用于电源测试的馈能式交流电子负载的研究
2021-08-31安金龙刘祥洋
安金龙,刘祥洋
(1.河北工业大学电气工程学院 省部共建电工装备可靠性与智能化国家重点实验室,天津 300130;2.河北工业大学电气工程学院 河北省电磁场与电器可靠性重点实验室,天津 300130)
1 引言
电源设备在出厂之前需要进行带载实验以检测其性能[1]。传统的电源测试通常采用电阻、电容、电感及其组合的静态实物负载[2],存在负载变换不灵活、参数不稳定、能源浪费等一系列缺陷。为解决这些问题,国内外已有相关文献对能量回馈型交流电子负载进行了研究,并为交流电子负载主电路的结构奠定了基础[3],而控制部分则主要以DSP或单片机实现,由于它们的串行工作方式,将难以满足日益高频化的要求。
随着主电路的日益高频化,控制电路也迫切需要向高频化发展。FPGA(Field Programmable Gate Array)的并行处理结构和多通道输出能够以超过DSP几十倍的速度完成数字信号的处理和传输,其固有的高集成度、高速度、高精度等特点能够大大提高工作效率[4]。本文针对基于FPGA的馈能式交流电子负载进行研究,利用FPGA良好的高频性能实现对交流电子负载的精确控制,使其更好地满足电源出厂测试的带载要求。
2 馈能式交流电子负载的设计方案
馈能式交流电子负载的主要功能是按照要求精确控制被测电源输出端的电流幅值和相位,从而代替实际负载来满足被测电源的带载要求,并通过逆变并网方式将能量回馈给电网[5]。这种方式可以极大地减少能源的浪费和更好地提高不同负载实现的灵活性。交流电子负载的整体结构如图1所示。
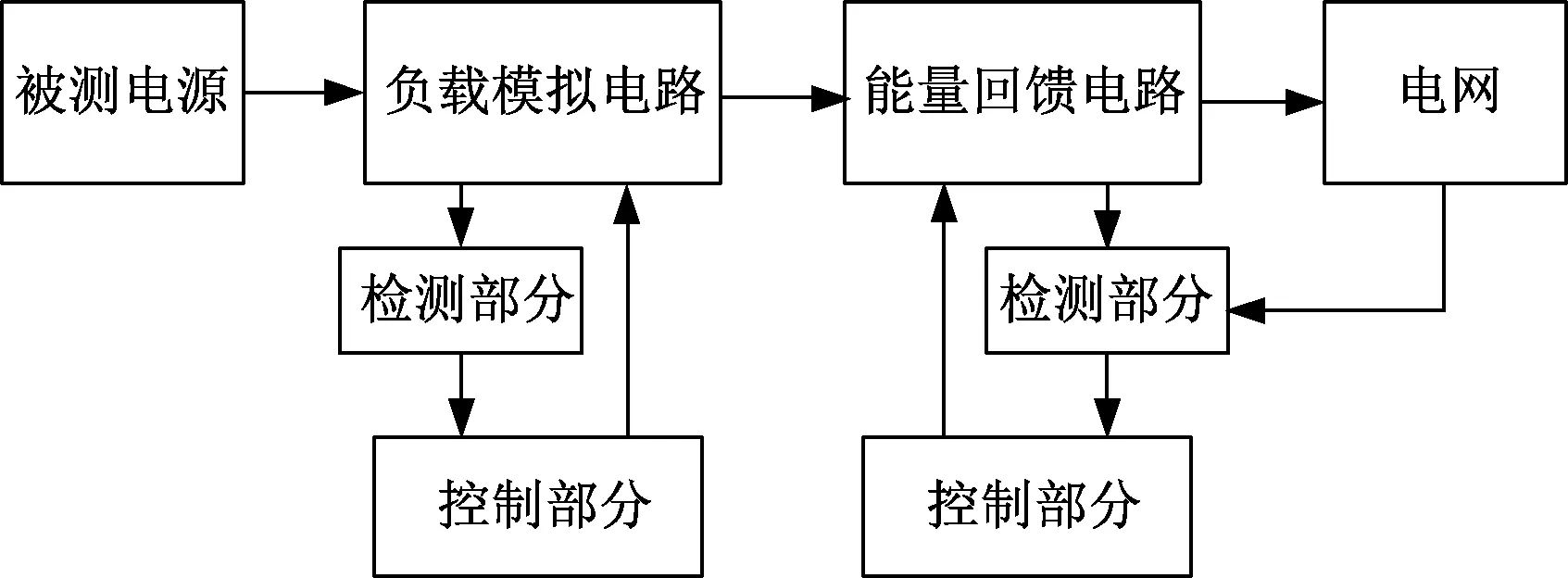
图1 交流电子负载整体结构框图Fig.1 Overall structure diagram of AC electronic load
馈能式交流电子负载主电路采用带LC谐波滤波器的背靠背式双电压型PWM变换器结构,其拓扑结构如图2所示。前级负载模拟电路实现模拟各种类型负载的功能,后级能量回馈电路实现逆变将电能回馈电网的功能。

