基于生物力学的自走式喷雾机驾驶员下肢姿势舒适性研究*
2021-08-13宋强白新瑀高喜银王贺杨欣
宋强,白新瑀,高喜银,王贺,杨欣
(河北农业大学机电工程学院,河北保定,071001)
0 引言
自走式喷杆喷雾机是一种将喷头装在横向喷杆或竖立喷杆上进行喷雾施肥的植保机械[1]。随着我国农业机械化的快速发展,自走式喷雾机得到了多数人的认可和使用[2]。在工作中,人、喷雾机、工作环境构成了复杂的人机关系,人是最重要的因素,同时负责驾驶、喷药控制等工作,驾驶姿势舒适性是关系到驾驶员的疲劳强度、工作负载、身体健康甚至能否安全稳定驾驶车辆的重要内容,因此对驾驶姿势舒适性的研究就显得尤为重要[3],这样不仅有益于改善喷雾机的驾驶舒适度,而且还可以深层次的探究喷雾机驾驶员职业性疾病产生的主要原因,并从根本上预防驾驶员腰背的疲劳程度,降低职业性疾病的发病率。
在早期研究中,国内外学者主要通过计算驾驶员的姿势角度对驾驶姿势的舒适性进行研究。Rebiffé[4]通过科学的建模来模拟驾驶姿势,计算并推理出驾驶员合适的人体关节角度;Porter等[5]在驾驶模拟平台上,测量了驾驶员的舒适驾驶姿势,并对舒适驾驶姿势下的关节角度进行了范围推荐;Park等[6]用问卷调查定性方法对驾驶姿势进行了评价,得到了韩国人的舒适驾驶姿势下的关节角度,但结果与之前的研究差别很大;姚建辉[7]通过考虑人体肌肉群的叠加作业,并计算出关节部分的不舒适度,建立了评价不舒适性的模型;马佳等[8]还提出符合中国人体特征的驾驶姿势舒适性的关节角度范围;李冉儿[9]基于驾驶姿势对操作舒适性研究,最终依据参数重新对驾驶室进行优化设计。虽然驾驶员关节角度范围对驾驶姿势舒适性评价的初步研究对现代的评价体系有了一定的参考作用,但是这种评价方法的不足越来越引起学者的重视,在评价过程中建立的人体模型过于简化[10],不能完全反映真实的关节受力情况,因此也更难以解释例如驾驶员的身体疲劳程度、驾驶过程中的舒适性机理以及导致人体运动系统损伤等深层次问题。
近些年来,国内外的学者将生物力学的理论应用到驾驶舒适性的研究中,并形成较多研究成果。Bubb等[11]对舒适驾驶与力的关系进行了研究,指出舒适驾驶姿势与关节力是呈线性关系的,并推断出肌肉行为会影响驾驶舒适性;Hirao等[12]采用生物力学分析和主观评价的方法对驾驶姿势进行分析优化,分为静态和动态两种驾驶情况,结果表明优化后的驾驶姿势能有效地降低疲劳程度;腾俊章[13]提出新的虚拟人运动的合成方法,并基于关节力矩对驾驶员的操作舒适性进行了评价研究;崔文诗[14]研究了基于人体关节负载的驾驶姿势的舒适性,并优化了某车辆的驾驶室布局。
针对生物力学在驾驶舒适性的研究基础,本文对自走式喷雾机驾驶姿势舒适性进行了研究,主要是对驾驶员下肢姿势进行仿真,通过计算驾驶员在踩下—松开离合踏板时对其髋关节、踝关节和膝关节的力矩大小来分析驾驶姿势的舒适性。
