基于交替下降条件梯度的前视成像
2021-08-24息荣艳黄天耀张广滨刘一民
息荣艳,黄天耀,张广滨,王 磊,刘一民
(清华大学电子工程系,北京 100084)
0 引 言
高分辨前视成像(high resolution forward-looking imaging,HRFLI)在军事和民用方面有很多重要的应用,比如机载雷达、探地雷达、车载雷达等[1-3]。其中,距离高分辨率需要宽带信号,方位高分辨率需要大天线孔径。通常采用宽带信号和大孔径获得距离和角度的二维高分辨图像。微波遥感的高分辨率技术,如合成孔径雷达和多普勒波束锐化,已经在雷达侧视方向上得到了很好的发展,但在雷达前视方向上孔径受限,实现高分辨成像是一项具有挑战性的任务。另外,受硬件资源有限或资源分配[4]的影响,实际场景中存在很多观测数据缺失的情况,比如雷达通信一体化场景[5-6]、步进频场景[7]和频率捷变相关应用[8-10]等。因此,如何在数据缺失场景下实现高分辨成像是一大难点。
传统的成像算法如反投影(back-projection,BP)[11]是通过对所有空间和时间测量的相干处理获得空间和时间的二维分辨,从而得到二维雷达图像,但BP类算法图像存在分辨率低、旁瓣高的问题。
在文献[12-14]中,谱估计方法被应用到二维参数估计中。通过将雷达回波建模为二维谐波信号的总和,进行子空间分析,获得频率的估计从而实现二维成像。这些方法基本假设是接收信号在观测期间是平稳和遍历的,但这一假设并非在所有情况下都成立,在恶劣环境下或者样本不足时可能很难满足这一要求。
文献[15]介绍了压缩感知(compressive sensing,CS)技术在成像中的应用。与BP类算法和谱估计方法相比,CS在雷达成像应用中的优势是不需要相干处理和统计假设就能获得高于瑞利极限的分辨率,这个优势在一些由于其他限制导致观测数据有限的场景中更加明显。在基本的CS模型下,可以将前视成像的任务表述为一个稀疏近似问题。其中,CS算法一般可以分为基于网格和无网格的两种算法。
文献[16-19]是基于网格的CS算法,计算效率更高,在实际系统中容易实现。比如正交匹配追踪(orthogonal matching pursuit,OMP)算法[17]通过对成像区域划分格点,获得成像区域的稀疏散射点表征。该算法主要由内积和投影步骤组成,计算复杂度低。然而,基于格点的OMP会存在格点失配问题。另一方面,在迭代过程中,一旦一个索引被选中并添加到支持集中,在随后的迭代中就无法将其删除。换句话说,OMP不能纠正过去迭代中出现的索引选择错误,产生不必要的伪影。因此,利用OMP获得的稀疏图像可能会受到伪影的影响且存在格点失配问题。
无网格的CS算法有原子范数的方法[20-22]和加权原子范数的方法[23],这是连续参数频率估计的方法,通过半正定规划来求解原子范数最小化问题。该算法能够利用部分样本估计谐波,即当观测信号只有完整观测样本中的随机子集时,该算法可以进行信号恢复并能够估计所有的频率分量。这类方法常用于解决谐波估计问题,但当使用宽带信号时,无法建模宽带信号中的交叉项,存在模型失配,因此无法得到精细的参数估计结果。
