行业动态(新技术)
2021-08-18

机器鱼学会匹配水流速度游动
自然界的鱼有一个称为侧线的感觉系统,可以检测水中的运动、振动和压力梯度,现在科学家模拟此系统,改进了当前机器鱼的性能,让机器鱼可以根据水流环境,确定最佳的游泳速度。
这项研究来自德国马克斯·普朗克智能系统研究所、首尔国立大学和哈佛大学的研究人员团队,他们设计出一条机器鱼,该机器鱼能够抵抗流经水箱的水流在原地游动。研究人员表示,该机器鱼将使人们能够测试和完善关于动物游泳神经力学的假设,并帮助人类改进未来的水下机器人。
研究人员沿着机器鱼两侧设计一系列相连的硅胶腔室,空气交替地从一侧泵入腔室,从另一侧泵出腔室,这导致充气侧膨胀并向外弯曲,而放气侧向内卷曲。据此原理,机器鱼的侧线系统由两个液态金属填充的硅树脂微通道组成,沿侧面纵向延伸,当这些通道中的任何一个在主体的那侧弯曲伸展时,内部液态金属的电阻都会变化。研究人员通过监视电阻的变化,可以确定给定的气压导致机器鱼身体起伏的程度。由此,研究人员建立了一个自学习系统,与机器人相连的计算机测量出水流速度的变化,然后根据这些信息自动调整气压。这样可以设计出机器鱼能够持续保持与水流速度相匹配的游泳速度,在河流等自然环境中,这将使机器鱼可以在原地停留,不前进时不会被冲到下游。
(玑微)
可在运动中自愈的水下机器人问世
美国化学学会(ACS)的研究人员日前研究出一种小型的游泳机器人,该机器人可以自我磁疗,例如在执行任务时被分解为几块,则水下机器人会使用研究人员设计的模仿活体组织愈合特性的方法,将自己拼凑在一起。
一般游泳机器人是使用易碎的聚合物或柔软的水凝胶制成的,这些聚合物具有开裂和撕裂的倾向。研究人员设计出的游泳机器人,大小约长2cm,形状像一条鱼,包含导电底层、刚性疏水中间层和强磁性微粒条带。
这种机器人在运动时可以自行“愈合”,而无需人类或外部触发器的帮助。为了给水下机器人增加推进力,研究小组在其尾部添加了铂,铂与过氧化氢燃料反应形成氧气气泡,可以推动机器人活动。
研究人员将机器人放置在装有稀过氧化氢溶液的培养皿中,它可以在盘子里移动,如果用刀片将机器人切开,则其尾巴一直在移动,一旦接近身体的其余部分,它就会通过强烈的磁性反应重新附着在一起。
这项研究拓宽了机器人技术领域,例如可以利用该技术同步化水下机器人,以监测和清洁环境。
(玑微)
Skyfront无人机创造多旋翼耐力世界记录

美国Skyfront公司的Perimeter 8无人机日前实现在空中停留13h3min57s,飞行330km,创下世界无人机耐力飞行新的记录,该记录以前由韩国Metavista公司的氢燃料电池驱动的四轴飞行器于2019年4月创造。
Skyfront公司成立于2014年,总部在美国加利福尼亚,其研发工作旨在突破多旋翼无人机的飞行时间界限。
Perimeter 8的飞行外形尺寸为2m x 1.9m,由Skyfront专有的燃油喷射油电混合动力系统提供动力,标准的Perimeter 8具有超过5h的无载荷最大续航时间和177km的航程,此次打破记录的飞机配备了一个辅助燃料箱,使飞行时间增加了一倍以上。
软腿机器人像海龟一样行走
近日圣地亚哥大学的研究人员展示了一种柔软步态的机器人研究成果,该机器人由管子和阀门制成的气动回路系统控制其步态,行走起来与海龟相似。
这种由空气驱动的神经系统可以从单个压缩空气源按顺序启动多个自由度,从而大大降低了复杂性,并为机器人本身带来了基本的决策形式。该机器人具有四只腿,有一些很难制成软元件的组件,包括压力源和必要的电子设备,研究人员设法获取了一种压力源(一个牵引绳或一个车载二氧化碳存储筒),并使用一个完全振荡的三阀回路将其引导到四个不同的支腿,每个支腿具有三个不同的气室。
