永磁同步电机直接转矩控制与模型预测转矩控制比较研究*
2021-08-10李耀华刘子焜刘东梅陈桂鑫王孝宇
李耀华, 刘子焜, 刘东梅, 陈桂鑫, 王孝宇, 任 超
(长安大学 汽车学院,陕西 西安 710064)
0 引 言
永磁同步电机(PMSM)因其高效率、高功率密度、高功率因数等优势,在新能源汽车、高铁牵引等领域得到广泛应用[1-2]。矢量控制作为交流电机经典控制理论在PMSM领域应用较为成熟,但其需要连续转子位置信息和旋转坐标变换[3-4]。基于静止坐标系的DTC技术采用滞环比较器,通过开关表确定电压矢量,无需坐标变换,结构简单,易于实现,在PMSM领域也得到了广泛应用[5-8]。近年来,随着微处理器计算能力的提升,以成本函数为评价指标,将逆变器所有开关状态遍历代入至电机预测模型,从中选择控制效果最优的开关状态有限状态集模型预测控制在PMSM控制领域受到关注[9-15]。PMSM模型预测控制可基于转子旋转坐标系,也可以基于定子坐标系实现,前者与矢量控制相同,需要坐标变换和转子位置,后者则需要转矩角实时信息;被控对象可以为定子电流分量,也可以为磁链和转矩,前者的成本函数无需权重系数,后者需要设计和调整权重系数[16-22]。
PMSM DTC和基于定子坐标系的模型预测转矩控制(MPTC)均以磁链和转矩作为被控对象,采用逆变器生成的电压矢量作为控制变量,具有一定的共性。本文从控制性能、平均开关频率和参数鲁棒性等方面对这2种策略进行比较研究。针对MPTC开关频率不恒定的问题,提出开关频率固定的PMSM MPTC策略,可将开关频率固定为采样频率的1/3,且将备选开关状态减小为3个,从而优化系统实时性。
1 PMSM DTC
定子坐标系下,表面式PMSM转矩方程如下:
(1)
式中:Te为电机转矩;p为电机极对数;ψs为定子磁链幅值;ψf为永磁体磁链;Ld和Lq为电机d轴和q轴电感,两者相等;δ为定转子磁链的夹角,即为转矩角。
PMSM DTC原理即通过施加电压矢量改变转矩角,从而改变电机转矩。DTC根据电压矢量对定子磁链和转矩角的增减效果,采用开关表来选择电压矢量以实现对磁链和转矩的控制。因此,DTC本质上是一种定性控制,只考虑施加电压矢量增大或减小,控制方式简单粗放。
静止坐标系下,PMSM转矩、定子磁链幅值及定子磁链角位置如下:

(2)

(3)
(4)

(5)
式中:ψα和ψβ为定子磁链α轴和β轴分量;iα和iβ为定子电流α轴和β轴分量;Uα和Uβ为施加电压矢量α轴和β轴分量;Rs为定子电阻;∠ψs为定子磁链角位置。
由于永磁体的存在,PMSM定子磁链初始值不为零,由永磁体和转子初始位置决定:
(6)
式中:ψα0和ψβ0为定子磁链α轴和β轴初始值分量;θr0为静止坐标系下转子磁链角位置。
因此,PMSM DTC虽然不需要连续转子位置信息和旋转坐标变换,但需要转子初始位置信息以确定定子磁链积分的初始值[23]。
将定子磁链角位置划分为6个扇区,如式(7)所示。在一个定子磁链扇区内,始终同时满足磁链和转矩增减组合控制要求的非零电压矢量唯一。

(7)
基于不同扇区下电压矢量对磁链和转矩的增减控制效果,PMSM DTC开关表如表1所示,其中φ和τ的值由磁链和转矩滞环比较器决定,1表示需增加,0表示需减小[24]。