交替下降条件梯度(alternating descent conditional gradient,ADCG)是一种在连续参数空间解决估计问题的方法[24]。该方法利用可微分的观测模型,提出了全局条件梯度下降与非凸局部搜索交替进行的算法框架,既具有非凸优化算法的快速局部收敛性,又具有凸优化算法的稳定性和全局收敛性保证。在定位问题[25]和显微成像[26-27]应用广泛。该算法由于对参数集合进行精细估计的特性,不存在格点失配问题。
本文提出了基于ADCG的前视成像(ADCG forward-looking imaging,ADCG-FLA)算法,利用ADCG算法对参数集合进行精细估计的特性,所提算法获得了较好的参数估计结果。在每次迭代时,ADCG-FLA首先根据参数集合更新残差信号,然后利用稀疏恢复方法先获得散射点的粗估计,更新参数支持集,接下来通过梯度下降获得支持集中所有参数的精细估计。在参数精细估计时,通过线谱搜索步长,对原有ADCG算法进行加速。所提算法不仅适用于复杂信号模型,而且解决了二维参数估计格点失配问题,且避免了伪影的产生,重建出高分辨率雷达图像。另外,本文提出的算法可以有效地应用于由频率干扰等因素导致不完整观测的复杂场景中。通过仿真实验,与现有方法相比,ADCG-FLA算法显著提高了雷达图像质量。
1 信号模型
考虑前视成像雷达工作时的观测几何模型如图1所示。雷达装配一个发射天线和N个均匀线性阵列组成的接收天线,两个相邻阵元的间隔为d=λ/2,λ表示雷达发射信号的波长。将天线阵列的相位中心定义为O,以相位中心为原点,建立笛卡尔坐标系(X,Y)。对于前视成像场景,假设成像区域包含K个散射点,其中第k个散射点的距离和方位相对于相位中心表示为(Rk,θk)。在前视成像中,散射点分布在视线OY附近,散射点与雷达没有切向的运动,无法合成大孔径进行成像,在没有额外信息的情况下区分方位相近的散射点是较困难的。
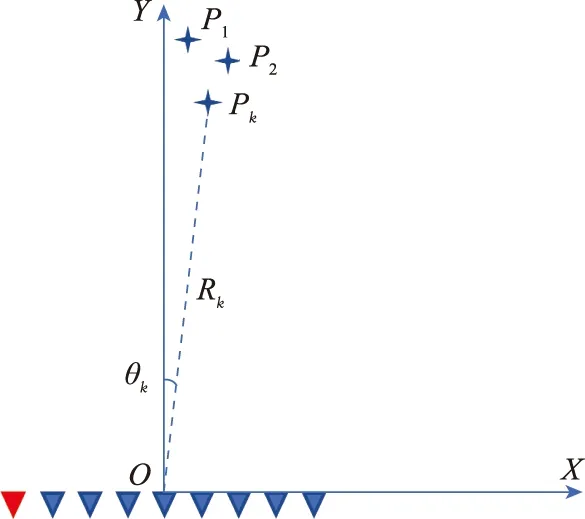
图1 前视成像雷达平台几何模型Fig.1 Geometry model of forward-looking imaging radar platform
为了获得前视成像区域的高精度二维图像,本文采用宽带发射信号,提高距离分辨力,从而对角度信息进行精确的估计。在精确制导等应用场景中,希望在较短的时间内进行前视成像。正交频分复用(orthogonal frequency division multiplexing,OFDM)是多载波传输的一种技术,使用大量的正交子载波实现合成带宽的效果。因此,本研究考虑利用单个脉冲进行前视成像。考虑发射单个脉冲OFDM信号,包含M个子载波,则第m(m∈M)个信号的载频表示为fm=f0+(m-1)Δf,其中f0为起始载频,Δf为步进间隔。脉冲信号通过发射天线辐射到前视成像区域,经过散射点辐射后被阵列天线接收,由此获得多个散射点场景下各阵元的观测信号。由于发射一个脉冲信号持续时间较短,雷达和散射点近似相对静止,多普勒的影响近似忽略,下面简单推导信号模型,发射信号表示为
(1)
式中:I表示矩形信号,Tcp表示循环前缀长度,Tc=1/Δf表示脉冲宽度,Tcp≤Tc。以一个接收天线为例,接收信号可以表示为
(2)
将接收信号进行解调后表示为
(3)

