汽车高速公路横坡转向稳定性分析
2021-08-13李松珏谢欣然吴明虎冯清杨弘毅魏登杨鑫
李松珏,谢欣然,吴明虎,冯清,杨弘毅,魏登,杨鑫
(成都理工大学工程技术学院,四川 乐山,614000)
0 引言
转向稳定性是汽车研究的重点,区别于常见转向稳定性研究,本文根据特定行驶工况,建立了含轴距和轮距的汽车横向坡道转向行驶工况的动力学和数学模型。通过对该数学模型的仿真,可以得到所设计的轴距和轮距是否使汽车转向稳定性变差,从而预测轴距和轮距设计是否合理。这缩短了汽车设计周期,降低汽车的设计成本,提高了设计效率。
1 横向坡道转向行驶汽车动力学模型的建立
要分析汽车转向稳定性,首先要建立相应的汽车力学模型[1]。在本文中,忽略汽车悬架弹性变形和轮胎垂直路面的弹性变形,只考虑汽车轮胎的弹性侧偏。现代汽车常在高速公路行驶,而高速公路为便于排水,或在转弯处为避免转向运动产生的离心力导致汽车侧翻要设立超高,即有横向坡度。由此建立汽车在横向坡道转向行驶的动力学模型,如图1所示。

图1 汽车横向坡道转向行驶动力学模型
横向坡道坡度α根据国标《JTG-B01-2014-公路工程技术标准》中的规定,由表1确定。本文取横向坡道坡度分别为0°、3.43°、5.71°。

表1 横向坡道超高值
2 根据力学模型建立数学模型
根据图1的汽车横向坡道转向行驶动力学模型可以逐步分析后建立数学模型。
汽车在横向坡道转向行驶时,过质心的横向截面内,重力分力为Y。
汽车车轮还受到方向为侧向的侧偏力的作用。4个车轮共4个侧偏力,分别为:Yfl、Yfr、Yrl、Yrr。
从力学模型图1可以看出,汽车转向轮航向即速度方向与x轴即汽车的纵向有一个夹角ζ,该夹角是转向轮的转向角,同时也是汽车转向轮速度方向与其在x轴上速度分量的夹角。
分析图1,Yfl、Yfr、Yrl、Yrr作用于轮胎,其方向基本垂直于汽车航向,即和汽车横向方向y轴方向基本一致。同时,汽车在横向斜坡上行驶,汽车重力在过质心的横向截面内的分力Y也和汽车航向基本垂直,也和汽车横向方向y轴方向基本一致。Y构成了汽车在横向坡道转向行驶的对汽车转向稳定性的侧向干扰力。
汽车转向稳定性可以分别用质心侧偏角和横摆角速度响应来评价[2]。
由上分析,建立汽车侧向(横向)运动方程如下:
(1)
Yfl、Yfr、Yrl、Yrr会产生作用在汽车上的绕坐标系z轴的横摆力矩。据此分析,建立汽车横摆运动方程如下:
(2)
式中Iz为汽车绕z轴的转动惯量。
根据式(1)、式(2),可得如下方程:
(3)
(4)
式(3)、式(4)成为描述汽车在横向坡道上转向行驶的数学模型。式中同时包含了参数轴距和轮距。从这两式可以看出,转向轮转向输入任意角度ζ、汽车的运动与地面坐标系的位置和汽车航向无关。汽车的轴距、轮距以及轮胎的侧偏刚度、质量、高速公路的横向坡度将会影响汽车的运动。汽车质心侧偏角θ以及横摆角速度r导致汽车产生的角度组成汽车转向轮转向角ζ[3]。其中,θ和r是评价汽车转向稳定性的主要参数[4]。
3 汽车横向坡道转向行驶仿真
3.1 运用Matlab/simulink建立仿真模型
Matlab是一款功能强大的应用软件。Matlab中的simulink工具箱用于仿真分析,可以获得可视化数据用于分析,十分方便快捷。本文运用simulink工具箱构建汽车横向坡道转向行驶simulink仿真模型。对于类似的与横向动力学相关的设计方法理念,近年来的研究很多。WARTH G等在Matlab/simulink中建立14自由度的非线性整车模型,通过该模型,论证了所设计的控制器的有效性[5]。RUBI-MASSEGJ等运用仿真的方法验证了所设计的悬架静态输出反馈控制器性能良好[6]。JAVANSHIR I等人利用仿真软件对越野车悬架进行建模仿真并优化悬架几何参数,同时根据仿真结果,分析了悬架几何参数优化前后对越野车转向稳定性的影响[7]。AOUADJ N等设计了车辆动力学控制系统,并通过仿真证明了该控制系统的有效性和对整车转向稳定性的提高[8]。崔勇等运用仿真软件对整车转向稳定性做出了分析[9]。
3.2 仿真分析数据和转向轮转向角阶跃输入
simulink建模仿真所需数据为某车型数据,如表2所示。
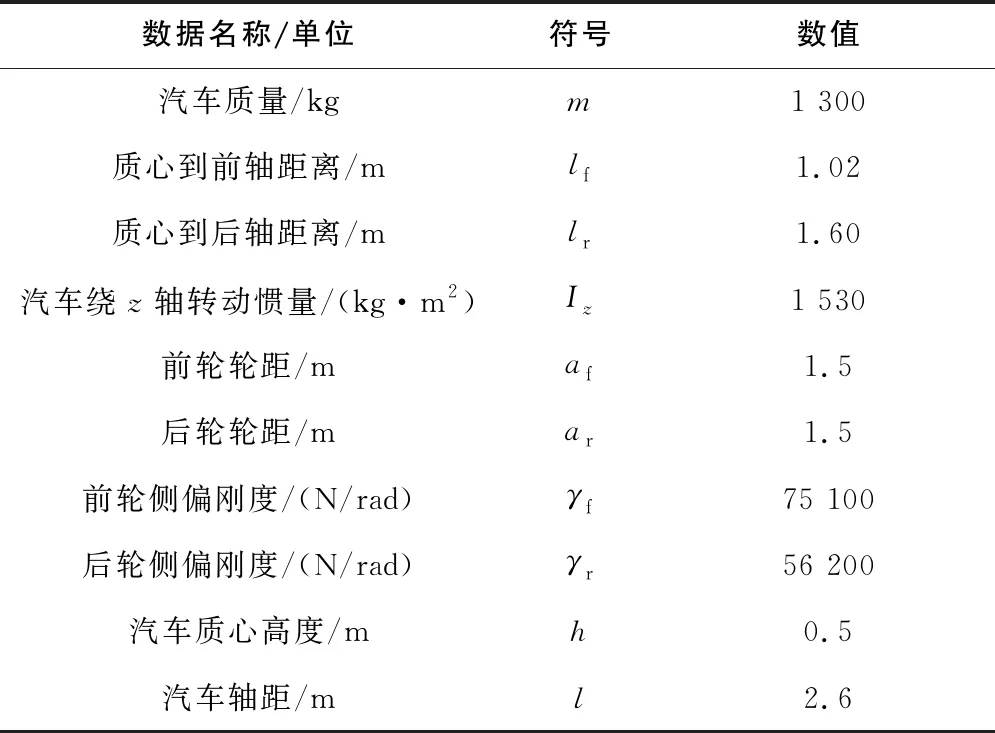
表2 仿真所需数据
本文根据表2的数据,通过对所建的simulink模型的仿真,分析该型汽车在道路不同横向坡度和不同车速两方面的转向稳定性,从而分析该车型的轴距和轮距对转向稳定性的影响,最后得出该车型的轴距和轮距设计是否满足汽车转向稳定性的结论。
仿真输入采用转向盘的角阶跃输入。角阶跃输入试验是路上试验中最典型的试验[10]。汽车对转向盘输入的瞬态响应能够通过阶跃试验反映[11]。本文中,转向盘的角阶跃为转向轮的转向角阶跃输入。
3.3 转向轮角阶跃输入final值为定值的仿真结果
转向轮转向角阶跃输入时间为10s,同时也是仿真时间。
转向轮转向角阶跃输入按如下工况:由于汽车的转向盘存在自由行程,因此,转向轮的转向角阶跃输入initial值在0.5 s前为0。0.5 s的时间意味着转向盘转过自由行程。阶跃输入的final值为0.01 rad。
汽车横向坡道转向行驶工况如下:该型汽车在横向坡度为0°、3.43°、5.71°的横向坡道,分别以速度为80km/h、100km/h、120km/h速度转向行驶。阶跃输入仿真结果如图2所示;横摆角速度、质心侧偏角、侧向加速度仿真结果如图3所示。

