月表采样器智能自主运动控制方法及验证
2021-08-22张红军周东李珂张沛韦涌泉于萌萌
张红军 周东 李珂 张沛 韦涌泉 于萌萌
(北京空间飞行器总体设计部,北京 100094)
开展月球探测是航天活动发展的必然选择,我国开展月球探测对于提高综合国力,振奋民族自尊心和增强民族凝聚力具有重要意义[1-2]。月壤样品的采集返回是各航天大国研究月球的主要手段,我国嫦娥五号探测器是探月工程“三步走”战略的最后一步,其总体目标是实现中国首次月面自主采样与返回[3]。国内高校、科研机构针对该任务需求,在采样装置设计等方面开展了大量的研究工作,取得了一定的研究成果[3-4]。月球采样方式可以分为两大类:表面月壤采样和深层月壤采样。表面采样一般使用挖、铲、夹、耙、吸等方式,而深层月壤采样一般使用钻探方式进行[5]。
2020年11月,嫦娥五号探测器携带采集的月壤样品成功返回,标志着我国探月工程“三步走”计划圆满完成。嫦娥五号探测器同时装备了表面采样和深层采样设备,其中月表采样器采用浅层铲挖的采样方式,由于地月距离远导致地月交互效率低,因此在月表采样过程中需要具有很高的自主性,即地球站上注少量的简单指令就能触发采样器完成复杂的运动序列来进行采样。
以抽象的数学方式描述知识的结构及其之间的关系,具有很强的表达能力,可为软件系统的层次结构提供形式化的语义描述[6]。虽然采样器具有多种运动模式、速度、目标位置、运动状态等,但其表述有固定的模式,其核心内容可以抽象为一系列状态、事件、状态迁移、动作等元素的集合,非常适合用有限状态机相关理论进行处理,将采样器的运动控制用统一的数学模型表达[7]。
本文针对该采样器,建立挖掘铲和伸缩铲的运动模型,设计了一种基于模型的智能自主运动控制方法,实现软件对采样器多种运动模式的控制,简化地球站的操作过程,提升采样器自主运动的能力。
1 采样器智能自主运动控制方法
1.1 采样器运动系统构成
