基于继电反馈的被控对象特征参数研究
2021-08-10张立广李红楠严宇欣
闫 曌, 张立广, 李红楠, 刘 颖, 严宇欣
(1. 西安工业大学 电子信息工程学院, 陕西 西安 710021;2. 大连长丰实业总公司航丰公司, 辽宁 大连 116038)
0 引 言
文献[1]报道Astrom等提出基于继电反馈的PID整定方法,在工业界有着广泛应用。该方法在闭环回路中加继电器产生振荡,通过获取系统输出振荡时的临界参数,利用Z-N规则[2]来调整PID参数。然而,Z-N方法存在不稳定、精度低等不足,无法准确得到PID控制器的参数。
大多数工业过程可近似为低阶惯性加纯滞后环节[3],在整定参数时,应该根据不同对象的模型、特性等因素选择合适的方法。文献[4]提出一种改进型的继电反馈自整定PID用来控制自衡过程。文献[5]针对实际工业对象,设计继电反馈参数自整定算法。文献[6]采用继电反馈进行参数获取,根据对象的振荡输出曲线辨识模型参数和临界信息。但均存在截断误差,对临界增益的辨识精度低,在时滞大的工业过程中不能取得较好的结果。
针对Z-N方法整定PID参数时存在的不足,本文采用继电反馈方法,对一阶惯性纯滞后环节的工业对象进行仿真研究,推导了临界信息与传递函数参数的函数关系,实现工业对象的信息辨识。
1 继电反馈基本原理及建模
在工业领域内,大多数被控对象结构复杂,无法获得被控对象的精确模型[7]。参数整定规则大部分是基于传递函数进行整定的,然而大多数被控对象均不是标准的延迟形式,为了使结论能广泛应用,将传递函数等效为一阶惯性加滞后的模型。但惯性和纯滞后的时间无法确定,因此本文采用继电振荡的方法,得到临界参数Ku和Tu,通过建立模型,得到临界参数与传递函数中特征参数的函数关系,从而对控制器进行参数整定。
1.1 基本原理
继电反馈方法是在闭环控制回路中加入继电控制[8],利用继电控制的非线性特性使被控过程出现极限环振荡,利用振荡曲线信息估计动态过程数学模型的特征参数Tu和Ku,进而计算PID控制器的参数。
