基于互联网的上肢康复机器人
2021-08-23吴炳坚
□ 吴炳坚
上海电气集团股份有限公司 中央研究院 上海 200070
1 研发背景
上肢运动功能障碍是脑卒中、创伤性脑损伤、脊髓损伤、多发性硬化症的常见后遗症,严重影响患者的日常生活能力。以神经可塑性原理为基础的机器人上肢运动功能训练,能够优化患者大脑运动功能神经的重塑,恢复大脑对上肢运动的有效控制,从而提高患者的日常生活能力[1]。
目前主流上肢康复机器人主要有美国麻省理工学院开发的MIT-MANUS上肢康复机器人、意大利帕多瓦大学研制的Sophia系列上肢康复机器人、瑞士苏黎世联邦理工学院研制的 ARMin系列上肢康复机器人等[2-5]。这些上肢康复机器人只进行上肢关节粗大运动训练,体积比较大,而且昂贵,仅限在医院内使用,无法满足复杂的康复训练要求。
笔者研发的上肢康复机器人,提供上肢关节粗大运动与手部精细运动相结合的训练方案。平台与计算机之间使用蓝牙无线信号传输,采用分体式结构设计,便于不同场景使用和携带,是目前市场上最为精致小巧的上肢康复机器人。
患者可以在诊所或家中进行远程康复治疗,解决多次往返医院的不便,创建了上肢功能障碍整体解决方案进入社区、家庭的新模式。