1 驾驶姿势预测和测量
1.1 喷雾机驾驶仿真平台创建
喷雾机驾驶室的座椅、踏板的布置尺寸对驾驶姿势的影响最大,本次研究选取踏板的垂直高度PH30,座椅高度H30为喷雾机驾驶室仿真选取的主要参数[15],其自走式喷雾机驾驶室结构图和平面参数示意图如图1所示。
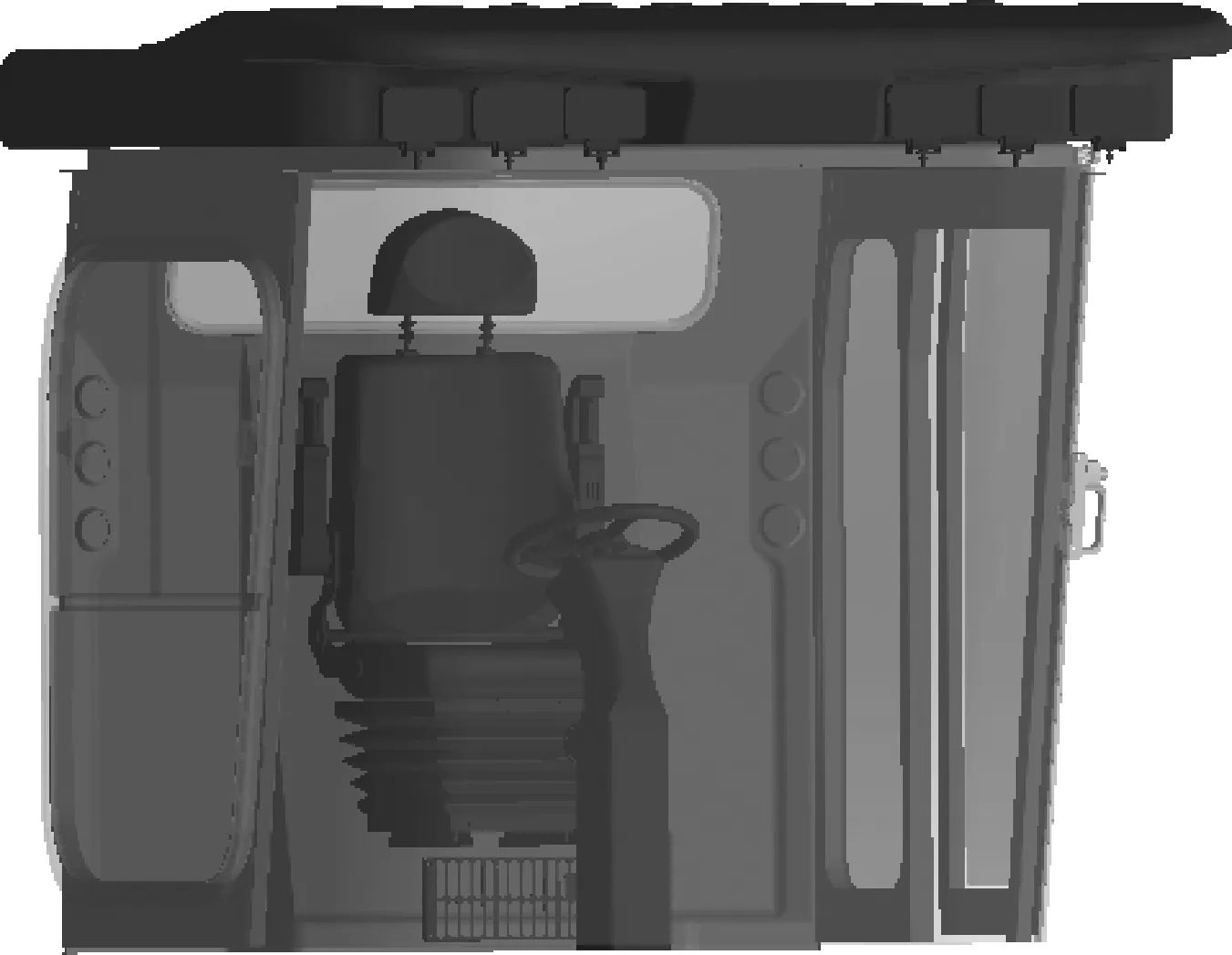
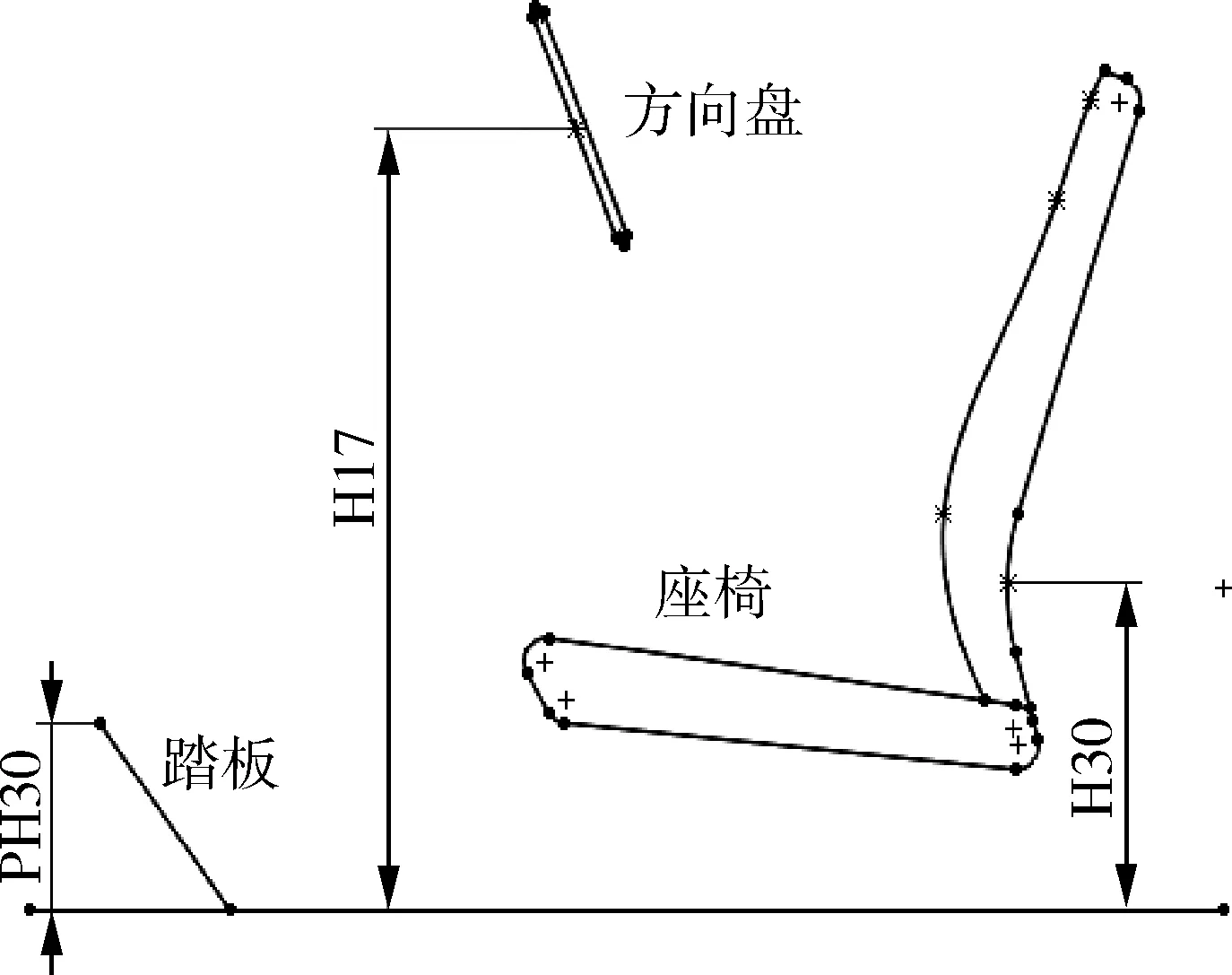
图1 喷雾机驾驶室结构图和平台参数示意图Fig. 1 Schematic diagram of sprayer cab structure andplatform parameters
在CATIA软件中装配好踏板、方向盘、座椅和驾驶室地板,组成喷雾机驾驶室的仿真试验平台,这是预测驾驶员驾驶姿势的前提条件[16]。首先需要对驾驶员的驾驶任务进行定义,以约束构建驾驶员人体的姿势,因为驾驶员在操作驾驶喷雾机时会执行换挡、加速、按喷雾按钮等一系列操作任务。对驾驶员模型的左右脚踵点、双手对方向盘的握姿和脚踏点进行了约束,RAMSIS会根据所约束的任务进行计算,这时就可以得到相应该喷雾机驾驶室布置环境和约束任务下驾驶员的驾驶姿势,如图2所示。
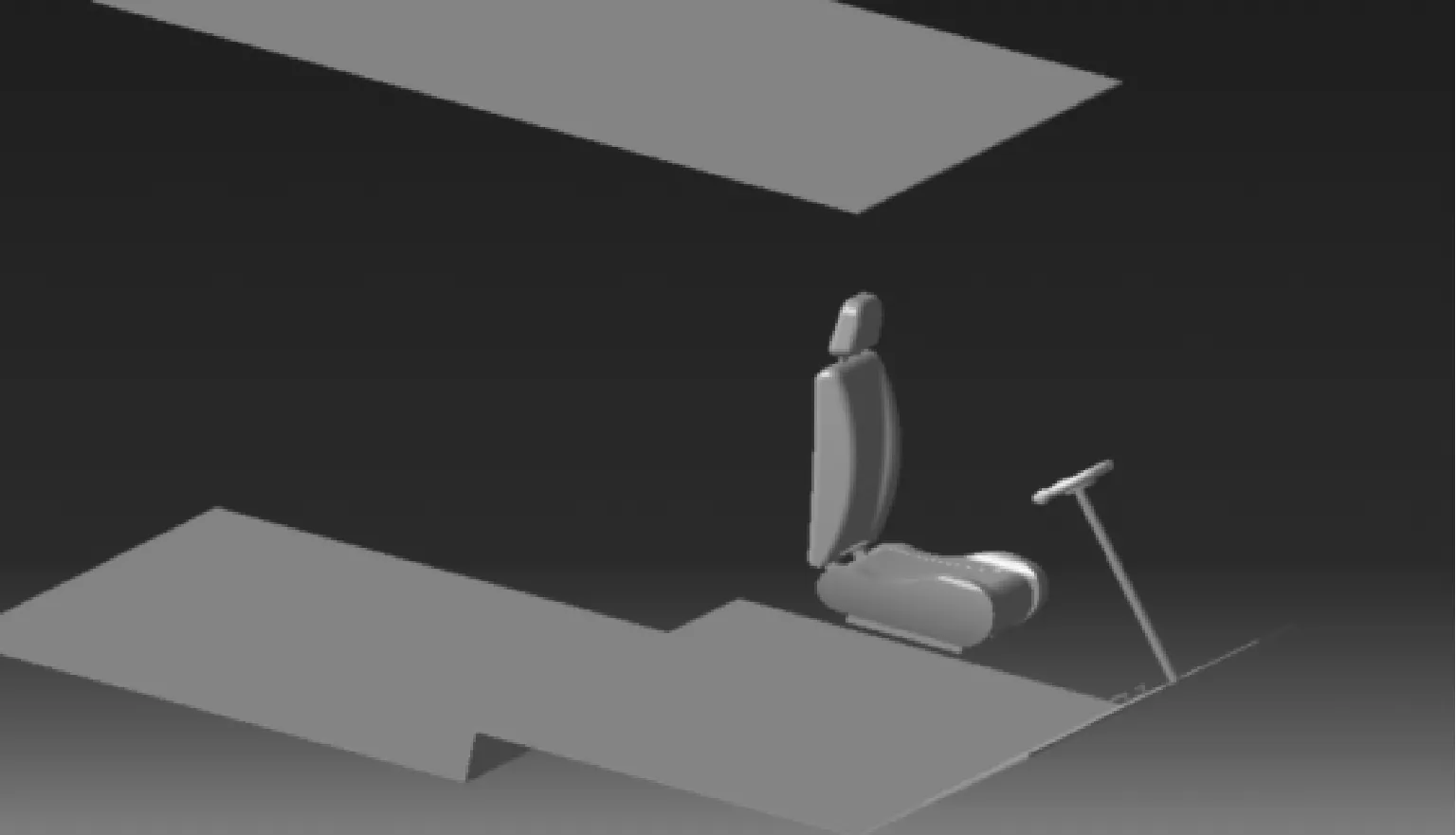
图2 喷雾机驾驶室侧平面示意图和仿真模型Fig. 2 Schematic diagram and simulation model ofsprayer cab side plane
1.2 驾驶员驾驶姿势的预测和测量
本文在评价过程中对RAMSIS仿真的人体模型尺寸不做大小修改,只用一个模型便可以做完评价研究,根据人体尺寸是呈正态分布的,因此选取第50百分位中国男性人体做仿真模型。在RAMSIS中需要新建一个驾驶员的人体模型,再进行模型的数据修改,软件会自动生成一个满足第50百分位男性要求的人体模型[17]。
借助RAMSIS软件中的姿势预测功能,以此得到第50百分位的中国男性人体模型的驾驶姿势,为了方便测量所研究的驾驶员下肢各个关节角度,选取并测量了其中3个对驾驶员下肢姿势影响最大的身体角度,分别是髋关节角A42、膝关节角A44、踝关节角A45。因此在对驾驶员关节角度进行研究时,单独分析踏板的布置参数对驾驶员下肢姿势舒适性的影响。
驾驶员在驾驶自走式喷雾机时,驾驶员的髋部和臀部的位置由喷雾机踏板和座椅的布置位置确定,并基本保持不变。驾驶员下肢的姿势与喷雾机踏板和座椅的设置参数有着密切关系,可以说完全由踏板的布置位置和座椅高度决定[18]。因此,在研究喷雾机驾驶室内部布置参数对驾驶员下肢姿势关节角度的影响时,可以直接分析喷雾机座椅高度和踏板布置参数对驾驶员下肢姿势的影响。