表1 PMSM DTC开关表


图1 DTC系统
由图1可知,PMSM DTC为定性控制。由开关表确定的电压矢量可满足对磁链和转矩的增减控制要求。由于下一时刻的开关切换次数由当前时刻系统状态确定,开关频率不恒定。
2 基于定子坐标系的MPTC
定子磁链坐标系下,表面式PMSM定子磁链和转矩预测模型如下:

(8)

(9)
式中:ψs(k)、Te(k)和Us(k)为当前时刻的定子磁链、转矩和施加的电压矢量;ψs(k+1)和Te(k+1)分别为下一时刻的转矩和定子磁链预测值;α为施加电压矢量与定子磁链的夹角;δ(k)为当前时刻的转矩角;Δt为采样周期[25-26]。
MPTC使用逆变器产生的全部电压矢量:
Us∈{U0,U1,U2,U3,U4,U5,U6,U7}
(10)
式中:U0和U7均为零电压矢量,由000和111 2个开关状态产生,具体以开关次数最小原则选择[27]。
MPTC的成本函数g如下:

(11)

基于定子坐标系的PMSM MPTC系统如图2所示。
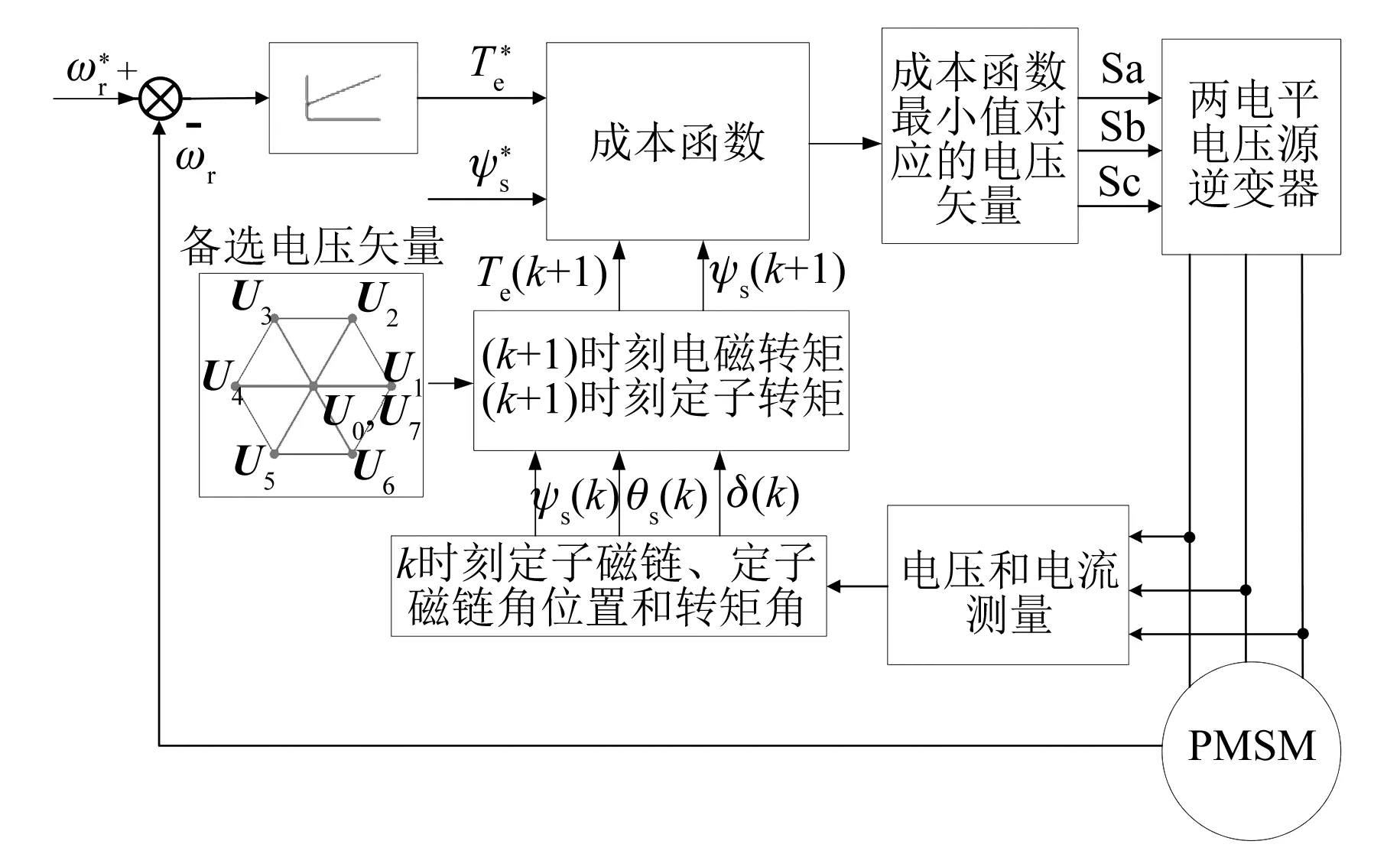