图2 交流电子负载主电路拓扑Fig.2 Main circuit topology of AC electronic load
3 改进型SVPWM的研究
SVPWM调制是通过将对称三相电压合成一个旋转的空间矢量电压,再根据平均值等效原理,在一个开关周期内通过几个基本电压矢量的相互配合,使其合成矢量等效于此旋转电压矢量的调制方法[6]。SVPWM的空间矢量电压分布如图3所示。
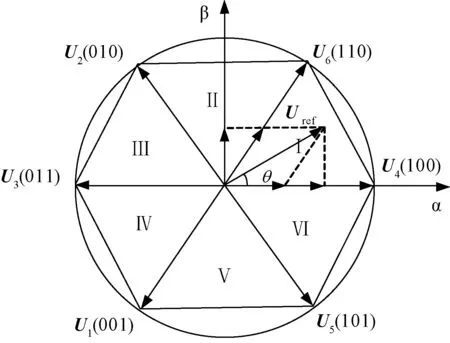
图3 空间电压矢量分布Fig.3 Distribution of space voltage vector
六个非零空间矢量大小相等,均为2Udc/3,方向依次相差60°,将运动轨迹圆等分为6个扇区。任意一个扇区中的参考矢量都可由该扇区的两个基本空间矢量合成表示。
以第一扇区为例,根据伏秒平衡原则可得:
UrefTs=U4T4+U6T6+U0T0
(1)
式中,Uref为参考电压矢量;Ts为开关周期;U4、U6、U0为基本电压矢量;T4、T6、T0为基本电压矢量作用时间。
在复平面中,根据正余弦定理和几何关系可得:
(2)
(3)
式中,θ为参考电压矢量与α轴夹角;Uα为分解到α轴的参考电压矢量分量;Uβ为分解到β轴的参考电压矢量分量。
又有U4=U6=2Udc/3,与式(2)、式(3)联立可得到各个基本电压矢量的作用时间为:
(4)
传统的SVPWM调制方法需要算出各个扇区的基本电压矢量作用时间,计算相对复杂,响应时间较慢。为方便运算,针对SVPWM调制,提出了一种改进的简化算法,大大降低了计算量。
如图4所示,六个扇区中的参考矢量大小相等,若将其分解到各自所在扇区的基本矢量上,分解后所形成的六个平行四边形具有全等关系,即所有四边形对应边的基本矢量作用时间完全相同。根据此关系,便可对所有扇区进行归一化处理。将其他扇区中的参考矢量统一归算到扇区1进行处理,则其他扇区各基本矢量的作用时间通过扇区1即可获得。

图4 参考矢量合成图Fig.4 Composite graph of reference vector
参考矢量的角度转换公式为:
(5)
式中,θ′为参考矢量转换到第一扇区后与α轴的夹角;N为扇区号。
又由式(4)可得扇区1中两基本矢量U4、U6的作用时间为T4、T6,再依据不同扇区中各矢量的作用顺序,得到各扇区基本矢量的作用时间见表1。

表1 各扇区中基本矢量的作用时间Tab.1 Action time of basic vector in each sector
采用改进型SVPWM的算法,对交流电子负载进行建模,并进行了仿真实验,将其结果与传统型算法的仿真结果进行了对比,结果如图5所示。