继电整定法在控制系统中设置2种模式[9]:测试模式和调节模式。测试模式由一个继电非线性环节来测试系统的振荡频率和振荡幅值;调节模式由系统的特征参数首先得出控制器参数,然后由控制器对系统的动态性能进行调节。如果系统的参数发生变化,则需要重新进入测试模式进行测试[10],测试完毕后再回到调节模式进行控制。结构框图如图1所示。
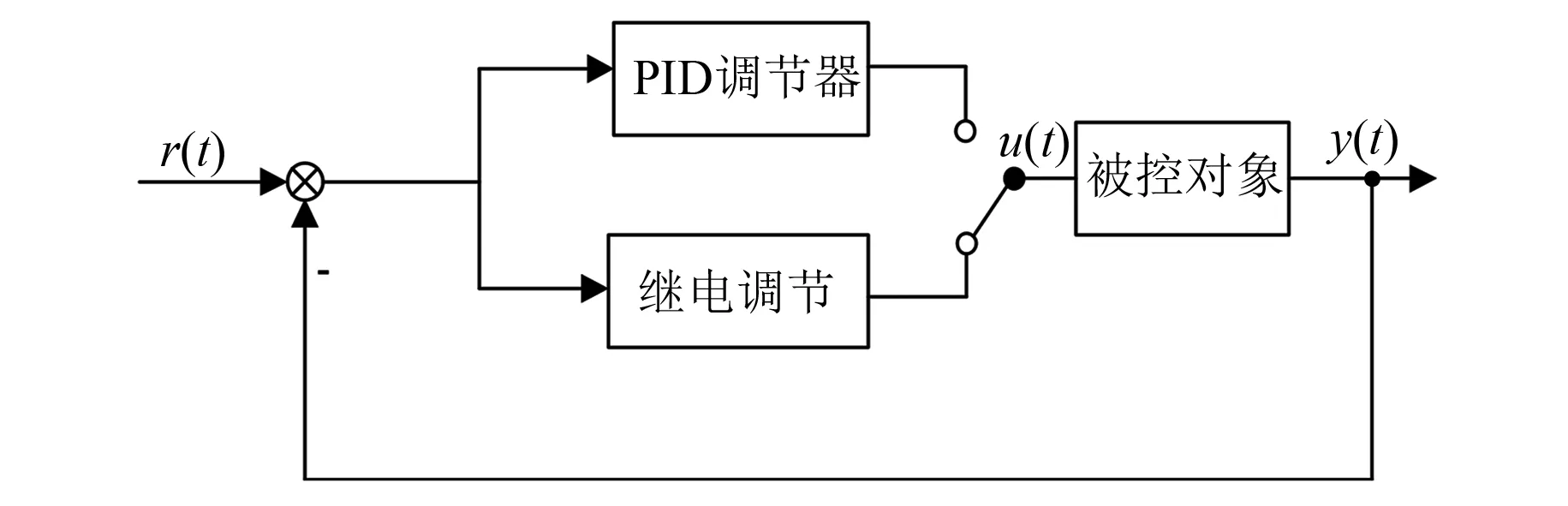
图1 继电反馈PID自整定控制结构图
图1中,r(t)为参考信号,目标值通常被设为0,e(t)为偏差,u(t)为被控对象的输入,y(t)为输出[11]。
测试模式下,系统的等效框图如图2所示,开始时输入u为d,当输出开始增加后,继电输出切换到相反的方向,即u=-d,因为相位延迟是-π,所以产生了一个周期为Tu的极限振荡[12]。

图2 继电反馈测试模式结构图
当系统处于等幅振荡时,非线性环节信号输入e(t)为正弦信号,非线性环节输出信号u(t)为周期方波信号,周期为Tu,其傅里叶级数展开式为
(1)
式中:A0为直流分量;An、Bn分别为基波及各次谐波分量的幅值。
分析可知,输出的信号为奇函数,则可推出直流分量系数与基波偶函数分量系数为0,即:
A0=A1=0
(2)
而基波奇函数分量系数为
(3)
可以得到该继电特性的描述函数为
(4)
由控制理论可知,产生等幅振荡的条件为
1+N(A)G(jω)=0
(5)
即可得:
argG(jω)=-π
(6)
(7)
式中:Ku为继电特性在传输幅度为A的正弦信号时的等价临界振荡比例增益。幅度A可根据振荡输出曲线进行计算。通过继电反馈试验可以获得对象的临界参数Ku和Tu,使用Z-N规则可以得到PID控制器的参数。
1.2 工业模型建立
工业控制中常用的模型为一阶惯性加滞后模型,可以简化为式(8)所示的最小模型传递函数:
(8)
式中:K表示稳态增益;τ表示时间延迟;T表示惯性时间。
因此,一阶惯性加滞后模型是描述工业系统的基本结构。
2 继电反馈仿真
为了验证继电反馈方法的可行性,本文针对一阶惯性加滞后环节的工业对象进行MATLAB仿真试验。搭建仿真模型如图3所示。