图2 基于定子坐标系PMSM MPTC系统
由图2可知,MPTC采用成本函数对电压矢量控制效果定量评价,并选择控制效果最优的电压矢量。因此,MPTC并不一定满足对磁链和转矩的定性控制要求。与DTC类似,MPTC系统每一采样时刻的开关切换次数并不固定,开关频率也不恒定。
3 仿真对比
基于MATLAB/Simulink建立表面式PMSM DTC和MPTC仿真模型。仿真模型为离散模型,采样周期为50 μs。直流母线电压为312 V,转速PI调节器KP=5,KI=100,输出上下限为[-30 N·m,30 N·m]。仿真用表面式PMSM参数如表2所示。
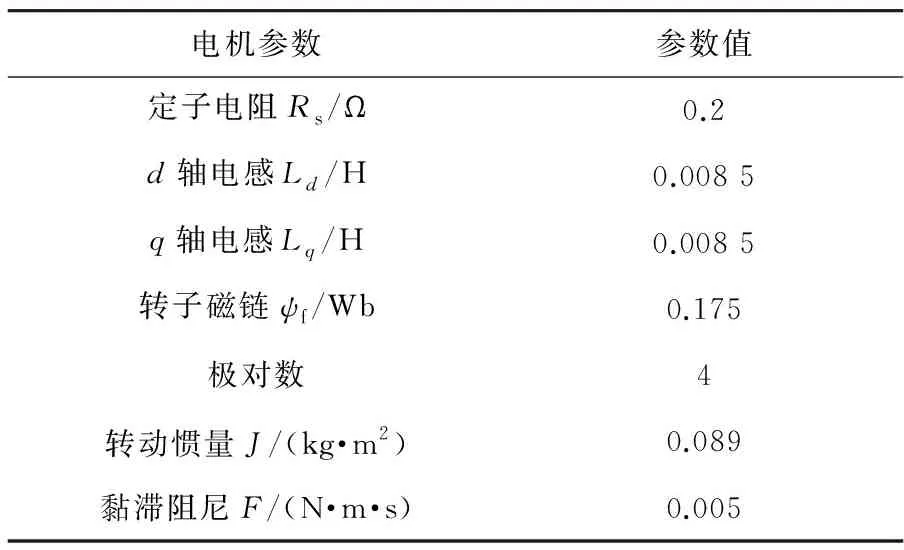
表2 仿真用表面式PMSM参数
3.1 四象限运行
参考转速初始为500 r/min,2 s时阶跃至-500 r/min。负载转矩初始为10 N·m,1 s时阶跃至-10 N·m,3 s时阶跃至10 N·m。参考定子磁链幅值为0.3 Wb。仿真时长为4 s。PMSM DTC和MPTC仿真波形如图3~图8所示。

