一种车载平台自动调平方法与控制技术研究
2021-08-23潘运平刘世永
戴 壮,肖 峻,潘运平,刘世永,邓 兴
(1.武汉理工大学 机电工程学院,湖北 武汉 430070;2.航天南湖电子信息技术股份有限公司,湖北 荆州 434000)
现代雷达战争中,减少雷达车进入战地后平台架设并调整至水平时间成为战前的突出问题。利用自动调平系统能将车载平台自动、快速且高精度地调整至工作状态,从而大大提高雷达设备的机动性和反应能力[1]。国内的学者对调平策略已有一定的研究[2-4],针对4点调平,现有策略主要有基于角度误差调平和基于位置误差调平两种。前者的缺点是需要根据倾角值反复地调整,支腿动作易产生震荡、精度不高;后者为避免支腿下降时液压系统响应的滞后,采用追逐最高点调平法,该调平法的缺点是为了满足调平时间的要求,会同时操作多个支腿,降低平台的稳定性。针对上述问题,以及平台自身载重过大会导致平台产生一定的形变,从而影响调平精度的问题,笔者提出了4点3轴角度误差控制和追逐最高点逐点调平相结合的调平策略,调平时使用3个倾角传感器分别测量平台前横Y轴方向、后横Y轴方向以及水平X轴方向的倾角,并将调平过程分为两个阶段。第一阶段使用角度误差调平法,快速地将平台调整到与目标精度相差较小的角度范围内。第二阶段使用追逐最高点的逐点调平法,根据3个倾角值对支腿进行单独操作。该调平策略能满足调平时间的要求,并能有效解决重载平台形变引起的精度误差。
为了实现上述提出的调平策略,笔者设计了基于液压驱动的调平控制系统。调平控制算法采用加入模糊控制的PID算法[5-6],并利用Simulink软件建立仿真模型,通过支腿位移的仿真曲线验证调平策略和模糊PID控制器的有效性,从而在保证调平系统稳定性的基础上提高调平的精度,减少调平时间。
1 车载平台的建模与分析
对于重载、跨度大的车载平台,保证平台的稳定性是调平的关键和前提。通过建立平台在非水平状态下的静态模型,得到平台倾角与支腿位移的数学关系式,作为调平策略具体过程实现的理论依据。
1.1 平台在非水平状态下的静态模型
