问题,精确性和实时性均受限制,并不能及时地对盐碱地信息进行监测[14]。随着低空无人机和高分辨率传感器技术的发展,其拥有灵活性高、空间分辨率高和受气象影像小等特点,弥补了传统遥感的不足,这些优势使得无人机遥感技术在小区域应用方面的前景越来越广泛[15]。我国西北干旱荒漠区受人为因素和气象因素的影响,盐碱地分布范围广且类型复杂[16],将无人机遥感技术应用于盐碱地信息的精确提取已成为当前研究的热点。在目前的遥感分类方法中,常用的仍是如最大似然法、最小距离法和平行六面体法等传统的模式识别分类方法,其分类结果受遥感影像空间分辨率的高低和“异物同谱”或“同物异谱”等现象的影响,而容易出现较多的漏分或错分现象,影响地物分类的准确性[17-18]。近年来随着人工智能技术的发展,涌现出了一些新理论新方法,如神经网络法、支持向量机法等,其分类效果较传统的分类方法更加理想,主要由于在处理模式分类问题时,神经网络和支持向量机法不在基于某个假设的概率分布,而是在对训练样本学习的基础上,获得分类的权值,形成不同分类器,从而具有更高的容错性,能更好地处理遥感影像中的“异物同谱”或“同物异谱”问题,从而提高分类精度[19]。
但大量研究表明针对不同的研究区或研究对象其最优分类方法也是多变的,虽然本文支持向量机分类方法在盐碱地信息提取上效果最佳,无论是总精度或Kappa 系数均优于其他分类方法,其在地物边界和盐碱化程度分类上也比其他方法效果好,但由于真实地表地物的繁杂多变,会直接影响遥感影像本身采集的地物信息,进而导致分类效果差,所以在无人机遥感影像采集和精度校准技术中仍有许多问题值得我们探讨。
4 结 论
(1)利用研究区真彩色遥感影像,结合平行六面体、最小距离、神经网络、最大似然、支持向量机五种分类方法对影像内地物进行分类,通过混淆矩阵进行分类精度评价;结果表明,两区域地物分类中从平行六面体到支持向量机,支持向量机总体分类精度和Kappa系数均优于其他方法,各地物间分离度最高,具有较好的鲁棒性。
(2)通过ArcGIS 软件对区域1、2 不同分类结果下每类地物的面积及占比进行提取,两区域不同地物的面积占比随着分类精度的提高逐渐趋于稳定,同时表明支持向量机在分类较复杂的地物类型时具有较好的应用价值;从解译结果来看,两区域中重度和轻度盐渍区分布较为集中,中度盐渍区分布较为分散,由于灌区持续的不合理灌溉,盐渍化程度有进一步加重的趋势。
(3)采用监督分类对盐碱地信息进行提取,此类方法对样本有较大的依赖性,训练样本和验证样本的选取不同,可能会影响最终的分类结果和精度评价。□