选取喷雾机座椅高度H30与踏板到驾驶室地板的垂直距离PH30这两个参数做为本次仿真的研究变量,通过实地考察测量和相关文献资料的查阅[19],喷雾机的座椅高度H30取240 mm、250 mm、260 mm、270 mm,踏板到驾驶室地板的垂直距离PH30的大小取100 mm、110 mm、120 mm、130 mm、140 mm,这两个参数随机组合起来共有20组布置方案,在RAMSIS里通过修改参数便可以预测得到每种布置方案下驾驶员的下肢驾驶姿势,并对所预测的姿势进行髋关节、膝关节和踝关节的关节角度测量,测量过程如图3所示,结果如表1所示。
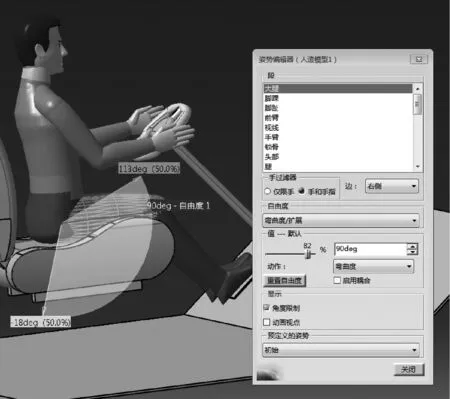
图3 驾驶员下肢关节角度测量图Fig. 3 Measurement diagram of lower limb jointangle of the driver

表1 预测驾驶姿势下驾驶员的下肢关节角度Tab. 1 Predicts the lower limb joint angle of thedriver in driving posture
1.3 单变量回归分析
从表1可以看出喷雾机座椅高度和踏板的垂直距离对驾驶员下肢关节角度有所影响,为了定量分析每个参数变量对驾驶员下肢姿势关节角度的影响,需要对每个布置参数与关节角度的关系进行回归分析,取喷雾机座椅高度为250 mm时分析踏板垂直距离的变化对驾驶员下肢关节角度的影响,取踏板的垂直距离为120 mm时分析座椅高度的变化对驾驶员下肢各关节角度影响,对表1的数据做单变量回归分析,其分析结果如图4~图6所示。
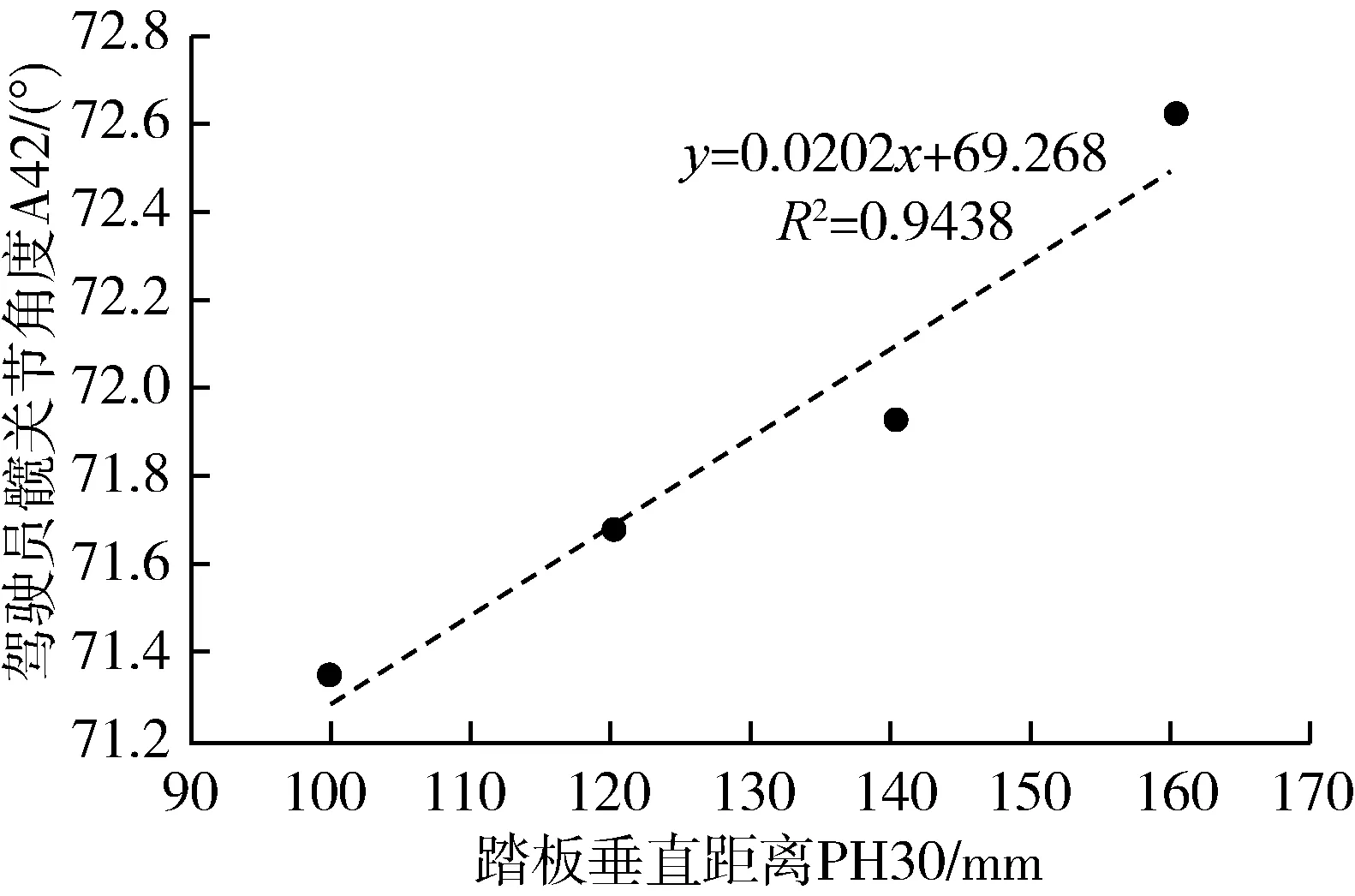
(a) PH30对髋关节角度影响
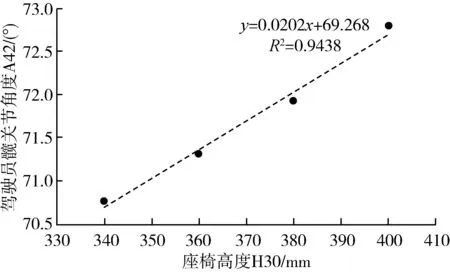
(b) H30对髋关节角度影响图4 布置参数对驾驶员髋关节的影响Fig. 4 Influence of layout parameters on driver’s hip joint
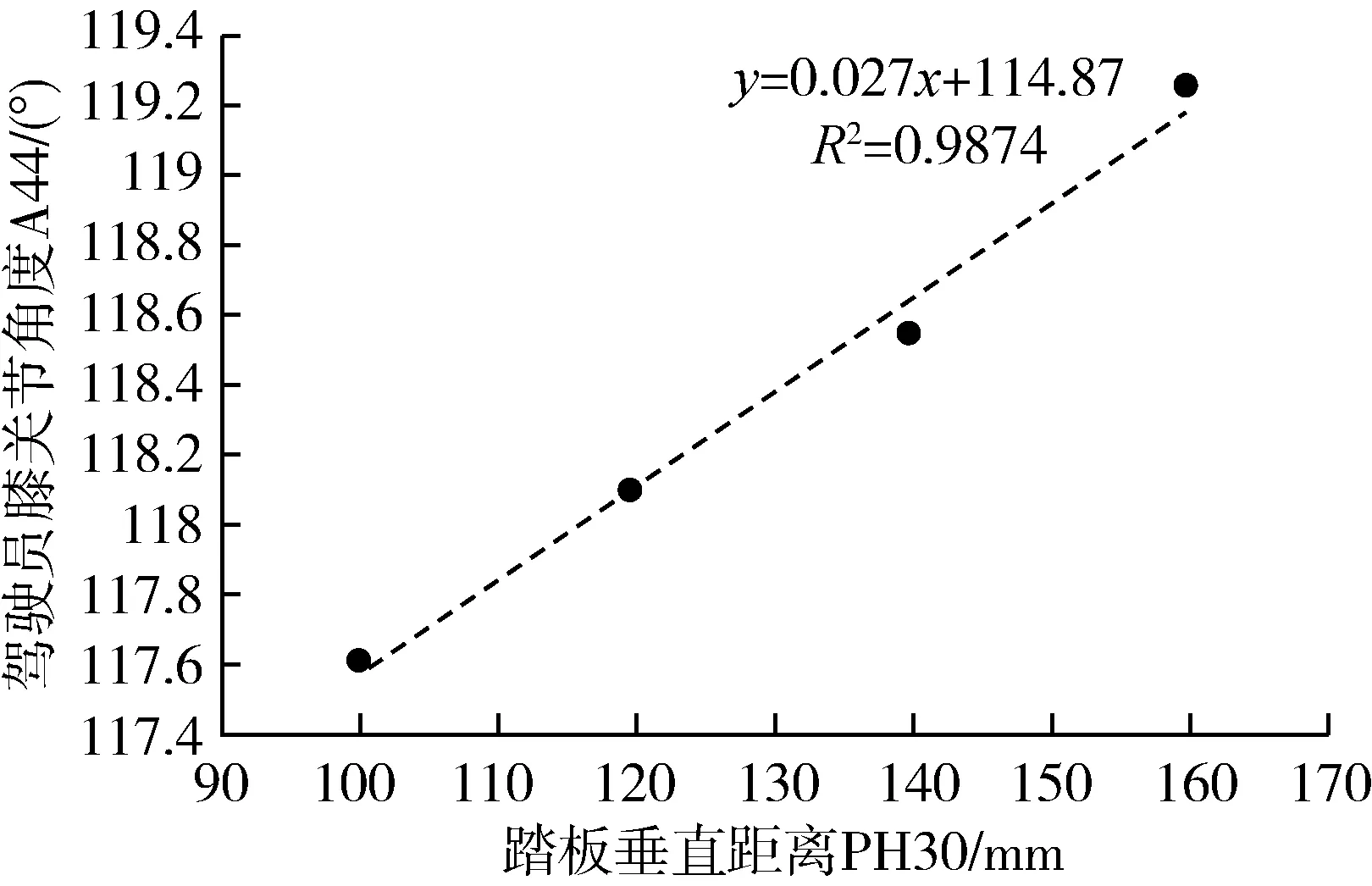
(a) PH30对膝关节角度影响
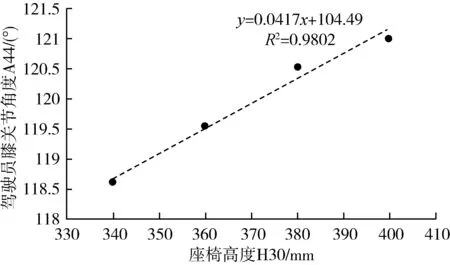
(b) H30对膝关节角度影响图5 布置参数对驾驶员膝关节的影响Fig. 5 Influence of layout parameters on driver’s knee joint
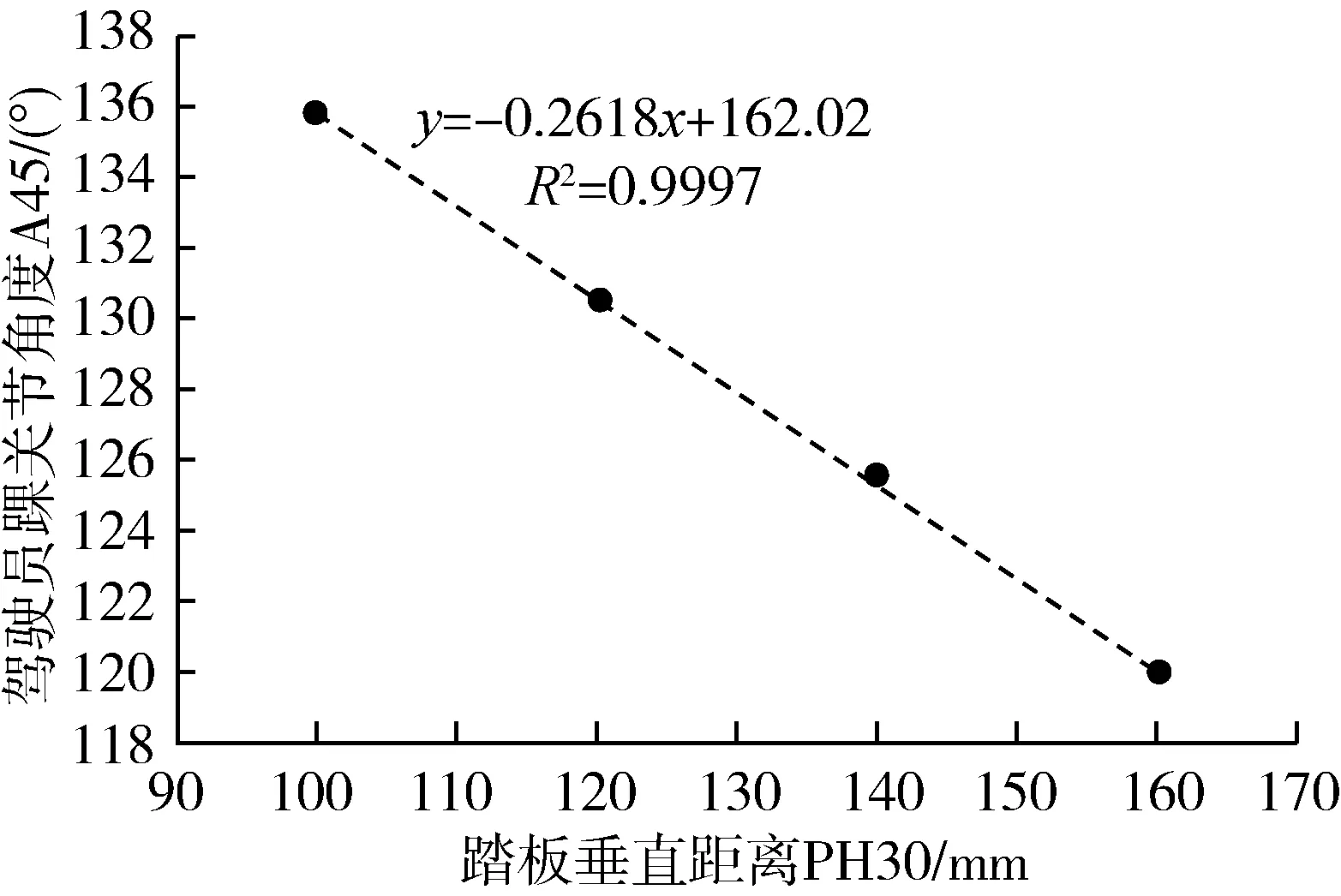
(a) PH30对踝关节角度影响
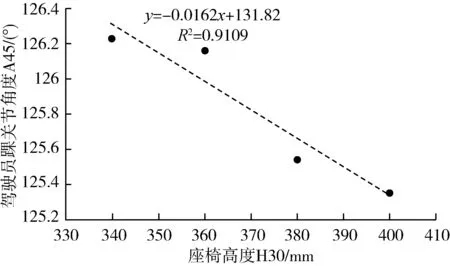
