基于无人机载多光谱相机的海面溢油分类方法研究
2021-08-17尹松林崔子浩田兆硕
王 畅,尹松林,高 阳,崔子浩,田兆硕,2*
(1.哈尔滨工业大学(威海)船海光电装备研究所,山东 威海 264209; 2.山东船舶技术研究院,山东 威海 264209)
海面溢油是海洋中危害最大,也是最为常见的污染物。石油在海面迅速散开后,形成油膜,海面上的油膜会对海水吸收氧气造成极大影响,不仅严重危害海洋中植物的光合作用,还导致海洋中的浮游生物缺少氧气而大量死亡[1-2]。
多光谱遥感技术是一种被动光学探测技术,它能够同时获得目标的光谱特征及其空间信息,可以更加精确地识别海面溢油污染[3]。其图谱合一的特性,可以更直观地将油污在图像上标记出来,故多光谱遥感技术十分适用于海面溢油探测。卫星遥感具有全天候监测、海面探测范围广等优势,但卫星遥感受气象条件影响较大,空间分辨率和时间分辨率不高,影响它在海洋溢油应用中的监测精度[4]。无人机(Unmanned Aerial Vehicle, UAV)作为新型遥感监测平台,能够搭载多种传感器设备,具有灵活性、机动性等特点。当发生海洋溢油事故时,无人机可以迅速到达溢油污染区域,记录溢油位置和扩散情况[5]。与其他机载遥感技术相比,多旋翼无人机具有优良的机动性与灵活性,能搭载多光谱相机,进行遥感溢油分布情况探测[6]。
遥感图像分类是遥感应用系统中的关键步骤,快速、高精度的遥感图像分类算法是实现各种实际应用的前提,可分为监督分类[7]和非监督分类。目前,最大似然法[8-10]、支持向量机[11-13]、混合像元分类[14]、多项式逻辑回归[15-16]以及决策树分类等方法已经在溢油污染探测方面有了较为广泛的应用。基于以上描述,本研究主要研制了无人机载多光谱油污探测系统,通过室外模拟实验分析最大似然法、最小距离法和光谱角填图法3种分类方法提取溢油信息效果,并将最佳分类方法应用于实际港口实验区多光谱相机数据的溢油信息提取,从而证明无人机载多光谱相机可应用于海面溢油分类,具有实际应用价值。