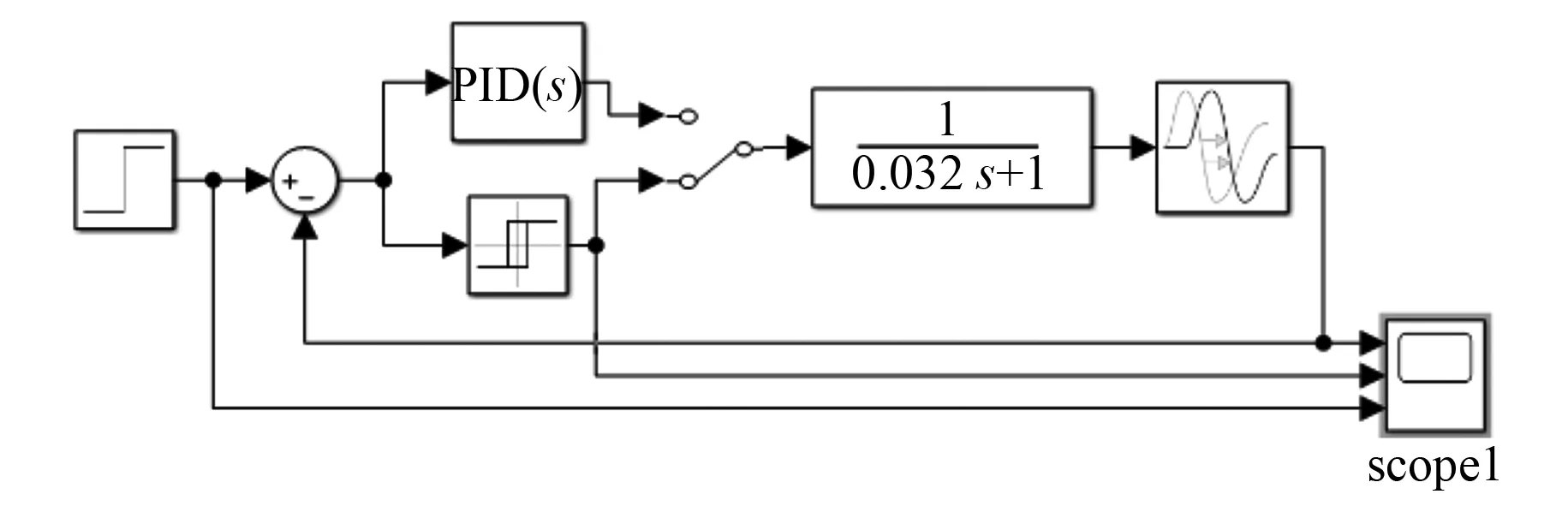
图3 继电反馈仿真图
当开关打到继电环节,系统进入测试状态,测试状态的作用是进行系统临界信息获取,通过继电器发出继电激励信号,从而由系统的响应曲线来计算出该系统的振荡频率和振荡幅值。
为获取临界参数Ku、Tu,进行继电反馈仿真试验,通过曲线可获取被控对象的振荡周期和继电环节的幅值。继电反馈仿真试验图如图4所示。

图4 继电反馈仿真试验图
根据频率点的幅值计算式计算出临界增益,从而得到被控过程的临界参数,即Ku和Tu,最终按照Z-N整定规则即可获得PID参数,如表1所示。

表1 PID控制器参数整定规则
将被控对象接入控制环节,输入表1的PID整定参数,得到整定曲线如图5所示。
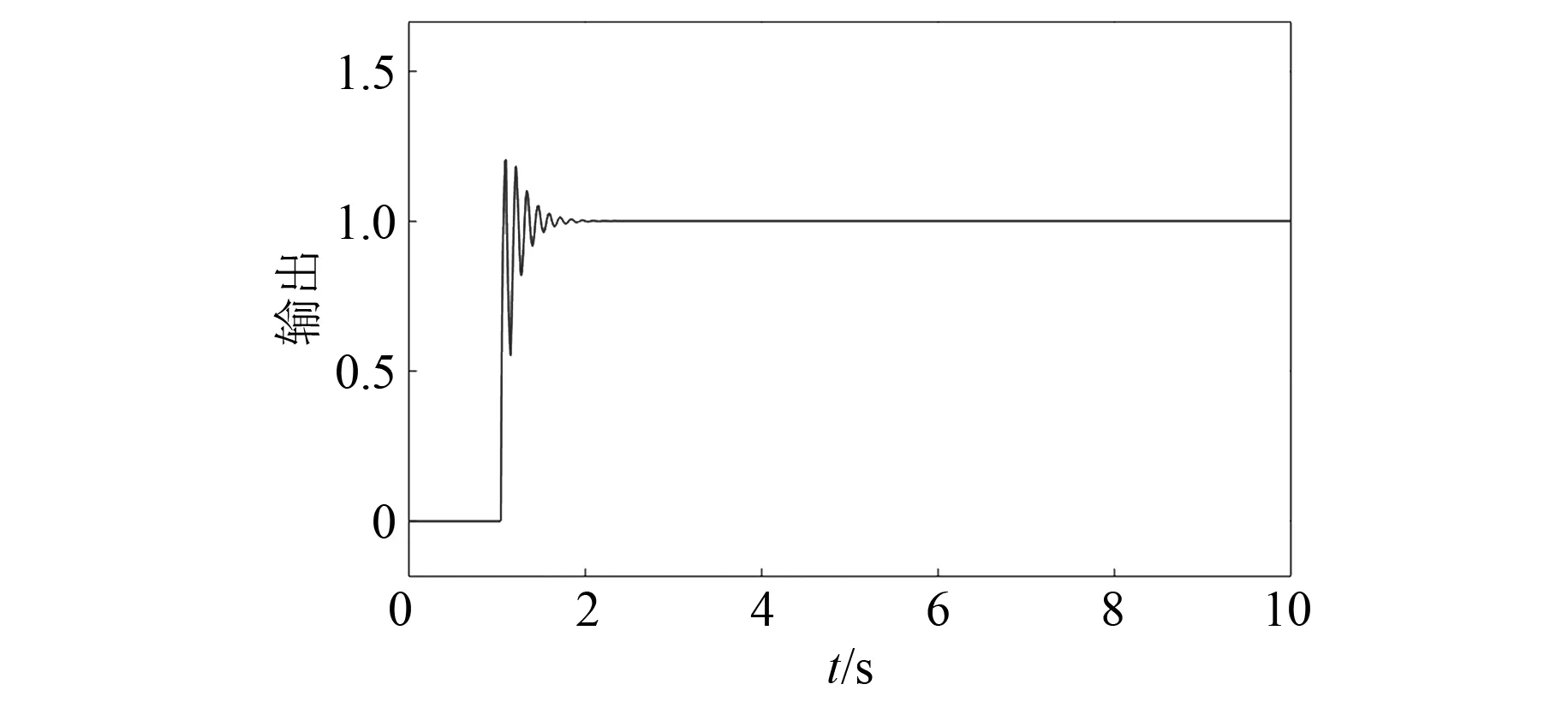
图5 被控对象阶跃响应曲线
由图5可知,基于Z-N整定方法获取的PID控制器参数具有较大的系统超调量和稳定时间,不能达到良好的控制效果。
3 仿真数据分析
3.1 函数关系仿真分析
通过继电振荡仿真曲线可得出临界增益Ku和振荡周期Tu。针对一对一的线性关系,分析Ku和Tu与被控对象的传递函数中T和τ之间的函数关系,具体分析如下。
被控对象在相同惯性时间、不同滞后时间的情况下,分别计算出Ku和Tu的值,当惯性时间T相同时,分别得出Ku和Tu与滞后时间τ之间的函数关系,如图6所示。
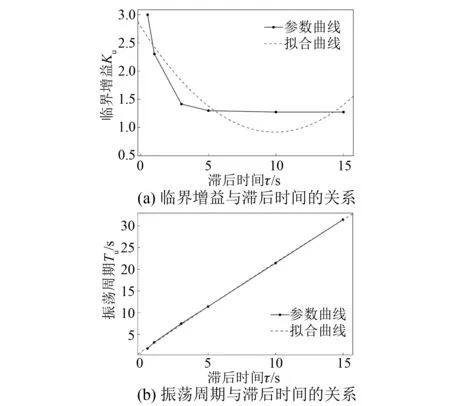
图6 临界增益、振荡周期与滞后时间的相关性
Ku和滞后时间τ之间的函数关系为
y=0.018 9x2-0.375 9x+2.786 5
(9)
Tu和滞后时间τ之间的函数关系为
y=2.029 6x+1.095 2
(10)
其中临界增益与滞后时间的拟合度参数为SSE=0.493,R2=0.812 8(SSE为拟合数据和原始数据对应点的误差平方和,R2为判定系数),振荡周期与滞后时间的拟合度参数为SSE=0.133 6,R2=0.999 8。由式(9)和式(10)的函数关系得出,在相同惯性时间、不同滞后时间的条件下,Tu与滞后时间τ的相关性较大,Ku与滞后时间τ的相关性不大。