(b) H30对踝关节角度影响图6 布置参数对驾驶员踝关节的影响Fig. 6 Influence of layout parameters on thedriver’s ankle joint
从图4~图6可以看出,喷雾机的踏板距离PH30和座椅高度H30与驾驶员的主要下肢关节角度呈线性关系,且相关系数也都非常接近1,说明布局参数与下肢关节角度高度线性相关。其中踏板距离PH30对踝关节角度的变化比较明显,其最大变化幅度为22.564°,除此之外,踏板距离PH30和座椅高度H30对驾驶员髋关节和膝关节角度的影响都很小,幅度也不会超过5°。
2 驾驶员下肢部位关节力矩的计算研究
2.1 环节链模型
在对驾驶员驾驶姿势进行受力研究时,首先需要建立生物力学模型,本文对喷雾机驾驶员下肢关节力矩的计算采用的力学模型是环节链模型,驾驶员人体的基本模型主要由一系列环节构成的运动链所组成,各个环节之间由相应的关节连接,驾驶员的大腿、小腿和脚以及相应的髋关节、膝关节和踝关节便可以简化成一个环节链模型,并且是一个三环节链模型。将人体环节模型简化后进行相应的力矩计算分析时,可以从人体脚部的力矩进行计算,再通过模型来计算出其他关节的力矩,不仅简化了测量过程,并且提高了下肢关节力矩的计算效率和准确性。
2.2 下肢关节力矩的计算方法
为了转换下肢各关节力矩和环节链上末端力的两者关系,采用雅各宾矩阵转换的方法得到式(1)。
T=JTF
(1)
式中:T——驾驶员下肢关节力矩;
JT——雅各宾转换矩阵;
F——环节链末端力大小。
根据虚功原理和几何学关系,对于平面的三环节链模型,也可以用雅各宾法进行计算,其公式如式(2)和式(3)所示。
VW关节=T1δα1+T2δα2+…+TNδαN
=TTδα-FTδP
(2)
δP=Jδα
(3)
式中:VW关节——关节所做的虚功;
Ti——下肢关节力矩矢量;
δP——末端位移矢量;
δα——关节力位移矢量。
图7为平面三环节链模型图。图7中α1表示驾驶员髋关节角度,α2表示驾驶员膝关节角度,α3表示驾驶员踝关节角度,lt表示大腿环节长度,ll表示小腿环节长度,lf表示脚踝环节长度,P表示环节力末端点。
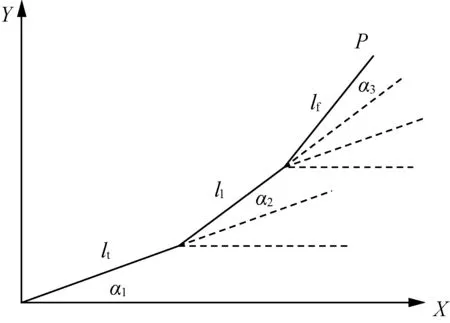
图7 三环节链模型坐标图Fig. 7 Coordinate diagram of three-link chain model
对于本文建立的平面三环节链,在不考虑重力和外力偶的作用,可以得到的雅各宾转换矩阵,如式(4)所示。
(4)
式(4)中:S1=sinα1;S12=sin(α1+α2);S123=sin(α1+α2+α3);C1=cosα1;C12=cos(α1+α2);C123=cos(α1+α2+α3)。
根据式(1),可以得到关节力矩
(5)