1 油污探测系统设计
无人机载多光谱相机系统大体可分为两部分,无人机载部分和地面站部分,通过无线和电台进行数据传输。无人机载部分主要由多光谱相机(CMOSIS CMV2000)、微型电脑、差分GPS移动站及其电台、路由器、信号放大器以及各部分供电所需的电池等组成。地面站部分主要有差分GPS基准站及其电台、无线(Access Point,AP)接收机、电脑等构成。多光谱相机主要性能参数如表1所示。图1为无人机载多光谱相机油污探测整体系统结构示意图。

表1 CMOSIS CMV2000传感器主要技术参数

图1 系统结构示意图
本实验使用的是六旋翼无人机,多光谱相机固定在机身的碳纤维圆杆上,实时动态(Real-time Kinematic, RTK)GPS天线部分安装于无人机上方,电台、微型电脑、无线路由、信号放大器、供电电源等设备安装于无人机起落架上,如图2所示。本实验使用差分GPS进行定位及导航。通过地面的飞控软件,控制无人机在溢油区域上空进行飞行作业。机载微型计算机通过Wi-Fi连接无线路由器,信号经过放大器进行放大,并与地面的AP接收机进行无线局域网的构建。通过计算机的远程桌面打开HSImager软件控制多光谱相机,调节曝光时间与采集速度,并采集多光谱图像。图像经过后续的分类处理将油污在图像中标记出来,形成伪彩色的分类图像。

图2 无人机载多光谱相机油污探测系统实物图
2 结果与讨论
2.1 水面图像分类实验
利用多光谱油污探测系统进行了室外模拟实验,实验时环境温度为-5 ℃左右。使用1.60 m×0.70 m×0.50 m(长×宽×高)的水池,并装有0.40 m高的清水,水池表面结有部分浮冰。在水面滴入美孚46号润滑油,油在水面扩散过程中形成油膜,此时水面有不同厚度的油膜和浮冰。将多光谱相机固定在距离水面3 m高的支架上,垂直向下对水池进行成像,获得有水、冰、油膜的多光谱图像。实验获得的多光谱图像如图3所示。