图5 直流输出侧电压波形Fig.5 Voltage waveforms of DC output side
从图5中可知,改进后的输出结果在精度没有下降的情况下,其响应速度有所提高。但是显著减小了算法的计算量,提高了计算速度。同时通过实验验证表明,程序运行时,传统型SVPWM需占用6 379个FPGA的逻辑单元,而改进型SVPWM只占用了4 284个FPGA的逻辑单元,其逻辑单元的占用量减少了近1/3,大大减小了FPGA实现控制算法的单元需求。
4 系统控制方案设计
4.1 指令电流的理论推导及实现方法
负载模拟侧主要是通过精确控制电流的幅值和相位来模拟电源实际负载。在模拟各种负载时,可以将给定的阻抗指令实时转换为电流指令。假设所模拟负载Z=R+jX,阻抗角为φz。
令三相电源的A相电压ua=Ucos(ωt+φu),则交流电子负载A相电流的指令瞬时值为:
(6)

经计算易知:
(7)
代入式(6)得:
(8)
同理可得B、C两相电流的指令值:
(9)
(10)

在模拟不同阻抗负载时,只需在程序中直接给定阻抗模值和阻抗角,便可实时计算出三相指令电流。该实现方法可以通过电压与电流关系实时自动调节电流指令大小,保持负载恒定不变,不受电源电压波动影响,可以更好地满足电源测试要求。
4.2 负载模拟电路的控制策略

图6 负载模拟电路控制框图Fig.6 Load analog circuit control block diagram
4.3 能量回馈电路的控制方式
能量回馈电路将负载消耗的能量回馈给电网以减少能源的浪费,达到节能的目的。采用SVPWM调制实现直流到交流的逆变。与传统的SPWM相比,该技术在性能、谐波抑制和电压利用率等方面均具有明显优势。基于FPGA实现的SVPWM模块结构如图7所示。

图7 基于FPGA实现的SVPWM模块结构Fig.7 SVPWM module structure based on FPGA
5 控制系统的FPGA实现
目前基于FPGA的控制算法主要是通过硬件描述语言编程实现,但是本文当中涉及大量的函数运算、积分运算、解耦运算和坐标变换等,计算量较大,编程难度较大,开发周期较长。为了缩短开发周期,本文针对另一种实现方式——Simulink模型转换FPGA代码的方法进行了深入研究。目前代码转换方法发展尚不成熟,普通Simulink模型无法成功转换。已转换模型还可能存在时序不满足要求、资源占用率高和烧录失败等问题。为解决以上问题,结合FPGA工作的特殊要求,对相关模块进行特殊设计,通过改变数据类型、调整模型结构和改进构造方法等措施,使其成功进行代码转换并降低寄存器的使用率。与直接编程方式相比,代码转换方式大大缩短了控制系统的开发周期。
5.1 适于代码转换的ADC驱动程序设计
硬件实验采用型号为LTC2308的模数转换器(ADC)将模拟量转换为数字量。对于ADC的驱动程序,可利用状态流模式对其实现。该型号ADC的驱动程序如图8所示。

图8 ADC驱动程序Fig.8 ADC driver
图8所示为ADC单通道采集程序,设置整个采样周期为5 000 ns,ADC时钟频率为5 MHz,将6位输入数据锁在前6个SCK的上升边缘,同时令12位输出数据在SCK的下降边缘进行转换。当数据全部转换完毕后,将所有变量置零并准备下一周期的采样工作。
5.2 控制算法的实现
根据第4节对系统进行的控制方案设计,基于FPGA对控制算法进行了实现,如图9所示。

