旋转条件下非连续卫星导航信号处理技术
2021-08-24袁赫良曲家庆吕红丽
袁赫良,金 天,曲家庆,吕红丽
(1.北京航空航天大学电子信息工程学院,北京 100083;2.上海无线电设备研究所,上海 201109;3.中国电子科技集团公司第二十研究所,陕西 西安 710068)
0 引 言
全球卫星定位系统的高精度、全天时、全天候的特点使其在民用和军用领域具有广泛的应用价值[1]。针对旋转载体的定位是当前卫星导航技术研究的热点[2-5],譬如火箭、导弹、炮弹等在飞行过程中会以不同转速进行自旋转运动,从而实现载体姿态控制。但载体的自旋转运动会对卫星导航信号的接收产生影响,造成信号的非连续现象。
目前,利用卫星导航技术实现旋转载体定位是一种常用技术手段,相比于采用传感器方式[6-11],其具有易实施,效费比高,抗过载性更好等特点,而惯性传感器则需要进行初始对准,且微小测量误差通过积分累计都将出现极大误差。卫星导航技术被应用到旋转载体中主要分为单天线方式和多天线方式。单天线方式是在旋转载体侧面安装一个信号接收天线,但无法解决由于旋转导致的信号非连续问题。国外学者对此已进行了多年研究,主要通过加入旋转跟踪环路解决旋转对接收信号的影响。例如,Doty团队开发出的ASVN组件,在接收机传统闭环跟踪环路基础上加入旋转相位跟踪环路,一方面消除旋转效应对接收机的影响,另一方面测量旋转效应产生的相位增量,进而对旋转载体的转速进行估计[12-13]。Kim 等人提出的方法也是在传统闭环跟踪环路基础上加入旋转相位跟踪环路,但鉴别方法与Doty提出的方法不同[14]。Luo则是利用扩展卡尔曼实现旋转相位跟踪环路,因而具有更好的跟踪效果[15]。曾广裕将矢量结构应用到旋转载体的定位中,并增加锁相环跟踪旋转相位。Shen则是将免时定位方法[16-17]应用到旋转非连续信号处理中,提出了基于亚毫秒伪距的定位方法[18-19]。以上方法中无论是利用传统闭环跟踪环路获得导航参数进而实现定位还是利用矢量跟踪实现定位,信号的非连续接收都将使得跟踪环路在失锁或迁入状态到跟踪状态之间频繁切换,无法实现稳定跟踪,进而对定位产生影响。在转速测量方面,上述方法均是利用增加独立的旋转相位跟踪环路获得旋转相位进而对转速进行计算,但从信号相位中仅提取出旋转相位是比较困难的,并且计算过程需要卫星与天线平面的角度信息辅助。Alexander和Deng对受到转速调制的信号幅值进行解调从而实现转速估计[20-21]。Hong等人利用接收信号载噪比最大时载体坐标系下的卫星和接收机视距矢量中y轴坐标值为零实现转动角度计算[22]。但信号幅值或估计载噪比极值受噪声等因素影响较大,这将影响到转速的估计精度。
多天线方式则是在旋转载体同一横截面上等间距安装多个天线,从而使得任意时刻总有至少一个天线接收到卫星信号。Im分析了多天线合路信号的信号特征[23],并在另一篇文章中提出了相位补偿式的信号跟踪方法[24]。刘旭东对旋转条件下多天线的可见性进行了分析,并指出4个天线能够保持任意时刻足够多的卫星接收[25]。Fenton提出利用双天线信号合成的方式实现定位,并利用对称分布天线的相位差实现转动信息估计[26]。蔡乃小则提出利用对称双天线的多普勒频率实现转速估计[27]。Wallace则是利用四天线合成信号实现定位,并利用相位差对转速进行估计[28]。上述方法均是将多天线接收信号进行合路处理,但合路信号中各个天线间信号极易出现相互干扰,并且合路信号噪声相比于单路信号噪声有所增加。
本文提出了一种基于多天线结构的开环差分卡尔曼定位方式,并利用相邻天线间共视卫星的多普勒频率差实现转速估计。开环跟踪结构中不存在反馈支路,并以快拍的方式实现对卫星信号的跟踪,具有完全稳定的结构和动态适应性,能够实现信号非连续条件下的导航参数估计。利用差分卡尔曼滤波对开环跟踪结果实现滤波和位置速度解算。根据文献[25]中对多天线结构下卫星可见性的分析,本文采用四天线结构。另一方面,由于本文方法利用相邻天线间共视卫星的多普勒频率差值计算转速,不需要卫星与天线平面的角度信息辅助,计算过程简单高效。
1 开环差分卡尔曼及转速估计方法
旋转载体利用安装在载体同一横截面上的4个天线接收卫星信号如图1所示,各个天线接收的每个卫星信号利用开环跟踪通道进行单独跟踪。因为载体的旋转,同一时刻各个天线的跟踪通道对同一颗卫星的跟踪情况不同,有些天线对卫星信号能够实现跟踪,而有些天线跟踪的则是噪声。同时,载体旋转产生的旋转多普勒使得不同天线接收信号的多普勒频率也存在差异。故而需要对不同天线的跟踪结果进行融合,从而判定天线跟踪状态,削弱旋转多普勒影响。之后,利用差分卡尔曼对各个卫星的跟踪结果进行滤波,进而实现定位。另一方面,根据不同天线对卫星信号的可见性,利用频率闭环跟踪环路对可见卫星信号的多普勒频率进行精确跟踪,并且将差分卡尔曼滤波得到的多普勒频率作为初始值辅助频率闭环跟踪环路实现快速锁定,进而利用相邻天线间多颗共视卫星的多普勒频率差值对转速进行计算。算法整体框架图如图2所示。