月球探测一般可分为载人探测和无人探测,无人探测技术风险较小,能够在非常恶劣的深空环境中开展长期探测,无人探测任务中常用到机械臂[8]。月球表面采样任务就是一种无人探测任务,我国月球表面采样工作由月表采样机械臂系统完成,机械臂共4个关节,即肩偏航关节(关节一)、肩俯仰关节(关节二)、肘关节(关节三)、腕关节(关节四),其中腕关节(机械臂末端)处安装采样器。运动控制单元中装载机械臂智能运动控制软件,控制4个关节和末端采样器运动,运动控制软件接收到地球站上注的月表采样点目标位置后,自主规划机械臂的运动路径,控制机械臂末端运动到采样点上方,随后控制采样器运动进行月表铲挖采样。机械臂系统组成如图1所示。
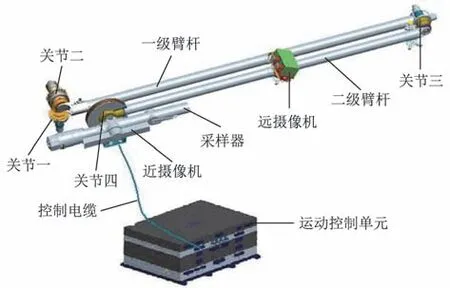
图1 机械臂系统组成Fig.1 System configuration of sampling manipulator
表层的月壤采样面对的是比较松散的风化层土壤,对于表层松散月壤,可以采用铲挖的方式获取。为了提高采样器的机动性,将铲挖分为铲取与挖取两个动作[9]。采样器示意如图2所示,采样器由挖掘铲和伸缩铲两个运动部件组成,挖掘铲运动为绕固定轴转动,伸缩铲运动为直线运动,两个运动部件在采样器内部分别由一个无刷直流电机来驱动,两个运动部件的输出力矩与电机的输入电流成正比[10]。运动控制软件根据运动部件的期望运动模式,生成相应电机的期望速度、期望位置等,输出给运动控制FPGA;运动控制FPGA 根据接收到的控制参数生成驱动信号来控制电机运动,从而驱动两个运动部件运动。
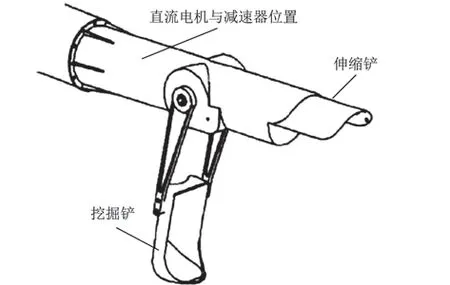
图2 采样器示意图Fig.2 Schematic diagram of sampler
采样器运动系统的组成及控制流示意如图3所示。
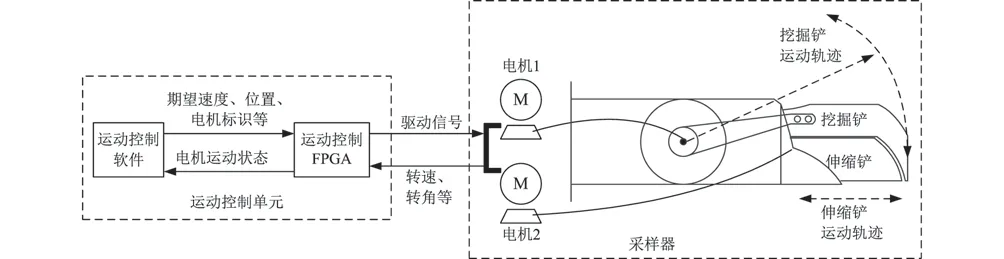
图3 采样器系统组成示意图Fig.3 Schematic diagram of sampler system composition