车载平台的调平实质是平台沿X轴、Y轴两个方向的调平,理想状态下平台简化模型如图1所示。

图1 平台的简化模型

(1)
1.2 平台倾角与支撑腿伸长量的关系
当平台倾角α、β很小时可作如下处理:
cosα=cosβ=1sinα=αsinβ=βsinα·sinβ=0
(2)
将式(2)代入式(1),得到支腿在OX0Y0Z0中的坐标为:
(3)
设平台初始倾角为α0、β0,则各作用点在OX0Y0Z0坐标系中Z轴方向的坐标为:
(4)
假定支腿3的作用点为最高点,则此时α0>0、β0>0,由式(4)可知其它3条支腿与最高点支腿的距离差为:
(5)
从而可得其它支腿所需调节距离为:
e1=α0La+β0Lbe2=β0Lbe4=α0La
(6)
式中:La为支腿3与支腿4之间的距离;Lb为支腿3与支腿2之间的距离。
2 调平策略
2.1 调平策略分析
为避免因变形产生的误差影响调平精度,在4个支腿完全着地后,通过3个单轴倾角传感器来检测两个方向上的水平倾角,传感器分布如图2所示。由于同时控制支腿的伸出和缩回难度较大,因此在调平时确定最高点的信息,对其它3条腿单独调节,控制腿伸长的位移量,使它们向最高点逼近。例如图3中支腿2的作用点为最高,则分别控制其余各支腿伸出相应行程,最后达到支腿2作用点所在的水平面。
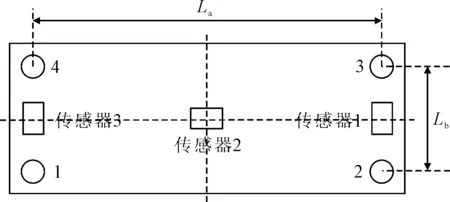
图2 传感器分布图

图3 追逐最高点调平法示意图
2.2 调平策略实现
平台倾斜角度示意图如图4所示,调平策略的实现过程如下。

图4 平台倾斜角度示意图
首先确定最高点:① 当α>0,β1>β2>0时,3腿为最高;② 当α>0,β1<β2<0时,2腿为最高;③ 当α<0,β2>β1>0时,4腿为最高;④ 当α<0,β2<β1<0时,1腿为最高。
在4个支腿完全着地后,调平第一阶段使用角度误差调平法,例如支腿2为最高,则固定该支腿不动,使支腿1、4同时伸出使α值减小,再使支腿3、4同时伸出使β1、β2减小。当倾角值达到系统设定的阈值时,进入调平第二阶段。