图3 DTC下电机转速

图4 DTC下电机转矩

图5 DTC下定子磁链幅值

图6 MPTC下电机转速

图7 MPTC下电机转矩

图8 MPTC下定子磁链幅值
定义转矩脉动均方根误差(RMSE)和磁链脉动均方根误差如下:
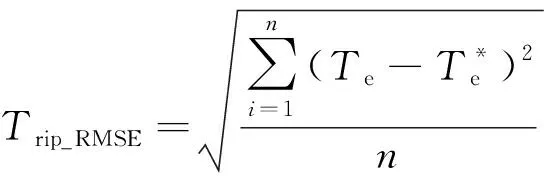
(12)

(13)
式中:n为采样个数。
不同策略下,电机系统控制性能如表3所示。

表3 电机系统控制性能
由仿真结果可知,DTC和MPTC均可使电机四象限运行。与DTC相比,模型预测控制转矩脉动误差和磁链脉动误差更小。转矩动态变化下,DTC选择的电压矢量兼顾磁链和转矩控制,MPTC更偏重转矩控制,导致磁链有较大的波动。
对DTC系统,并行运行MPTC。相同条件下,DTC选择的电压矢量在MPTC的排序如表4所示。

表4 DTC选择电压矢量在MPTC排序
由表4可知,DTC选择的电压矢量在MPTC中各个排序位置的占比逐级递减,作为MPTC的最优或次优电压矢量情况占比达到68.29%,这也是MPTC性能优于DTC的原因。当磁链或转矩误差较小时,虽然DTC选择的电压矢量正确增减磁链或转矩,但由于电压矢量作用时间固定,控制效果反而不佳,造成更大的脉动,从而使有时成本函数排序较靠后,甚至排序处于第6位或第7位。
3.2 平均开关频率
定义平均开关频率如下:

(14)
式中:Nswitching为开关次数;t为仿真时间。
设定参考转速和参考转矩为不同的稳定值及上文的复合仿真工况,仿真时长均为4 s。电机系统平均开关频率如表5所示。
由表5可知,直接转矩的平均开关频率要低于MPTC。经统计,在复合工况,DTC系统有40 764个采样时刻选择与上一时刻相同的电压矢量,开关切换次数为0,MPTC系统仅有 24 111个采样时刻选择的压矢量与上一时刻相同。因此,DTC的平均开关频率更低。由于两者开关频率不恒定,不同工况下的平均开关频率也有所不同。