图1 天线安装示意图Fig.1 Diagram of antenna installation

图2 算法整体框架图Fig.2 Overall framework of algorithm
1.1 基于开环结构的非连续信号跟踪方法
传统跟踪环路利用闭环反馈结构逐渐消除接收机本地生成信号与接收信号之间的状态差异,但在复杂环境下,反馈控制回路的修正常常滞后于输入信号的快速变化而造成环路失锁。开环跟踪则是直接以精捕获的方式对信号进行处理,从而获得信号的码相位和多普勒频率信息,且跟踪结构中不存在反馈回路。
在开环跟踪中,首先设定码相位搜索范围和多普勒频率搜索范围,然后根据不同的搜索间隔遍历产生本地信号与接收信号进行相关,最后通过相关结果的最大值确定码相位和多普勒频率。
接收到的GNSS信号的数学模型如下:
r(k)=AkD(k)C(τk)cos(2πfdk+φ)+n(k)
(1)
式中:Ak是信号幅值;D(k)为导航信号电文;C(τk)为伪随机码;fd为多普勒频率;φ为初始相位;n(k)为高斯白噪声。对于本地搜索间隔内第i个多普勒频率fk,i和第j个伪码相位τk,j分别为
(2)
式中:fk和τk分别为k时刻搜索的初始多普勒频率和初始码相位;fstep和τstep分别为多普勒频率和码相位搜索步进;frange和τrange分别为多普勒频率和码相位的搜索范围。接收信号与本地复现信号的同相支路相干积分结果I(k)和正交支路相干积分结果Q(k)分别为
(3)
式中:R(Δτk)是伪码自相关函数;Δτk是码相位误差;Δfk是多普勒频率误差;Δφk是载波相位误差;Tcoh是相干积分时间;nI,k和nQ,k为不相关白噪声。
在不考虑噪声的情况下,开环跟踪结果的复值I(k)+jQ(k)的幅值|Z(k)|为
(4)
当本地信号与接收信号匹配时,|Z(k)|最大,最大值所对应的参数即为第N颗卫星的码相位和多普勒频率开环跟踪结果:
(5)
根据开环跟踪结果,对不同天线跟踪结果进行融合。具体来说,4个天线对同颗卫星跟踪结果的融合方式有以下4种情况:① 当只有1个天线跟踪通道的信号强度超过设定阈值时,此时天线旋转运动接近垂直于接收机和卫星径向方向,旋转引起的多普勒干扰最小,并且相干积分过程又可以进一步削弱旋转多普勒的影响,此时跟踪结果即为融合结果;② 当有2个天线跟踪通道的信号强度超过设定阈值时,这2个天线相对于卫星的旋转运动相反,将跟踪结果的幅值作为权重值对两通道跟踪结果进行加权融合;③ 当有3个天线跟踪通道的信号强度超过设定阈值时,同样利用幅值进行加权融合;④ 当有4个天线跟踪通道的信号强度超过设定阈值时,说明阈值设定不合理,更新阈值重新进行判断。
1.2 基于差分卡尔曼滤波的定位方法
差分卡尔曼滤波[29]是以相邻时刻间接收机状态量的差分值进行建模,即状态量为相邻时刻间位置、速度、加速度、钟差、时钟频漂的差分值,观测量为相邻时刻间码相位和多普勒频率的差分值。鉴于相邻时刻观测量中的公共误差具有短时相关性,从而差分值建模可以有效地消除公共误差。
1.2.1 状态模型
通常,接收机的状态量如下所示:
Xk=
[xk,yk,zk,bk,vxk,vyk,vzk,dk,axk,ayk,azk]T
(6)
式中:xk,yk,zk为地心地固坐标系(earth-centered earth-fixed,ECEF)下三维位置;vxk,vyk,vzk为ECEF坐标系下三维速度;axk,ayk,azk为ECEF坐标系下三维加速度;bk为接收机钟差;dk为接收机时钟频漂;下角标k代表k时刻。
差分卡尔曼滤波的状态量则是基于相邻两个时刻间状态量的差分值,具体如下:
ΔXk=Xk-Xk-1=
[Δxk,Δyk,Δzk,Δbk,Δvxk,Δvyk,Δvzk,
Δdk,Δaxk,Δayk,Δazk]T
(7)
状态方程如下所示:
ΔXk+1=Φ1×ΔXk+W1
(8)
式中:状态转移矩阵Φ1为
(9)


