基于空间站平台的机器人在轨服务系统架构研究
2021-08-18李京涛许焕宾翟筱羿王勇王敏
李京涛 许焕宾 翟筱羿 王勇 王敏
(1北京空间飞行器总体设计部,北京,100094;2北京控制工程研究所,北京,100094)
0 引 言
在轨服务(On-Orbit Servicing, OOS) 是指在太空中通过人、机器人或两者协同来完成涉及延长在轨航天器的寿命或提升其能力的维护、空间装配和服务任务[1]。国外系统级的有代表性的在轨服务与维护研究项目主要有美国的轨道快车计划、天港计划、凤凰计划,欧洲的赫尔墨斯计划等。这些项目的研究多集中在发射部署专用的在轨服务飞行器、开展在轨服务与维护试验验证,服务周期短,任务单一。空间站平台可以为大规模开展机器人在轨服务提供保障,本文基于空间站平台对机器人在轨服务系统架构开展研究。
1 研究背景
在无边无际的宇宙中,空间站可作为支撑在轨服务与维护的物资库、补给站、停泊港、维修和装配车间,也是设施承载平台、先进技术试验平台和天基指控中心,起到了“太空母港”的作用。以空间站为核心,通过模块化,通用化的思路,通过即插即用的方式建立一套机器人在轨服务系统,以独立或集群的方式完成空间站系统自身维护、故障航天器在轨服务和维护、空间碎片清理等复杂的任务,构建“空间站+机器人”的航天在轨服务新体系,满足航天在轨服务新技术发展要求。
2 基于空间站平台的机器人在轨服务系统架构
为实现基于空间站平台的机器人在轨服务,机器人应具备独立飞行、捕获和维护不同任务对象的功能,并具备停靠空间站平台接受模块更换和功能升级的功能,通过机器人与空间站平台的信息交互实现用户对全任务的监视、指挥、控制、操作和评估。
2.1 关键技术
1)在轨服务机器人模块化设计和在轨重构技术。
为了满足各种空间在轨服务任务需求,在轨服务机器人需要具备可重用、多功能的特点,进行模块化设计,基于空间站平台和航天员,根据任务要求在轨灵活组成多种用途的飞行器,并且各功能模块相互独立,接口标准化,工具包内的操作工具能满足不同具体操作需求。
2)在轨服务机器人对服务目标的识别和跟踪技术。
在进行在轨操作过程中,在轨服务机器人需要时刻跟踪目标,然后接近并进行对接或抓捕,因此,需要研究跟踪测量技术和设备,解决测量问题,突破目标检测与识别技术。
3)在轨服务机器人对服务目标的自主抓捕技术。
对于非合作目标,比如一般的失效飞行器往往处于姿态不受控的自旋或翻滚状态,在对处于此类运动中的非合作目标进行操作时最关键的任务是抓捕。
4)智能服务机器人维护操作技术。
需要研制具有较高智能水平的机器人系统,在较少人类干预的情况下自主适应各种非结构化环境,完成多种多样的维修维护任务。机器人还应通过无线通信与空间站平台进行信息交互,在航天员在轨监视或操控下完成任务,提高任务可靠度。
2.2 系统架构设计
机器人携带在轨服务工具从空间站出发完成对目标的维修维护操作,然后再安全返回空间站平台等待下次任务。基于空间站平台的机器人在轨服务系统应在任务前完成任务规划和工作流程设计,除服务机器人和服务目标外,还要针对监视、指挥、控制、操作和评估功能,基于空间站平台研究通信系统、指挥控制系统、服务性能评估系统等,研究各子系统的实现方案以及相互协作问题。基于空间站平台的在轨服务系统主要包括空间站、在轨服务机器人、测控系统、地面支持系统和航天员系统5个主要部分。
基于空间站平台的机器人在轨服务系统架构如图1所示。