追逐最高点的逐点调平法具体实现方法为:假定支腿3为最高,以支腿3为基准,根据过程为式(6),通过β1计算出的行程量调节支腿2,再通过α、β2计算出的行程量调节支腿1,最后通过α计算出的行程量调节支腿4,使平台达到水平面。
追逐最高点的逐点调平法是单独对每个支腿进行调节,虽然调平精度高,但存在调平时间过长的缺点。因此,调平第一阶段的角度误差调平法能弥补这一缺点。
3 调平控制系统设计
液压式调平控制系统的结构简单,驱动支腿动作时动力大,适合重载、大平台调平,同时液压系统动作速度快、传动过程平稳,适合实现自动调平控制。
3.1 调平控制系统的总体设计
车载平台自动调平控制系统原理图如图5所示。微控制器通过RS485串口实时采集3个单轴倾角传感器所检测到的平台倾角并进行分析处理,再发出信号控制换向阀驱动液压油缸,使其推动活塞杆伸出,则3个支腿分别向最高点靠近,直到倾角传感器检测的倾角值达到规定的调平精度为止,并显示倾角值。
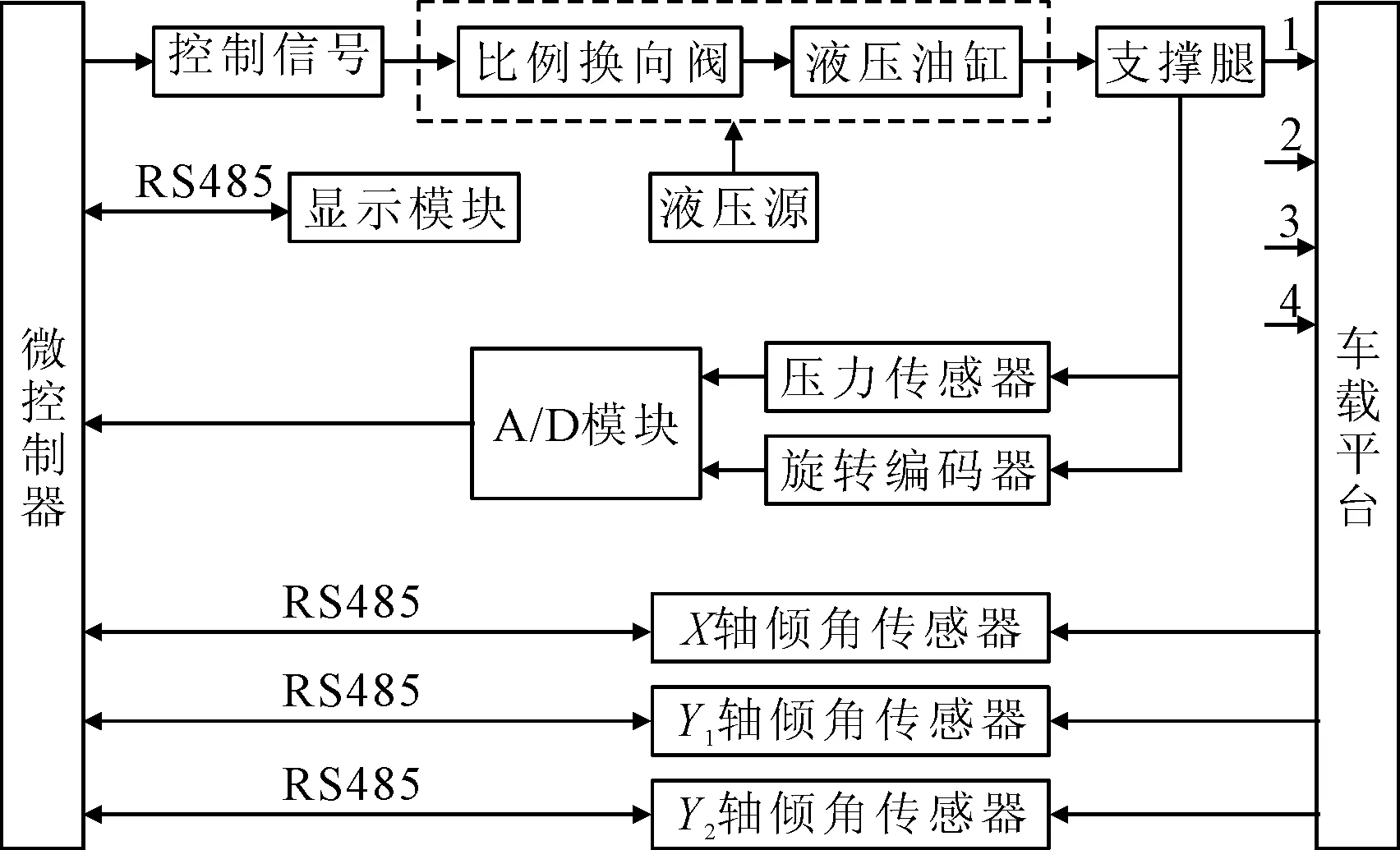
图5 调平控制系统原理图
3.2 液压调平的数学模型
根据平台倾角与支腿位移的关系可知,要使调平达到足够高的精度,支腿动作需具备响应速度快、稳态误差小等性能。通过搭建液压系统的数学模型并加入控制算法来优化调平控制的性能。
3.2.1 比例控制阀的传递函数
在调平液压控制中,为了简化系统的动态特性分析,将比例控制阀视为一阶惯性环节,输入电流和输出流量之间的传递函数为[7]:
(7)
式中:k0为比例控制阀的流量增益;ω0为比例控制阀的频宽。
3.2.2 液压油缸的传递函数
在液压调平控制中,采用非对称的液压油缸,液压油缸的输入流量和活塞杆输出位移之间的传递函数为[8]:
(8)
式中:A为活塞杆的作用面积;ξ1为阻尼比,为0.1~0.2;ω1为固有频率。其中,固有频率的计算公式为[9]:
(9)
式中:βe为液体的体积弹性模量;A1、A2分别为液压油缸无杆腔和有杆腔活塞的受力面积;s为液压油缸的行程;mt为活塞杆负载质量。
3.2.3 倾角传感器的传递函数
本文选用的传感器为瑞芬公司的电流输出型单轴倾角传感器,将传感器检测的平台倾角反馈回微控制器的过程视为单位负反馈环节,其传递函数为:
(10)
式中:I(s)为电流的拉式表达式;φ(s)为倾角的拉式表达式。
3.3 模糊PID控制设计
由于液压元件之间工作特性的差异以及不同工况下负载的扰动都会影响调平的性能,传统PID控制无法完全消除该影响。通过加入模糊控制修正系数Kp、Ki和Kd,从而更好地保证系统的控制精度,消除稳态误差[10]。
笔者设计的模糊PID控制是以平台水平倾角和倾角的变化率作为输入,以支腿的位移量作为输出。模糊控制采用Z型和三角型相结合的隶属度函数,如图6所示,并根据两个输入值修正PID系数Kp、Ki和Kd。模糊子集设定为{NB、NM、NS、Z、PS、PM、PB},其中B、M、S、Z分别表示为大、中、小、零,N和P分别表示正和负。搭建仿真模型时,利用Simulink中的模糊控制模块,设计模糊控制器,其原理图如图7所示。
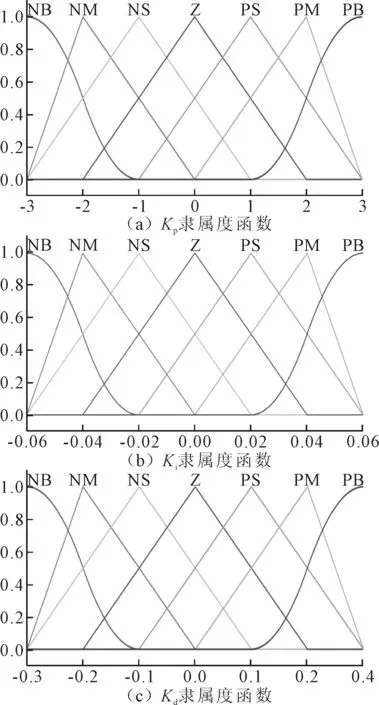
图6 隶属度函数
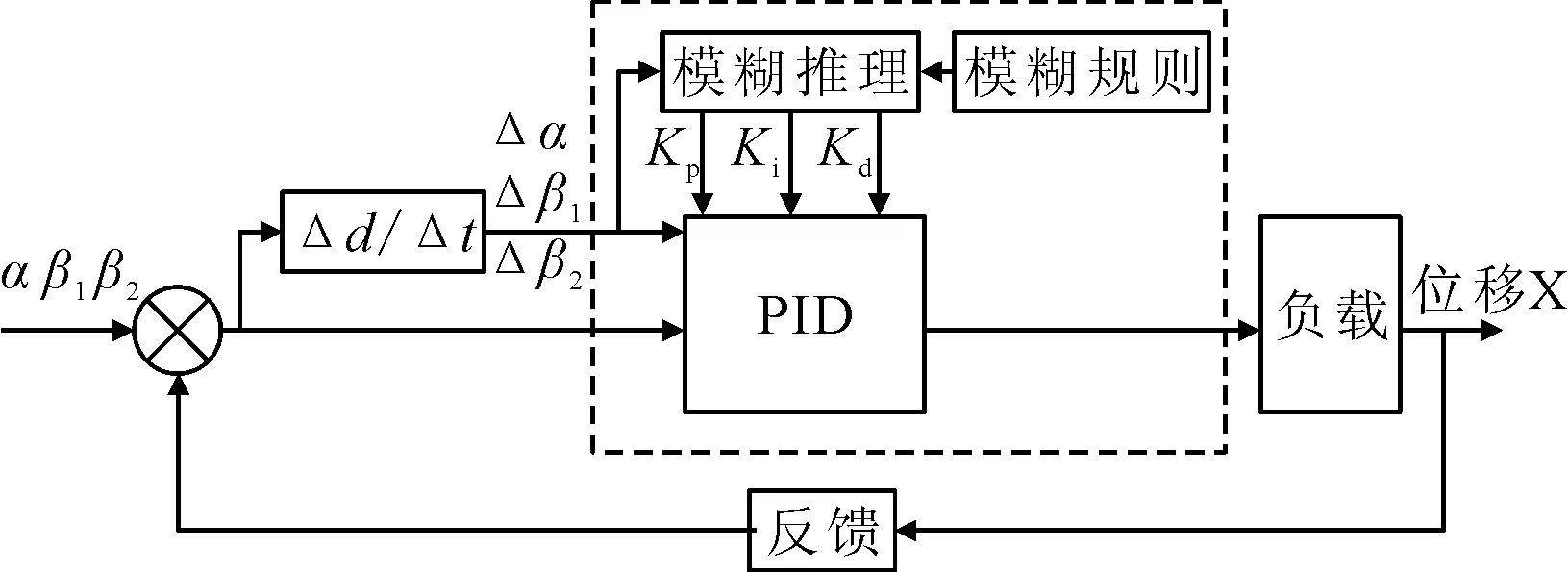
图7 模糊PID控制原理图
3.4 模糊PID控制系统仿真
3.4.1 系统参数和仿真模型
根据车载平台自动调平系统各元件的选型和固有参数,得到系统传递函数中的各个参数值。比例控制阀的流量增益k0为2×10-4m3/s;比例控制阀的频宽ω0为30;液压油缸内径d1为80 mm;活塞杆外径d2为40 mm;液压油缸行程s为800 mm;液体的体积弹性模量βe为240 MPa;活塞杆负载质量mt为10 000 kg;阻尼比ξ1为0.2。
平台在非水平状态下3个倾角的初始值为:α=0.016°、β1=0.012°、β2=0.010°,X、Y轴上两支撑腿之间的距离为La=7 000 mm、Lb=3 000 mm。
给定平台初始条件后,液压调平系统依据调平策略中第二阶段的追逐最高点逐点调平法控制3条支腿向最高点伸出,通过模糊PID控制器进行调平性能的优化,在进行模糊整定时,需要确定比例因子和量化因子,从而得出经过模糊控制矫正后的PID参数。当支腿的高度离最高点相差偏大时,为了快速地减小误差,应取较大的Kp和适当的Kd,但为了保证系统的稳定性,Kp不宜过大,为了消除系统的稳态误差,同时防止超调,应适当加大Ki,最终达到提高调平精度、减少调平时间、稳态误差和保证系统稳定性的目的。
