智能穿戴式复健数据追踪与辅助诊疗平台
2021-08-20李明泽卢玉澄刘晨飞鲍安琪王洪葆
杜 垚,李明泽,卢玉澄,刘晨飞,鲍安琪,王洪葆
(1.西南民族大学计算机系统国家民委重点实验室,四川 成都610041;2.西南民族大学数学学院,四川 成都610225;3.西南民族大学计算机科学与工程学院,四川 成都610225;4.西南民族大学电气工程学院,四川 成都610225)
随着互联网时代的到来,人类与移动应用的联系日益紧密,同时运动损伤人员对于专业的运动康复需求日益增加.坚持长期的训练和科学的理念指导对于康复训练是两个必不可少的因素,国内外的临床研究发现,相当一部分人因为时间、空间问题难以长期坚持康复训练;医师与治疗师缺乏沟通,最终导致患者不能达到康复需求.据统计,国内大约95%的Ⅲ级及以上膝伤患者会到医院就诊,大约15%条件享受诊疗师的专业康复训练,而仅有不足5%的患者能满足运动需求.因此为运动群体在伤病后提供低成本、高质量的康复训练是急需解决的问题.对于此情况,本研究开发了一个具有穿戴功能的智能复健系统,同时可通过体感交互的技术手段,纠正康复训练姿势,从而达到患者数据反馈及时,诊断与康复治疗效率提高的目的.
平台建设是国内康复训练诊疗研究的重点,国内的陈虹团队[1]采用机器视觉识别技术,在摄像技术的支持下,采集并识别了老年人的动作数据,以此追踪老年人复健的数据.但是,易受环境光线的影响是这类复健系统(基于机器视觉原理)的短板.其一,该类系统目前能识别出的动作行为,大多是绑定在大型康复训练器械上,便携性较低.其二,传感器记录数据是这类平台的数据采集主要途径,根据处理器运算,数据库匹配给出训练建议,最终人为分析得出结论.其三,这些平台通常只能针对单一器械(动作),平台与用户不能对多样化训练动作进行交互,从而规范训练者的动作,也不能在训练的同时密切关注医生的医嘱,起不到高效率、高质量康复训练的作用.为填补现有康复训练诊疗平台的不足,本文提出一种智能穿戴式复健数据追踪与辅助诊疗平台,其结构如图1所示.

图1 整体结构示意图Fig.1 Overall structure diagram
硬件模块:MEMS惯性传感数据采集单元(CC2541单片机+mpu6050)用于采集人体的动作数据.数据由串口1传输至PC端;SEMG采集单元(双通道),可同时以100~1000 HZ的频率追踪肌力电信号,数据由串口2传输至PC端,存储数据并可视化展示;Intel Minnow Board嵌入式处理单元(MEMS传感器数据+Kinect V2.0运动数据采集单元<视觉辅助>)、心率传感器、GPS位置等信息以及云端数据,进行结果的比对判别.
软件模块:通过C#脚本,自串口对追踪动作数据信息进行实施读取,向Unity 3D游戏引擎传输,使模型姿态改变,完成动作模拟,在Kinect V2.0 SDK创建并训练分类的自定义动作,使测试集动作能被识别并与标准动作比对.
算法模块:作为平台的核心,保障了动作匹配的精确度,首先,在处理数据完成之后,将动作对应的特征向量提取出来;同时,通过多次训练的类别划分模型(Adaboost算法[2])计算人体动作的相似度;然后,采集大量的训练集与测试集;最后,系统测试和判断置信度.
平台模块:患者利用手机小程序对云端进行访问,将基础信息操作完成,包括训练计划查询、注册、医患在线沟通和训练反馈等,后台导入数据并完成数据比对、传输数据的功能;医生和诊疗师可以在WEB端登录分析患者数据.同时交互端经由趣味信号识别与界面显示等功能完成实时交互.
1 系统设计框架
1.1 膝关节康复训练机理
人体膝关节由髌骨、前、后十字交叉韧带以及半月板组成[3].膝关节的弯曲和韧带的拉伸是同时发生的[4].当人体在做下蹲动作时,前后十字韧带的活动,韧带牵动股骨头运动是膝关节的主要变化之一,因此为实现复健姿势矫正的功能,可以通过监测腿部的动态来观察人体的运动角度变化进行实践[5].
在康复训练的过程(例如深蹲)中,不良姿态的标准认定为膝关节的弯曲角度是否超过90°.
1.2 康复平台用户研究
康复训练平台的用户主要包括:被动用户——即有运动需求的患者;主动用户——即医生及诊疗师;承担一定护理辅助工作的患者家属.本文以患者、医生及诊疗师为主要用户研究对象.
(1)医生和诊疗师实行康复治疗的操作需求.医生诊断身体情况,得出训练医嘱;诊疗师参考医嘱和患者运动需求,制定训练方案.
(2)患者的医疗康复需求.
2 整体结构设计
2.1 硬件模块设计
2.1.1 Wearables单元-MEMS惯性传感数据采集单
近年来,人体动作捕捉系统中运用到了微机电系统[6](MEMS,Micro-Electro-Mechanical System),随着科技的发展,基于MEMS的传感器效率和稳定性都得到了提高.
本单元涵盖了服务器、控制及数据采集模块,下图2即为逻辑和物理结构.