然后将采样信号做傅里叶变换,得到各个子载波信号表示为
s(m)=e-j2π(f0+(m-1)Δf)τ,m=1,2,…,M
(4)
在远场假设下,发射信号辐射到散射点k并被第n个天线接收的总延时定义为
(5)
因此,根据式(4),则第n个接收天线第m个载波的回波信号y(n,m)表示为
(6)

(7)
将参考信号a(n,m)向量化后表示为a(Rk,θk)∈CMN,可以获得式(6)的向量形式:
(8)


(9)
在前视成像场景中,当接收信号存在交叉项且不完整观测时,实现高精度的二维参数估计是困难的。
2 交替下降条件梯度算法
本文利用提出的算法解决问题式(9),获得各散射点参数的估计,实现二维高分辨成像。下面分4个部分讲述提出的算法。第2.1节讲述算法的主要框架,第2.2节详细讲述散射点参数粗估计部分,第2.3节详细讲述散射点参数精细估计部分,第2.4节简单介绍散射点个数的估计方法,并给出了算法的流程图。
2.1 ADCG-FLA框架
ADCG是一种全局条件梯度下降与非凸局部搜索交替进行的算法框架。为了解决CS算法格点失配和伪影较多的问题,本文提出了适用于前视成像场景的ADCG-FLA算法,能够提高二维成像性能。所提算法每一次迭代时,仅增加一个散射点的粗估计结果到参数集合,然后利用梯度下降对参数集合中所有散射点的参数进行精细估计。为了加速收敛,在利用梯度下降进行所有参数的精细估计时,每次只更新参数中梯度绝对值最大的参数。在进行下一次迭代时,先从观测信号中移除已经完成精细估计的散射点的信号,获得残差信号,然后进行下一个散射点的粗估计。

2.2 各散射点参数粗估计

(10)

现在,将成像区域的距离维度和角度维度划分成U×V个格点,对位于格点{Ru,θv}的散射点,第n个天线第m个载波的参考信号可以表示为
(11)

(12)
式中:x是稀疏的。则第k个散射点的粗估计值为
(13)
(14)

(15)

对于经典的ADCG方法,通过选择与残差信号梯度最具相关性的导引向量来确定散射点的粗估计。而前视成像场景中,回波信号为各个散射点回波信号的和,在前k-1个散射点精细估计后,可以直接用CS的方法选择与残差信号最具相关性的导引向量确定散射点的距离角度粗估计,散射点的幅度可通过最小二乘获得。
在获得第k个散射点的粗估计以后,本文通过梯度下降的方法重新对前k个散射点的参数进行精细估计,这样处理的目的是希望达到局部搜索的最优性能。
2.3 各散射点参数精细估计
根据粗估计参数集合定义损失函数:
(16)

(17)
(18)
(19)

为加速参数的精细估计步骤,本研究每次只对4k个参数中偏导数绝对值最大的参数进行精细估计,即:
(20)

(21)
重复式(16)~式(21),直到损失函数收敛或达到迭代最大步数。至此,得到前k个散射点的精细估计。
2.4 散射点个数估计
在前面提出算法中,本研究假设散射点个数为K,但通常对于非合作目标,这一信息很难预先获取,因此需要估计目标的散射点个数K。
由于估计散射点个数并非本研究重点,本文采用较为常用的MDL准则解决散射点个数的估计问题,根据MDL准则,可通过优化准则得到散射点个数K的估计:
(22)

步骤 1假设散射点个数K=1。
步骤 2根据所提算法估计散射点的幅度、距离和角度。
步骤 3计算MDL(K)。
步骤 4假设K=K+1,返回步骤2。
重复类似步骤,直到MDL(K)达到最小值。
最后,本研究将提出的ADCG-FLA算法流程如算法1所示。相比于传统的ADCG算法,本文针对前视成像场景的特殊性在散射点粗估计部分和梯度下降策略部分分别做了修正,粗估计部分利用基于格点的CS算法获得散射点的距离角度粗估计值,并利用最小二乘获得散射点复幅度的粗估计值,精细估计中梯度下降策略部分每次只对一个参数进行精细估计,提高了梯度下降的收敛速度。

3 仿真实验
本节给出了所提算法的成像质量和距离角度参数估计的性能。与现有的OMP、二维原子范数算法[20]对比,展示了所提算法的优势。
为了说明在不同场景下的成像性能,本文根据表1所给出的雷达系统参数和表2~表4所给出的散射点参数分别仿真雷达回波。3种仿真场景分别记为场景1、场景2和场景3。场景1表示所有散射点在距离维度是可分辨的,然后利用所提算法评估成像性能。场景2表示在一个距离分辨单元有多个散射点,即散射点在角度维度是可分辨的,通过在这两种场景下的成像性能说明算法的有效性。当同一距离分辨单元在相同角度分辨单元有多个散射点时,多个散射点是无法分辨的,可以通过本研究方法在一定条件下提高成像性能。场景3表示其中两个散射点在距离和角度维度都分辨不开,视为一个散射点进行成像。
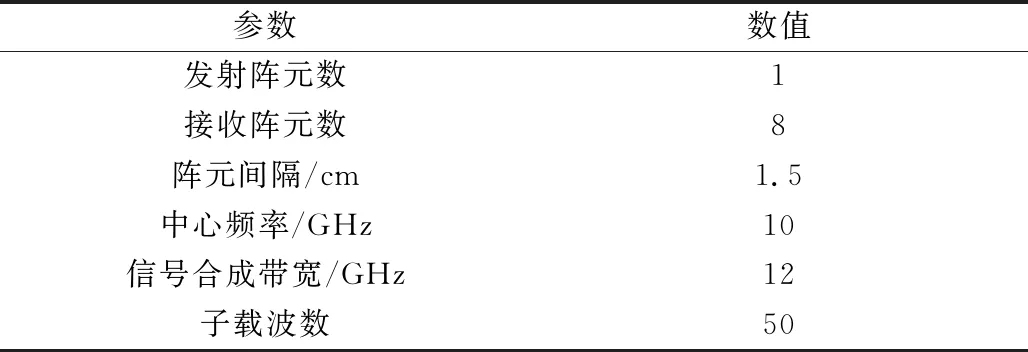
表1 雷达系统参数Table 1 Parameters of radar system

