低成本微型飞行器自动化测量平台的设计与搭建
2021-08-13石健瑜薛雅丽
石健瑜,薛雅丽
(南京航空航天大学 自动化学院,江苏 南京211106)
0 引言
微型飞行器(MAV)是20世纪90年代发展起来的一种新型飞行器,因尺寸小、质量轻、成本低、功能强、携带方便、操作简单等特点,在军事领域和民用领域都有着十分诱人的应用前景。微型飞行器主要分为3种:固定翼、旋翼机、扑翼机。由于扑翼机不像固定翼飞行器一样有完整、成熟的理论体系与计算模型和方法,气动计算的可靠性还有待验证,因此通过风洞试验得到的结果更为真实、可靠。近年来国内外都建有专门针对微型飞行器设计的低速、低湍流度风洞。
西北工业大学[1]为了对微型扑翼机进行研究,研制了一座微型飞行器专用风洞。该风洞具备较低的稳定风速,配备了三分量应变式天平,可以对微型飞行器的气动特性进行研究。上海大学[2]设计并建造了一座用于研究MAV气动力性能的可调低湍流度风洞,具有可变湍流度、低湍流度、低噪声等特点,并提出将零质量射流技术用于控制MAV小展弦比翼型流场,改善了其流动状态。北京航空航天大学[3]研制出了一种经济、实用的低速小型风洞实验装置,可满足各种教学实验和模拟实验以及一般科研工作的需要,对小型实用风洞的推广应用具有实际意义。
国外低湍流度风洞的研制集中在发达国家。美国斯坦福大学机械工程系[4]建造了一个封闭式隧道风洞,隧道的各个组件设计为协同工作,以产生均匀速度、均匀温度、低湍流和低噪音的流量。日本福冈工业大学[5]建造了一种低成本、主动控制的多风扇风洞,有助于使用自然风的实验研究。
综上所述,因常规风洞最低稳定风速太高、雷诺数太大、湍流度太高的特点,故现有测试设备不适合微型扑翼飞行器。国内外大学和研究机构近年来已经开始针对微型飞行器设计小型低湍流度的实验设备,但没有通用的实验设备可以采用。因此,本文研制了低成本微型扑翼飞行器气动性能自动化测试平台。
1 风洞洞体设计与搭建
通过SolidWorks建模设计并分析,提高设计效率,降低开发成本[6],风洞模型如图1所示。

图1 SolidWorks建模
设计完成后的风洞结构与尺寸如图2所示。

图2 风洞结构与尺寸
1.1 收缩段
常用的收缩曲线有维特辛斯基收缩曲线、双三次曲线、五次方曲线收缩曲线,对比上述曲线后[7]采用双三次曲线。收缩段沿着气流方向截面逐渐缩小,入口和出口均为方形,用于给实验段提供均匀的气流。双三次曲线公式如下:
式中:xm为两曲线连接点;L为收缩段的长度;D为出口高或宽;D1为进口高或宽。
计算表明,如图1所设计的收缩段流道内流动不出现分离,且出口速度具有好的均匀度和较低的湍流度。
1.2 稳定段
稳定段内部有蜂窝器和两层阻尼网,用于降低气流横向的湍流度[8]。蜂窝器的格子采用塑料吸管手工裁剪、拼接而成。蜂窝器的孔眼圆直径为 10mm, 在稳定段的截面内大约有1 600个蜂窝格子。两层阻尼网间距为128mm,采用30目的钢丝纱网。
1.3 实验段
实验段的框架由不锈钢制作,侧壁采用透明亚克力板制作,实验段上部可以打开,便于安装与拆卸实验和测量装置。下部有预留的开孔,用于安装支撑装置和测量设备。
1.4 扩压段
扩压段是一段沿着气流方向截面积逐渐扩大的管道,扩散角为6°,沿着风向截面面积逐渐扩大,出、入口截面均为方形。入口与实验段连接,出口与动力段连接,把气流的动能变为压力能。
1.5 扑翼机支撑装置
扑翼机支撑装置设置在实验段处,通过实验段下方开孔安装。支撑装置的上部有连接装置与扑翼机模型连接,并且设计有调节机构,可以实现扑翼机模型俯仰角的变化,通过调节侧壁上预留连接孔的位置,从而控制角度的变化。底座通过螺栓固定在多轴测力传感器上,并且在与扑翼机的连接处留有电源线接口,给扑翼机提供稳定的外接电源。
风洞实物图见图3。