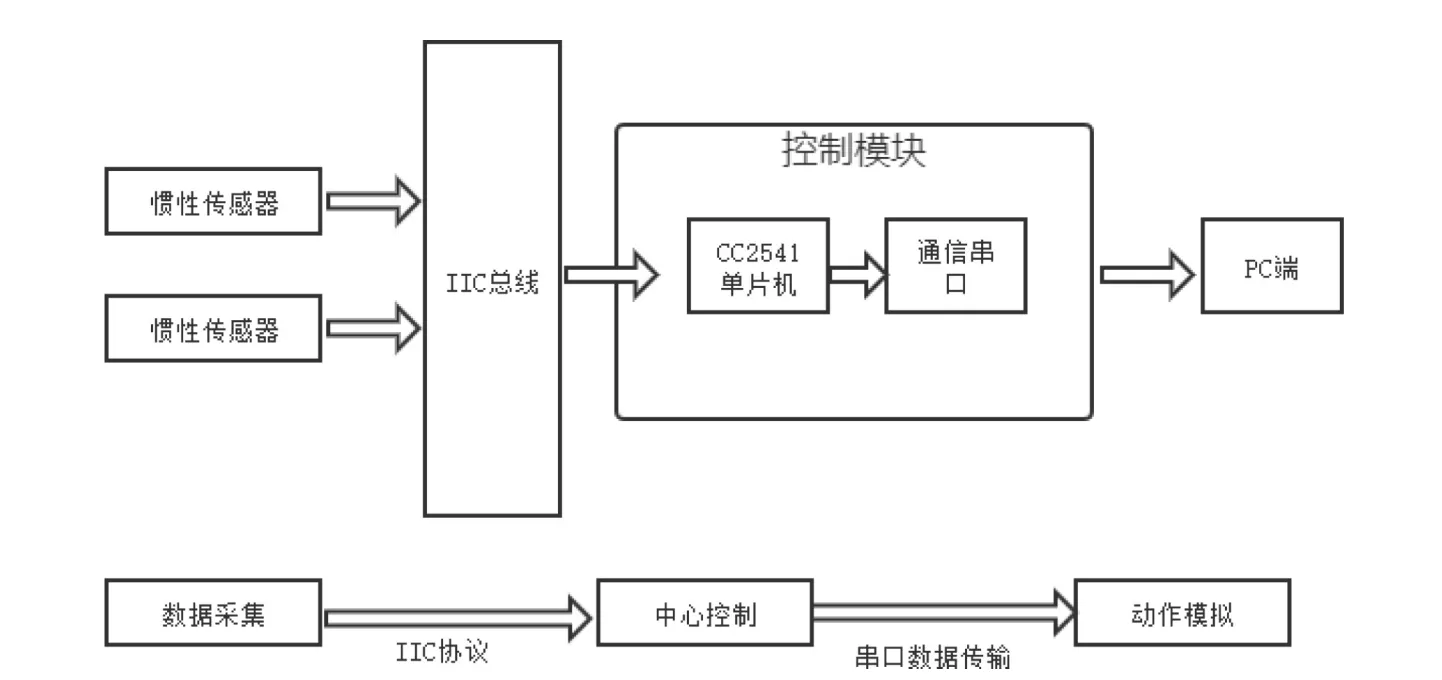
图2 人体动作数据采集物理与逻辑结构Fig.2 Physical and logical structure of human motion data acquisition
CC2541片载系统:
CC2541片载系统搭建的是OSAL操作系统[7],具备注册任务、初始化处理、任务间数据交换、任务同步、时间管理、中断处理和内存配置管理等功能.
射频方面:建立了2.4GHz低功耗规范与私有RF片载系统,可允许不同数据速率的传输;可以远距离蓝牙通讯;可编程输出功率较高;接收器灵敏度较高.
布局方面:有大量外部接口;体积小,大小只有6mm3.
微控制器方面:代码预存取功能性能较高;可编程闪存存储器内存较大;支持扩展基带自动化功能:自动确认、地址解码.
异步接收发器UART(不同串行通信协议);二十三个通用1O管脚:IC接口(本设计选取模拟IC通信)(电路图如图3所示).
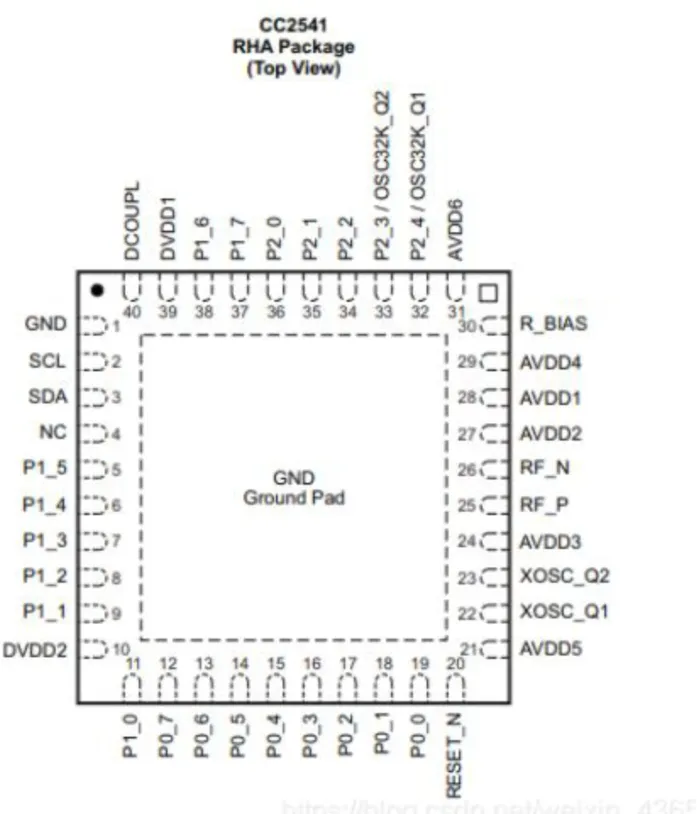
图3 CC2541电路图Fig.3 CC2541 circuit diagram
CC2541片载系统搭建的是OSAL操作系统,具备注册任务、初始化处理、任务间数据交换、任务同步、时间管理、中断处理和内存配置管理等功能.