式中:Fx——下肢关节末端水平方向线位移;
Fy——下肢关节末端竖直方向线位移。
根据雅各宾法,建立驾驶员的下肢三环节链模型,把驾驶员下肢简化成小腿、大腿和脚部三个环节,把原点设为髋关节点,把脚部设为环节链的末端,并对驾驶员右下肢进行分析,在进行受力分析时需要考虑驾驶员身体各环节的自重,在矢状面内建立右下肢的平面三环节链模型,如图8所示。
通过RAMSIS软件可以査看第50百分位中国男性人体下肢环节的质量和质心坐标的位置,在软件中査看驾驶员大腿质心的坐标位置、髋关节位置和膝关节位置,计算得到大腿的相对质心位置,即驾驶员大腿质心位置到髋关节的距离与大腿的环节长度之比为λt,同理可得,驾驶员小腿质心位置到膝关节的距离与小腿的环节长度之比为λl,驾驶员脚踝的质心位置到踝关节的距离与踝关节点到脚踩踏板受力点的距离之比为λf。
根据雅各宾法和驾驶员下肢节链模型,得到计算下肢的各个关节力矩。
(6)
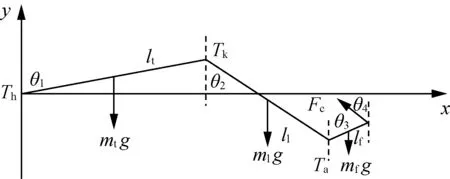
图8 右下肢三环节链模型Fig. 8 Right lower limb three-link chain model

(7)
式中:FCX——踏板阻力在水平方向的位移量;
FCY——踏板阻力在竖直方向的位移量。
通过对第50百分位中国男性人体测量可以得到,驾驶员大腿、小腿和脚踝的环节长度,lt=417.3 mm,ll=361.4 mm,lf=153.3 mm,驾驶员大腿、小腿和脚踝的环节质量,mt=7.2 kg,ml=2.7 kg,mf=1.7 kg,并计算得到下肢各个环节的距离比值λt=0.47,λl=0.38,λf=0.51。
当驾驶员在驾驶喷雾机的过程中,由于喷雾机的离合踏板阻力要比加速踏板大,因此驾驶员下肢在进行操作离合器的时候很容易感到不舒适,由于中国人的身体尺寸和欧美人存在差距,更加加重了操作的不舒适。踏板阻力、踏板行程、踏板倾角和座椅高度这4个因素直接影响驾驶员的操作舒适性。座椅高度会影响到驾驶员的下肢驾驶姿势和关节角度。踏板倾角和踏板阻力会直接影响驾驶员的下肢关节受力,踏板行程决定了驾驶员在进行操作踏板过程中下肢各个关节所做的功的大小[20]。
2.3 结果与分析
2.3.1 髋关节力矩
对驾驶员下肢力矩进行分析,根据喷雾机实际的参数测量和对部分学者研究的参考选择喷雾机离合器的踏板行程为130 mm,最大踏板阻力为100 N,使用RAMSIS软件得出驾驶员在驾驶喷雾机踩下和抬起离合时,驾驶员左脚踩离合器的过程中不同位置的驾驶姿势,测量相应姿势下的关节角度并选取10个位置点,为了和驾驶员在操作工作时的真实情况接近,预测驾驶姿势需要保持上半身姿势不变的前提,并且把驾驶员在操纵离合过程的姿势看成是静态驾驶姿势,由式(5)可以得到驾驶员在进行离合操作时下肢各个位置的关节力矩,在踩下—松开离合的过程用数字0~1表示,驾驶员操纵离合时髋关节力矩如图9所示。