图3 风洞实物图
2 测试控制系统的设计与搭建
2.1 测力传感器
针对微型飞行器设计了一个二维高精度的力传感器测量系统,分别测量牵引力与升力。牵引力和升力测量范围为-300g~300g(-1.96 N~1.96 N)。测量原理:多轴测力传感器把采集到的力学信号转化为电压信号,通过数据采集卡(NI MCC 8通道,12位采样)和信号放大电路传入计算机进行储存与显示。传感器位置位于实验段正下方,上端直接与支撑装置连接,下部连接一金属块用来减少振动。示意图[9]见图4。

图4 力传感器示意图
2.2 温度湿度传感器
利用温湿度传感器((RS485)来测量洞体内部的温度和湿度,通过计算机计算出空气密度,为扑翼机空气动力学各个参数的关系研究提供参考。
温湿度传感器连接于实验段下端,通过实验段下部的开孔将传感器的探头伸入实验段,再将接口与计算机连接,通过计算机进行数据的处理。指标参数:采样速率0~100 k/s。温湿度传感器示意图见图5。

图5 温湿度传感器示意图
2.3 高速摄像机
高速相机(GigE)安装于实验段上部的支架上,镜头正对扑翼机模型,对焦后用于拍摄扑翼机扑动的视频,测量扑翼机的扑动姿态和扑动频率。
2.4 风速调节装置
风洞内部的气流由动力段内风机中的电机带动扇叶旋转产生,风机配备调速装置,可以实现风速的连续调节,并以此模拟不同的自然风速条件。利用热线式风速仪可以采集洞体内部风速的实时变化,接入计算机通过显示面板实时显示,作为控制风机转速的标准。
2.5 机翼扑动调节装置
扑翼机自带电源无法维持长时间稳定扑动,因此设计了外接直流电机控制电路。选用220V AC转5V DC电源适配器,DC-DC可调升压稳压电源模块, CCM6N PWM直流电机调速器, GA12-N20减速电动机,可控制电机额定状态下的转速达2000r/min。电路概念图见图6。

图6 扑动装置电路概念图
3 LabVIEW软件程序编写
软件系统基于LabVIEW的上位机程序,可实现升力和牵引力连续高速采集功能。借助LabVIEW软件,利用虚拟软件仿真硬件,进行软件设计:子程序分别通过各传感器测试计算得到微型扑翼飞行器的升力、牵引力、风速、温度、湿度、空气密度,同时高像素摄像头进行气流观测和运动学测量,并通过LabVIEW控制风机转速,5个子程序封装完成后用状态机完成主流程。
3.1 测力传感器子程序
力传感器模块后面板见图7。
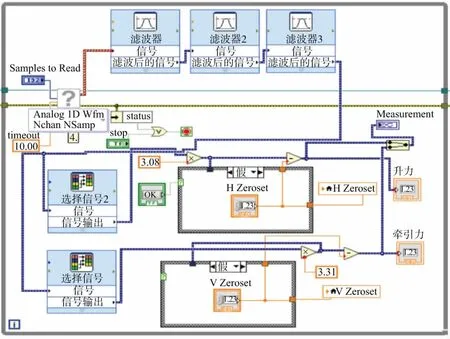
图7 力传感器模块后面板
3.2 温湿度传感器子程序
温湿度传感器子程序见图8。