2 系统架构
上肢康复机器人分为两部分——软件平台和移动平台,两者之间进行蓝牙无线通信。
软件平台部署在互联网服务器上,采用浏览器/服务器模式,对计算机配置要求较低,不用安装任何专业软件,只要有一个浏览器就可以实现,维护方便。
软件平台设有治疗师和患者两大端口,通过浏览器页面访问。治疗师端可以制订方案与管理,患者端有可视化训练过程和结果。
上肢康复机器人系统架构如图1所示。
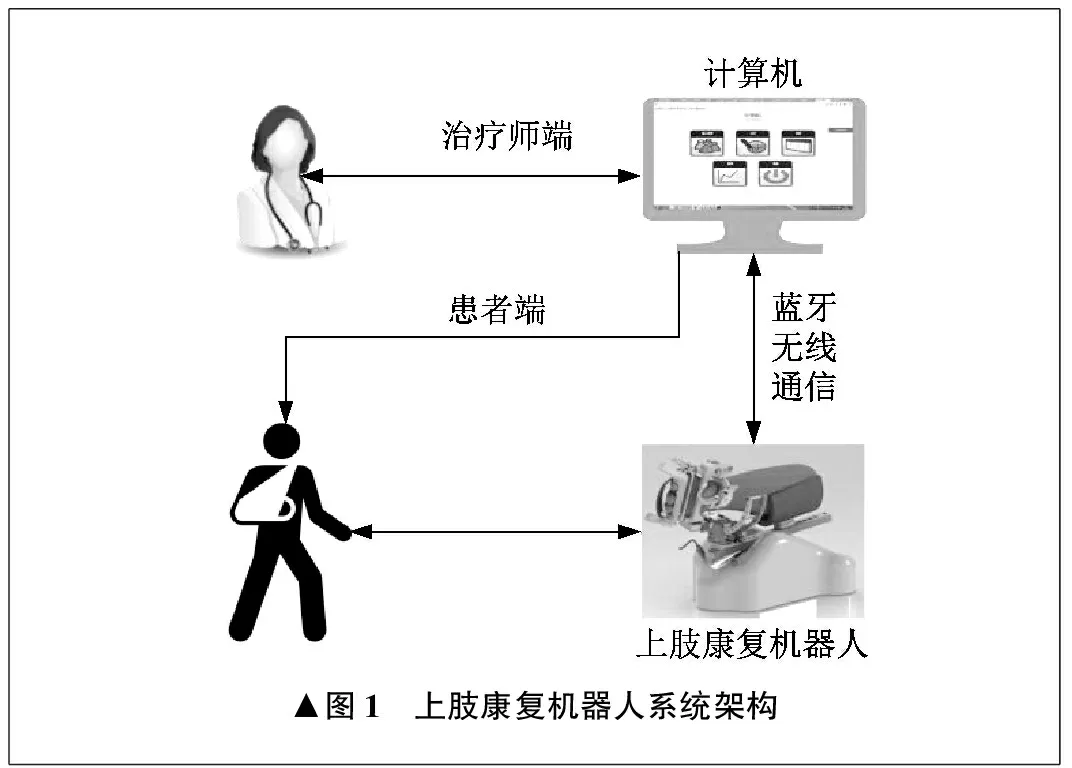
▲图1 上肢康复机器人系统架构
上肢康复机器人在桌面上跟随患者前臂移动,底座中心安装摄像头,使用二维码图像识别技术可精确识别当前的运行轨迹与趋势,同时测量所有手臂的动作参数,通过蓝牙无线通信反馈给软件平台。
3 移动平台
上肢康复机器人移动平台采用三轮全向运动机构形式,径向对称安装,各轮互成120°。上肢康复机器人通过静态矫形器固定在手臂上,夹杆上的紧固机构根据不同手臂长度可以调整位置,在左右臂矫形器之间可以进行更换。
上肢康复机器人移动平台如图2所示。
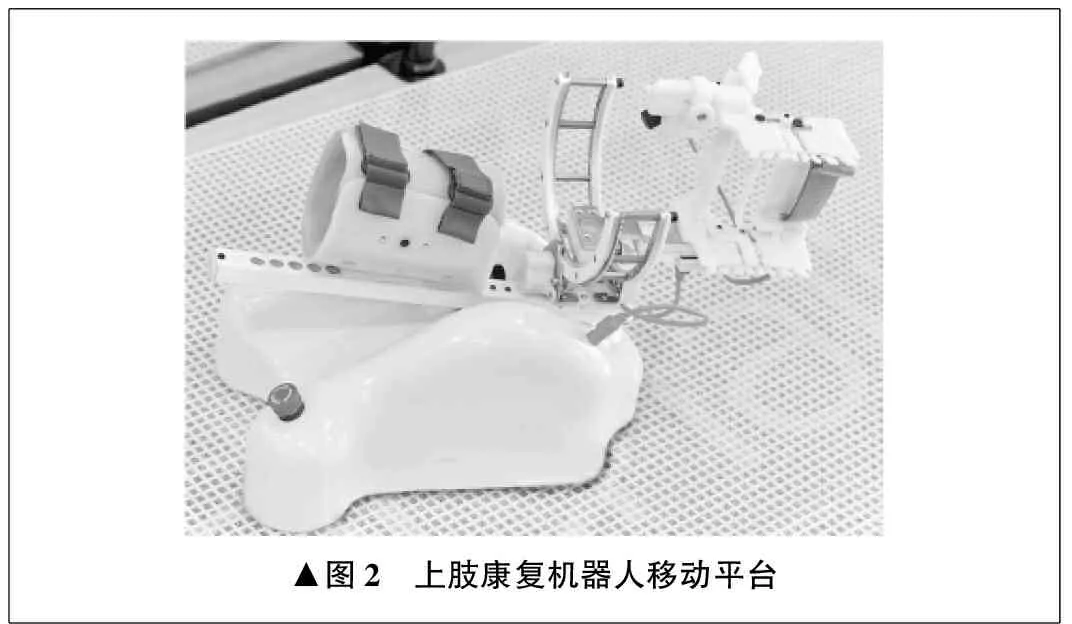