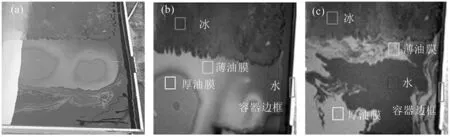
图3 水面溢油实验图像
图3(a)为水面溢油实验时的数码照片;图3(b)为滴入润滑油后(0 min)的RGB多光谱图像;图3(c)为油在水面扩散10 min后的RGB多光谱图像。其中R部分为第18波段,波长为917.85 nm;G部分为第12波段,波长为756.19 nm;B部分为第6波段,波长为792.80 nm。由于图像可以明显区分冰、水及不同厚度的油膜,所以使用遥感图像处理平台(The Environment for Visualizing Images,ENVI)对多光谱图像进行监督分类,首先在两幅多光谱图像中用不同颜色选取感兴趣区域作为样本,一共定义6类样本,分别为冰、水、薄油膜、厚油膜、相对厚油膜、容器边框。然后使用ENVI中的训练样本可分离工具计算任意类别间的统计距离。每个感兴趣区域互相组合并通过Jeffries-Matusita距离(两个样本间的向量距离)和转换分离度算法进行计算,来衡量训练样本的可分离性。当分离性的值大于1.90时说明样本之间可分离性好,小于1.00时将两种样本划分为一类。此实验得到的水和冰的分离性为1.16,小于1.90,分离程度较差,其它样本两两分离程度较好,均大于1.90。本研究使用所有25个波段的中心波长值,通过统计特征的方法进行3种分类的运算处理。最后分别利用最大似然法、最小距离法、光谱角填图法3种方法对图3(b)、(c)进行监督分类,实验分类结果如图4所示。
图4(a)、(d)分别为溢油实验(0 min)和溢油实验(10 min)的最大似然法分类结果图,设置似然度阈值为0.50,数据比例系数为255。对原始图像进行分类,并对分类结果进行评价,如表2所示。根据混淆矩阵计算,前者总分类精度为51.90%,Kappa系数为0.47;后者总分类精度为90.71%,Kappa系数为0.88,分类方法较好提取目标,但由于水和冰相似度较高,会将冰误判为水。