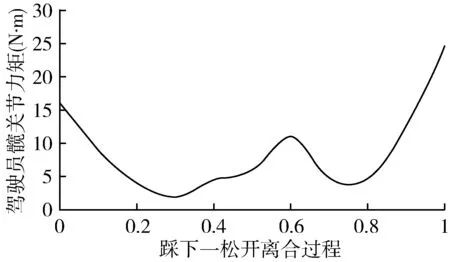
图9 操纵离合过程中驾驶员髋关节力矩Fig. 9 Torque of the driver’s hip joint during themanipulation and clutch
从图9可以看出,驾驶员在进行踩下—松开离合踏板的过程中,驾驶员的髋关节所受力矩随着水平数值从0逐渐增大1时,髋关节所受力矩从最开始16.2 N·m 快速减小到2.5 N·m,后继续缓慢增大到10.86 N·m再减小为4.68 N·m,最后增大为24.6 N·m,整个过程中有两次分别达到了2.5 N·m和4.68 N·m,是驾驶员进行操纵离合时髋关节力矩的极小值,还可以明显的看出驾驶员在踩下和松开离合踏板时的髋关节力矩都处于最大值分别是16.2 N·m和24.6 N·m。
喷雾机驾驶员在踩下离合前,由于重力作用髋关节所受力矩很大,在缓慢踩下踏板时,离合踏板分担了驾驶员一部分下肢重力,髋关节力矩有所减小,但在这个过程中离合踏板的阻力和水平方向的夹角在不断变换,由于夹角在不断变小,离合踏板阻力对驾驶员髋关节的力臂也相应的减小,在某一位置驾驶员髋关节的阻力矩最大,相反髋关节力矩处于最小,随后的操纵过程中,离合踏板的阻力方向与水平地面的夹角继续减小,但在离合踩到底之前,由下肢自身重力引起的髋关节力矩会有所增大。
在驾驶员操纵离合过程时,要遵循一快二慢三联动的操纵离合原则,刚开始抬离合时,离合踏板对脚部的力减小,从图中可以明显看出喷雾机离合踏板空行程过程驾驶员的髋关节力矩有上升趋势,但是到了离合半联动状态时,脚部需要一定的力使离合稳定,此时离合踏板的反作用力增大,力臂也会比空行阶段大一些,所以髋关节力矩在某一位置再次达到极小值点,随着驾驶员脚慢慢松幵踏板时踏板的反作用力减小,这时驾驶员髋关节力矩快速增大,直到完全松开离合踏板,髋关节力矩最终达到最大值。
图10为座椅高度和离合踏板最大阻力对驾驶员髋关节力矩的影响。从图10可以看出,随着座椅高度H30由开始的240 mm增加到280 mm时,驾驶员的髋关节力矩也从6.7 N·m随之增大到了10.3 N·m。随着座椅高度H30逐渐增大,离合踏板阻力作用在驾驶员髋关节的力臂减小,其髋关节的阻力矩也减小,因此驾驶员的髋关节力矩逐渐增大。当座椅高度H30保持不变,让离合踏板阻力由80 N增大为120 N时,驾驶员的髋关节力矩从8.07 N·m明显减小到1.7 N·m,说明驾驶员的髋关节部位的舒适度并不是由离合踏板阻力产生的。

图10 驾驶员髋关节力矩与踏板阻力和座椅高度间关系Fig. 10 Relationship between driver hip torque andpedal resistance and seat height