表2 散射点参数(场景1)Table 2 Parameters of scatterers (scene 1)

表3 散射点参数(场景2)Table 3 Parameters of scatterers (scene 2)

表4 散射点参数(场景3)Table 4 Parameters of scatterers (scene 3)
3.1 完整观测场景
根据表1和表2的参数产生雷达回波。数据完整观测场景下,生成包含4个散射点的回波数据,其中信噪比(signal to noise ratio,SNR)设置为10 dB。在不同散射点个数假设下,获得MDL值如表5所示,通过MDL最小值判决准则,散射点个数为4,即K=4。实验中选取对比的两种方法为OMP算法和二维原子范数算法。利用提出的ADCG-FLA算法和两种对比算法分别对回波信号进行成像处理,获得了在3种不同算法下的成像结果。对比这3种方法在不同SNR条件下距离和角度估计的均方根误差,并获得了与Cramer-Rao下限(Cramer-Rao lower bound,CRLB)[31]的对比结果。其中OMP算法是基于格点的CS算法,仿真时将感兴趣的距离和角度区域分别划分为Rmin∶ΔR∶Rmax=0.6 m∶0.02 m∶2 m,θmin∶Δθ∶θmax=1°∶0.1°∶12°,感兴趣区域范围较小,提高OMP运算速度。

表5 MDL准则结果Table 5 MDL criterion results
图2展示了不同算法的成像性能。OMP和二维原子范数算法恢复出的散射点位置离真值位置较远,所提算法恢复出的散射点位置离真值位置较近,说明了所提算法具有较好的成像性能。由于OMP算法是基于网格的CS算法,存在格点失配问题,甚至会恢复出伪影,二维原子范数算法直接进行参数估计,但是由于没有考虑距离角度的交叉项,存在模型失配问题。所提ADCG-FLA算法根据接收信号的实际形式建模,不仅解决了CS算法中存在的格点失配问题,也减少了因旁瓣过高产生的伪影,实现了二维的高分辨成像。
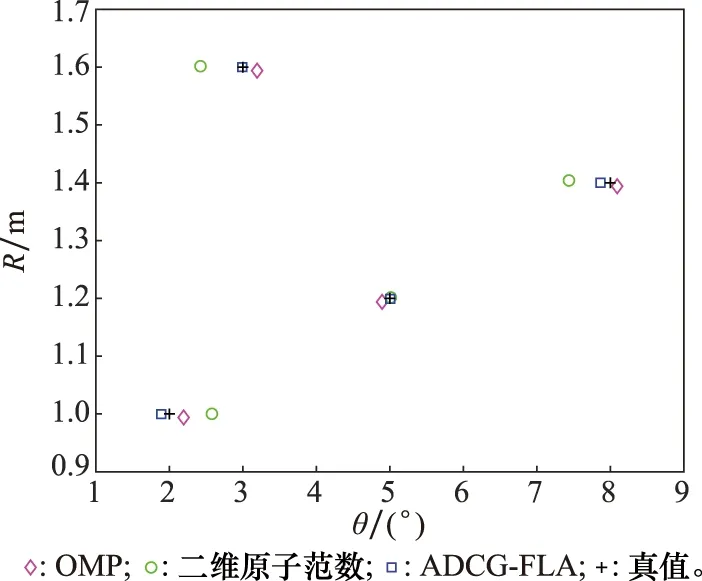
图2 完整观测成像结果(场景1)Fig.2 Imaging results in complete observation (scene 1)
图3和图4分别给出了3种方法情况下距离估计和角度估计的性能。其中,所提算法的估计结果与CRLB趋于一致,而现有的OMP和二维原子范数算法均方根误差(root mean squared error,RMSE)与CRLB曲线距离较远,说明了所提算法具有较好的估计性能。这主要是因为OMP存在格点失配问题,随着SNR的增加,估计性能趋于平稳,SNR较低时,由于划分的感兴趣范围较小,导致OMP的结果较好。二维原子范数算法进行数据恢复和参数估计时忽略了交叉项的影响,存在模型失配问题,不能达到参数估计的性能界,提出的ADCG-FLA算法不仅考虑了交叉项的问题,而且对格点化的粗估计结果进行精细估计,解决了模型失配和格点失配的问题,获得了连续参数的估计结果,均方误差基本达到了CRLB,优于其他两种对比算法。