图9 控制算法模块Fig.9 Control algorithm module
Simulink库中的某些模块不能满足代码转换要求,如锁相环模块、坐标转换模块和PI模块等,需要根据其原理进行重新搭建。为节约寄存器资源,提高程序运行速度,仿真模型全部采用固定点数据类型。而三角函数模块只能应用于浮点数据类型,故设计了查找表代替三角函数模块进行模型搭建的思路。在SVPWM模块的实现过程中,发现多端口选择器模块在FPGA运算时会占用大量资源,严重影响时序和运行效率,故设计了状态流模式代替多端口选择器工作,此方法大大降低了寄存器的使用,提高了代码转换速率和工作效率。此外,由于FPGA运行时内部资源的随机利用会导致不同的布线路径拥有不同的延时时间,进而导致竞争冒险现象的发生。为避免这一现象的出现,可以在延时较长的线路添加延时模块,使其满足时序约束要求。
5.3 适于代码转换的中断处理设计
进行数据采集与传输时,受采样时间和传输路径等多方面影响,会导致数据的不同步性,从而影响结果的准确性。为此,可通过中断操作使数据传输按节拍进行。图10和图11分别为中断程序和整体程序模型。
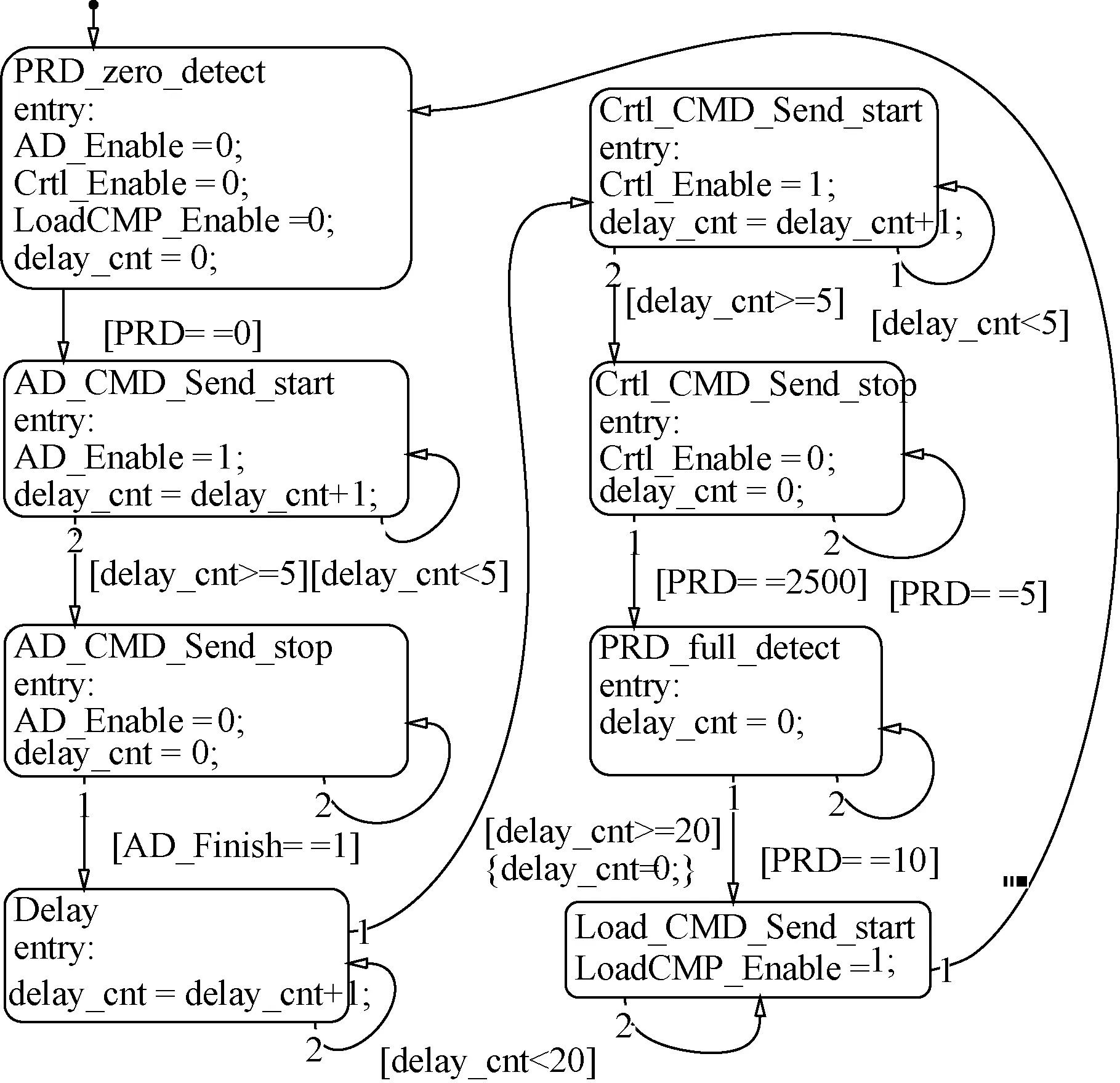
图10 中断程序Fig.10 Interrupt program