根据月表采样需求,挖掘铲和伸缩铲分别设计了两种运动模式:挖掘铲打开和挖掘铲关闭,伸缩铲伸出和伸缩铲收回。此外还设计了一种复合模式:复位,用于恢复挖掘铲和伸缩铲的初始状态。采样器系统针对每种运动模式,分别设计一条指令,地球站通过上注指令来触发采样器运动。运动控制软件接收地球站上注的指令,按照指令指定的模式给运动控制FPGA 输出电机标识、期望速度、期望位置等信息,运动控制FPGA 根据这些信息生成驱动电机的脉冲宽度调制(PWM)信号,最终驱动挖掘铲和伸缩铲按照既定目标运动。
1.2 挖掘铲和伸缩铲的运动模型
挖掘铲和伸缩铲的运动模型分为逻辑模型和参数模型,逻辑模型通过抽象部件的运动流程而形成,是软件控制部件自主运动的过程特性;参数模型通过抽象部件运动的各控制参数而形成,是软件控制部件运动过程中的量化特性。
1)逻辑模型
部件的一次单行程运动抽象为一个动作,动作与电机一一对应,具有确定的运动速度、目标位置以及运动到位的判定方法。部件的一个运动流程包含一个或多个动作,用来完成采样器的一项运动,例如,采样器复位、挖掘铲打开、挖掘铲关闭、伸缩铲伸出和伸缩铲收回等。流程和动作的关系示意如图4所示。
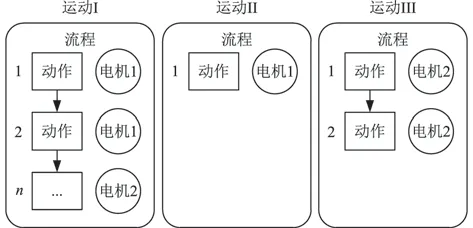
图4 流程和动作的关系示意图Fig.4 Schematic diagram of the relationship between process and action
将部件的一个动作过程分为5个阶段:初始阶段、就绪阶段、启动阶段、结束判定阶段和状态恢复阶段。运动控制软件接收到地球站上注的指令后在5个阶段之间迁移,完成部件的一个动作过程控制。建立部件动作过程中各阶段转移的状态机模型,如图5所示。
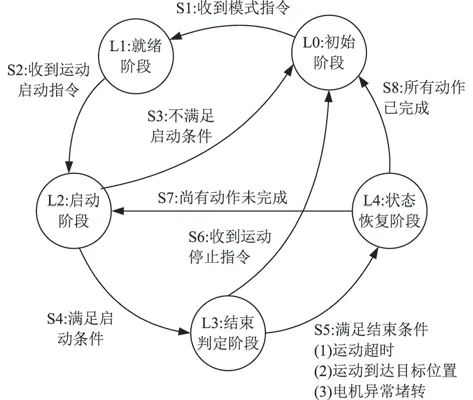
图5 逻辑模型的动作阶段转移图Fig.5 Action phase transition diagram of the logical model
运动控制软件接收地球站上注的指令,按照图5所示状态转换关系控制采样器运动,从参数模型中提取运动控制参数,控制挖掘铲和伸缩铲部件运动,以部件动作为原子运动单元,开展灵活组装,即可实现采样器复杂运动的智能自主控制,采样器运动控制流程如图6所示。