▲图2 上肢康复机器人移动平台
4 运动模型
建立如图3所示的世界坐标系XOY和机器人坐标系X′O′Y′,θ为机器人坐标系与世界坐标系之间的夹角。
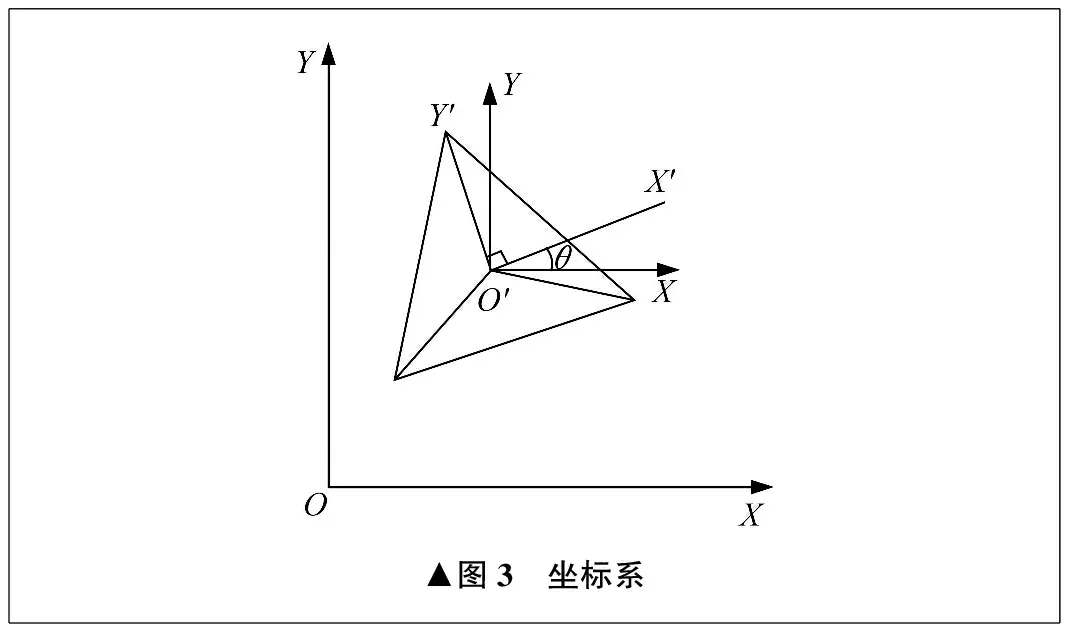
▲图3 坐标系
设在世界坐标系下上肢康复机器人的线速度为Vx、Vy,角速度为ω,机器人坐标系下上肢康复机器人的线速度为V′x、V′y,角速度为ω′,将世界坐标系的运动映射为沿机器人坐标系的运动,可得:
(1)
采用正交旋转矩阵表示,可推出坐标系关系矩阵方程式为:
(2)
驱动轮间的夹角为120°,设三个驱动轮的速度为V1、V2、V3,R为上肢康复机器人中心到轮中心的水平距离,如图4所示,建立正向运动学方程为[6-7]:

▲图4 参数示意图
(3)
由式(3)可以推出上肢康复机器人的运动矩阵方程式为:
(4)
由式(2)、式(4)可得上肢康复机器人在世界坐标系中的运动方程。
5 硬件设计
上肢康复机器人硬件系统如图5所示。底座力传感器为左右布局的两个单自由度传感器,集成在结构框架和正交夹紧杆之间,既可以测量竖直方向上的用户交互力,又可以应用算法来判断患者左右运动的意图。电位计用于测量手腕旋转角度。