1.2.2 量测模型
差分卡尔曼滤波的量测模型为
ΔZk+1=H1×ΔXk+1+N1
(10)
(11)
式中:
N1为量测噪声;H1为量测矩阵;λC为伪码波长,λφ为载波波长;ei=[αi,βi,γi,1],[αi,βi,γi]为接收机与第i颗卫星的单位径向矢量。接收机首先利用传统闭环跟踪结构获得接收机初始状态量解算,之后切换到开环差分卡尔曼结构进行跟踪、滤波和差分定位估计,获得的差分定位结果与上一时刻接收机状态量共同得到当前时刻状态量。
1.3 基于相邻天线间多普勒频率差值的转速估计方法
利用相邻天线对同颗卫星的多普勒频率差值实现转速计算。当获得可见卫星信号的准确多普勒频率后,即可对转速进行求解。旋转载体接收信号的多普勒频率与卫星运动,载体平动和旋转运动之间的关系如下:
(12)

(13)
计算相邻天线i和j的多颗共视卫星信号的多普勒频率差,然后利用最小二乘算法即可求出(Vr,i-Vr,j)。假设,旋转载体半径为r,转速为fr,且相邻天线的旋转速度矢量Vr,i和Vr,j的模值相同(‖Vr,i‖=‖Vr,j‖=2πrfr),方向垂直,则转速与(Vr,i-Vr,j)模值的关系如下:
(14)
利用式(14)即可求出载体转速。
对天线中卫星信号的准确多普勒频率估计采用基于卡尔曼滤波的闭环跟踪环路,其中卡尔曼滤波状态模型,观测模型,状态转移矩阵Φ2和观测矩阵H2分别如下:
δXk+1=Φ2×δXk+W2
(15)
δZk+1=H2×δXk+1+N2
(16)
(17)
(18)
式中:δXk=[δφ,δf,af]T为状态矢量;δφ为载波相位误差;δf为多普勒频率误差;af为多普勒频率变化率;W2为系统驱动噪声;N2为量测噪声;观测量δZk+1为载波相位鉴别结果。
2 实验与结果分析
第1节详细阐述了旋转状态下的信号跟踪与定位算法,并对转速估计方法进行了说明。本节通过开展模拟信号实验和实际信号实验,对所提出算法进行实验验证和结果分析。
2.1 模拟信号实验