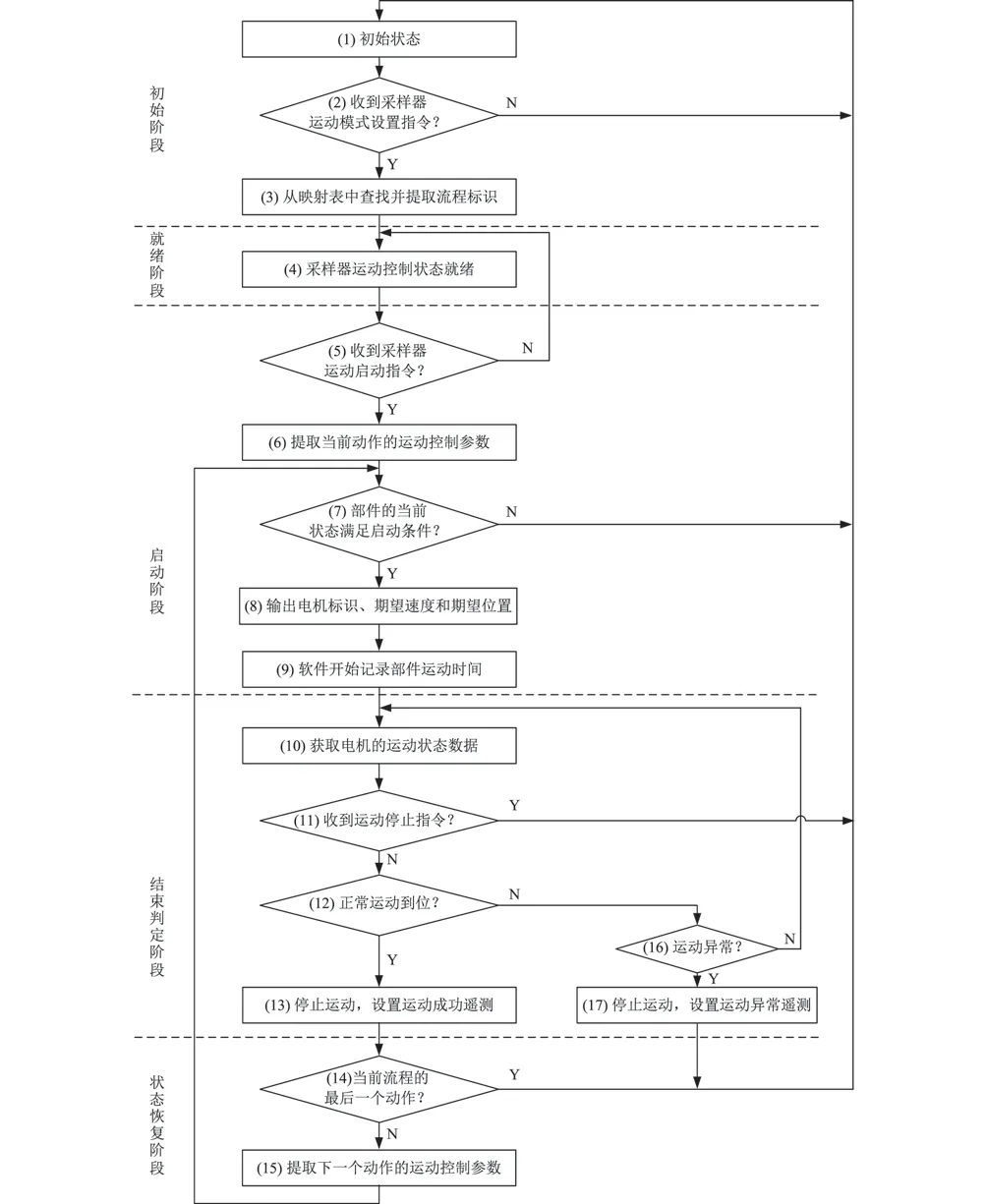
图6 采样器运动控制流程Fig.6 Sampler motion control flow
2)参数模型
参数模型的意义是对于采样器包含多个动作的复杂运动流程而言,只需要配置各个参数,并按照流程需求进行动作排序,逻辑模型按照运动控制流程执行过程中在各状态调度相应参数则可以自主完成采样器的运动控制。
对采样器运动流程中的控制参数进行抽象、分类与合并,形成运动流程的参数模型。参数模型中的参数包括动作个数、当前动作标识与执行顺序、下一个动作标识、动作结束时位置保持标识、部件运动到位的判定方式、部件运动到位的期望位置、期望的运动速度等,如图7所示。
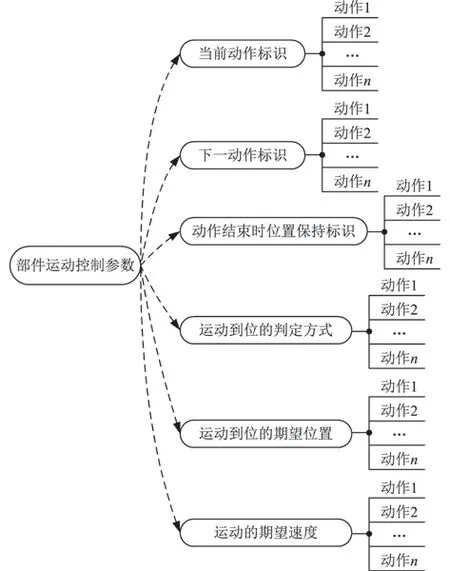
图7 部件运动控制参数模型示意图Fig.7 Diagram of component motion control parameter model
2 采样器运动控制试验验证
2.1 运动零位与方向定义
挖掘铲的零位为闭合状态,闭合为正向运动,伸缩铲的零位为收回状态,伸出为正向运动。挖掘铲和伸缩铲的运动零位和方向示意如图8所示。
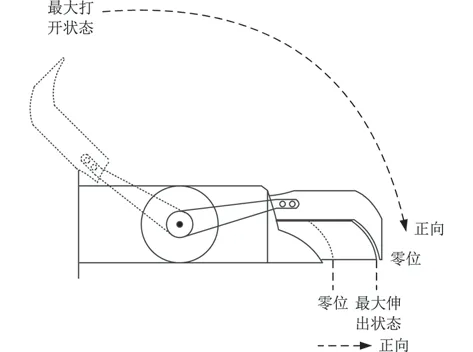
图8 采样器的零位和运动方向Fig.8 Initial position and movement direction of sampler
以采样器复位流程为例,共包括4 个动作,见表1。
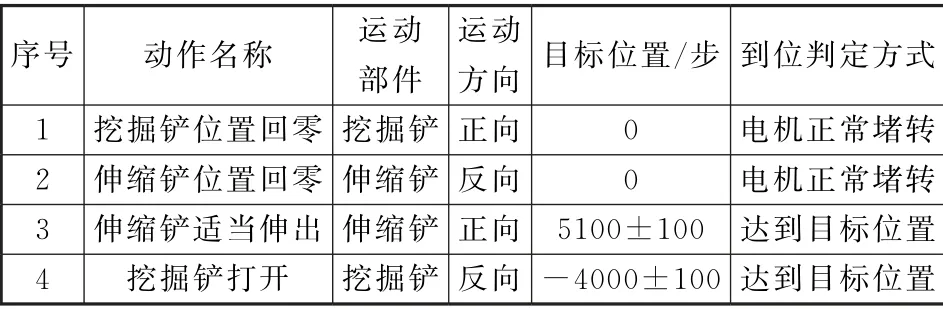
表1 采样器复位流程动作解析Table 1 Sampler reset process action parsing
2.2 验证情况
经过多次测试验证,地球站只需要发送一条复位指令,采样器均能自主完成复位运动,复位过程中挖掘铲和伸缩铲的运动平稳,4个动作之间的衔接流畅无突变,运动结束后的状态满足指标要求,其中两次的运动过程曲线如图9~10所示,运动结束后的实际位置见表2,第一次挖掘铲由闭合状态开始复位,第二次挖掘铲由打开状态开始复位,两次复位伸缩铲均由完全伸出状态开始复位,第一次复位用时101 s,第二次复位用时115 s。