自制电路板1为四层电路板,蓝牙无线通信模块和ARM处理器集成在该电路板上。其中,ARM处理器是基于ARM Cortex-A9的高速处理器,用于上肢康复机器人核心算法控制及其它电路模块的交互。
自制电路板2为基于STM32芯片最小系统的两层电路板,用于采集手臂动作参数,实时读取安装在各手指位置的薄膜压力传感器的值和用于测量手腕旋转角度的电位计电压值。
患者可以选择上肢康复机器人的运动模式,包括被动、主动、辅助等。
(1) 被动模式。电机处于自由拖拽状态,上肢康复机器人底座中心安装的摄像头可实时拍摄康复训练桌上的位置二维码图片,发送给ARM处理器。ARM处理器采用图像算法,计算出当前位姿信息,并通过蓝牙无线通信将当前上肢康复机器人的位姿信息、手臂动作参数等数据打包上传给计算机人机系统,并映射到训练与评估系统的小游戏中。
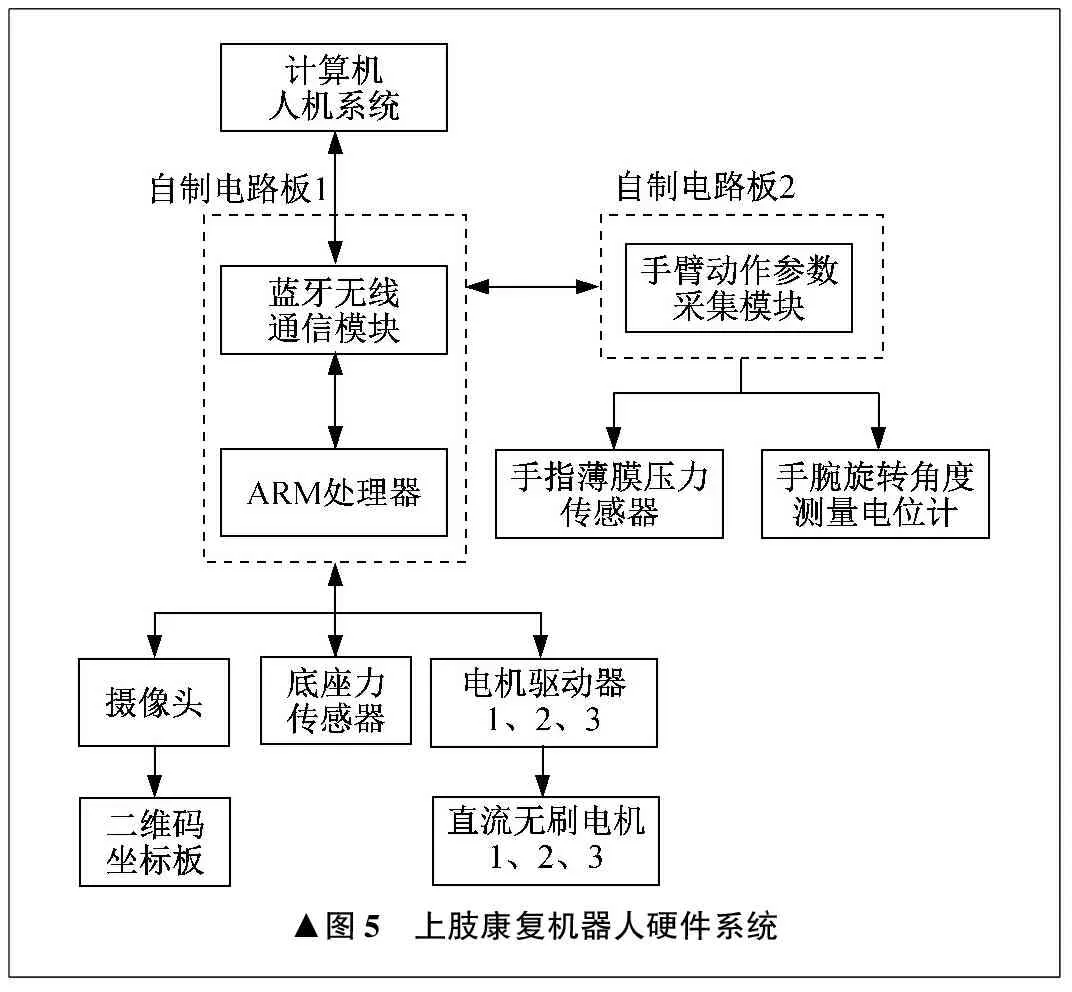
▲图5 上肢康复机器人硬件系统