图3 完整观测距离估计RMSE(场景1)Fig.3 RMSE of range estimation in complete observation (scene 1)

图4 完整观测角度估计RMSE(场景1)Fig.4 RMSE of angle estimation in complete observation (scene 1)
同理,根据表1和表3的参数产生雷达回波,并进行成像处理,得到如图5~图7所示的结果。图5展示了不同算法在SNR=10 dB的成像性能。图6和图7分别给出了3种方法距离估计和角度估计的性能。说明从场景2回波数据中可以得到和场景1相似的成像结果和估计性能结果。

图5 完整观测成像结果(场景2)Fig.5 Imaging results in complete observation (scene 2)

图6 完整观测距离估计RMSE(场景2)Fig.6 RMSE of range estimation in complete observation (scene 2)
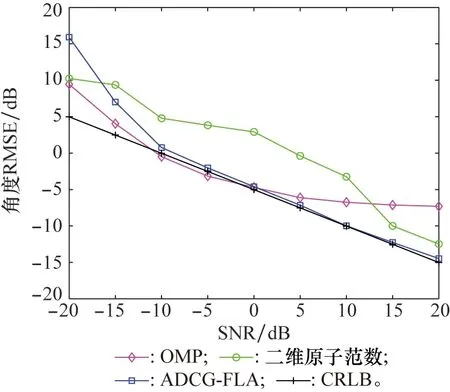
图7 完整观测角度估计RMSE(场景2)Fig.7 RMSE of angle estimation in complete observation (scene 2)
同理,根据表1和表4的参数产生雷达回波,并进行成像处理,得到结果如图8所示,图8展示了不同算法在SNR=10 dB的成像性能。当在相同距离分辨单元和相同方位分辨单元有两个散射点时,提出算法得到的成像结果距离散射点真值更近,提高了成像性能。

图8 完整观测成像结果(场景3)Fig.8 Imaging results in complete observation (scene 3)
3.2 非完整观测场景
根据表1和表2的参数产生雷达回波,数据非完整观测场景下,生成包含4个散射点的回波数据,其中数据缺失率为50%,即接收信号随机缺失一半接收信号,SNR=10 dB。实验中选取对比的两种方法为OMP算法和二维原子范数算法。首先,利用提出的ADCG-FLA算法和对比的两种算法分别对回波信号进行成像处理,获得了在3种不同算法下的成像结果。然后,对比这3种方法在不同SNR条件下距离和角度估计的RMSE,并给出了与CRLB的对比结果。其中,OMP算法是基于格点的CS算法,仿真时将感兴趣的距离和角度区域分别划分为Rmin∶ΔR∶Rmax=0.6 m∶0.02 m∶2 m,θmin∶Δθ∶θmax=1°∶0.1°∶12°,感兴趣区域范围较小,提高OMP运算速度。
图9展示了不同算法的成像性能。OMP和二维原子范数算法恢复出的散射点位置离真值位置较远,所提算法恢复出的散射点位置离真值位置较近,说明了所提算法具有较好的成像性能。OMP算法存在格点失配问题,二维原子范数算法在数据缺失场景下先进行数据恢复再进行参数估计,但是由于没有考虑距离角度的交叉项,存在模型失配问题。提出的ADCG-FLA算法根据接收信号的实际形式建模,不仅解决了CS算法中存在的格点失配问题,也减少了因旁瓣过高产生的伪影,实现了二维的高分辨成像。