Mpu6050惯性传感器:
是第一款将三轴陀螺仪与三轴加速度计整合在一起的多组件运动传感器.
工作原理:为得到加速度计三个轴上的及时加速度,以参考电源为基准转化并输出为一个电压值,此时模型动作、位置发生改变,内部集成式电容也随重力场的改变而改变,然后再通过数字模拟将电压模拟信号转换为数字信号就得到了及时加速度.
另外,Mpu6050还拥有以下优点:
● 安装简单便携,当固定在支具上之后,人体可随意活动,不受干扰.
● 具有较高的采样频率,比人体运动频率更大,基本不会出现数据失真.
● 价格便宜,性价比高.
RS232-USB转换芯片:
转换芯片(USB功能控制器和收发器+URAI等通常在数据转换+存储的重要器件PL230311中使用).全双工异步串行通信的功能的实现需要PL2303 USB和RS232,能够经由USB从PC端对数据进行接受和储存,在将其转变成RS232信息流格式之后再进行内部处理,亦或是将RS232获取大的数据变成USB数据格式,向PC端输送,进而进行接下来的更加复杂的操作.
本文采用的RS232-USB转换芯片中结合了USB收发器与功能控制器、URAI等存储或转换数据的重要器件PL230311.PL2303能够使数据在RS232和USB间进行全双工异步串行通信.能够经由USB从PC端对数据进行接受和储存,在将其转变成RS232信息流格式之后再进行内部处理,亦或是将RS232获取大的数据变成USB数据格式,向PC端输送,进而进行接下来的更加复杂的操作.
以惯性传感器为基础有关的人体动作相似度计算的研究多是通过传感器对人体动作数据进行采集,之后利用姿态解算,再经由PL2303向PC端传输过程中使数据变成USB格式,最后将动作数据展开处理及相似度求解.
如图4为简单的屈腿所采集到的数据,各组姿态角间的分割通过“!”完成,不同姿态角的三维数据通过“,”进行分割.
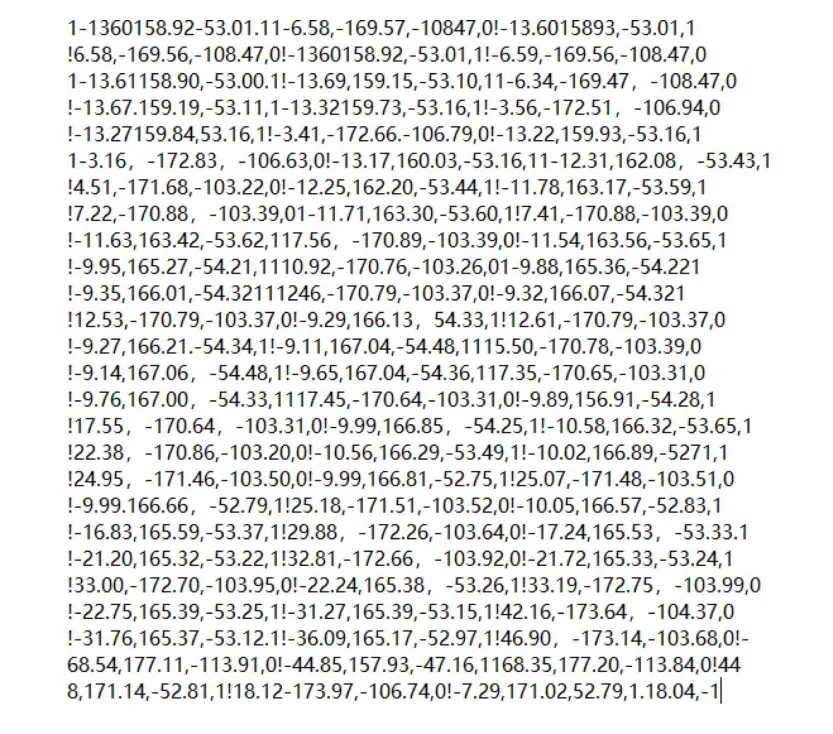
图4 sscom32接收的数据Fig.4 Data received by sscom32
2.1.2 Wearables单元-SEMG信号采集单元
本单元在基于LabVIEW开发的用户界面的编程中加入了RS485转USB的通信模块的基础是Lab-VIEW迅速建立需要的应用工序特点、具备的数据采集系统、仪器变成的便捷途径特点.本文选用SICHIRAY科技有限公司推出的BIOFORCEN表面肌电采集系统对SEMG信号进行获取,下图5即为具体信号图.