(2) 主动模式。上肢康复机器人获取位姿信息和手臂动作参数的机制与被动模式相同。患者选择主动模式后,上肢康复机器人通过评估游戏精确计算出患者的上肢可活动空间、力反馈等数据,经处理配置给训练游戏系统。患者进入某一特定游戏后,蓝牙无线通信将上肢康复机器人所需运动的方向、速度等信息下发给ARM处理器核心处理芯片。ARM处理器核心处理芯片对上肢康复机器人进行运动学逆向分解,解析出三个驱动轮电机的速度、加速度、时间等,并通过控制器局域网通信总线发送给电机驱动器。电机驱动器通过比例积分微分方式控制电机,并通过电机编码器将电机参数实时反馈给电机驱动器。
(3) 辅助模式。在主动模式下通过底座力传感器判断患者左右运动意图,由算法控制上肢康复机器人左右偏移。
6 软件平台
6.1 架构
上肢康复机器人软件平台采用JAVA编程语言开发,使用服务器部署互联网,在浏览器中输入服务器网际协议地址可进入软件界面。
软件平台架构如图6所示,分为三部分——用户系统、数据库、游戏系统。用户系统与数据库、游戏系统之间分别采用可扩展标记语言和JAVA语言网络加载协议进行通信,游戏系统与数据库之间通过可扩展标记语言进行数据传输。
6.2 用户系统
用户系统有治疗师和患者两大端口。

▲图6 软件平台架构