图4(b)、(e)分别为溢油实验(0 min)和溢油实验(10 min)的最小距离法分类结果图,设置所有类别标准差阈值为4,不设最大距离误差,其前者总分类精度为42.40%,Kappa系数为0.36;后者总分类精度为36.17%,Kappa系数为0.25。从整体提取结果上来看,将水误判成冰的分类结果较为严重,将油水混合区的薄油膜层误判为冰存在过分割的缺陷。图4(c)、(f)分别为溢油实验(0 min)和溢油实验(10 min)的光谱角填图法分类结果图,其前者总分类精度为85.09%,Kappa系数为0.82。各个类别的分类精度也相对均匀,其中厚油膜的分类精度为76.00%,薄油膜的分类精度为92.29%,相对厚油膜的精度为77.09%,水体的分类精度达到86.11%,冰的分类精度为87.06%;后者无论是在油水混合层还是冰层,都有较好的提取结果,优于其它两种方法,其总分类精度为92.37%,Kappa系数为0.90。光谱角填图法在应用于边缘信息模糊的油水混合区域时,能较好的区分溢油和海水。

表2 实验分类精度评价

图4 实验分类结果图
综上所述,根据总分类精度和Kappa系数作对比,最大似然法的分类精度明显高于最小距离法,但在分类速度上会略小于最小距离法。与最小距离法和最大似然法的分类结果相比,光谱角填图分类方法的分类结果明显好于其他两种方法,且精度较高,故海面实验使用光谱角填图分类方法对多光谱图像进行处理来获得溢油区域的信息。
2.2 海面油污探测实验
使用机载多光谱探测系统进行实际海面油污探测实验,实验地点选择在山东威海的一个小型渔港(图5),船附近有少量油污溢出,无人机飞到溢油目标上方进行多光谱成像。

图5 实验溢油区域实物图