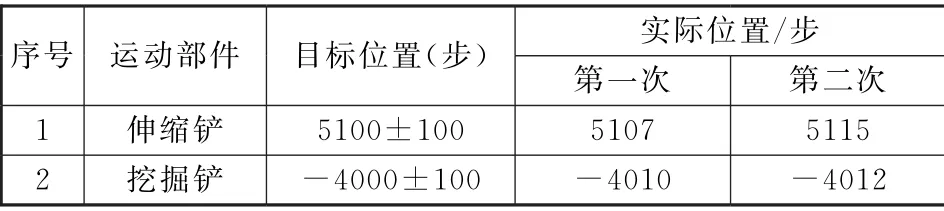
表2 复位后两部件的位置(地球实验室)Table 2 Position of the two components after reset(in earth labs)
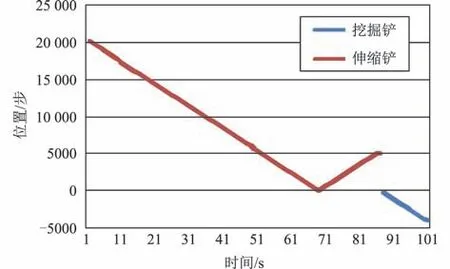
图9 第一次复位过程(地球实验室)Fig.9 First reset process(in earth labs)
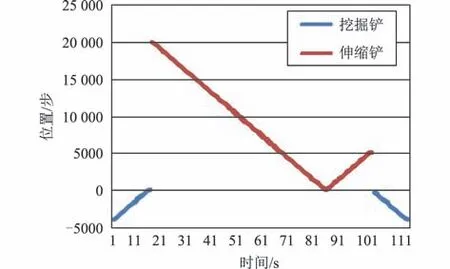
图10 第二次复位过程(地球实验室)Fig.10 Second reset process(in earth labs)
针对采样器其他运动的试验验证,对于复杂运动控制流程,实现了地球站仅发送1条指令即可最多完成10个动作的自主运动控制,有效提升地球站遥操作指令的效能达4~10倍。
2.3 在轨工作情况
由于采样器在地面完成复位流程后随整器发射,因此,采样器在轨工作时,伸缩铲不是由完全伸出状态开始复位,而是由复位后的状态开始复位,即从约5100 步开始复位。2020 年12 月2 日上午,采样器在月面工作,复位过程运动曲线如图11所示。
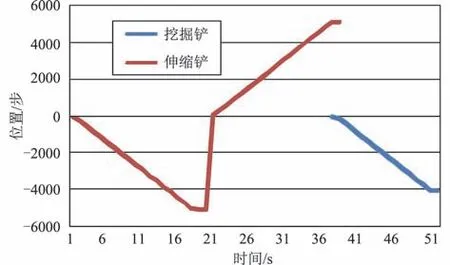
图11 复位过程(月面)Fig.11 Reset process(on lunar surface)
从图11中可以看出,与地面最终复位状态不同,伸缩铲从-13 步开始复位,这是因为采样器在地面最后一次复位后设备断电,软件记录的最终步数清零。此外,由于发射过程中的巨大振动导致机械结构轻微运动,当采样器在月面重新加电后,伸缩铲的步数变为-13 步,即伸缩铲的零位丢失,因此复位时伸缩铲从-13 步开始运动,当伸缩铲收回到零位时,软件完成一次零位标定,随后伸缩铲伸出到复位目标位置,复位结束后两个部件的实际位置见表3。