(1) 治疗师端。治疗师端有上肢康复机器人软件平台的最高权限,界面如图7所示。病人管理模块支持患者数据库管理,用于添加或修改患者身份信息、患肢信息、病历卡号等。治疗模块在患者经过评估游戏后能够得出患者现阶段的各项指标,治疗师为患者分配训练游戏的等级、时长、周期。日历模块用于记录患者所有应用上肢康复机器人的训练记录。结果模块可一键生成训练评估报告,提供患者评估游戏数据、训练游戏、患者信息等文档,供治疗师查阅。
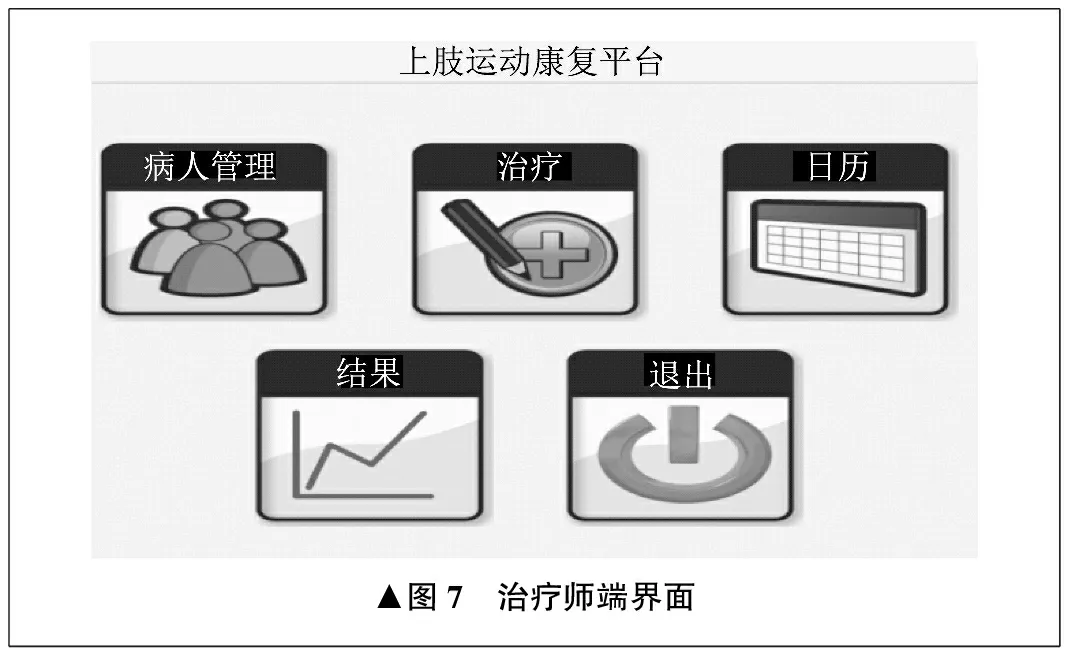
▲图7 治疗师端界面
(2) 患者端。患者使用治疗师分配的用户名和密码登录系统后,出现治疗师训练方案中设置的评估和训练游戏,以及相应的难度、周期。患者端界面如图8所示。
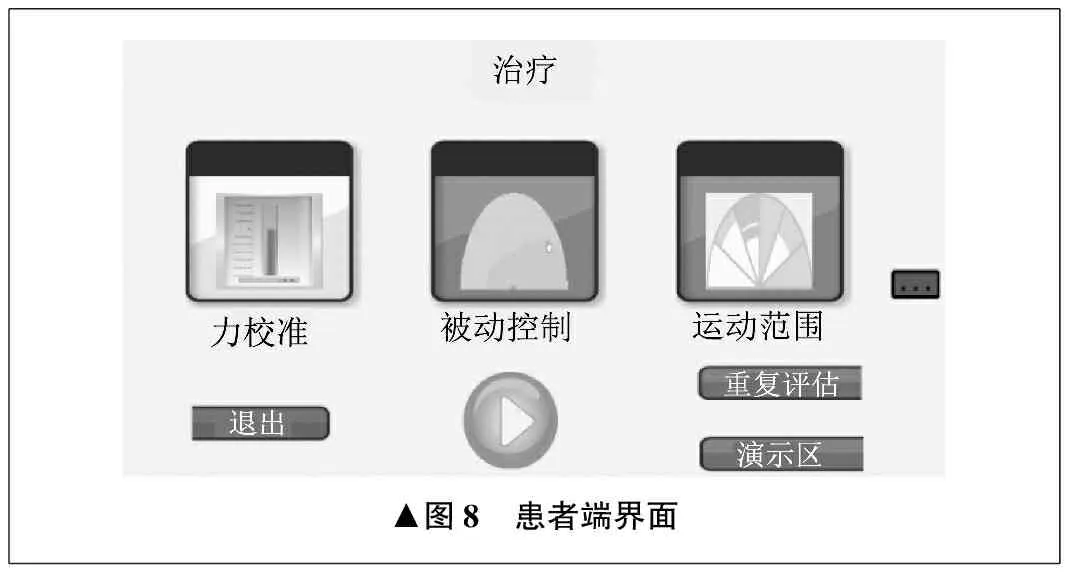
▲图8 患者端界面
6.3 评估和训练游戏
(1) 评估游戏。笔者根据国际功能分类[8-10]设计了八个评估游戏,分别为力校准、被动控制、运动范围、用力范围、运动控制、力量控制、手掌与手腕评估、日常生活活动能力评估,如图9所示。
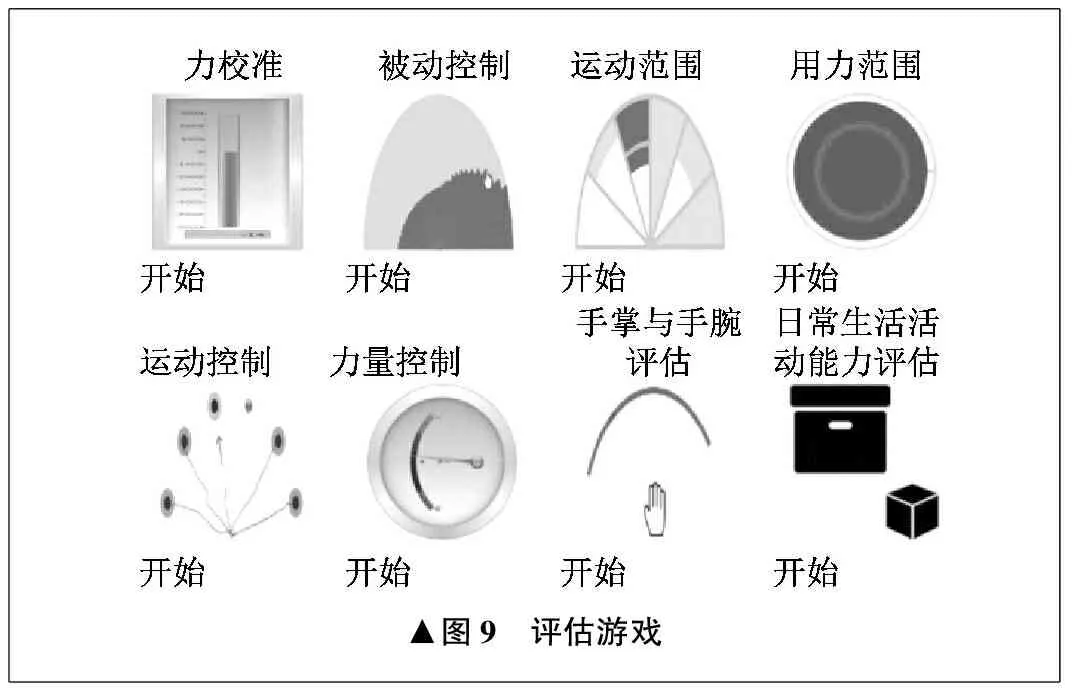
▲图9 评估游戏