通过地面站设计飞行路线,探测高度为20 m,探测面积为22 m2。通过局域网打开软件控制多光谱相机,设置相机采集速率为10 fps,曝光时间为50 ms,并对溢油区域进行拍摄。将拍摄到的原始多光谱图像进行保存(图6)。将原始图像通过目视解译和当时的实地观察得到获取船、溢油、水沙滩的真实感兴趣区(图7)。使用光谱角填图分类法对其进行分类,分类结果如图8所示。使用ENVI中混淆矩阵(Confusion Matrix)工具把真实感兴趣区的像元与最终分类结果相匹配建立混淆矩阵,并根据混淆矩阵对光谱角填图算法进行精度评价,如表3所示。各个部分分类精度都相对较高,错分误差整体低于30.00%,除船的漏分误差相对较高外,其它都在允许范围内,溢油图像区域制图精度达到99.57%,各个部分的用户精度都达到70.00%以上,总分类精度为80.98%,Kappa系数为0.74。光谱角填图分类方法整体精度高,适合该系统的溢油分类方法。

图6 海上溢油的原始图像
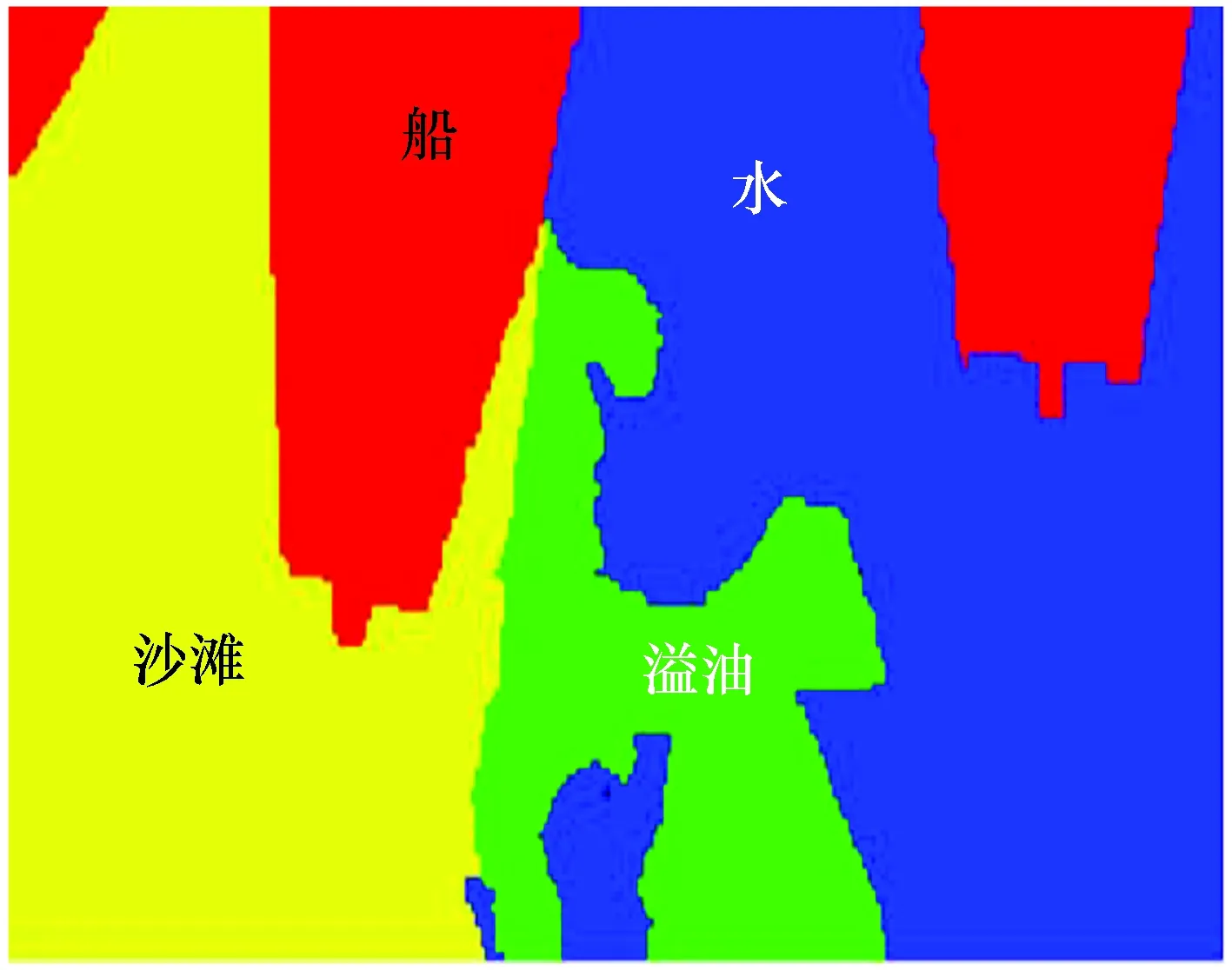
图7 海上溢油的真实数据图
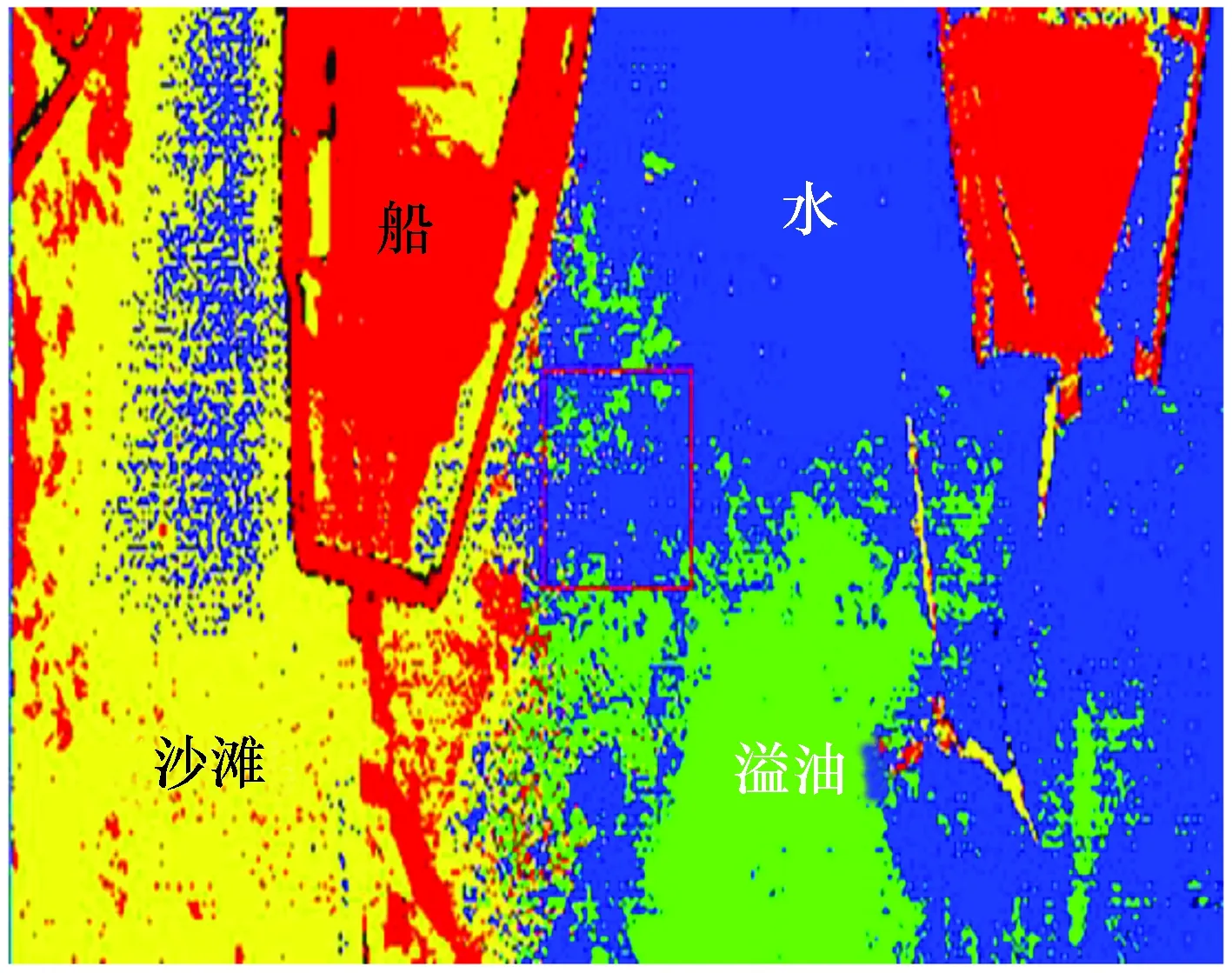
图8 海上溢油的光谱角填图分类法结果图
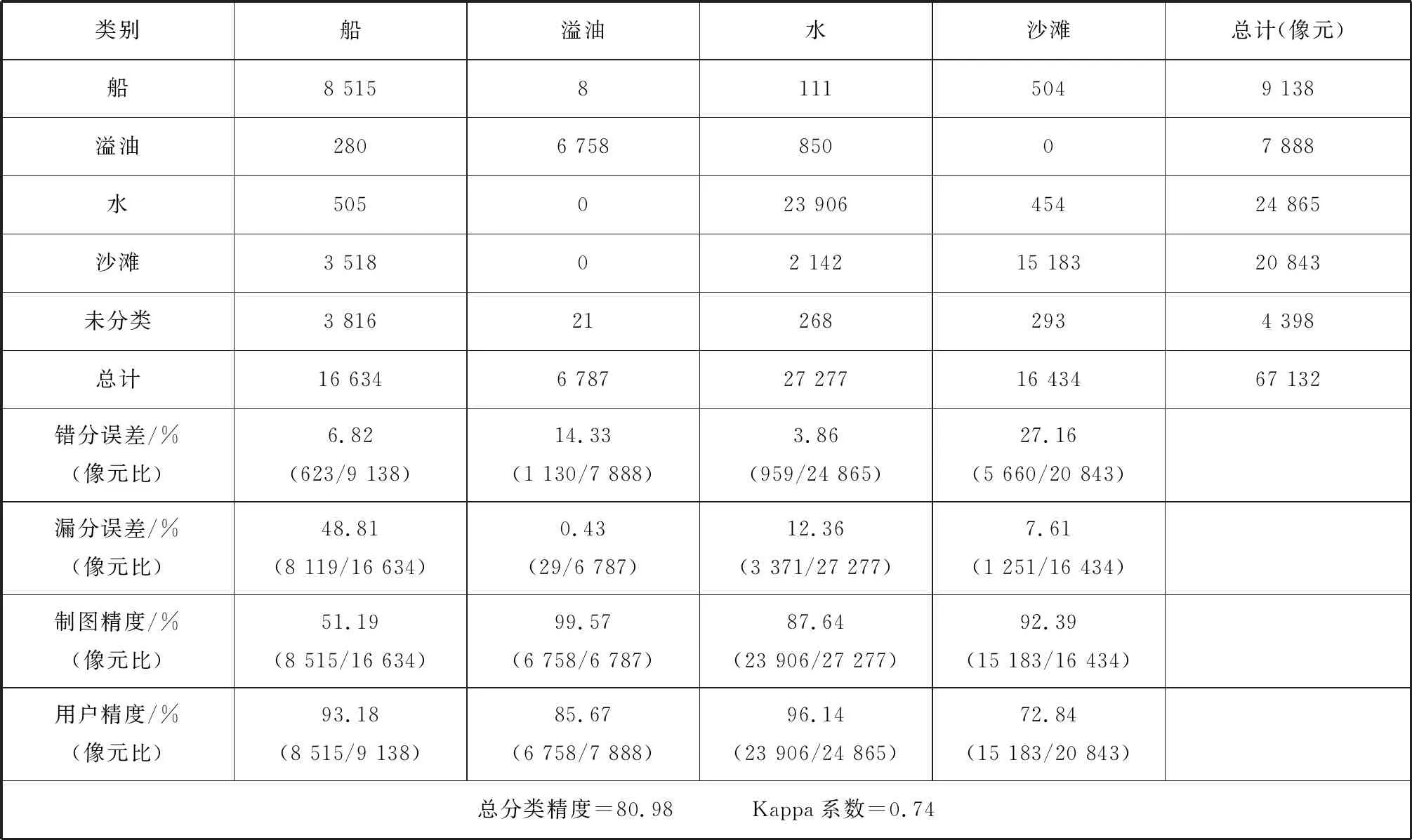
表3 海上溢油分类混淆矩阵表
3 结论
基于多光谱遥感技术,本研究设计了无人机载多光谱油污探测系统,并利用最大似然法、最小距离法以及光谱角填图法对多光谱图像进行分类,通过混淆矩阵对3种方法进行精度评价。实验表明,光谱角填图法分类效果最好,可将水、冰、薄油膜、厚油膜进行区分,总分类精度达到90.00%以上,明显高于其他两种方法。海面溢油探测实验中,利用自研的无人机载多光谱系统对溢油区域进行探测,并基于光谱角填图法对多光谱图像进行分类,验证该系统的溢油探测功能。研究表明,无人机搭载多光谱相机具有实时性、速度快的优点,可抵近或飞入溢油危险区,高效地获得水面溢油信息,可有效地弥补卫星平台的不足,实现对水面溢油污染情况的监测,并为相关人员清理溢油提供指导作用,将在海洋溢油遥感探测中发挥巨大作用。