利用信号软件仿真系统对高转速载体接收信号进行模拟仿真。仿真中转速设定为20 rps,旋转信号的仿真模型参见文献[30],信号载噪比范围为40~43 dB·Hz。首先,对载体非旋转条件下的各天线接收信号进行模拟,之后模拟载体旋转条件下的各天线接收信号。以卫星11为例,图3为各个天线接收该卫星信号的多普勒频率模拟结果,图中从上到下分别对应1~4天线,其中0~60 s载体非旋转,60~100 s载体旋转。图3中,左侧4个图为1~4天线多普勒全时段图,右侧4个图则为某些时刻图。从图3中可知,非旋转状态下只有天线1和天线4能接收到卫星11信号,当载体旋转后,各个天线对卫星11的可见性随时间周期性变化,并且多普勒频率开始周期性出现和周期性波动。

图3 四天线接收11号卫星信号多普勒模拟结果Fig.3 Doppler simulation results of satellite No.11 with four antennas
载体非旋转时,接收机采用传统闭环跟踪环路对信号进行跟踪,从而实现电文解算和初始定位;当载体转动时,接收机切换到开环差分卡尔曼结构进行信号跟踪和定位,同时计算转速。开环跟踪中相干积分时间为1 ms,非相干累加20次。图4是所提方法和四天线闭环跟踪结构接收机的可跟踪卫星个数对比图。从图4中可知,由于载体旋转导致信号出现中断,使得传统接收机需要一定时间进行重捕获和重跟踪,故而可连续跟踪卫星数较少;本文所提方法在高转速旋转条件下仍然能够持续跟踪到足够的卫星个数。
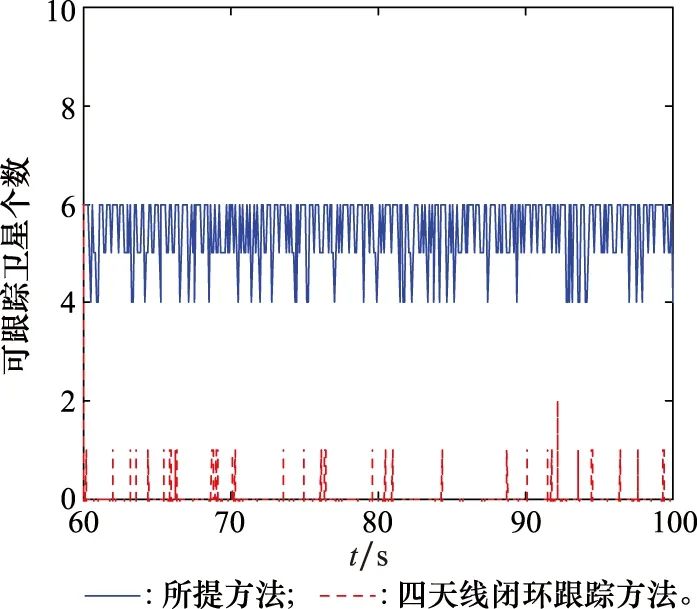
图4 模拟信号实验可跟踪卫星个数对比Fig.4 Comparison of the number of tracking satellites in simulation signal experiment
图5是利用开环差分卡尔曼结构定位的三维位置误差结果图,在ECEF坐标系下的三维位置误差的标准差为:1.3 m,2.3 m,1.1 m。图6是三维速度误差结果图,三维速度误差的标准差为:0.8 m/s,1.3 m/s,0.7 m/s。从图5和图6中可知,所提算法能够适应高转速条件,持续输出良好的定位定速结果。