每个评估游戏是一项1~2 min的短任务,目的是为治疗师提供手臂运动参数的客观评估,并相应调整训练游戏参数。
(2) 训练游戏。训练游戏包括探索发现、指定动作、购物车、拖放图形、记忆配对、拼图、拼写、纸牌,如图10所示。
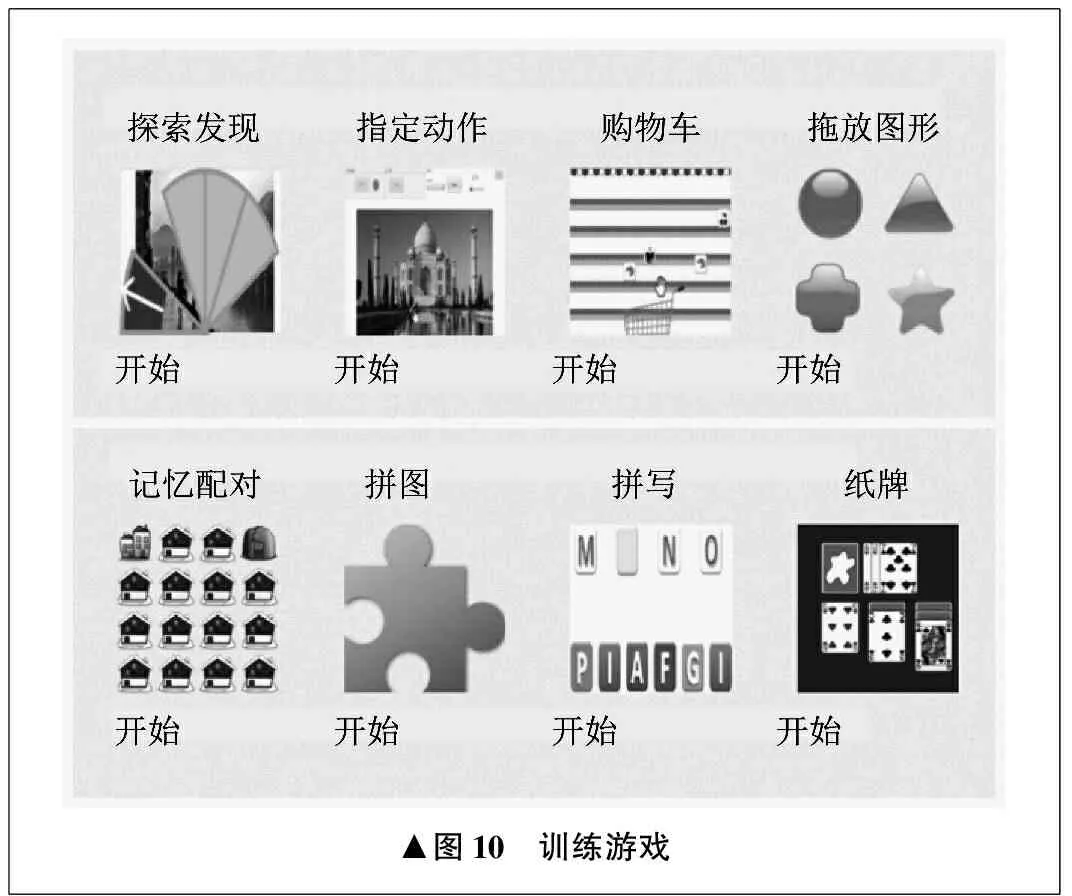
▲图10 训练游戏
这些训练游戏与日常生活相关,可在康复训练过程中有效提高患者康复的信心,加快康复进度,促使患者更快恢复上肢功能。
7 试验
7.1 多用户远程访问试验
部署服务器后,设置互联网域名,可以实现多用户访问。多用户登录效果如图11所示。
治疗师使用浏览器远程登录软件平台,可以对患者进行多用户管理。患者多用户可以使用浏览器登录软件平台,进行康复治疗。
▲图11 多用户登录效果
7.2 游戏功能验证
通过试验,上肢康复机器人训练游戏的位置、速度、范围会被评估系统测量出,得到参数限制。
运动范围试验结果如图12所示,用于评估患者手臂应用上肢康复机器人后的最大活动范围。左上点位置是上肢康复机器人初始位置,评估系统记录上肢康复机器人在二维码坐标康复桌面180°活动中的轨迹。试验轨迹分为八次往复运动,经测量,系统记录的轨迹与实际相符,符合康复设计要求。