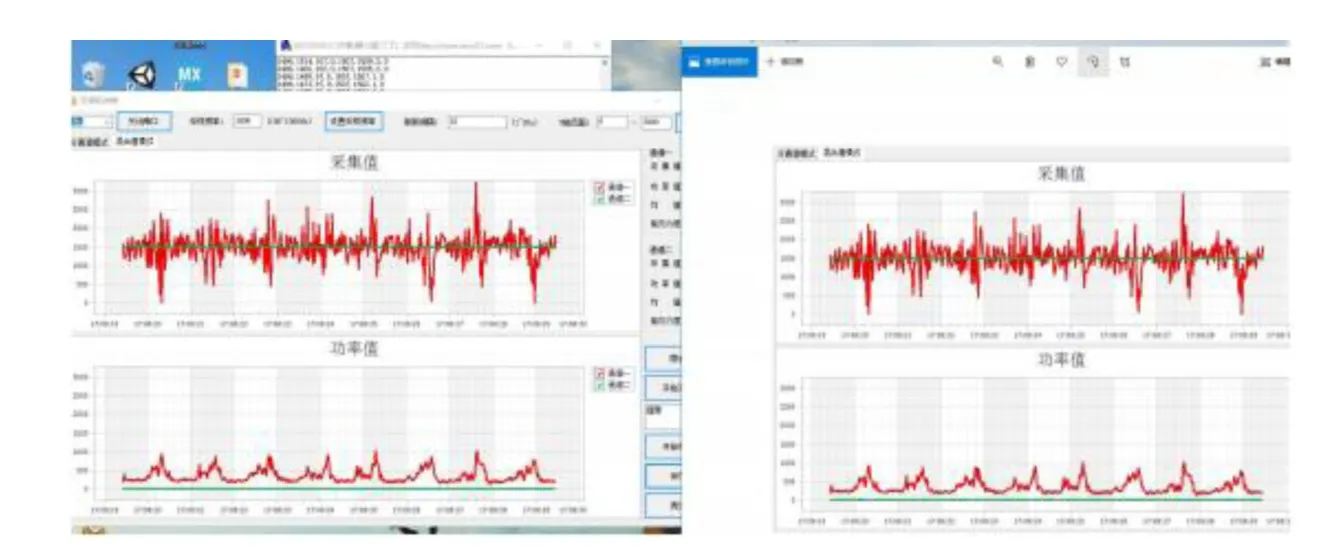
图5 SEMG肌电信号波Fig.5 SEMG signal wave
每个SEMG采集器有2个信号通道,单路通道含3个电极.肌电信号在配套无线接口器与SEMG采集器一起使用时不仅可以直接传输至PC外,还可以进行无线传输.这样SEMG采集器在人体身上佩戴的时候要与PC端保持一定距离,信号采集处理之后会被无线接收器接受,通过接口器处理的数据传输至PC端.
2.1.3 Wearables单元-Minnow Board嵌入式处理单元
基于Minnow Board的嵌入式处理单元[8]Kinect完成的功能主要是对体感摄影机获取的运动数据、以Genuino为基础的传感器节点单元回转的数据与云端数据展开人机交互和处理分析.下图6即为信号流图示.
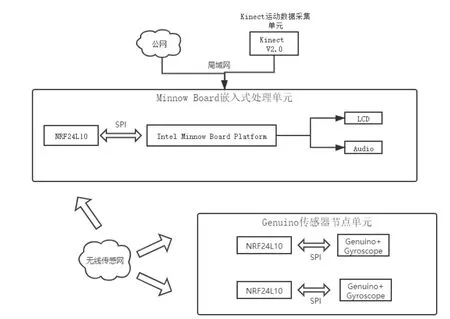
图6 Minnow Board系统信号流图Fig.6 Minnow Board system signal flow diagram
Minnow Board与Kinect运动数据采集单元相连的接口为高速以太网,将Kinect获到的手势与运动识别信息捕获之后,经由SPI接口与NRF24L01无线模块相连,此外会在同一时间五个Genuino传感器节点单元传回的数据.通过USB接口接入3.5 mm外置声卡,将USB信号转化为音频信号输出,使Minnow Board嵌入式平台能实现语音播报功能.同时,通过HDMI接口,Minnow Board嵌入式平台接入液晶显示器后作为图形界面交互输出.
2.1.4 Kinece V2.0运动数据采集单元
①设备概述
2014年11 月,微软公司开发了Kinect V2动感知输入设备,用户在使用Kinect时不用再通过硬件设备,如手柄等进行操作,而是可以通过手势或者语音指令对系统界面进行操作[9].
Kinect(图7)为长条形状,摄像头有两组,其中一组为RGB Camera(彩色相机),用于捕获普通彩色图像源数据里;其中一组是分别处在左侧与右侧的IR Emitters(红外发射器)与Depth Sensor(深度相机或者称为红外相机)组成.我们可以通过对Kinect进行二次开发使其升级、完善,在获取到视野里面用户对应的深度图像.

图7 Kinect V2实物图Fig.7 Kinect V2 image
Kinect V2可以同时识别六个人,并检测到每个人身上的26个关节信息[10],但最大程度上最多能同时分析两个人所提供的骨骼数据.Kinect V2输出视频的帧率为每秒30帧,深度与彩色图像的像素均为640*480.因为理想状态下,对用户可以进行0.8到3米范围内的跟踪识别,因此由于 要确保效果,要将距离限定在1.2到3.5米范围内.探测器在水平方向上的视角范围是43°~57°.
Kinect V2的红外传感器会在一定的视角范围内获取各点对应的深度信息,同时解算空间物体的位置所在.此类红外传感器经由黑白光谱来判断外界的具体环境条件.最远距离用黑色表示,最近距离用白色表示,黑色和白色间的灰色代表视野里面物体的距离与位置等相关信息[11].对获取的深度信息展开光编码处理(原理见下图8),在将其变成附近环境的深度图像之后再按照30帧/s的速度构建图像流,对周围环境进行实施的立体再现(图9).