图5 模拟信号实验三维位置误差Fig.5 Three-dimensional position error in simulation signal experiment
为了估计转速,需要对卫星信号的多普勒频率进行准确测量。采用基于卡尔曼滤波的闭环跟踪环路对多普勒频率进行测量时,滤波周期设定为1 ms,且将开环差分卡尔曼滤波获得的多普勒频率作为闭环跟踪环路的初始值辅助其快速锁定。考虑到闭环跟踪环路从初始化到稳定跟踪需要一定的时间,本文采用相位锁定指示器作为闭环跟踪是否稳定的标志,门限设定为0.8。同时,指示器结果也反映了闭环跟踪环路跟踪结果的好坏。综上所述,开环差分卡尔曼滤波得到的多普勒频率作为闭环跟踪环路的初始值;根据锁定指示器结果判定闭环跟踪结果的好坏,当闭环跟踪环路无法准确跟踪信号时,则利用开环差分卡尔曼滤波得到的多普勒频率重新初始化闭环跟踪环路。图7为转速估计结果统计图。从图7中可知,转速估计结果在20 rps附近波动,标准差为0.95 rps,所提算法能够对高转速实现有效的估计。

图6 模拟信号实验三维速度误差Fig.6 Three-dimensional speed error in simulation signal experiment

图7 模拟信号实验转速估计结果Fig.7 Roll rate estimation in simulation signal experiment
2.2 实际信号实验
实验中采用一台立式单自由度转台模拟旋转载体,转台最大转速1.5 rps,转台四面安装4个卫星信号接收天线,转台与地面夹角约为60°,从而模拟载体旋转中不同天线对卫星信号的不同可见性。采集器分别对各个天线接收信号进行独立采集,然后对各天线采集到的中频数据进行处理。实验系统示意图如图8所示。

图8 单自由度转台实验示意图Fig.8 Schematic diagram of single axle table
实验中,转台0~60 s处于非旋转状态,接收机采用传统闭环跟踪结构实现电文解算和初始定位;之后60~100 s,转台以1.5 rps的速率进行转动,同时接收机切换到开环差分卡尔曼结构进行信号跟踪和定位,同时计算转速。其中,中频数据采样率为31 MHz,开环跟踪相干积分时间为1 ms,非相干累加20次。
图9是旋转条件下所提方法和四天线闭环跟踪结构接收机的可跟踪卫星个数对比图。从图9中可知,所提方法在低转速旋转条件下也能够保持跟踪到足够的卫星个数。

图9 实际环境中可跟踪卫星个数对比Fig.9 Comparison of the number of tracking satellites in real environment
图10是利用开环差分卡尔曼结构定位的三维位置误差结果图,在ECEF坐标系下的三维位置误差的标准差为:1.1 m,2.1 m,2.0 m。图11是三维速度误差结果图,三维速度误差的标准差为:1.5 m/s,1.9 m/s,1.8 m/s。从图11中可知,所提出的算法在低转速旋转条件下仍然能够实现良好的定位和定速精度。图12为转速估计结果统计图。从图12中可知,所估计的转速结果在1.5 rps上下波动,标准差为0.7 rps。故而,所提算法也可以对低转速进行有效的估计。

图10 实际环境中三维位置误差Fig.10 Three-dimensional position error in real environment

图11 实际环境中三维速度误差Fig.11 Three-dimensional speed error in real environment

图12 实际环境中转速估计结果Fig.12 Roll rate estimation results in real environment
3 结 论
为解决旋转载体场景下的定位问题,本文提出一种基于四天线结构的开环差分卡尔曼定位方法。开环结构实现了在旋转非连续条件下的信号观测量获取,差分卡尔曼滤波则对开环跟踪结果进行滤波,并实现定位解算。同时,本文还提出了一种利用相邻天线间多普勒频率差值的转速计算方法。从多普勒频率差值中可以有效地提取出旋转运动引入的旋转多普勒分量,从而实现转速估计。模拟信号和实际信号的实验结果表明,无论在20 rps的高转速条件下还是在1.5 rps的低转速条件下,所提算法均可实现载体的高精度定位,并且能够对不同载体转速进行有效估计,且估计误差的标准差不超过1rps。本文为利用卫星导航技术解决旋转载体场景下的定位问题与转速估计问题提供了一种全新思路。