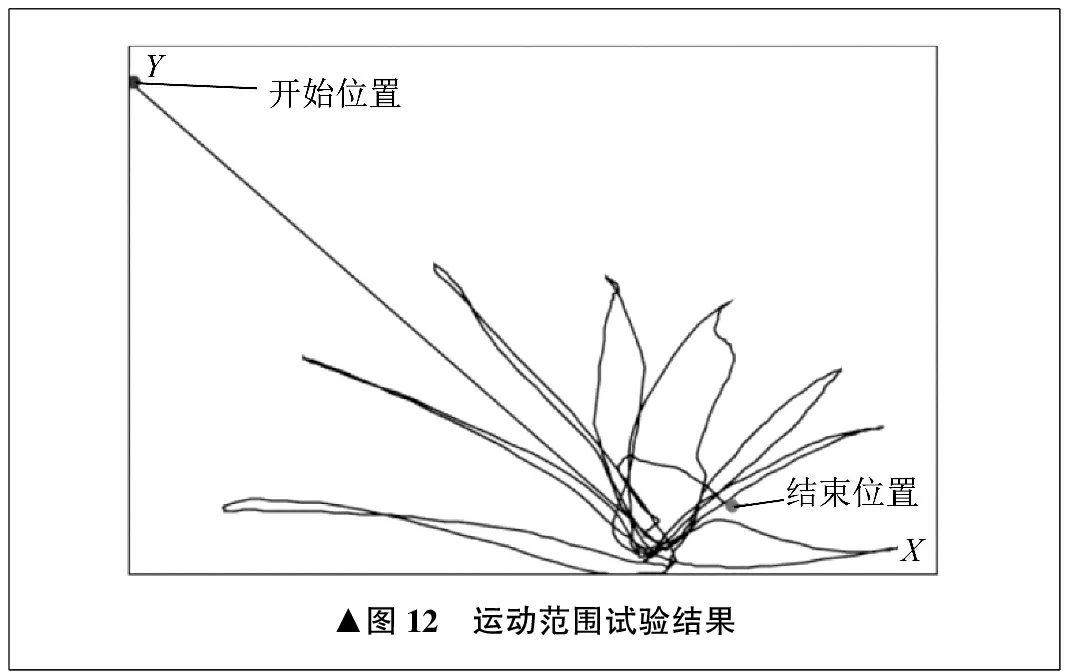
▲图12 运动范围试验结果
力量控制评估试验用于治疗师采集患者手臂的平衡力,评估患者1 min内保持手臂在一定角度范围内的能力。
上肢康复机器人底座力传感器记录实时受力情况,如图13所示,软件平台由此计算出阈值范围内的力平衡时间。
用力范围试验用于评估患者五个手指的握力情况。采用两个手指薄膜压力传感器,大拇指压力使用一个薄膜压力传感器,其余四个手指压力合用一个薄膜压力传感器。系统通过手掌展开或握紧判断两个手指薄膜压力传感器受力的合值,小于20%为手掌处于松开状态,20%~60%为初步握紧状态,60%~80%为握紧状态,大于80%为完全握紧状态。
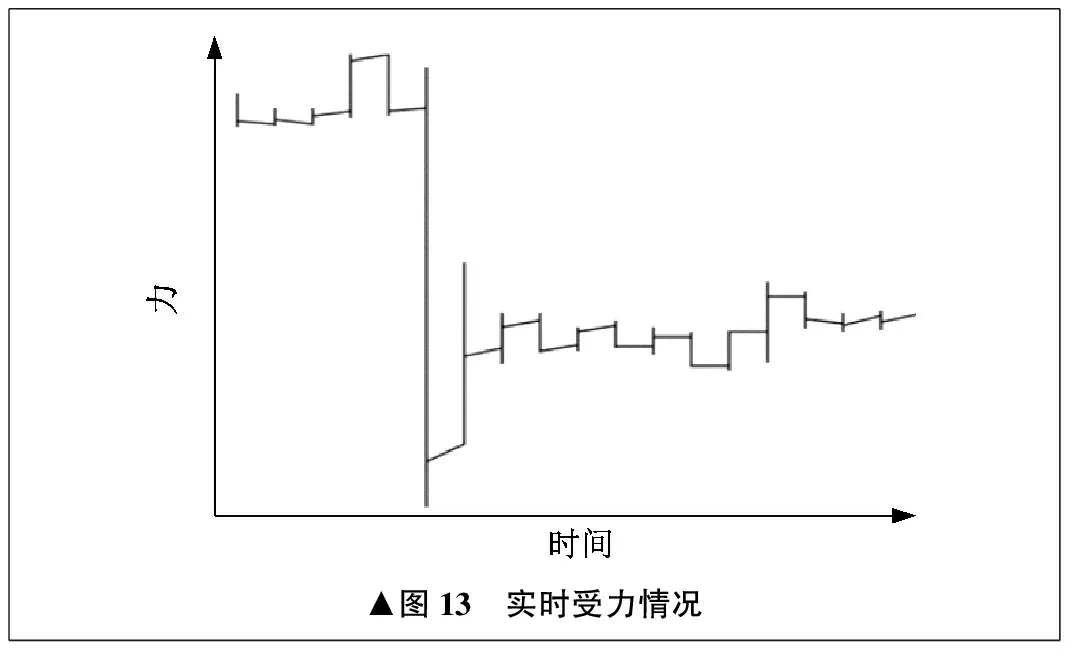
▲图13 实时受力情况
8 结束语
笔者研发了基于互联网的上肢康复机器人,体积小巧、成本低廉,为患者提供量化的多运动模式、多场景应用、多关节运动训练功能,可以实时提供数据信息反馈,覆盖上肢康复全周期训练,同时创立了上肢功能障碍整体解决方案中机器人疗法进入社区、家庭的新模式。