新一代大型运载火箭多约束起飞漂移量控制研究
2021-08-23李学锋刘敏劼
张 宇,王 辉,黄 聪,李学锋,刘敏劼
(北京航天自动控制研究所,北京,100854)
0 引 言
国外运载火箭发射时多采用牵制释放方式,发射装置集支撑、牵制、释放功能于一身,能够在火箭点火正常后才将其释放起飞[1]。而中国现役火箭均使用非牵制释放发射方式,火箭通过支撑点竖立在发射台上,点火后当发动机推力大于重力时火箭起飞。中国传统火箭一般芯级直径为3.35 m,助推器直径为2.25 m,通过芯级尾段的4 个支撑点竖立在发射台上;而长征五号火箭直径与质量均大幅增加,芯级直径达到5 m,助推器直径为3.35 m,原有的芯级4 点支撑方式已不能适用,改为助推器12 点支撑。其中,离发动机喷管最近的支点距离只有18 cm,同时火箭周向还存在液氧服务塔、液氢服务塔、脐带塔、固定塔等多点约束,增加了对滚动角偏差的要求,起飞漂移控制要求更加严格,加大了控制系统起飞段漂移量的控制难度。
1 起飞漂移量定义
火箭起飞漂移量是指沿发射坐标系、起飞段内火箭特征位置相对于标准弹道横、法向偏移量。以火箭Z向起飞漂移量为例,其几何关系如图1 所示。

图1 运载火箭起飞漂移量几何关系Fig.1 Geometric Relationship Diagram of Launch Vehicle Take Off Drift
火箭垂直起飞段的漂移所蕴藏的风险巨大,可能会带来灾难性的后果[2]。起飞漂移量是运载火箭的关键性能指标之一,关系到运载火箭发射安全性[3]。
2 起飞段主动抗漂移控制
2.1 长征五号火箭起飞段多约束
传统火箭多采用芯级4 点支撑方式,而长征五号火箭采用助推器12 点支撑,每个助推器3 个支撑点,4 个助推器共12 个支点,芯级没有支点,支撑方式与传统火箭截然不同,支点示意如图2 所示。

图2 火箭支撑点布局Fig.2 Layout of Launch Vehicle Fulcrum
从图2 中可以看出,离发动机喷管最近的支撑点是靠近芯级的4 个支撑点,距离助推内侧发动机喷管的距离只有18 cm,位置关系见图3。

图3 助推器内侧喷管与支撑臂位置关系Fig.3 Schematic Diagram of Position Relationship Between Booster Inner Nozzle and Support Arm
同时火箭周向还存在液氧服务塔、液氢服务塔、脐带塔、固定塔等多点约束。与传统运载火箭相比,长征五号火箭的支撑点不但距离近,而且数量多,另外还有6 个加注服务塔,其中芯级的2 个加注服务塔位于助推器之间,对横向漂移和滚动角偏差均有约束要求。对应到起飞漂移量,要求火箭起飞高度小于0.824 m 时,漂移量小于18 cm;起飞高度小于58 m 时,漂移量小于7 m;2 s 内滚动角偏差小于1.5°。
针对助推器12 点支撑的特点,控制系统采用了多约束抗漂移控制技术,确保火箭安全出塔。
2.2 多约束抗漂移控制
与其它现役火箭相比,长征五号火箭发射平台约束点数量翻倍,且支撑点距离火箭发动机喷管特别近,火箭出塔之前,不同的飞行高度有不同的净空间限制。飞行高度0.824 m 以内,要求发动机喷管摆动幅度小,加之起飞滚转前存在较大的滚动姿态角,存在通道耦合,需降低控制增益;而在58 m 高度附近出塔时,需要提高控制能力,快速减小姿态角偏差,需增大控制增益[4]。为了解决此矛盾,采用了变增益控制:

式中t为火箭飞行时间;a0为控制增益。
即根据箭体不同飞行高度的特点和漂移量要求,实时调节控制增益,以实现满足不同高度的起飞漂移要求[5]。
2.3 滚动通道初始程序角补偿
由于火箭的滚动角偏差对火箭的横向漂移没有影响,所以传统火箭在起飞段对滚动角偏差无特殊要求。但长征五号火箭的芯级加注服务塔位于2 个助推器中间,加之出于某些故障情况下的安全性考虑,增加了对起飞段滚动角偏差的限制,要求飞行时间0.5 s 内滚动角偏差小于0.4°,2 s 内小于1.5°。为了减小起飞段滚动角偏差,采用了对滚动程序角进行瞄准角补偿方法,以减少火箭在起飞出塔段的滚动姿态转动。
火箭竖立在发射塔架,火箭纵剖面与固定瞄准射向并不能完全重合,存在一定偏差,通过惯组瞄准来获取此偏差值。将瞄准角通过式(2)补偿到程序角中,以减少火箭起飞时刻的滚动角偏差:

式中γcx理为理论滚动程序角;γcx为补偿后的滚动程序角;A0瞄为瞄准方位角;θ为瞄准仰角;α′为惯组瞄准棱镜方位轴方向;β′为惯组瞄准棱镜偏航轴方向。
使用经过瞄准角补偿后的滚动程序角,可有效减少起飞时刻的滚动角偏差[6]。
2.4 起飞前起控
在火箭点火起飞之前完成起控,起飞前伺服机构已经开始响应控制指令,起飞时刻发动机摆角处于控制系统需要的角度,可以避免起飞时刻起控伺服机构摆动的过渡过程对火箭姿态产生影响,确保火箭起飞平稳。