据介绍,该机器人的设计灵感来自生物界。自然界生物,例如四足动物,依靠中枢神经(CPG)支配四肢重复运动,或行走,或游泳,或奔跑。CPG的基础结构基本上只是一个重复回路,该回路依次驱动肌肉以产生稳定连续的步态。在这种情况下,CPG要成对地驱动对脚肌肉,从而产生对角对联步态,对角的四肢同时向前和向后运动。
研究人员设计的回路由三个管道连接的双稳态气动阀组成,通过为流经其中的气体提供阻力,可以改变管子的长度和内径来调节阻力,从而起到延迟的作用。在回路内,加压气体的运动既是能量的来源,也是信号的来源,因为回路中的压力无论在哪里,腿都是在移动。最简单的电路仅使用三个阀,可以使机器人沿一个方向行走,更多的阀可以添加更复杂的腿部控制选项。
这项工作与美国喷气推进实验室为探索金星而开发的流动站有相似之处,该流动站不是软体机器人,但它在类似的技术约束下运行。
(来源:科学机器人)
新一代无人机如昆虫展翅

昆虫在飞行中具有非凡的特技和韧性,能够在各种充满挑战的环境中飞行。根据昆虫的这些特性,麻省理工学院、哈佛大学和香港城市大学的合作研究团队,突破了可克服环境约束的技术瓶颈,成功开发出接近昆虫敏捷性的新型无人机系统。
这种新型无人机如昆虫大小,看起来有点像一个带机翼的小型盒式磁带,重量只有0.6g,约和一只大黄蜂一样。该无人机使用新型软舵机提供动力,可以在非常复杂的空间里运动。其软舵机由涂有碳纳米管的薄橡胶筒制成,当电压被施加到碳纳米管上时,就会产生一种静电力,挤压并拉长橡胶筒。反复地伸展和收缩机理可以使无人机机翼快速拍打起来,每秒拍打近500次,并使无人机经得住颠簸与碰撞,具有前所未有的昆虫般的灵巧性和韧性。
(来源:IEEE)
利用超声波研究大脑控制机器的方法取得进展
目前,科学家们正在想方设法通过意念控制机器设备,其中用超声波的方法最近有了新进展。
美国斯坦福大学神经科学家克里希纳·谢诺伊(Krishna Shenoy)和加州理工学院生化工程师米哈伊尔·夏皮罗(Mikhail Shapiro)在两只恒河猴的头骨中放入了大小和形状都差不多的小型超声波换能器。该设备通过电线连接到计算机,再将声波传播到猴子大脑的后顶叶皮层区域,该区域与运动相关。研究人员通过使用超声波成像来了解猴子眼睛或手部运动时大脑的反应,同时将预测信息转换为机械臂或计算机光标生成命令。
研究人员进行的一组实验是训练猴子将眼睛聚焦在计算机屏幕中央的一个小点上,而第二个点在左侧或右侧短暂闪烁。当中心点消失时,动物将眼睛移到最近第二个点闪烁的位置。在另一组实验中,猴子伸出手移动操纵杆。研究人员通过计算机学习超声数据,然后对猴子意图进行猜测,如猴子何时准备移动、是否要移动眼睛或伸出手臂等。
据报道,现在研究人员可以以大约78%的眼动准确度和89%的手动准确度来预测某个运动是向左还是向右。如果可以改进这种方法,它可能为瘫痪病人提供一种无需植入设备的侵入性较小的方法实现大脑对假肢的控制。
(来源:science)
DeepMind研制会外交游戏的机器人
DeepMind 公司因为研制出会下棋的人工智能AlphaGo和AlphaZero而声名鹊起,如今他们将注意力转向了另一种棋盘游戏:强权外交(Diplomacy),也被称为外交或者外交风云,是经典的桌面游戏之一。该游戏与围棋不同,它是七人游戏,需要游戏玩家既竞争又合作,并且每回合玩家都会同时进行移动,因此,每个玩家都必须推理其他玩家的想法,非常复杂。