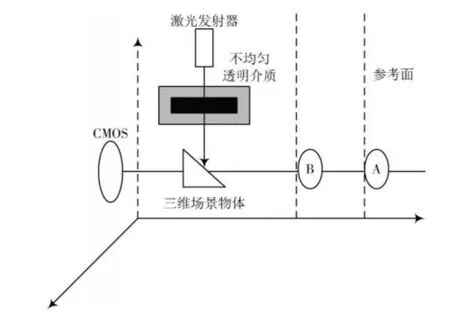
图8 光编码原理Fig.8 Optical coding principle
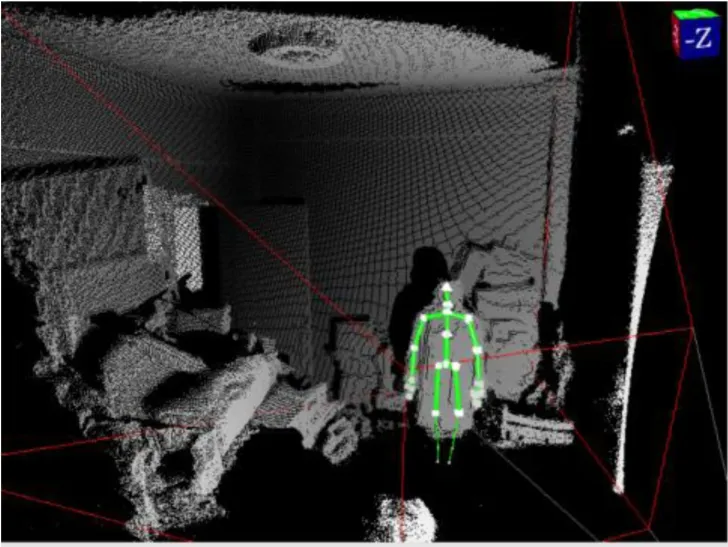
图9 3D深度骨骼定位Fig.93D deep bone localization
②基于Kinect骨骼追踪的肢体运动追踪
在康复训练时,除去患者,医生与家人同样会存在于Kinect视野范围内,因此要利用相应的ID对各组骨骼数据展开分析处理,进而对视野范围内的各类人群信息区分.康复期的患者能够直接将Kinect捕捉到的实时追踪图像获取到[12],此图像是基于深度图像信息在相应的界面区域实时绘制出来的,这样就能够将骨骼对应的视觉反馈信息直接得到.
先进行初始化处理,之后将骨骼追踪模式开启,通过触发的方法将SkeletonStream骨骼流里面的骨骼数据获取到[13].SkeletonStream骨骼流产生的所有数据均为一个骨骼对象的集合,其中涵盖了一组骨架数据结构,各元素均对应这相应的骨架追踪信息,涵盖了能够对骨骼关节坐标及骨骼位置进行描述的数据[14].
2.2 软件模块设计
从辅助康复训练系统的软件程序设计需求上看,需要满足系统对安全监测的超曲锁死、摔倒报警;自定义训练计划生成的功能、人工定制计划功能;医患对于患者需求的沟通;康复师建议、医师复诊功能;姿态监测的数据采集处理;肌电传感监测的量化肌力监测等功能需求作用.通过上述内容,此装置程序对应的需求分析见下图10中内容.
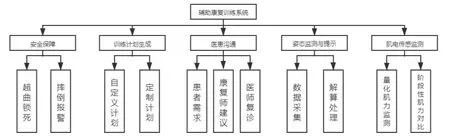
图10 复健监测系统软件需求分析Fig.10 Software requirement analysis of rehabilitation monitoring system
2.2.1 Kinect V2.0 SDK+Unity 3D单元
Windows系统为开放的、人际交互界面良好的应用软件开发系统.此系统的编程环境为Microsoft Visual Studio 2010(windows10),主要就是为了利用软件设计完成动作关节角度的求取与数据的识别跟踪,完成对于视频数据及游戏结果的储存.本章节的软件部分就是通过Kinect V2.0 SDK与Microsoft Visual Studio 2010综合进行的编程[15].
Kinect V2.0 SDK+Unity 3D单元
Unity 3D是集建模与开发于一身的可视化游戏开发软件,具体见下图11.可在不同的平台使用,游戏引擎强大是其最大的优点,为开源普及打下了良好的基础.
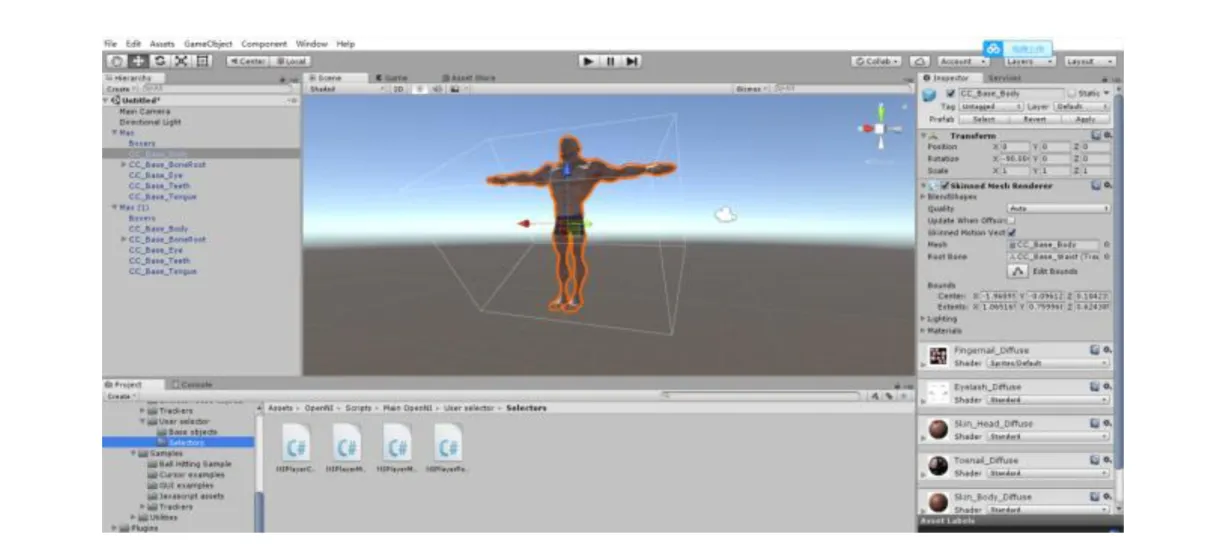
图11 Unity 3D系统Fig.11 Unity 3 d system
Unity 3D拥有统一编辑器,支持多平台操作.其优点之一是:拥有便捷的代码调试器,支持多种脚本编程,在模型运动过程中可以通过设置断点实现单步(step-set)调试的功能,这对观察人体动作模拟过程具有重要意义[16].