表5 电机系统平均开关频率
3.3 参数失配鲁棒性
DTC与MPTC均需要磁链和转矩计算模型,对电机系统参数有较强依赖性。由于测量误差和参数时变特性,势必会造成模型参数失配,影响控制效果[28-34]。基于上文仿真模型,预测模型参数不变,分别将电机定子电阻、定子电感和永磁体磁链设定为原参数的0.5倍和2倍。设定参考转速为100 r/min,负载转矩为10 N·m。仿真时长为4 s。DTC与MPTC下,电机系统控制性能如表6所示。
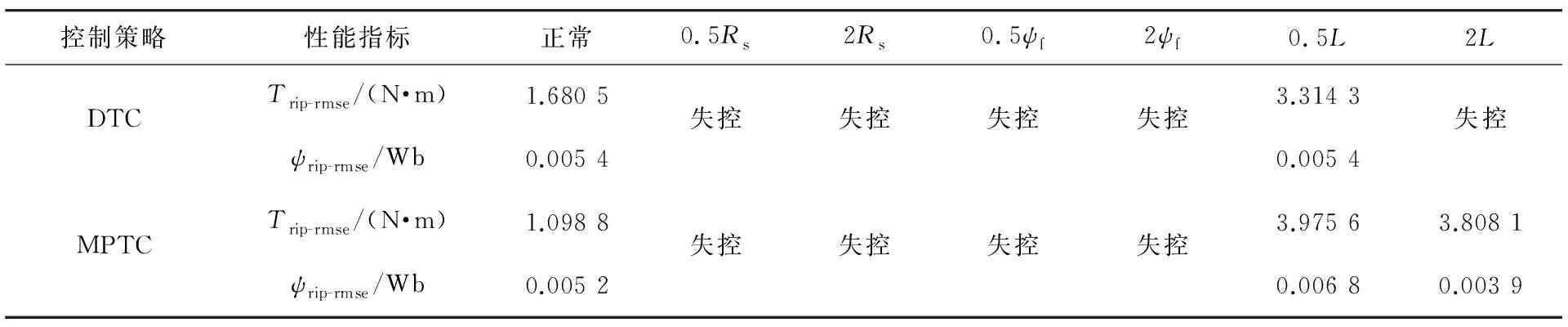
表6 电机系统控制性能
仿真结果表明:DTC和MPTC对定子电阻和磁链参数失配敏感。定子电感变大会使DTC失控,使MPTC转矩脉动增大。定子电感变小,DTC和MPTC转矩脉动增大,磁链影响较小。
4 开关频率固定的MPTC
由上文可知,DTC和传统MPTC存在开关频率不恒定的共性问题。基于模型预测控制具有柔性控制的特点,这里提出一种开关频率固定的MPTC。逆变器开关频率固定即每一时刻的开关切换次数为固定值。逆变器的开关切换次数为0次、2次、4次或6次。为了减小开关损耗,开关切换次数越小越好,但如果设定为0次,则将始终保持初始开关状态,系统失控。因此,设定开关切换次数为2次。以开关切换次数2次为原则,PMSM MPTC的备选开关状态如表7所示。
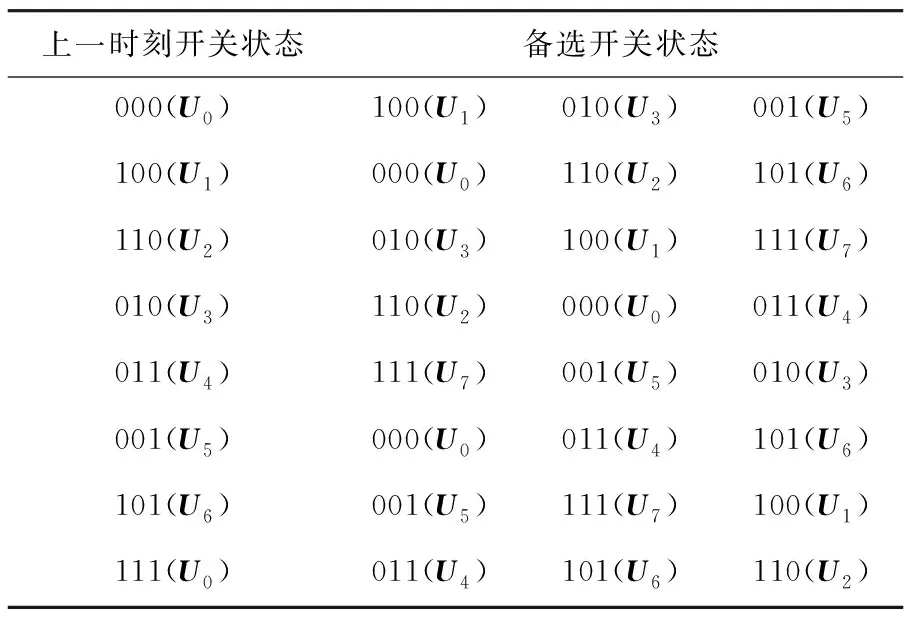
表7 备选开关状态
由表7可知,此时MPTC可用的备选开关状态为3个,确保每次采样周期的开关切换次数为2次,同时与使用7个备选开关状态的传统MPTC相比,只需3次遍历预测计算,实时性得到优化。开关频率固定的PMSM MPTC系统如图9所示。
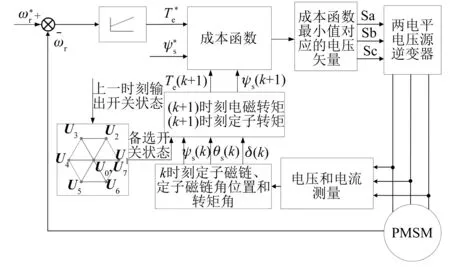
图9 开关频率固定的PMSM MPTC系统
在与上文相同的复合工况仿真条件下,开关频率固定的PMSM MPTC系统仿真波形如图10~图12所示。
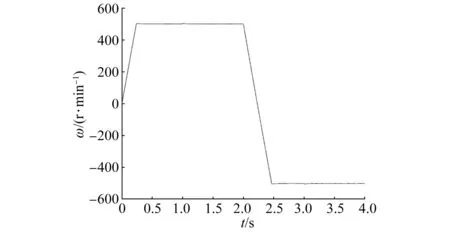
图10 开关频率固定MPTC电机转速