DeepMind公司的计算机专家Andrea Tacchetti表示,一个能玩外交游戏的人工智能软件,与游戏Go或国际象棋等软件相比,是一个本质上不同的技术。去年12月,Tacchetti和合作者在NeurIPS会议上就其系统发表了一篇论文,该论文介绍了能玩外交游戏的AI系统策略。
“强权外交”的游戏规则是:将欧洲地图划分为75个省,玩家建立并动员军队占领各省,直到控制了大部分补给中心的玩家获胜。玩家每回合先写下自己的行动策略,然后执行。每个玩家可以攻击或防御对方玩家,或者支援对方玩家的进攻和防御,建立联盟。在完整版游戏中,玩家可以相互协商。为了方便人工智能研究,DeepMind公司使用了简单版的“No Press”策略,即不需要人工智能软件发布策略与其他玩家进行沟通。
DeepMind公司利用了前人的经验,他们根据15万个游戏的数据方案,训练了一个称为DipNet的神经网络,在DipNet中添加了一个“SearchBot”搜索玩家策略,SearchBot 通过几个回合的玩耍来评估玩家的每种潜在策略(假设每个人都根据神经网络的首选选择后续行动)。最终的策略不是一个最佳行动组合,而是由50 个可能行动组成的一组概率(由神经网络建议)。
经过训练后,SearchBot在强权外交游戏的网站上与人类进行了匿名比赛,在玩家中排名前2%。Facebook的计算机专家Adam Lerer说:“这是第一个被证明能与人类竞争的机器人”。
(玑微)
电子科技大学研制出生理信号AI处理芯片
ISSCC是芯片领域的最顶尖会议,在2021年的会议上,电子科技大学信息与通信工程学院周军教授团队介绍了在人工智能芯片领域的最新研究成果,一种超低功耗、可重构、支持自适应学习的生理信号AI处理芯片(BioAIP)。
未来可穿戴/植入式智能健康监测设备的一个核心模块是生理信号AI处理芯片。一方面,现有的通用AI处理芯片功耗一般在毫瓦级别,不适合超低功耗可穿戴/植入式健康监测。另一方面,已有的生理信号AI处理芯片只能支持单一的AI健康监测任务(如心电识别、癫痫检测、运动感知、情绪监测等)。此外,生理信号可能在不同人身体上有较大差异性,在实际应用中,预先训练好的生理信号AI分类算法可能对某些病人的识别准确率会大幅下降。
为解决以上挑战,周军教授团队设计了具有硬件重构能力的神经网络处理引擎,可以完成不同的神经网络结构计算,从而支持不同的生理信号AI处理算法。同时,设计了多种可灵活配置的生理信号处理引擎,如可配置滤波模块、峰值检测模块、信号分窗模块等,从而支持不同的生理信号预处理任务。二者相互结合,可用于多种不同的AI健康监测应用。在此基础上,该团队还提出并实现了一系列超低功耗芯片设计技术,如事件驱动神经网络处理架构,片上数据近似压缩技术、神经网络/预处理引擎复用技术、自适应生理信号压缩技术等。在心电识别、癫痫检测、运动感知等多个AI健康监测任务中,达到了小于6微焦的极低分类能耗。另外,该研究针对生理信号病人间差异性,提出了一种低复杂度自适应学习技术,使得AI算法可以学习不同病人的生理信号特征,从而大幅提升准确率,又不增加太多功耗。
据介绍,该AI处理芯片可以用于多种可穿戴/植入式智能健康监测设备,具有广阔的应用前景。
周军教授团队主要研究面向智能感知终端的人工智能专用处理芯片设计,面向图像感知、可穿戴健康监测、声音感知、电磁感知等应用,通过芯片与算法协同设计,构建智能化、低功耗、微型化的软硬一体化智能感知解决方案。团队参与了多个国家级重点研发计划项目,与商汤、华为、京东方等知名公司横向合作,研究成果曾获得IEEE电路与系统学会论文奖、中国发明创新奖、中国产学研合作创新奖、吴文俊人工智能技术发明奖等。