被控对象在相同滞后时间、不同惯性时间的情况下,分别计算出Ku和Tu的值,当滞后时间τ相同时,分别得出Ku和Tu与惯性时间T之间的函数关系如图7所示。
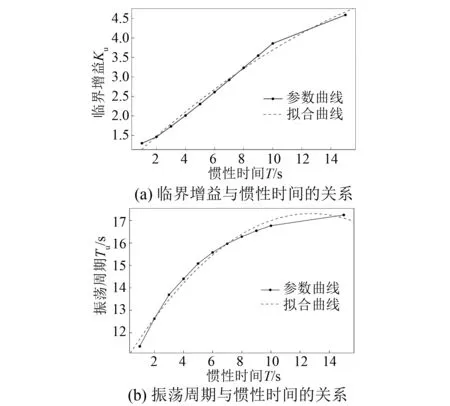
图7 临界增益、振荡周期与惯性时间的相关性
Ku和惯性时间T之间的函数关系为
y=-0.006 247x2+0.352x+0.795 4
(11)
Tu和惯性时间T之间的函数关系为
y=-0.040 23x2+1.027x+10.74
(12)
其中,临界增益和惯性时间的拟合度参数为SSE=0.097 19,R2=0.991 2,振荡周期和惯性时间的拟合度参数为SSE=0.380 2,R2=0.988 8。由式(11)和式(12)的函数关系得出:在相同滞后时间、不同惯性时间的条件下,Ku与惯性时间T的相关性较大,Tu与惯性时间T的相关性不大。且Ku、Tu与T、τ存在着某种函数关系,即T=f(Ku,Tu),τ=f(Ku,Tu)。
3.2 临界参数分析
通过在MATLAB中进行继电测试,得出临界参数。以下为在不同系统下得出其对应的临界参数。
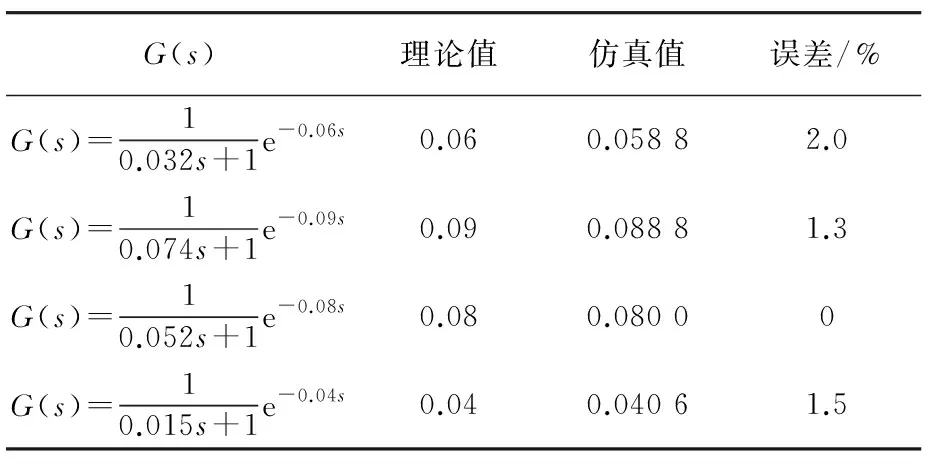
对于超快速系统,取0.01 s T=[0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1], τ=[0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1]。 分别对应取值,即可得81组数据,如表2所示。 表2 试验数据表 由继电反馈试验获取各自传递函数分别对应的Ku和Tu,并将这81组数据进行拟合,以Ku和Tu作为自变量,以T和τ作为因变量的函数关系。 