图11 开关频率固定MPTC电机转矩
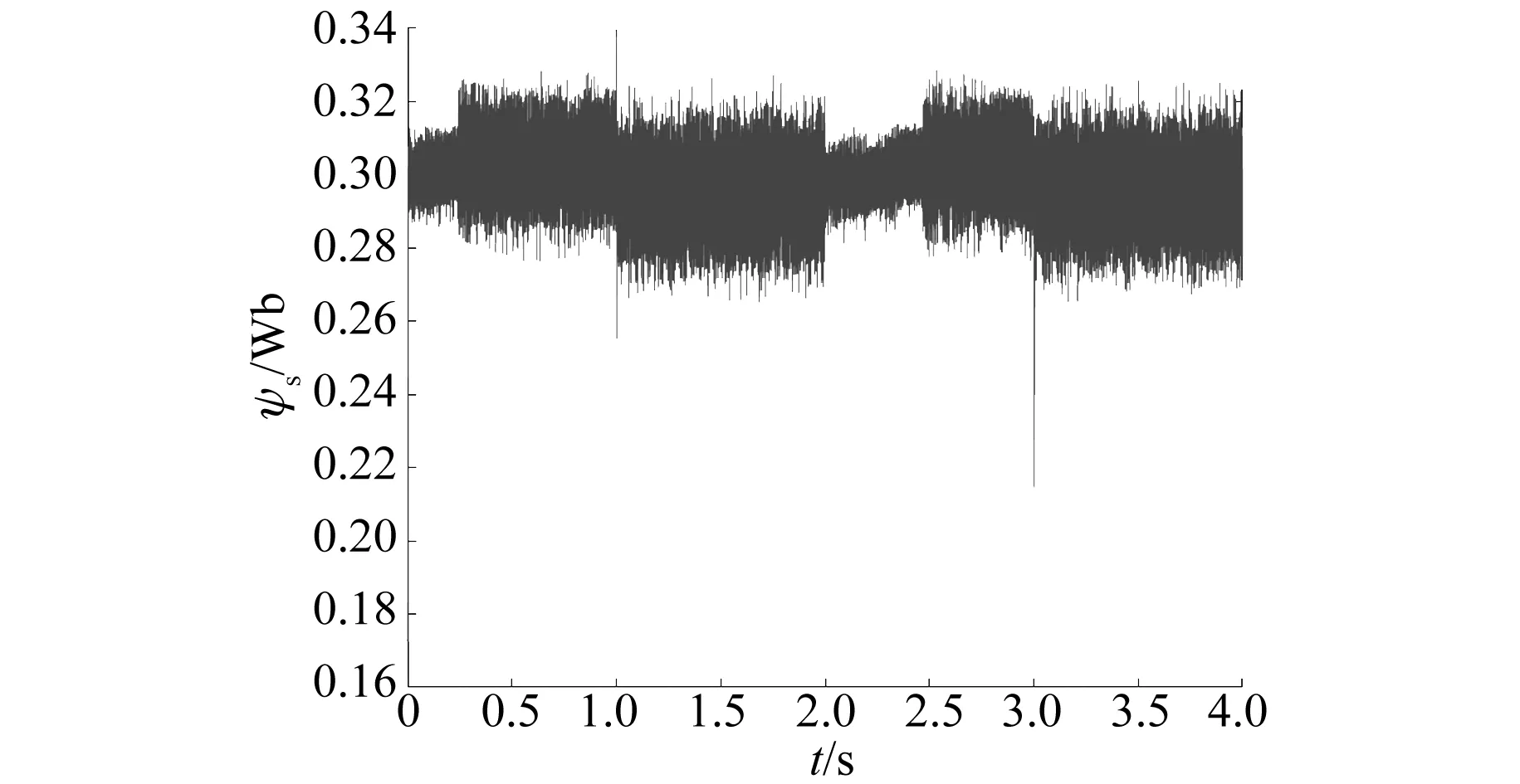
图12 开关频率固定MPTC定子磁链幅值
开关频率固定的PMSM MPTC系统控制性能如表8所示。

