基于机器视觉的车辆检测
2021-08-28杜学峰
杜学峰,高 越,杨 伟,张 勇
(长安大学 汽车学院,陕西 西安 710064)
关键字:OpenCV;Adaboost 算法;自动驾驶;车辆检测
引言
随着车辆数量的增加,交通状况也愈加复杂,从而导致车辆安全性尤为重要。在一些突发状况或是驾驶员注意力不集中的情况下,我们很难对即将发生的事故作出正确的判断及有效反应。基于车辆自身对前方车辆的检测是一项较为基础的技术,其广泛应用于自动巡航,防碰撞系统中,可帮助驾驶员对路面环境进行有效的判断。
目前一般使用各种传感器进行前方车辆的识别,如激光、雷达、摄像头等,其各有优缺点。在汽车行驶时,路面状况瞬息万变,这就要求在检测前方车辆时要具有较高的实时性及准确性。同时,为了能使该系统能在各种环境下都能正常工作,其应该具有良好的鲁棒性。本文设计了一种基于机器视觉的方法,通过使用OpenCV 库及Adaboost 算法,实现了对前方车辆的检测[2-3]。
1 分类器的训练
1.1 样本采集
训练分类器需要采集大量样本。样本分为正样本和负样本。其中,正样本是我们需要检测的对象及车辆的图片,负样本是不含有需要检测的对象的任意图像。样本图片可从网上下载或拍摄获得。以下分别为一些训练用正样本和负样本的图片。

图2 训练所用负样本
1.2 车辆特征提取
特征是某一类物体或事物所共有的一种属性和标志,通过计算机对车辆特征的提取,实现将车辆从图片中分理出来的目的。想要达到这个目的,车辆特征的选取合适与否至关重要。本文对于车辆的检测和识别是基于Haar-like 特征实现的[4-5]。其包括以下几种类型:
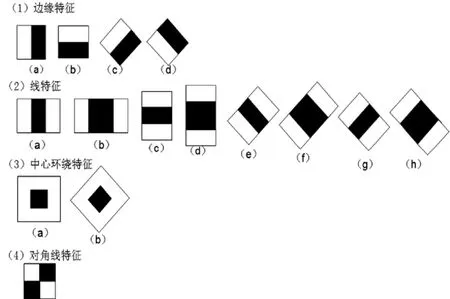
图3 不同类型的Haar-like 特征
在图像中,Haar-like 特征的计算原理为:首先计算白色矩形所包含的像素之和及黑色矩形所包含的像素之和,然后计算出它们的差值。所得到的值即为Haar-like特征的特征值。本文中,采用积分图的方法进行特征值的计算。
1.3 车俩检测分类器的训练
在上文所提到的样本中,积分图计算后可以提取出很多矩形特征。本文采用Adaboost 算法识别车辆的Haar-like 特征,它的基本原理是,对于一个样本集,训练出多个弱分类器,然后把它们组合起来,这样就构成了一个强分类器。实现过程如下:(1)将训练样本中的各个元素所占有的权值调成相同的,即如果有N 个样本,则每个样本的权值为1/N;(2)训练弱分类器;对于第一个弱分类器,将全部样本分类过后,把其中成功分类出来的样本所占的权值减小,未成功分类的样本的权值增加,改变过样本权值后的新的训练集用来训练第二个弱分类器,重复此步骤,训练出需要的多个弱分类器;(3)将得到的弱分类器进行级联,形成强分类器,其中,每个弱分类器对于车辆检测的误差不同,通过计算它们的误差,可以得知哪些弱分类器的误差较小,所以在组合成的强分类器中,提高这类分类器所起到的作用,即增加它们在强分类器中所占的权值。可以减小车辆的误检率[6]。流程图如下:
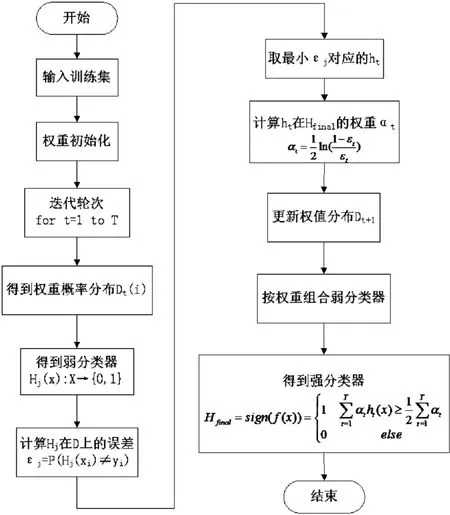
图4 Adaboost 级联分类器训练流程
基于该原理,使用OpenCV 库对样本进行灰度化、去噪等一系列预处理后,对其进行训练得到各级车辆分类器。

图5 训练所得的分类器
2 前方车辆检测实验
分类器训练完成并通过测试后,在各种户外条件下进行车辆识别检测。以检验通过使用Haar-like 特征的Adaboost级联分类器对车辆的检测效果。部分结果如下图。
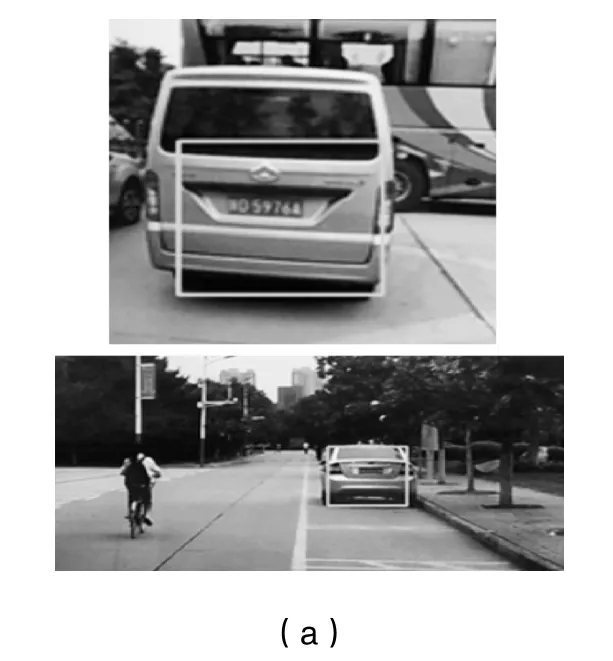
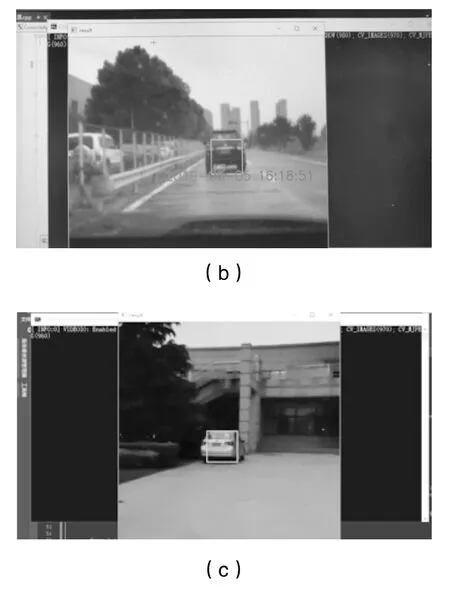
图6 实验结果
3 总结
对样本预处理后训练得到的分类器进行实验,通过导入了外部视频和接入摄像头两种方法在长安大学校内实验,得出以下结论:该分类器具有良好的实时性及鲁棒性,基本可以对前方车辆做出准确识别。