Ku和Tu与时间常数T的函数关系如下: f=-0.119 7+0.130 8x+8.13y-0.001 33x2- 9.937xy-66.16y2-0.031 58x3+3.942x2y+ 70.44xy2+158.3y3+0.005 775x4- 0.253 2x3y-28.16x2y2-83.57xy3-242.1y4- 0.000 267x5-0.005 152x4y+1.554x3y2+ 45.83x2y3-155.4xy4+655.1y5 (13) 对以上函数关系选取此范围内的非样本数据进行验证。首先通过继电振荡得出Ku和Tu,然后输入至式(13)得出理论惯性时间与仿真的惯性时间之间的误差,如表3所示。 表3 惯性时间误差分析表 由表3可知,该函数关系在超快速系统下,得到的仿真惯性时间与传递函数G(s)理论惯性时间之间的误差均在3%以下,由此得出,该函数关系能较为准确地得到被控对象传递函数中的惯性时间。 Ku和Tu与滞后时间τ的函数关系如下: (14) 对以上函数关系选取此范围内的非样本数据进行验证。通过继电振荡得出Ku和Tu,输入至式(14)得出理论滞后时间与仿真滞后时间之间的误差,如表4所示。 表4 滞后时间误差分析表 由表4可知,该函数关系在超快速系统下的仿真滞后时间与传递函数G(s)理论滞后时间之间的误差均在2%以下,由此得出,该函数关系能较为准确地得到被控对象传递函数中的滞后时间。 本文以超快速系统为例进行展开分析,从上面的仿真研究可以得到如表3、表4所示的特征参数的值,并给出其与理论值之间的误差。数据表明,在超快速系统下,得到的特征参数值与理论参数值的误差均在3%以下,可以看出该理论方法能有效且准确地得出被控对象的特征参数。对于其余情况下的系统,同以上分析方法,可分别得出各自系统对应的求参式。 针对被控对象特征参数未知、控制效果不稳定等缺点,本文通过对典型一阶惯性纯滞后环节进行继电反馈试验,提出了具体的获取被控对象传递函数中特征参数的表达式。由该表达式得出系统重要的特征参数。利用这些特征参数,选取最优的整定规则或者方法,从而快速对系统进行整定。大量仿真数据表明,该表达式能以较小的误差计算出控制系统的特征参数。

3.3 仿真结果
4 结 语