表8 电机系统控制性能
仿真结果表明,开关频率固定的PMSM MPTC系统可正常运行。由于备选开关状态有所减小,转矩和磁链脉动较传统MPTC有所增大,平均开关频率有所增大,但此时开关频率固定为采样频率的1/3。
对开关频率固定的PMSM MPTC系统,并行运行传统MPTC。相同条件下,开关频率固定的MPTC系统选择的电压矢量在传统MPTC的排序如表9所示。
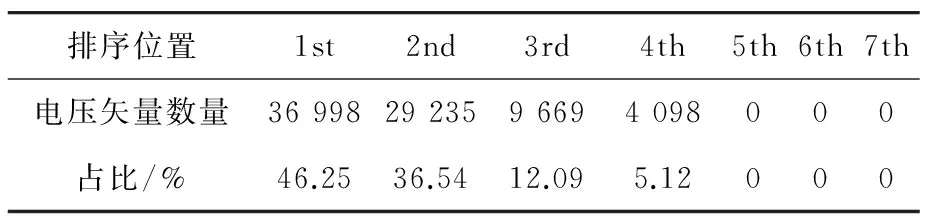
表9 开关频率固定MPTC系统电压矢量排序
由表9可知,开关频率固定的MPTC系统选择的电压矢量作为MPTC的最优或次优电压矢量情况占比达到82.79%,表明选择的电压矢量质量较好。
5 结 语
基于PMSM DTC和MPTC比较结果,得出结论如下:
(1) PMSM DTC和基于定子坐标系MPTC均可实现四象限运行,电机运行良好。
(2) PMSM DTC为定性控制,简单粗放,所选择的电压矢量并不一定是最优电压矢量,转矩脉动和磁链脉动较大,但结构简单,易于实现,且平均开关频率较低。
(3) PMSM MPTC采用成本函数对电压矢量控制效果定量评价,选择控制效果最优的电压矢量,所选电压矢量并不一定满足对磁链和转矩的增减控制。与DTC相比,需要遍历所有电压矢量,计算量较大,实时性差。
(4) 定子电阻和永磁体磁链参数失配下,PMSM DTC和模型预测控制鲁棒性均较差。DTC在电感参数增加时失控,电感参数减小时转矩波动较大,MPTC在电感参数失配时,也有较大的转矩脉动。
(5) DTC和传统MPTC的开关频率均不固定。由于MPTC灵活,可通过设定备选开关状态,固定模型预测转矩开关频率。本文提出开关频率固定的PMSM MPTC策略,可将每个采样周期开关切换次数固定为2次。仿真结果表明:该方法可使开关频率固定为采样频率的1/3,且将备选开关状态减小为3个,实时性得到优化。