图11 整体程序模型Fig.11 Overall program model
通过图10所示中断程序可以对图11各个仿真模块进行控制。首先由中断程序给出使能信号启动ADC驱动模块工作;工作完成后,中断程序发出命令停止ADC工作并启动控制算法模块工作,当控制算法模块运算完成后将其停止并启动下一级模块工作;直至将数据传输到最后一级模块产生驱动信号为止;然后再进行新一轮的数据采集传输工作,如此循环,使程序有序稳定运行。
6 仿真研究
根据主电路拓扑结构和控制电路算法,利用Simulink仿真系统搭建交流电子负载模拟部分仿真电路模型,具体参数如下:三相测试电源电压为220 V,频率为50 Hz;交流侧谐波滤波器电感L1~L3为2 mH,电容C1~C3均为1 μF;直流侧电容C为6 600 μF,电阻R为50 Ω。采用MOSFET作为功率开关器件以适应高频工作环境。整体仿真模型如图12所示。

图12 交流电子负载Simulink仿真模型Fig.12 Simulink simulation model of AC electronic load
通过设置不同的阻抗模值和阻抗角便可对不同类型的负载进行模拟,其仿真情况如图13所示。

图13 模拟纯阻、阻容、阻感负载时仿真波形Fig.13 Simulation waveforms of pure resistance,resistance capacitance and resistance inductance load
图13(a)、图13(b)、图13(c)分别是纯阻性负载(|Z|=100,φz=0°)、阻容性负载(|Z|=100,φz=-45°)及阻感性负载(|Z|=100,φz=45°)时电源输出端A相电压和电流的仿真波形。由以上波形可知,此交流电子负载电路可满足电源负载要求,证明了该种适于代码转换的模型及其控制算法的正确性和可行性。
7 实验验证
为了实现基于FPGA控制的用于电源测试的馈能式交流电子负载,验证基于FPGA实现的可行性和控制算法的正确性,搭建了如图14所示的小功率硬件实验电路平台。各硬件参数与仿真参数相同,交流侧谐波滤波器电感为2 mH,电容为1 μF,直流侧电容为6 600 μF,电阻为50 Ω。由于实验设备主电路耐压等级的限制,进行了降压实验,在进行负载模拟时设置三相测试电源电压为70 V,其输出功率在负载阻抗角等于0°时为147 W。

图14 实验平台Fig.14 Experimental platform
将图11所示程序模型转换成硬件描述语言并烧录到FPGA芯片中,该实验平台便可通过输入阻抗模值与阻抗角,精确地实现电源要求的负载。实验中阻抗模值与阻抗角的设置与仿真相同,得到图15所示的实验波形。图15(a)、图15(b)、图15(c)分别是纯阻性负载(|Z|=100,φz=0°)、阻容性负载(|Z|=100,φz=-45°)及阻感性负载(|Z|=100,φz=45°)时电源输出端A相电压和电流的实验波形。电压波形数据在电压探头处于×10倍档时显示。电流波形数据通过电流探头获得,电流探头的转换比为100 mV/A。该实验结果证实了负载模拟侧控制策略和基于FPGA实现的可行性。

图15 模拟纯阻、阻容、阻感负载时实验波形Fig.15 Experimental waveforms of pure resistance,resistance capacitance and resistance inductance load
基于FPGA实现了能量回馈部分以SVPWM作为调制方式的控制电路,进行了能量回馈实验,逆变输出波形如图16所示。输出电压为70 V,频率为50 Hz,后续再经过升压变压器将电压升至220 V即可进行并网操作。实现了开关频率分别为10 kHz和100 kHz时的逆变输出,验证了FPGA良好的高频性能。如果主电路允许的话,本方法可以实现更高开关频率的控制电路。

图16 10 kHz、100 kHz时的逆变输出波形Fig.16 Inverter output waveforms at 10 kHz and 100 kHz
综上所述,本文基于FPGA成功实现了控制电路高频化的馈能式交流电子负载,达到了电源带载测试既节能又精确的目标要求。
8 结论
本文针对基于FPGA的馈能式交流电子负载进行研究,提出了SVPWM的改进算法。在控制策略方面,根据指令电压、指令电流和模拟负载的关系,设计了一种给定指令阻抗的电流单闭环控制方式,实现了对任何需要的交流电子负载的精确控制。通过Simulink仿真验证了此控制策略的正确性。在FPGA硬件实现中,对ADC驱动、中断、控制算法等模块进行了特殊设计,实现了Simulink模型到VHDL程序代码的转换,大大减小了系统的开发周期。设计了FPGA控制核心和硬件电路实验平台,实现了用于电源测试的馈能式交流电子负载。