图1 基于空间站平台的机器人在轨服务系统架构
2.2.1 任务规划和工作流程
在在轨服务需求分析的基础上,机器人在轨服务系统的任务规划主要是研究各种任务的共性技术,反映在轨服务的基本特点和关键技术;再依据任务规划,进行整套机器人在轨服务系统的工作流程设计,采用安全化、标准化的方式高效完成各种在轨服务任务。
2.2.2 组成结构
机器人在轨服务系统包括空间站系统、在轨服务机器人系统、通信系统、指挥控制系统、服务性能评估系统、航天员系统等子系统。
1)空间站系统:空间站是支撑在轨服务与维护的物资库、补给站、停泊港、维修和装配车间,也是设施承载平台、先进技术服务平台和天基指控中心,包括模块更换支持子系统、通信支持子系统、监控支持子系统、控制支持子系统等。
2)在轨服务机器人系统:共同构成空间捕获操控通用机器人在轨服务系统操作主体,完成任务规划中的基本任务,包括独立飞行子系统、信息交互子系统、捕获子系统、操作子系统、工具子系统等。
3)通信系统:由空间和地面测控系统组成,共同为服务提供通信和观测等数据网络支撑和服务,包括空间站与机器人通信子系统、天地通信子系统、地面支持子系统等。
4)指挥控制系统:实现航天员和地面指挥人员对机器人的指挥控制,包括在轨指挥控制子系统、地面指挥控制子系统、天地协同控制子系统等。
5)服务性能评估系统:建立地面在轨支持和集成演示系统,为“空间站+服务机器人”在轨任务提供全面数据、影像和管理保障,包括数据采集子系统、数据处理子系统、性能评估和显示子系统等。
6)航天员系统:航天员在空间站内通过遥操作服务机器人完成具体任务或发布具体指令。
2.3 系统架构实现
基于空间站平台的机器人在轨服务系统架构,整个工作周期内的标准化实现流程如图2所示,主要包括:
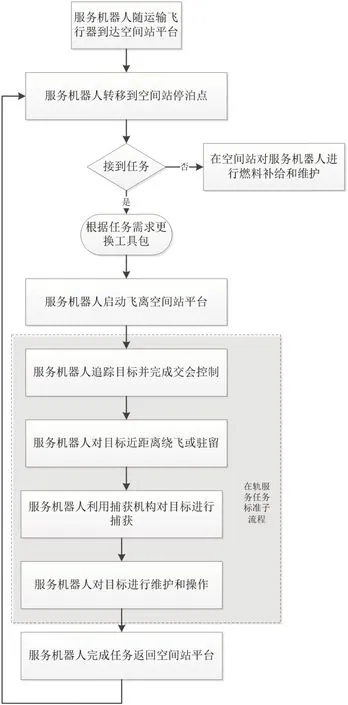
图2 基于空间站平台的机器人在轨服务系统架构实现流程
1)一个或多个服务机器人随运输飞行器发射入轨,与空间站交会对接,停靠空间站;
2)由空间站机械臂将在轨服务机器人从货运飞船货舱转移到空间站;
3)在轨服务机器人启动,与空间站分离,并飞离空间站;
4)在轨服务机器人在不同轨道高度内捕获不同目标,并进行在轨维护服务;
5)服务完成后,在轨服务机器人与空间站交会对接,停靠空间站;
6)针对其他服务目标,在空间站上由空间站机械臂或航天员出舱更换在轨服务机器人其他类型的服务装置;
7)在轨服务机器人再启动,与空间站分离,并飞离空间站,飞向新的服务目标;
8)非任务期间,服务机器人停靠在空间站上,在空间站进行燃料补给和维护。
虽然空间服务目标多种多样,但是整个过程可归结为如下几个步骤:
1)轨道交会;
2)对目标近距离绕飞或驻留;
3)利用捕获机构对目标进行捕获;
4)在轨操作;
5)完成任务自动返回。
3 应用前景
3.1 空间站平台维护和功能扩展
空间站上可以开展多种试验,包含空间天文、地球科学、空间基础物理、空间物理与空间探索、空间材料科学、空间生命科学和生物技术,以及新技术试验等等。试验项目需求量不断增大,但空间站外表可布局试验设备的空间很有限,需要在轨进行结构扩展。例如,在轨服务机器人系统可用于空间站扩展桁架结构的搭建,如图3所示。

图3 空间站桁架搭建示意图
在轨服务机器人通过自主爬行或飞行到工作位置,并将运输飞行器运输的桁架元素单元进行搭建,机器人操作任务主要包括桁架支撑杆的抓取与转移、多方向连接节点抓取与转移、快速锁紧装置视觉定位、力操作模式锁定连接等,可以大幅减少航天员工作量,并能实现长时间工作,提高空间站扩展桁架搭建效率。
3.2 空间碎片防护
自从人类发射第一颗人造卫星以来,执行航天任务产生的火箭抛弃物、失效卫星漂浮在地球周围,相互碰撞产生了大量空间碎片,地面测控系统可以监测和预警直径大于100mm的空间碎片,目前有几万个之多。若空间碎片击中空间站平台,会造成电源失效、氧气泄露、动力学丧失等严重后果,对航天员安全影响巨大。空间站平台在地面控制下进行主动规避,但空间站平台体积和重量很大,每次规避需要消耗大量燃料,并且规避过程会缩短空间站平台寿命。
在轨服务机器人可用于捕获与清理空间碎片。当接到预警报告时,地面或航天员控制机器人更换操作工具,机器人携带飞网式碎片抓捕模块飞离空间站,利用灵活机动能力,主动向空间碎片接近,定位碎片后抛出飞网捕获碎片,并拖拽碎片至空间站或实现碎片有控再入,如图4所示。针对不同碎片,机器人也可以携带不同碎片抓捕工具,比如绳系工具、激光或离子清理工具等。

图4 飞网捕获空间碎片示意图
3.3 航天器救援
从历次航天器发射失败任务统计分析,由太阳翼故障未能展开的能源故障、通信天线未能展开的通信故障所导致的失败问题占到50%以上,并且主要发生在中低轨道上。在这种危急时刻,可以空间站为母港,迅速派出救援在轨服务机器人飞向并捕获故障飞行器,辅助排除故障。在救援过程中,机器人更换救援工具包,主要包括辅助太阳翼、通信天线展开的剪切工具。机器人接近故障航天器,并自主辨识失效航天器的自旋速度,捕获故障飞行器,迅速展开救援工作,并将图像通过空间站平台中继传到地面,为地面决策提供依据。若现场救援无效,机器人将故障航天器拖拽到空间站,由航天员出舱进行维修。
3.4 舱外航天员辅助和救援
空间站长期运营时需要安排航天员出舱开展各种科学试验,或者完成设备安装和更换工作,工作量大,并且具有一定危险性。在轨服务机器人可以在舱内航天员控制下,辅助舱外航天员工作,减少航天员体力消耗,提高工作能力和效率,机器人辅助任务主要包括携带航天员工作工具、抓取和固定维修设备、照明和摄像、重复简单操作等。当航天员由于误操作与空间站舱体断开连接时,只靠航天员无法再返回空间站,威胁到航天员生命安全,此时在轨服务机器人可飞向并捕获航天员,并将航天员带回空间站。
4 结论
本文提出的基于空间站平台的机器人在轨服务系统架构,可充分发挥空间站作为“太空母港”的物资补给、长期停泊、维修支持作用,大大提高机器人在轨服务的能力,并且机器人还能大大扩展空间站平台的应用方向,提高自身性能和对其他航天器的支持能力,有效满足未来飞行任务需求。