其优点之二是支持从外部导入体貌数据不同的模型,不仅节省了建模的时间,一定程度上解决因使用者膝关节数据差异导致的图像变形,而且兼顾了娱乐.
动作模拟主要分为导入模型、添加脚本、模拟动作三个步骤.将3DMAX人体模型导入并在肢体关节部分添加初级脚本,实时追踪串口数据并刷新下肢姿态.
2.3 算法模块设计
2.3.1 数据预处理与特征提取的设计与实现
①数据处理结构设计
要作为分类模型的输入数据,在采集到原始人体动作数据后,就要将数据在PC端进一步操作.数据处理[17](如图12所示)是数据采集与相似度计算的中间过程.预处理与特征提取是数据处理的组成部分,在串口数据处理过程中,需要依次进行数据噪音剔除、归一化处理、数据平滑、特征提取及选取等.
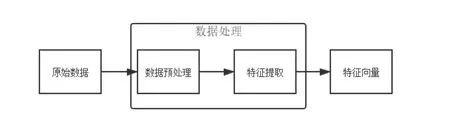
图12 数据处理结构图Fig.12 Data processing structure diagram
数据输入流(采集到的人体动作数据)的预处理工作包括孤立点处理、多项式拟合以及数据归一化.在出事数据的前提下,分别站在微观和宏观两个层面对数据特征进行提取.不但对数据宏观上具备的特点进行关注,还对微观上细节改变规律予以关注.先对统计特征(如:均值、方差、相关系数等)和子序列相似度特征进行提取,之后通过特征对输出动作对应的特征向量进行选取.
②数据预处理的实现
原始数据获取之后,因为数据是不规则的,存在噪音(传感器被外界影响、系统本身稳定性差和人体的抖动均为数据噪音产生的原因),所以需要对数据进行预处理操作.在理想状态下,人体动作的运动轨迹是一条平滑的曲线,这里得到的数据是一条平滑曲线与少量噪音叠加的结果.为将动作数据尽可能还原为运动轨迹(如图13所示),所以需要寻找恰当的数据预处理算法.

图13 人体动作原始数据Fig.13 Human motion raw data
对于数据中噪声的处理可以分为两种,其一是由于硬件数据传输期间引起的孤立点(偏离大多数数据点较远的点);其二是由于目标点抖动造成的波动数据(锯齿状).数据平滑与多项式拟合的方法能有效去除上述噪音,预处理流程如下图14所示:

图14 数据预处理流程图Fig.14 Data preprocessing flow chart
A)孤立点处理的算法原理
均值平滑滤波:设计固定长度的滤波滑窗,可以从数据起始位置一直到结尾.每次滑动均把窗口内的数据平均大小当成处理完成的数据下新数据序列中输入,此新序列即为均值平滑滤波处理完成后的有效数据.
之后,动作数据序列一般会处于连续状态[18].不过因为人体的抖动造成数据抖动、确实及传输失真的原因,要想使人体活动轨迹能够更加精准的再现,本设计通过多项式拟合手段对数据进行了深入的处理.
B)数据拟合的算法原理
数据拟合:通过平滑连续的曲线尽量对数据序列进行无偏差拟合处理,也就是A里面提到的,同时通过函数将曲线表示出来.数据拟合并非需要曲线和全部数据点相符,仅需数据点和曲线中数据点的总距离数值最小就可以.
拟合数据的过程中,要按照数据的实际情况对相应拟合模型进行选取,本设计里面获取的数据是由人体肢体运动姿态不断变化产生的,各周期均有不同的相位、频率及振幅.因此通过多项式函数与正弦函数对人体动作数据进行拟合是最适当的,而多项式比正弦函数在拟合计算方面更加方便.因此,本文采用多项式函数来拟合人体动作数据.本文通过最小误差平方和对多项式拟合算法拟合人体活动数据集的最终效果进行衡量.
最小误差绝对值和:

最小最大绝对值误差:

拟合数据点到曲线的欧氏距离和的平方降到最小.
误差平方和最小:

使拟合曲线尽量逼近离散数据点是误差平方和最小准则的最终目的.
上述多项式拟合算法(基于最小二乘法),最小乘法的损失函数就是误差平方和.最小的乘法的原理是:数据点集合D(x i,y i)的和最小在函数集合P中找到一个最佳函数f(x)∈P让∈D具有最小平方和,具体见下式(4),而多项式拟合指的就是函数集合P里面的函数是多项式函数,也就是.