2.3.2 膝关节力矩
用同样的方法对驾驶员操纵离合时膝关节力矩进行分析,分析结果如图11所示。从图11可以看出,驾驶员的膝关节所受力矩随着水平数值从0逐渐增大到1时,膝关节所受力矩从最开始7.18 N·m快速增加到10 N·m,后继续缓慢减小到9 N·m再增大到9.8 N·m,最终力矩值达到8 N·m,整个过程中有两次达到了极小值7.18 N·m和9 N·m,还可以明显看出驾驶员在踩下和松开离合时膝关节力矩的最大值分别为10 N·m和9.8 N·m。
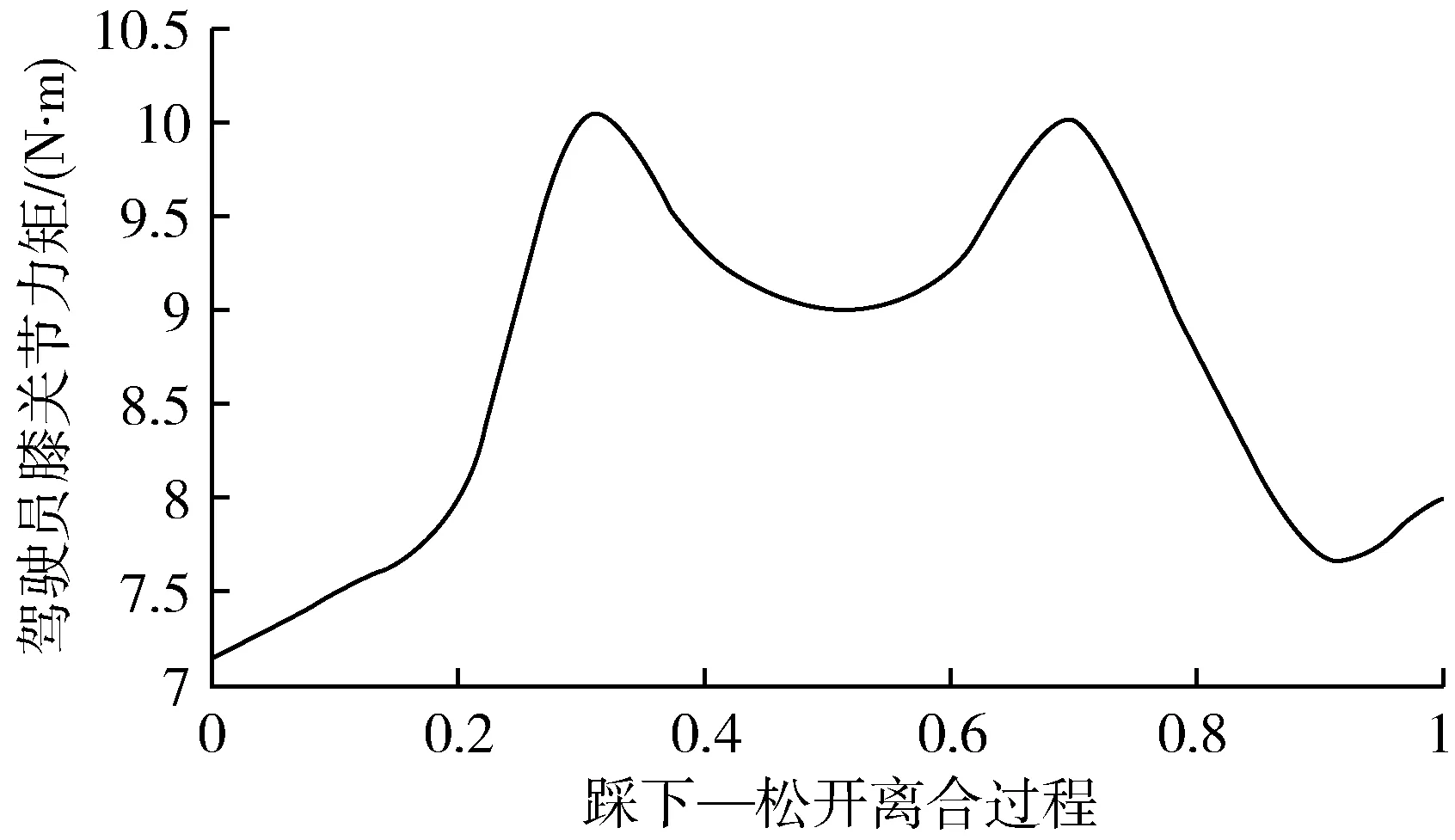
图11 操纵离合过程中驾驶员膝关节力矩Fig. 11 Torque of the driver’s knee joint duringclutch operation
喷雾机驾驶员在进行离合操纵过程中,在刚开始踩下离合踏板后,踏板的反作用力增大,同时离合踏板产生的阻力对驾驶员膝关节的力臂相应减小,导致膝关节的阻力矩减小,最终使得驾驶员膝关节力矩快速增大,随着驾驶员膝关节的屈伸,使得离合踏板产生的阻力力臂增加,而驾驶员膝关节力矩相应减小。
在驾驶员抬起离合踏板后,在空行阶段踏板对驾驶员脚部的反作用力减小,膝关节的阻力矩也相应减小,图11中曲线开始逐渐呈上升趋势,在半联动时为了稳定踏板,驾驶员脚部受到踏板的支持力变大,对膝关节产生的阻力臂和阻力矩相应增大,这时由驾驶员小腿和脚部的重力作用所产生的膝关节力矩呈减小状态,随着离合踏板的缓慢松开,阻力力臂的增大直接影响膝关节力矩大小,最终驾驶员膝关节力矩呈现下降的趋势。
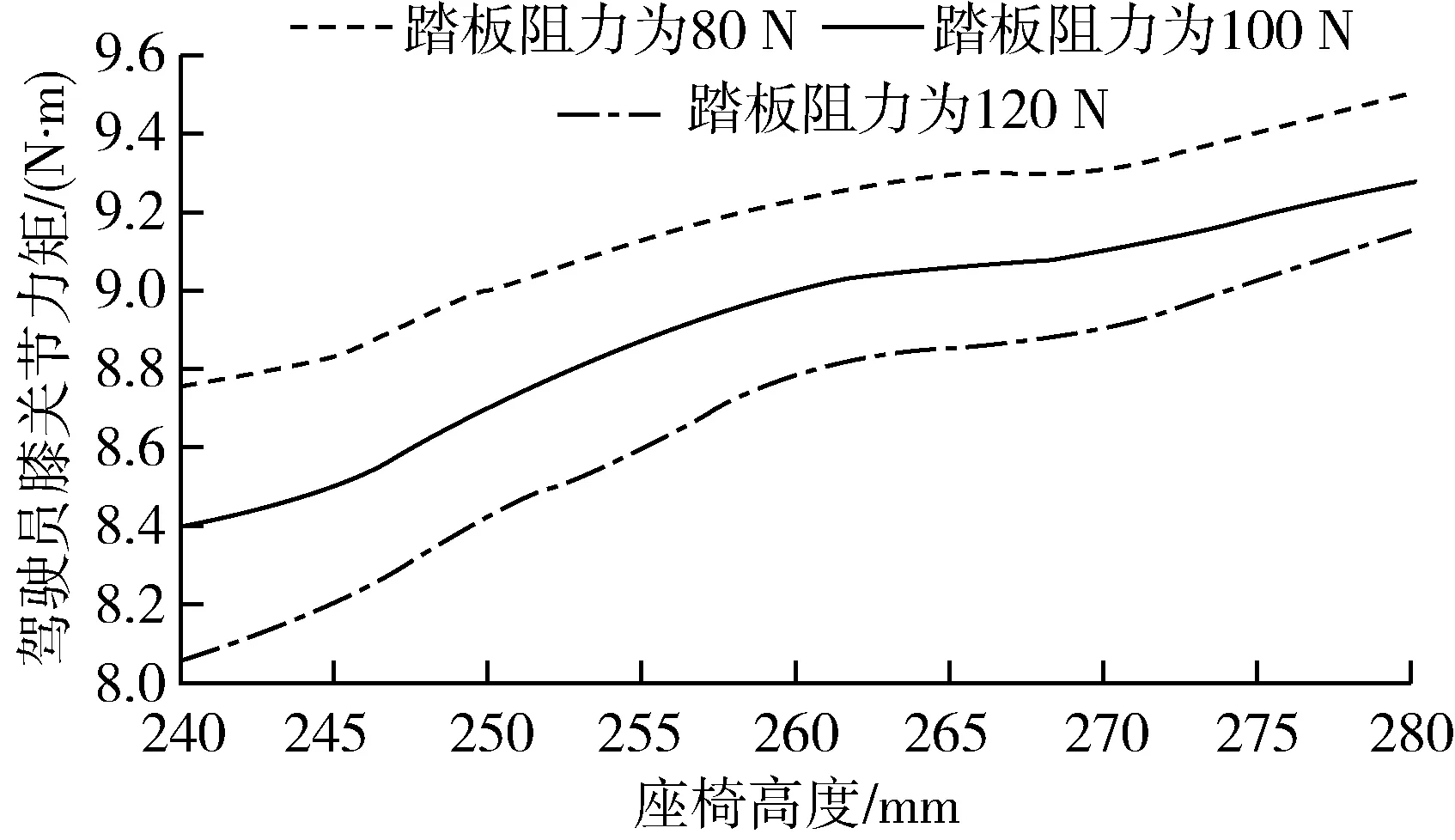
图12 驾驶员膝关节力矩与踏板阻力和座椅高度间关系Fig. 12 Relationship between driver’s knee torque andpedal resistance and seat height
图12为座椅高度和离合踏板最大阻力对驾驶员髋关节力矩的影响。从图12可以看出,座椅高度H30和离合踏板阻力对驾驶员膝关节力矩的影响与前面对驾驶员髋关节力矩的影响相似,当座椅高度H30保持不变,让离合踏板阻力由80 N增大为120 N时,驾驶员的膝关节力矩由8.79 N·m减小到8.08 N·m,与离合踏板阻力呈现反相关,随着座椅高度H30增大到280 mm时,驾驶员的膝关节力矩也随之增大,因此座椅高度H30与膝关节力矩呈现正相关。
2.3.3 踝关节力矩
对驾驶员操纵离合时踝关节力矩进行分析,结果如图13所示。从图13可以明显看出驾驶员的踝关节力矩绝大部分都为负值,并且随着水平数值从0逐渐增大到1时,踝关节所受力矩由开始的-1 N·m先减小为-4 N·m后再增大到-2.3 N·m,随后减小到-3.8 N·m最终逐渐增大到1 N·m,整个操纵离合过程中也曾两次达到了极小值。