图2 阶跃输入曲线

图3 横摆角速度、质心侧偏角、侧向加速度响应曲线
4 仿真结果分析
根据图3的仿真结果,该型汽车分别在横向坡度为0°、3.43°、5.71°的横向坡道,阶跃输入final值为0.01rad时,分别以速度为80km/h、100km/h、120km/h速度转向行驶,侧向加速度峰值和稳定值均小于该车在相应横向坡度的侧翻阈值,这意味着该型汽车在此阶跃输入下不会发生侧翻。
图3中该型汽车在不同坡度以不同速度转向行驶时,横摆角速度超调量最大为103.27%,最小为100.5%。超调量较小且变化不大,该型汽车能够迅速从横摆角速度峰值回到稳定状态,说明该型汽车转向稳定较好。横摆角速度、侧向加速度各自的峰值响应时间能够反映汽车对转向响应的灵敏程度[12]。质心侧偏角和侧向加速度峰值时间较小,说明该型汽车瞬态响应迅速,转向灵敏。
根据本文表2数据,计算出lfγf-lrγr<0。即该型汽车有不足转向特性。该型汽车特征速度vch=50km/h。当速度为80km/h、100km/h、120km/h时,均大于特征速度vch。故该型汽车质心侧偏角稳态值在同一横向坡度上随速度的增加而减小,直至为负值。在速度120°、横向坡度为5.71°时,质心侧偏角达到-0.006762rad。当该型汽车以同一速度在不同坡度上转向行驶时,不同横向坡度导致的侧向力Y大小随横向坡度不同而不同,横向坡度为5.71°时,Y最大。所以当该型汽车以同一速度在不同横向坡度的横坡上行驶时,Y与车轮的侧偏力共同平衡离心力,质心侧偏角随横向坡度的增加而减小。在横向坡度为5.71°时,质心侧偏角最小。说明该车型在横向坡道行驶时转向稳定性较好。汽车的侧向力越大,汽车抵抗干扰的能力越强,侧向偏移越小[13]。
5 结语
本文建立了考虑某车型横向坡道转向行驶的动力力学模型,并建立了相应的数学模型。根据此数学模型建立了仿真模型。仿真结果为该车型以80km/h、100km/h、120km/h的速度,在不同横向坡度转向行驶时的横摆角速度、质心侧偏角、侧向加速度的数据视图。根据这些数据视图分析了该车型在横向坡道上转向行驶的转向稳定性。
分析结果说明该型汽车轴距、轮距设计符合汽车转向稳定性。