图8 温湿度传感器子程序
3.3 高速摄像机子程序
高速摄像机子程序界面见图9。

图9 高速摄像机子程序
至此,风洞的软件搭建部分结束。总控制面板见图10。

图10 总控制面板
4 软硬件系统调试校准
将已知砝码的质量作为理论值,与力传感器测出的实验值进行对比,完成力传感器的校准实验。实验数据见表1。
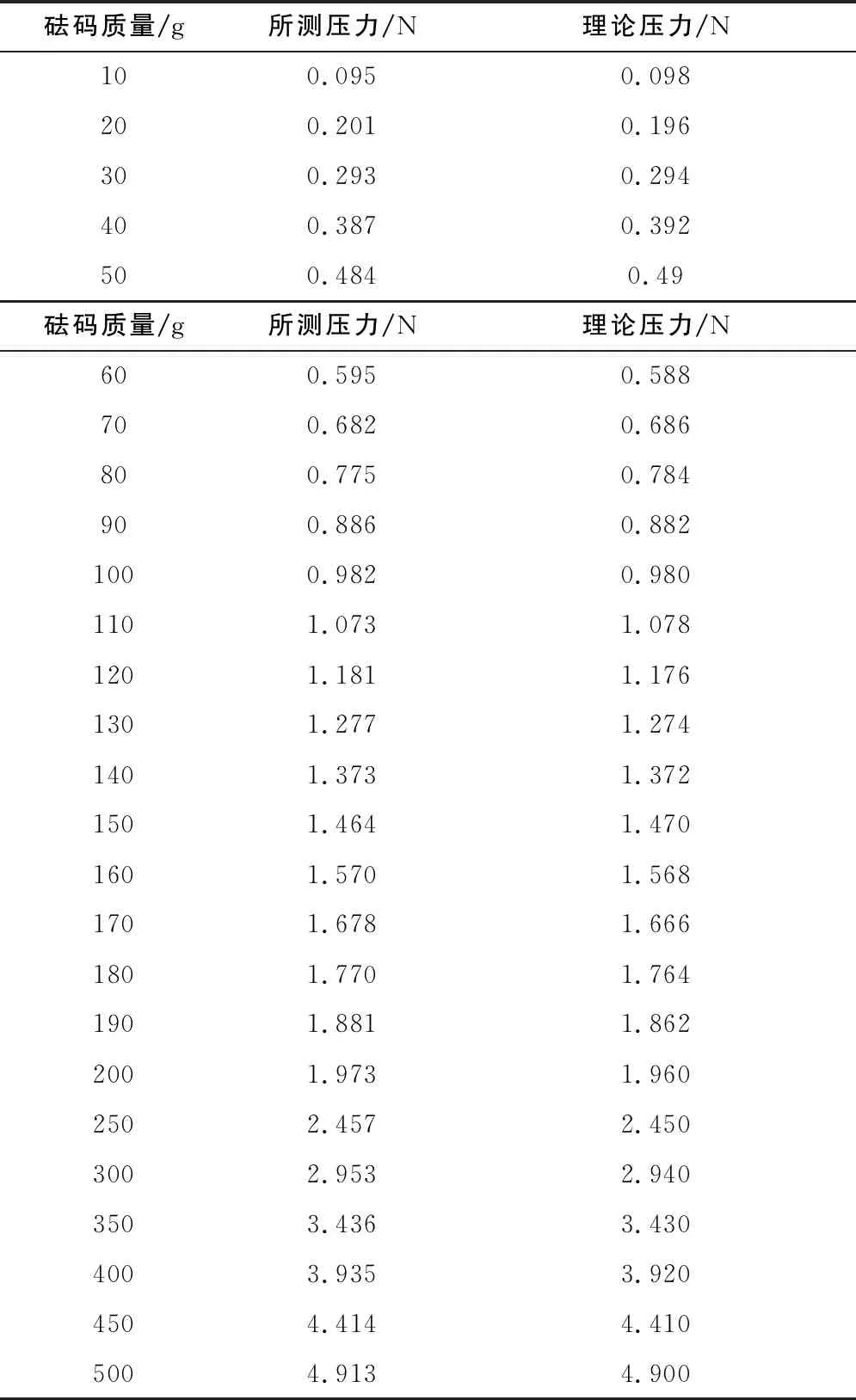
表1 升力校准实验数据
将实验数据与理论数据作图对比,见图11。

图11 升力校准曲线
由图11可知,实验数据与砝码理论数据基本重合,校准成功。
再进行牵引力校准实验,方法同升力校准实验。实验数据见表2,牵引力校准曲线见图12。

表2 牵引力校准实验数据
由图12可知,实验曲线与理论曲线基本重合。校准成功。
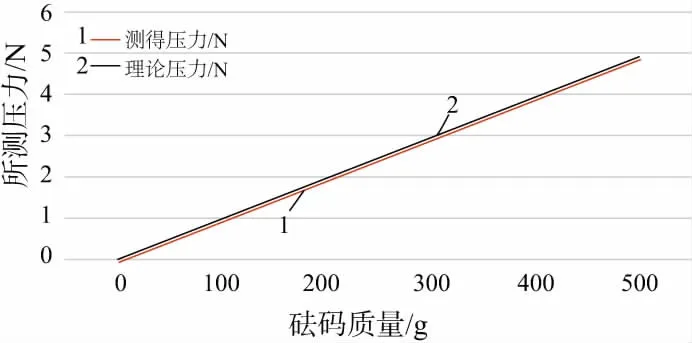
图12 牵引力校准曲线
微型扑翼飞行器气动性能测试平台的软、硬件搭建及其校准工作全部完成,可以利用此风洞平台进行扑翼机模型实验、固定翼实验。
5 结语
本文研制了一套低成本微型扑翼飞行器自动化测量平台的设计与搭建,其创新点如下:
1)针对微型飞行器设计了一个低成本、低速微小型开口式直流风洞,可进行风速调节;
2)针对微型飞行器设计了一个二维高精度的力传感器测量系统;
3)针对扑翼机自带电源无法维持长时间稳定扑动的限制,设计了外接直流电机控制电路;
4)针对测量需要编写了基于LabVIEW的数据采集与处理软件,可以实时采集传感器里数据并计算和显示。