图4 火箭起控、点火、起飞顺序Fig.4 Schematic Diagram of Rocket Start Control,Ignition and Take Off Sequence
通过变增益控制、滚动程序角补偿、提前起控时间等技术措施,解决了长征五号火箭起飞段漂移量控制难题。
3 起飞漂移量计算
火箭的起飞漂移计算主要包括运动方程、起飞段姿态控制律、起飞漂移量计算公式与几何关系、干扰因素、起飞漂移量合成方法等[7]。
3.1 运动方程
俯仰通道动力学模型见式(3)~(6):

偏航通道动力学模型见式(7)~(10):
滚动通道动力学模型见式(11):

式中 Δφ为俯仰姿态角偏差;ψ为偏航姿态角;γ为滚动姿态角;Δα为火箭攻角偏差;β为火箭侧滑角;Δθ为弹道倾角偏差;σ为弹道偏角;V为火箭相对发射坐标系的速度;m为火箭质量;M为干扰力矩系数;F为干扰力;Δδφ为俯仰摆角;δψ为偏航摆角。
3.2 起飞漂移量计算公式
以火箭Z向漂移为例,漂移量的计算公式为

式中I1为火箭尾端面漂移量;I2火箭顶端出塔后,当观测点位移塔架顶部时的漂移量;I3为火箭顶端的漂移量。
同理计算Y向的漂移量IiY,之后计算合成漂移量:

3.3 考虑的干扰
计算起飞漂移量时,主要考虑风干扰、火箭结构干扰、发动机推力偏差、初始姿态偏差、零位摆角偏差等。干扰合成可以采用结构干扰各项与初始姿态偏差、发动机干扰、初始摆角均方合成之后与风干扰按线性迭加的方式[8]。
4 控制效果
4.1 数学仿真
对额定状态起飞段仿真,按照考虑姿态角初值、结构干扰、摆角零位、风干扰和同时加入以上干扰5 种状态,数学仿真结果Y向和Z向漂移量曲线见图5,合成后的漂移量I1、I2、I3曲线见图6,滚动角偏差曲线见图7。
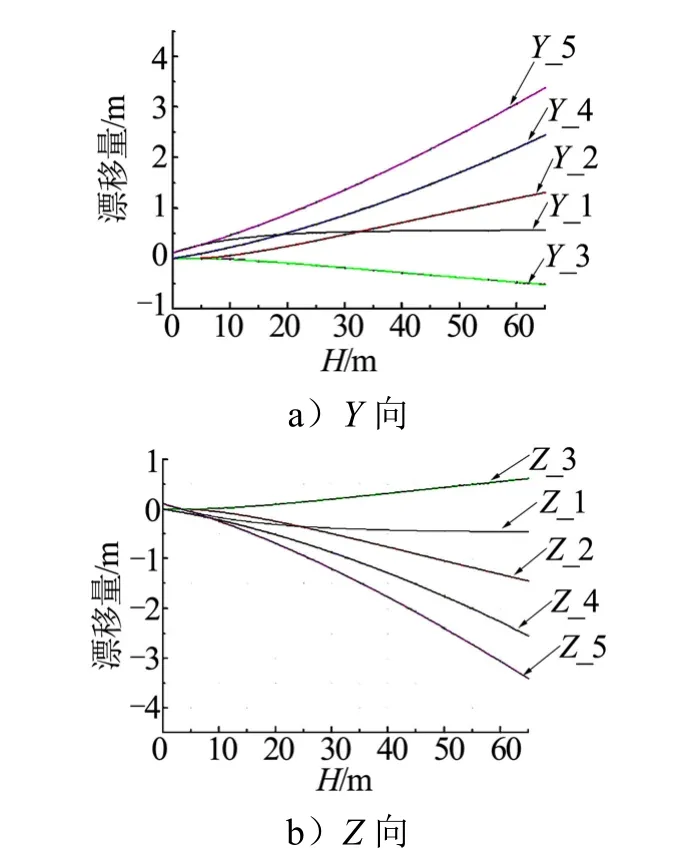
图5 起飞漂移量曲线Fig.5 Lift-off Drift

图6 合成后的起飞漂移量曲线Fig.6 The Resultant Lift-off Drift

图7 滚动角偏差曲线Fig.7 Roll Angle Deviation
从图5~7 仿真结果可以看出,在飞行高度小于0.824 m 时,满足漂移量小于18 cm 的要求,飞行高度小于58 m 时,漂移量满足小于7 m 的要求,且有一定余量。
滚动角偏差在起飞时刻基本为零,满足0.5 s 内滚动角偏差小于0.4°、2 s 内小于1.5°的要求。采用初始程序角补偿方法,可以有效减少起飞时刻的滚动角偏差。
4.2 实际飞行
截至本文截稿时,长征五号系列火箭已经完成6次飞行任务,历次飞行的起飞漂移量统计见表1。

表1 起飞漂移量统计Tab.1 Statistics of Take Off Drift
该技术能够满足火箭起飞段多约束要求,且有一定的安全余量,实现了火箭安全出塔。
5 结 论
本文通过起飞段主动抗漂移技术,解决了火箭起飞段多约束下的漂移量控制问题,并已通过飞行验证。
