应变传感器动态特性激光绝对法冲击校准装置
2021-08-17王伟伟
金 冉 吕 翔 陈 伟 王伟伟
(贵州航天计量测试技术研究所,贵州贵阳 550009)
1 引 言
随着科技的发展,应变传感器在航空航天领域、在工程建设领域和仪器仪表领域都有大量的应用[1,2]。目前,应变传感器一般采用等强度悬臂梁[3]或振弦式应变传感器校准装置进行校准[4],这两类校准装置只能校准应变传感器的灵敏度、线性度、重复性等静态指标,经静态校准的应变传感器可用在应变量随时间变化不明显的场合,若测量快速变化的应变量,则其准确度不能保证。
霍普金森杆和激光测速仪在动态力学参数校准方面有广泛的应用。北京长城计量测试技术研究所利用激光测速仪对冲击传感器进行校准[5],李玉龙、郭伟国等利用霍普金森杆和应变片对高g值加速度传感器进行校准[6],王燕、范锦彪等学者应用霍普金森杆和激光测速仪对高g值加速度传感器进行校准[7,8]。霍普金森杆和激光测速仪在应变传感器动态特性校准方面的应用尚无文献报道。
本文提出一种激光绝对法冲击校准装置,对应变传感器的动态特性进行校准。该装置采用霍普金森杆作为动态应变发生装置,用衍射光栅和激光测速仪对动态应变量进行测量,用Hilbert变换技术[9]对测量数据进行计算,可完成对应变传感器动态特性的校准。
2 校准装置原理
2.1 激光测速仪原理
系统使用的激光测速仪采用双光路双散射的外差检测光路模式,光路结构如图1所示。激光测速仪采用分束比为1:1的分束镜,将激光器射出的光分成等强的两束,其中一束通过反射镜1与另一束形成平行光,通过凸透镜1在其焦点形成聚焦,若聚焦点正位于衍射光栅的表面,则两束入射光线发生衍射,且两束入射光线形成的衍射光线重合,选取一束衍射光线,通过透镜4汇聚,反射镜2改变光束方向,再通过凸透镜2汇聚后在光电探测器APD感光面上发生干涉,光电探测器将光信号转换成电信号。若光栅移动,则光电探测器输出多普勒频移信号,用高速数据采集分析系统对多普勒频移信号进行采样,并对采样数据进行计算,可得到霍普金森杆表面质点运动的速度信号波形和霍普金森杆上产生的应变波形。
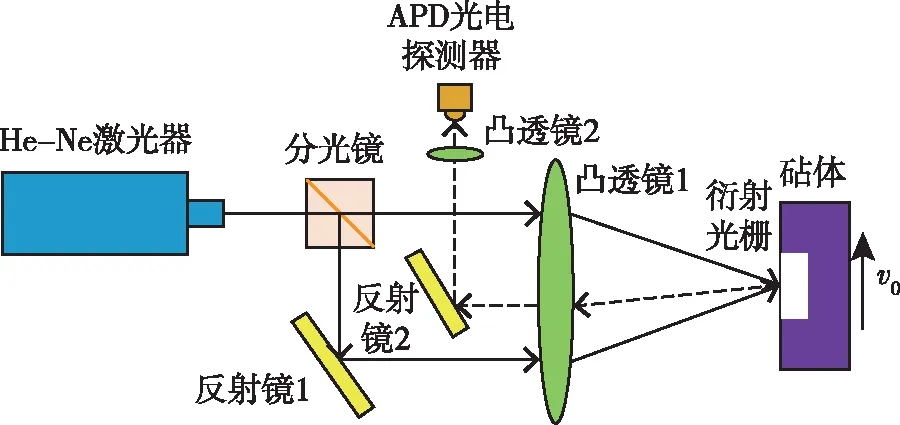
图1 激光测速仪光路结构图
由文献[3]可知,光栅运动速度v与多普勒频移fD之间的关系为
(1)
式中:θ——两束入射光线之间的夹角;λ——入射光的波长。
光栅运动时,每一束衍射光均发生多普勒频移,根据激光干涉理论与光栅方程,有
(2)
式中:m1,m2——两路干涉光束所对应的光栅衍射级。
由式(1)和式(2)可得
(3)
测量时调整激光测速仪,选取相应衍射光斑,即可确定m1与m2的值,通过对激光测速仪输出信号进行Hilbert变换,得到信号的实时相位φ(t),根据式
(4)
计算衍射光产生的多普勒频移,将式(4)代入式(3),可以得到光栅运动的速度变化波形。
2.2 校准装置原理
应变传感器动态特性激光绝对法冲击校准装置主要由空气炮、发射管、子弹、霍普金森杆、衍射光栅、激光测速仪、缓冲器、数字示波器和数据分析仪组成。校准装置原理如图2所示。
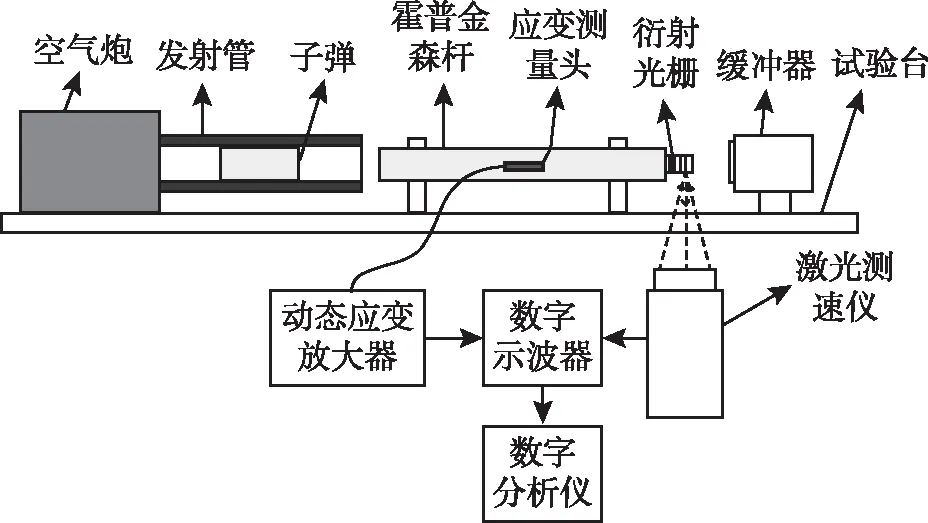
图2 应变传感器动态特性校准装置原理图
空气炮释放高压气体,推动子弹加速射出发射管,子弹撞击霍普金森杆后,产生的一维应力波在霍普金森杆中传播,产生的应变ε(t)与霍普金森杆中质点传播的速度v(t)成正比为
v(t)=2ε(t)c0
(5)
式中:v(t)——霍普金森杆中质点运动的瞬时速度;ε(t)——霍普金森杆端面的瞬时应变;c0——一维应力波在霍普金森杆中的传播速度。
衍射光栅安装于霍普金森杆端面,激光多普勒测速仪将霍普金森杆质点运动速度v(t)转化为模拟电信号,数字示波器采集激光多普勒测速仪的输出信号并保存,数据分析仪对保存数据进行分析,得到霍普金森杆动态应变的波形。
校准前,根据预计测试脉冲持续时间选择相应长度的子弹,子弹长度与脉冲持续时间符合式(6)
τ=2L/c0
(6)
式中:τ——动态应变波形的脉冲持续时间;L——子弹长度。
本系统中采用的光栅栅距为1/150mm,有效长度10mm,测量光选取±1级衍射光,激光测速仪光电探测器的带宽为100MHz,光源波长为632.8nm,光栅移动时,激光测速仪输出电压信号的峰值为100mV。系统采用的霍普金森杆直径为20mm、长度为6m,子弹的直径与Hopkinson杆相同,其长度为2.5m,霍普金森杆动态应变激励装置整体长度为12m,空气炮的气源为高压氮气,通过减压阀进行降压后进入空气炮,发射气压不大于1.5MPa。
3 校准软件设计
对于包含多个频率成分的窄脉冲动态应变信号,Hilbert变换法可以保存信号的时间信息,较FFT法有明显的优势,数据处理算法主要先对离散数据进行Hilbert变换,得到多普勒信号的相位,对相位信息进行微分后得到多普勒频率,再根据式对相位信息进行处理得到多普勒频移值,并式分析得到速度变化波形,最后根据式和式计算霍普金森杆表面的应变量与脉冲持续时间。激光测速仪测得数据处理流程如图3所示。