如此一来,求解的问题最优解即可通过下式得到:

C)数据归一化的算法原理
在人体动作相似度计算方面,采集动作数据时间长短不一致,会造成采集到的数据量不一致[19].后续特征提取、数据处理都需要统一数据量,故对数据进行归一化处理是非常必要的.
在采集数据方面,数据总量与动作复杂度呈正相关.为便于数据比对,需要将动作数据规范统一量纲.
记L(x)为第i个动作的数据序列长度统计,将代表人体动作的拟合函数表示成f(x)(使f(x)处于标准缩放状态),仅需将自变量x与乘以伸缩系数k,k=L(x)/80就可以.
D)特征提取的实现
我们已经得到一个统一量纲下的数据集,虽然人体各运动过程中姿态的改变能够表示处理,在两组动作数据给定的情况下,按照人体骨骼定位就能够初步判断动作的相似程度,但是实际操作中需要可以表征某一类特定动作特点的特征向量,更精确地判断两组动作的相似性,故需要加入特征提取流程(发现数据规律的过程就是特征提取).特征提取的流程图如图15所示.2.3.2 动作相似度计算的设计与实现

图15 特征提取流程图Fig.15 Feature Extraction Flow Chart
分类模型(Adaboost)是动作相似度计算的基础,在经过数据处理之后将动作数据对应的特征向量获取到,能够建立测试集和训练集.通过训练集的训练分类模型,选取相应的模型参数将最优分类模型得到;在分类模型中输入测试集,将预测结果得出,同时对结果进行分析.流程如图16所示.
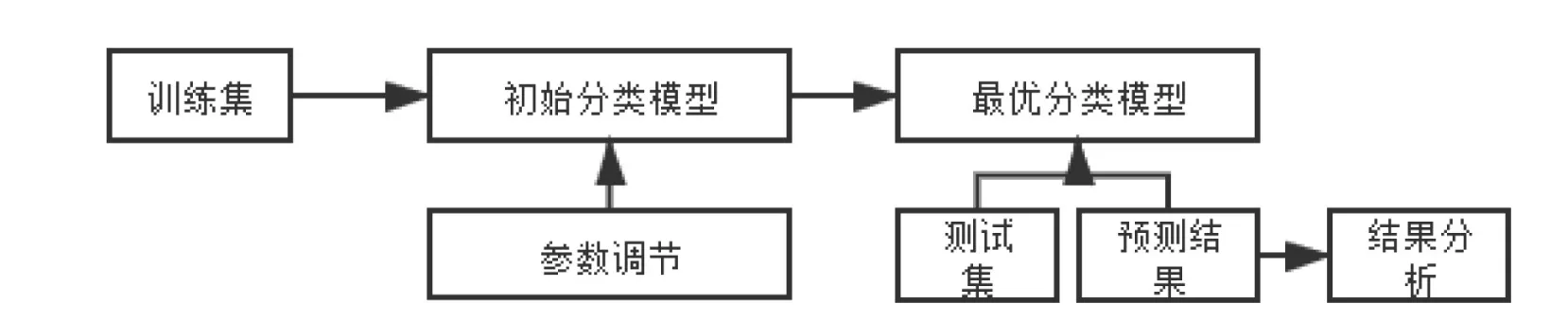
图16 分类模型流程图Fig.16 Flow chart of classification model
2.3.3 模型训练的实现
1)数据集
输入体感交互设备和惯性传感器采集到的数据,用特征提取算法,利用卡方检验方法,将特征从42维/节点降到30维/节点.
2)训练集
数据采集动作:初步分为6种,分别为大、小幅度曲腿、大、小幅度蹲、大、小幅度提膝.参与动作采集的共有20人.在采集数据的时候:每人将上述动作均重复三次,将原始的360组原始动作得到,因为本设计是与人体动作相似度计算相关的研究,因此动作特征是通过数据简单比较得到的.相似度超过2/3,就标记为“动作相似”.结果如下表1所示.

表1 数据采集结果Table 1 Data acquisition results
由于要让正负样本处于数量上的平衡,本研究在负样本里面随机抽样,将正负样本的比例调整到最适,也就是正样本为全量,负样本为随机采样.
3)测试集
二十人各完成规定的动作(六种动作中选一种),共200组,各组含有两个动作.本文对似动作要求较为严格,等以下两种情况均标记为“不相似”:其一为不同的动作幅度差距较大,其二为同一动作但幅度差距较大.
4)分类器分析
经测试,选取弱分类器个数为70,决策树深度设置为30.
2.4 客户端设计
如下图17所示,平台是介于复健者与治疗师搭建的,基于训练和体感交互数据,以Web端和移动端呈现,复健者康复状态能基于数据交互被治疗师实时监测,由治疗师更新康复训练计划和训练建议[20].

图17 数据交互示意图Fig.17 Data interaction diagram
2.4.1 WEB端
通过在原有的框架源码进行修改渲染,制作用户登录注册界面,注册完的用户信息传递到后台数据库进行数据交互,数据交互的过程使用java语言,连接到mysql数据库上,通过中间Tomcat服务器实现小程序与数据库的交互.
①前端
网页框架采用LayUi前端框架进行渲染,在其源码的基础上进行修改,PTS可以在web端查看复健者的康复状况,并由此更新康复计划.
②后端服务器及框架
使用Java语言,基于Spring Tool Suite 4环境开发,使用Tomcat服务器.SpringBoot作为后台的开发集成框架,使用Maven管理项目.
③数据库
使用mysql数据库存储复健者与治疗师的个人信息,通过体感穿戴设备获取复健者康复信息实时更新数据到数据库中.