3.4.2 仿真分析
通过Simulink仿真后,得到调平中一条支腿分别在模糊PID和传统PID下调节时间和支腿位移的仿真曲线,结果如图8所示。

图8 模糊PID和PID仿真曲线
从图8可知,虽然常规PID经过多次参数整定,系统仍存在12.6%的超调量,且达到稳定状态时间需要15 s;采用模糊PID控制,系统的响应速度更快,只需2.5 s就能达到稳定状态,无超调,稳态误差小且稳定性高。在模糊PID控制下,当3条支腿向最高支腿点伸出时,3条支腿位移的曲线如图9所示。(仿真时设定支腿3为最高点支腿)。
由图9可以看出追逐最高点逐点调平的策略,调平过程中以支腿3为最高点支腿,按照平台倾角依次驱动其余3条支腿伸出相应位移,当β1和β2的值相差越大时,支腿2和支腿4的位移之和就与支腿1的位移相差越大,这也说明了实际调平工程中平台的变形会导致某一支腿所需伸出位移发生变化,也体现了使用3个倾角传感器测量平台倾角的重要性。另外,当一条支腿达到稳定状态时,下一条支腿开始伸出,整个调平过程稳定性高,所需调平时间少,并且在模糊PID控制的作用下,3个支腿响应速度快,调平精度高,能够达到调平控制的性能要求。
4 结论
(1)针对因车载平台跨度大、平台上雷达设备重而导致平台变形的问题,结合角度误差调平法用时短的优点和追逐最高点逐点调平法高精度和高稳定性的优点,提出了4点3轴角度误差控制和追逐最高点逐点调平相结合的调平策略。
(2)将模糊PID控制应用到液压调平控制中,使用Simulink搭建支腿调平的仿真模型。仿真结果表明,在使用追逐最高点逐点调平的策略下,平台使用3个倾角传感器能够在平台变形的情况下保证调平精度,并且模糊PID控制能有效地抑制超调量和减小稳态误差,则调平过程中支腿不会过度伸出,且平台具有良好的稳定性,另外支腿的快速响应使得调平时间大大缩短。