图3 激光测速仪测得数据处理流程图
应用LabVIEW软件平台对动态应变校准软件进行编写,LabVIEW软件在数据采集方面有明显优势,在数据处理方面,复杂的图形模块不易阅读和调试,但其内部集成了文本语言指令,且兼容MATLAB语言,故程序的数据采集部分用LabVIEW自带图形化语言模块进行编写,数据处理部分用软件自带的mathscript文本语言进行编写。动态应变校准软件界面如图4所示。

图4 动态应变校准软件界面图
4 校准试验结果
进行试验时,选择120Ω电阻应变片,配套东华测试生产的DH3840动态应变放大器作为被校对象,采用长2.5m的子弹,改变空气炮发射气压,对该动态应变测量装置进行了5次校准,校准数据见表1。从表1可知,动态应变幅值的值示值误差最大为-1.31%,脉冲持续时间最大示值误差为-6.37%。
图5给出了第3次校准过程中,测得的激光测速仪输出的多普勒信号波形、对多普勒信号进行Hilbert变换和微分计算后得到的应变波形、经平滑滤波处理的应变波形与应变传感器测得的霍普金森杆应变激励波形。如图5(b)所示,直接计算得到的应变波形含有大量的噪声,无法进行测量,故采用平滑滤波法对含有噪声的波形进行降噪处理,降噪处理后的应变波形如图5(c)所示。比较图5(c)与图5(d),激光测速仪测得波形与应变传感器测得波形的幅值基本一致,波形近似,但应变传感器测得波形的上升沿较为平缓,原因是动态应变放大器滤波器的带宽设置的过小,输出波形损失了高频成分,导致最终脉冲时间测量值偏小。