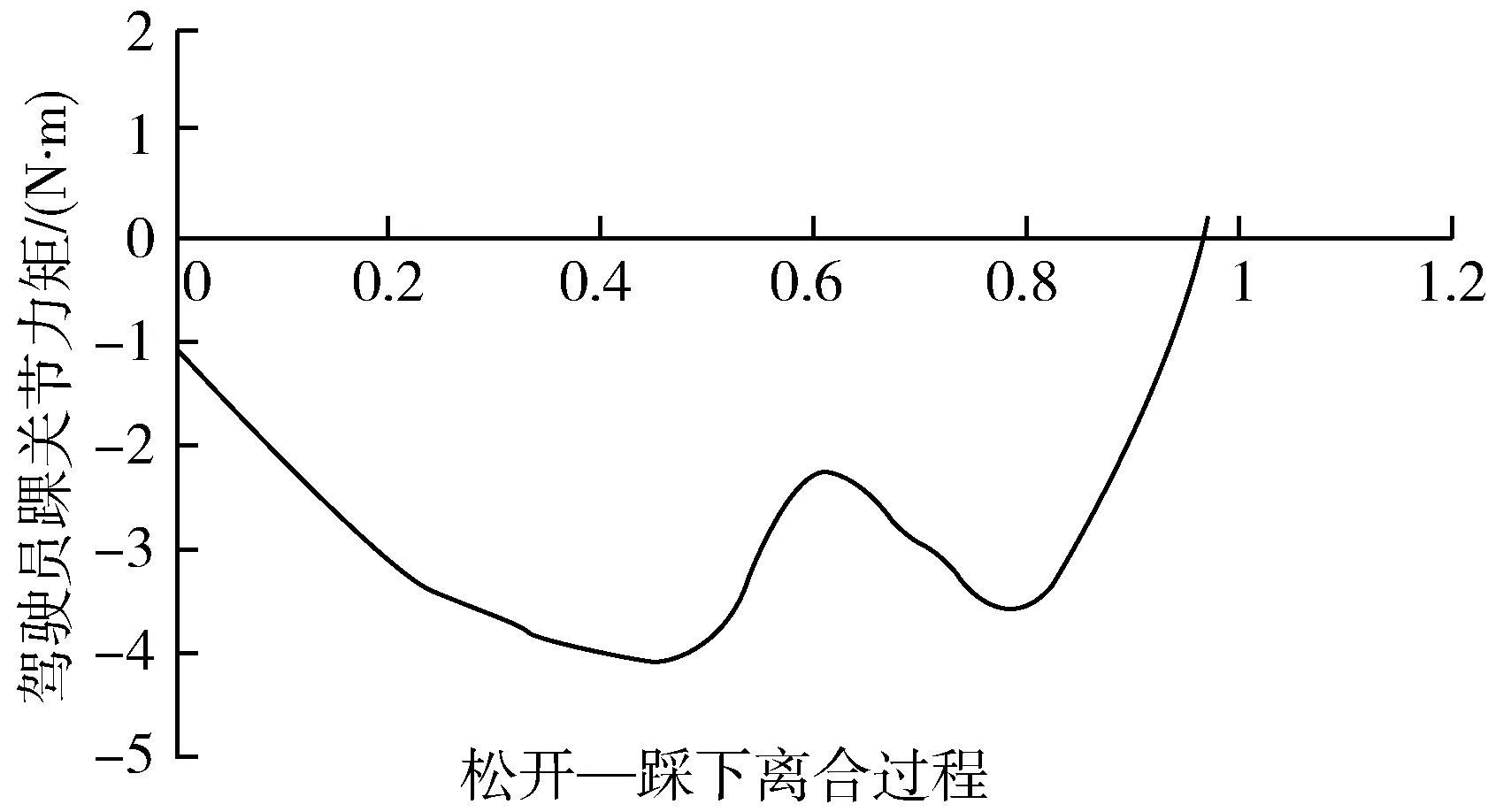
图13 操纵离合过程中驾驶员踝关节力矩Fig. 13 Torque of the driver’s ankle joint during steering clutch
主要因为要想使踏板阻力与驾驶员踝关节力矩平衡,驾驶员的小腿肌肉群必须要进行一定的收缩,当驾驶员踩下离合踏板后,离合踏板阻力矩大于驾驶员脚部重力在踝关节的力矩,导致离合踏板对驾驶员踝关节的阻力臂减小,所以踝关节力矩曲线会有所上升,随着离合踏板抬起,离合踏板阻力臂快速增加,踝关节力矩呈现下降趋势,最后离合踏板完全结合,离合踏板对驾驶员脚部的反作用力减小产生的阻力矩也相应减小,踝关节力矩曲线逐渐上升,可以得出离合踏板阻力所产生的阻力矩作用对驾驶员踝关节的影响比其他因素要更加明显。

图14 驾驶员踝关节力矩与踏板阻力和座椅高度间关系Fig. 14 Relationship between driver’s ankle torque andpedal resistance and seat height
图14为座椅高度和离合踏板最大阻力对驾驶员踝关节力矩的影响。从图14可以看出,随着座椅高度H30由240 mm增大到280 mm时,驾驶员的踝关节力矩绝对值是减小的。而当座椅高度H30不变,逐渐增大离合踏板阻力时,驾驶员的踝关节力矩绝对值呈现增大的趋势,这说明驾驶员的踝关节部位产生的不舒适主要是由离合踏板阻力产生的。
3 结论
针对目前驾驶姿势舒适性的研究主要是从人体的关节角度出发,不能对人体关节受力准确反映,从而影响驾驶员驾驶舒适性的问题,建立了驾驶员—自走式喷雾机生物力学模型,计算分析驾驶员下肢关节力矩与驾驶舒适性影响规律。
1) 首先以RAMSIS软件进行试验并测得不同座椅高度和离合踏板距离下的驾驶员下关节角度,对数据进行单变量的回归分析,得出喷雾机的踏板距离PH30和座椅高度H30与驾驶员的主要下肢关节角度呈线性关系,且相关系数也都非常接近1,说明布局参数与下肢关节角度高度线性相关。其中踏板距离PH30对踝关节角度的变化比较明显,其最大变化幅度为22.564°,除此之外,踏板距离PH30和座椅高度H30对驾驶员髋关节和膝关节角度的影响都很小,幅度也不会超过5°。
2) 运用三环节链模型、雅各宾方法计算驾驶员的髋、膝、踝关节力矩,分析座椅高度和离合踏板阻力对其的影响,得出驾驶员下肢各关节舒适性的影响因素都不相同,其中离合踏板的阻力方向和力臂变化对髋、膝关节舒适性影响较大,而踏板阻力的力矩作用对踝关节影响更明显,可以看出驾驶员在操作离合踏板过程中驾驶员踝关节力矩大部分为负值。