④数据可视化
前端页面发后台服务器送请求,获取数据库数据,再通过调用脚本对页面渲染,生成可视化图表.
2.4.2 Android程序端
1)用户注册及登录模块设计
用户注册/登录界面如图18所示,对于首次进行康复训练 的患者需要先进行用户名和密码的注册[21].康复训练系统会对 已注册过的用户进行信息录入.对于已存档的患者可以直接输入用户名和密码登录进行康复训练,这样可以对不同的患 者进行跟踪式训练记录[22].
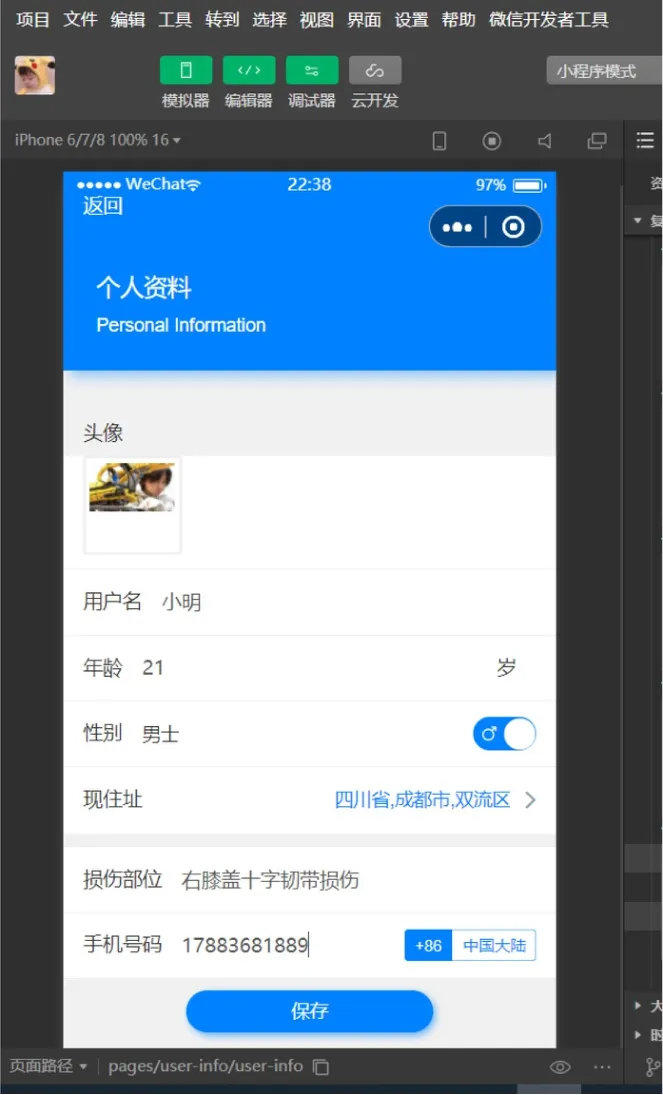
图18 用户登录/注册界面Fig.18 User login/registration interface
2)小程序主界面
小程序主页主要包括用户信息记录,如图19所示,历史信息查询和康复训练系统链接,用于实现不同的功能,其中康复训练系统接口与体感交互设备和蓝牙连接的惯性传感器配合使用[23].

图19 小程序界面Fig.19 Applet interface
3)用户信息记录界面
用户信息记录页面主要用于记录阶段性康复信息[24],具体界面如图20所示,用于显示单次康复信息,查询个人信息,历史信息查询,用户信息与反馈,关于平台的信息.

图20 用户信息记录界面Fig.20 User information recording interface
历史信息查询主要用查询本ID历史上的康复训练记录信息,界面如图21所示.
图21 历史信息查询Fig.21 Historical information query
3 系统测试
3.1 实验设计
为了对系统可靠性进行验证,挑选健康及有膝关节病痛的志愿者共二十位,里面有女性参与者八位及男性参与者十二位,年龄范围为22到28岁.根据系统提示,将康复动作完成,各动作要重复三次.和标准数据库数据进行对比,下表2中列举了系统中重要自身的匹配情况,错误动作1指的是仅将动作整体的前四各分动作完成,错误动作2指的是仅将前三个分动作完成,错误动作3指的是仅将前两个分动作完成,错误动作4指的是仅将前一个分动作完成.

表2 实验设计表Table 2 Experimental design table
3.2 结果分析
实验结果显示,判断关键姿势匹配情况是否完成是具备可行性的,此系统可以将动作信息精准反馈出来,使参与者的动作完成度能够被阶段性的显现出来.如果目标对象的动作在某阶段发生了错误,那么对应的关键字是就会匹配不上,这是,系统可以立即向用户反馈不标准的数据,告知参与者动作不符合要求.此系统不但能够对用户动作进行监视,还能够指引用户动作,同时可以对患者的康复训练数据进行记录,以便医生能够对康复计划进行随时调整,对患者高效、科学的康复训练更加有利.
4 结语
设计开发出了可穿戴使用的智能复健矫姿系统,通过体感交互与传感器数据采集,将人体姿势的检测准确度提升;利用以阈值判定和特征值提取为基础途径完成了人体复健训练姿势的矫正.将以复健平台为基础的系统设计统一结合,是当前市场上常见的软硬件分离问题避免,提高了系统整体的易用性,对规范复健姿势,避免二次损伤具有良好的效果.
此系统对于目前市面上的复健数据监测系统而言,不但佩戴更加舒适,携带便捷,能够完成实时监测,还能够通过配套小程序更加便于系统交互,具备智能性,以便用户更好的维护及管理系统.