图9 非完整观测成像结果(场景1)Fig.9 Imaging results in incomplete observation (scene 1)
图10和图11分别给出了3种算法情况下距离估计和角度估计的性能。其中,所提算法的估计结果与CRLB趋于一致,而现有的OMP和二维原子范数算法RMSE随着SNR的增加,估计性能趋于平稳,与CRLB曲线距离较远,说明了所提算法具有较好的估计性能。这主要是因为OMP存在格点失配问题,随着SNR的增加,估计性能趋于平稳,SNR较低时,由于划分的感兴趣范围较小,导致OMP的结果较好。二维原子范数算法进行数据恢复和参数估计时忽略了交叉项的影响,存在模型失配问题,不能达到参数估计的性能界。提出的ADCG-FLA算法不仅考虑了交叉项的问题,而且对格点化的粗估计结果进行精细估计,解决了模型失配和格点失配的问题,获得了连续参数的估计结果,RMSE基本达到了CRLB,优于其他两种对比算法。
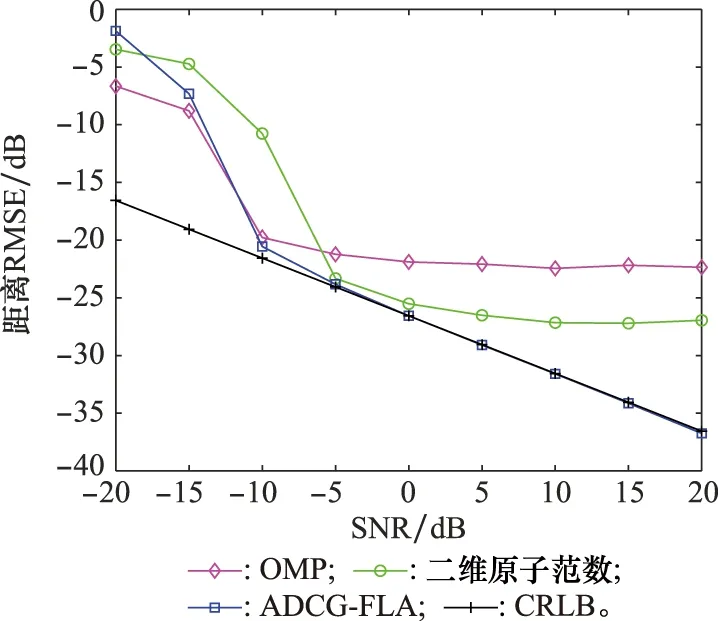
图10 非完整观测距离估计RMSE(场景1)Fig.10 RMSE of range estimation in incomplete observation (scene 1)

图11 非完整观测角度估计RMSE(场景1)Fig.11 RMSE of angle estimation in incomplete observation (scene 1)
同理,根据表1和表3的参数产生雷达回波,数据缺失率为50%,进行成像处理,得到结果如图12~图14所示,图12展示了不同算法在SNR=10 dB的成像性能。图13和图14分别给出了3种方法距离估计和角度估计的性能。说明从场景2回波数据中可以得到和场景1相似的成像结果和估计性能结果。
同理,根据表1和表4的参数产生雷达回波,数据缺失率为50%,进行成像处理,得到结果如图15所示,图15展示了不同算法在SNR=10 dB的成像性能。当在相同距离分辨单元和相同方位分辨单元有两个散射点时,提出算法得到的成像结果距离真值更近,提高了成像性能。

图12 非完整观测成像结果(场景2)Fig.12 Imaging results in incomplete observation (scene 2)

图13 非完整观测距离估计RMSE(场景2)Fig.13 RMSE of range estimation in incomplete observation (scene 2)

图14 非完整观测角度估计RMSE(场景2)Fig.14 RMSE of angle estimation in incomplete observation (scene 2)
通过在完整观测场景和非完整观测场景条件下的实验仿真,验证了所提算法在前视成像应用中的优越性和有效性。

图15 非完整观测成像结果(场景3)Fig.15 Imaging results in incomplete observation (scene 3)
4 结 论
本文研究了宽带雷达的前视成像问题,提出了ADCG-FLA算法。所提算法不仅解决了格点失配问题,而且适用于存在交叉项等复杂模型和数据缺失等复杂场景中,实现了基于连续参数的高分辨二维前视成像。仿真结果验证了本文提出的ADCG-FLA算法的成像性能优于其他已有的方法,参数估计精度基本接近于CRLB,可为后续的宽带前视成像雷达系统提供参考。