表3 复位后两部件的位置(月面)Table 3 Position of the two components after reset(on lunar surface)
假设伸缩铲的零位没有丢失,对伸缩铲的初始位置进行平移,那么复位过程的运动曲线如图12所示。
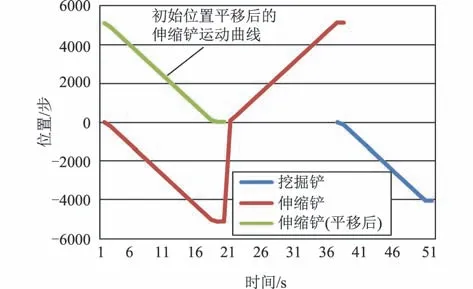
图12 复位过程(月面)(伸缩铲初始位置平移)Fig.12 Reset process(on lunar surface)(translation of initial position)
可以看出图12的运动曲线与图9的运动曲线一致,仅伸缩铲不是从完全伸出状态开始收回,其余运动过程一致,故伸缩铲收回到零位的时间少于地面验证时的时间,整个复位过程用时52 s。
随后采样器进行采样,共完成3个动作:①伸缩铲收回,为挖掘铲铲挖做好准备;②挖掘铲铲挖,具体动作对应挖掘铲闭合,也就是将月壤挖入采样器容腔内;③伸缩铲伸出,与挖掘铲形成封闭容腔。一次月壤铲挖过程两个运动部件的运动曲线如图13所示。
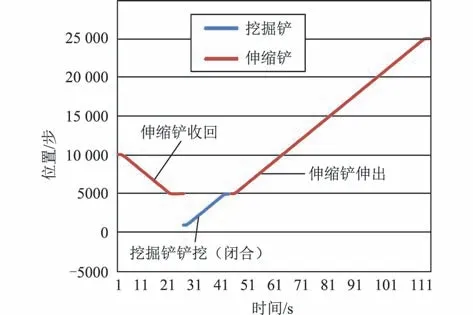
图13 铲挖过程(月面)Fig.13 Digging process(on lunar surface)
3 结束语
本文提出的采样器智能自主运动控制方法,实现了采样器多种运动模式的自主控制,软件可控制采样器通过一系列运动而完成月表采样任务;该方法简化了地球站的遥操作过程,地球站通过上注少量指令即可触发采样器完成多项操作,提升了遥操作指令的效能以及采样器自主运动能力。经过采样器的试验验证以及月面实际采样,该方法能够平稳的控制采样器完成采样任务,采样器运动连续可靠。对采样器在轨采样过程数据进行分析,采样器完全按照设计状态完成采样工作,采样过程与地面试验结果一致,表明该方法可行、有效,满足采样器在月表的采样任务需求。对于后续同类型任务,可完善软件设计,实现采样器在断电再加电后运行状态的保持,设计采样器和机械臂联动控制方法,进一步提升软件的智能化水平。