表1 动态应变冲击校准试验结果Tab.1 Result of Dynamic strain shock calibration test序号校准值测量值示值误差动态应变幅值/με脉冲持续时间/ms动态应变幅值/με脉冲持续时间/ms动态应变幅值示值误差/%脉冲持续时间示值误差/%1469.540.983463.390.924-1.31-6.002454.080.987450.320.926-0.83-6.183617.180.986612.070.925-0.83-6.194613.580.987609.210.925-0.71-6.285976.520.989971.060.926-0.56-6.37

图5 动态应变信号测量波形图
5 不确定度分析
5.1 动态应变幅值测量不确定度评定
动态应变幅值测量不确定度的来源主要包括:激光测速仪引入的标准不确定度分量U1.1;霍普金森杆应变损耗引入的标准不确定度分量U1.2;数据采集分析仪引入的标准不确定度分量U1.3;动态应变传感器安装引入的不确定度分量U1.4。动态应变幅值的标准不确定度来源及对应的数值见表2。
根据表2所示的不确定度来源及数值,计算合成标准不确定度为
取包含因子k=2,则扩展不确定度为

Urel=k×U1c=2.24%
取动态应变幅值测量不确定度为
Urel=3%
5.2 动态应变脉冲持续时间测量不确定度评定
脉冲持续时间的测量不确定度来源主要包括:激光测速仪引入的标准不确定度分量U2.1;动态应变传感器安装引入的标准不确定度分量U2.2;被校动态应传感器测量仪分辨力引入的标准不确定度分量U2.3。动态应变脉冲持续时间的标准不确定度来源及对应的数值见表3。
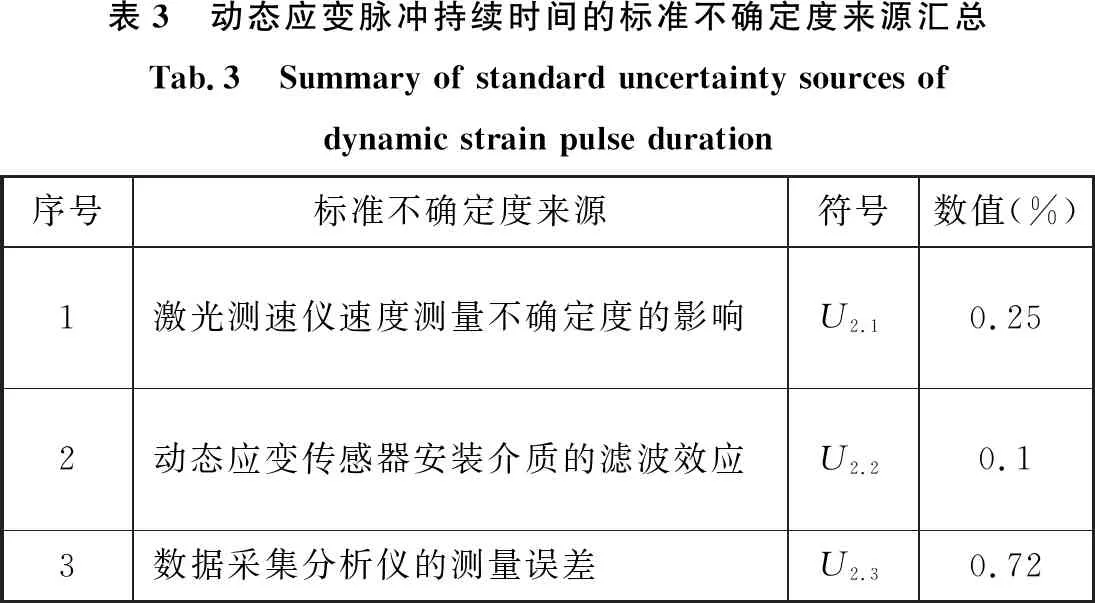
表3 动态应变脉冲持续时间的标准不确定度来源汇总Tab.3 Summary of standard uncertainty sources of dynamic strain pulse duration序号标准不确定度来源符号数值(%)1激光测速仪速度测量不确定度的影响U2.10.252动态应变传感器安装介质的滤波效应U2.20.13数据采集分析仪的测量误差U2.30.72
根据表3所示的不确定度来源及对应的数值,合成标准不确定度为
取包含因子k=2,则扩展不确定度为
Urel=k×U2c=1.54%
取动态应变脉冲持续时间测量不确定度为
Urel=1.6%
6 结束语
本文提出一种应变传感器动态特性激光绝对法冲击校准技术,利用霍普金森杆作为动态应变激励装置,用激光测速仪作为应变测量装置,通过设计算法和编制动态应变校准软件,对数据进行采集和计算,可完成对应变传感器动态特性的校准。应用该技术,可对应变片式应变传感器和光纤应变传感器的动态特性进行校准,保证了工程应用中动态应变参数测试的准确度。