(玑微)
智源与清华大学联合开源FastMoE
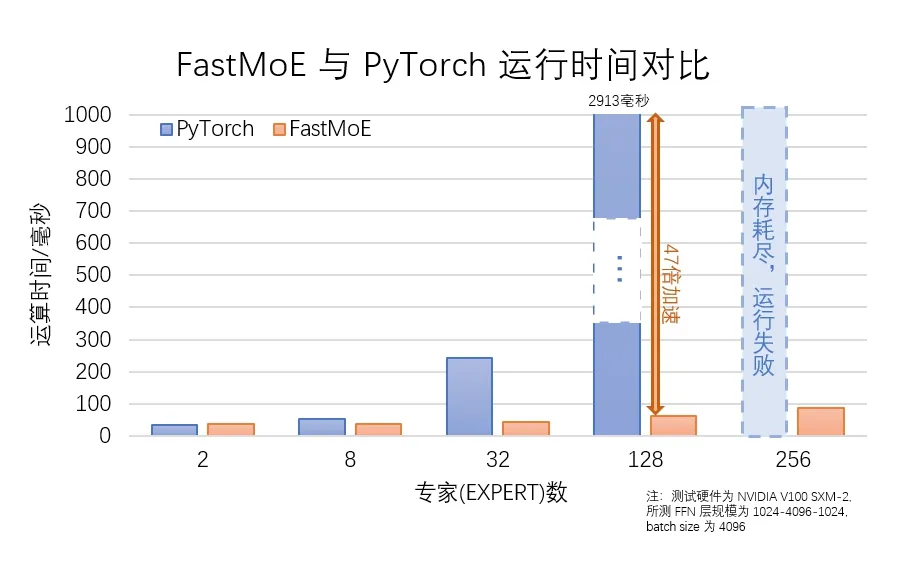
北京智源人工智能研究院(以下简称“智源研究院”)和清华大学日前联合发布首个支持PyTorch框架的高性能MoE系统:FastMoE 。
MoE(Mixture of Experts)是一个在神经网络中引入若干专家网络(Expert Network)的技术,也是Google最近发布的1.5万亿参数预训练模型Switch Transformer的核心技术。它对于预训练模型从亿级参数跨越到万亿级参数,起到了重要推动作用。然而由于其对Google分布式训练框架mesh-tensorflow和Google定制硬件TPU的依赖,给学术界和开源社区的使用与研究带来了不便。据悉,FastMoE系统具有易用性强、灵活性好、训练速度快的优势,打破行业限制,可在不同规模的计算机或集群上支持研究者探索不同的MoE模型在不同领域的应用。相比直接使用PyTorch实现的版本,提速47倍。
FastMoE是智源研究院于2020年发起的新型超大规模预训练模型研发项目“悟道”的最新成果,由“悟道文汇”(面向认知的超大规模新型预训练模型)和“悟道文溯”(超大规模蛋白质序列预训练模型)两个研究小组联合完成。
(玑微)
微纳操作机器人肿瘤探测研究获突破
沈阳自动化所微纳米课题组,长期以来在信息科学与生命科学交叉融合前沿微纳机器人系统及其生物医学应用方面,特别是在多尺度肿瘤机械特性探测方面,开展了连续性和系统性的理论及实际应用研究工作,部分研究成果发表在《Science Advances》、《Nature Communications》等刊物上。近日其微纳机器人技术肿瘤探测研究成果获得突破,并在国外著名期刊《Acta Pharmacologica Sinica》以封面文章形式发表。
论文系统总结了基于原子力显微镜(AFM)的肿瘤转移过程中单细胞及微环境机械特性的探测与表征,并展望其存在的挑战及未来发展。肿瘤转移是导致癌症患者死亡的最主要原因(约90%)。在肿瘤转移过程中,癌细胞及其微环境发生化学特性的改变,并伴随着显著的物理过程及物理特性变化,如:癌细胞通过改变自身机械特性(如变形能力)以利于穿过转移过程中的各种物理障碍(如细胞外基质、血管壁);在血液循环过程中,癌细胞通过与血小板结合以逃避体内免疫系统的识别与攻击;癌细胞通过外泌体传递信息,促使转移部位微环境发生改变,以适应癌细胞生存和增殖的需要等。AFM能够揭示肿瘤转移过程中单个细胞机械特性的变化,并可对肿瘤转移过程中涉及的多种微环境因素(如外泌体、细胞外基质等)进行有效探测,为肿瘤研究提供了新的技术方法。
该研究工作得到国家自然科学基金委员会,中科院和机器人学国家重点实验室的支持。
(玑微)
磁性球体机器人可协作移动

香港中文大学的研究团队最近研发一种名为“FreeBOT”的球形机器人,其形状比垒球略大,可以在平面上滚动并在墙壁和斜坡上攀爬。多个球形机器人还能够彼此粘在一起,协作完成各种形状和动作。
FreeBOT是模块化结构,内部装有磁铁,由两部分组成:磁铁球形壳体和内部驱动机构。内部驱动机构有两个轮子,由两个直流电动机通过齿轮驱动;内轮在球壳中的位置通过电机控制。
FreeBOT可以独立在平面上滚动,强大的内部磁体还允许其在铁磁壁上垂直移动。该机器人内部磁铁很小,但是会产生很强的外部磁场。研究人员利用磁场技术,将机器人吸引在一起组成机器人团队,由于几乎整个模块都是接触点,所以集成在一起的机器人可以组成各种形状并移动。
(玑微)
