城际动车组四象限整流器控制策略研究与应用
2021-08-10杨春宇岳学磊相里燕妮
杨春宇, 岳学磊, 相里燕妮, 高 闯
(西安中车永电捷通电气有限公司 技术中心,陕西 西安 710016)
0 引 言
在城际动车组的牵引电传动系统中,单相四象限整流器作为AC/DC转换装置,作用是稳定牵引变流器直流侧电压和网侧单位功率因数,是牵引电传动系统的重要环节[1-2]。
单相四象限整流器的控制方法主要分为2种:间接电流控制方法(即“幅相电流控制”)和直接电流控制方法。间接电流控制方法是通过控制整流器的输入侧电压,使其和网侧电压保持一定的幅值和相位,进而间接控制其网侧电流,使用稳定系统的状态量作为控制量,未考虑暂态过程对系统状态量的影响,因此系统的稳定性较差,响应较慢。直接电流控制方法是通过对网侧电流直接控制,使其跟踪给定电流信号的控制方法。直接电流控制方法使用电流闭环,可以使电流快速跟踪参考电流,系统具有较好的动态性能[3-4]。
文献[5]研究了四象限整流器常用的5种控制方法,并通过仿真手段对各种控制策略的控制性能进行对比分析,结果表明, 预测电流控制和瞬态电流控制可以达到直流侧电压稳定、网侧电流谐波小、网侧单位功率因数适当等控制目标。文献[6]通过分析标准动车组四象限整流器电路拓扑结构和四象限控制器,建立了整车四象限整流器及控制系统数学模型。对由其形成的闭环系统进行了实时仿真研究,结果验证了所建四象限整流器及控制系统的正确性。
本文采用电压外环和电流内环的控制策略,分别以直流侧给定电压、网侧给定电流为控制对象,对直流侧电压和网侧电流进行无差、准确控制,实现了网侧电压、电流正弦性好,直流侧电压稳定、波动较小的控制目标。
1 四象限整流器数学模型
单相两电平整流器主电路如图1所示。其中,i,u分别为变压器二次侧输出电流和空载电压,uab为整流器输入电压,L为变压器二次侧电感,Cac为交流侧滤波电容,Cdc为直流侧支撑电容,RL为整流器侧等效负载。当dq坐标系的起始位置与αβ坐标系重合时,有θ=ωt。

图1 单相四象限整流器主电路图
设ω为网侧电压基波角频率,um、im、uabm分别为网侧电压、网侧电流、整流器输入电压的基波幅值,φ为变压器二次侧输出电流的初始相位角,φab为整流器输入电压的初始相位角,则网侧电压与电流的基波分量以及uab的基波分量可分别表示为
u=umsin(ωt)
(1)
i=imsin(ωt+φ)=idsin(ωt)-iqcos(ωt)
(2)
uab=uabmsin(ωt+φab)=udsin(ωt)+uqcos(ωt)
(3)
式中:id、iq分别为dq坐标系下的d轴电流和q轴电流,id=imcosφ,iq=imsinφ;ud、uq分别为dq坐标系下的d轴电流和q轴电压,ud=uabmcosφab,uq=uabmsinφab。
根据基尔霍夫电压定律(KVL),可得:

(4)
将式(1)~式(3)代入式(4),可得四象限整流器在dq坐标系下的数学模型为
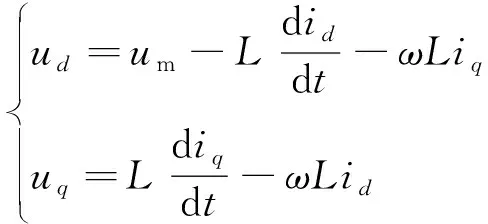
(6)
为实现d、q轴电流的准确跟踪控制,以电流PI控制器代替式(5)中的电流微分,则式(5)可变为

(6)

式(6)为电流前馈解耦控制算法。由式(6)计算得到ud和uq后,经逆Park坐标变换得到静止坐标系下的电压,进而得到调制信号。
2 四象限整流控制算法
2.1 SOGI算法
二阶广义积分(SOGI)算法结构框图如图2所示。

图2 SOGI算法框图
根据SOGI算法框图,可得其输出与输入的关系式

(7)

(8)
由式(7)和式(8)可知,SOGI算法本质为一个二阶带通滤波器(BPF)与一个二阶低通滤波器(LPF)所构成的正交对。
2.2 αβ轴电压估计
变压器二次侧空载电压u经过SOGI算法,可得静止坐标系下的电压分量uα和uβ,其框图如图3所示。

图3 SOGI算法估计αβ轴电压


(9)

(10)
2.3 αβ轴电流估计
αβ轴电流估计算法仍采用SOGI,其框图如图4所示。

图4 SOGI算法估计αβ轴电流
图4中估计αβ轴电流所用SOGI的实现方法与电压估计所用的SOGI算法一致,不同之处在于此处iα直接用实际值而不用经过SOGI获得,目的是提高动态响应速度。
2.4 两电平整流器直流外环电压控制
直流侧电压采用PI控制器进行调节,输出经过陷波器以滤除直流侧二倍脉动引起的给定电流波动,其框图如图5所示。

图5 直流侧电压调节框图
其中陷波器采用二阶巴特沃斯陷波器,其传递函数为

(11)
2.5 整流器控制框图
综上,可以得到单相四象限整流器控制算法框图,如图6所示。
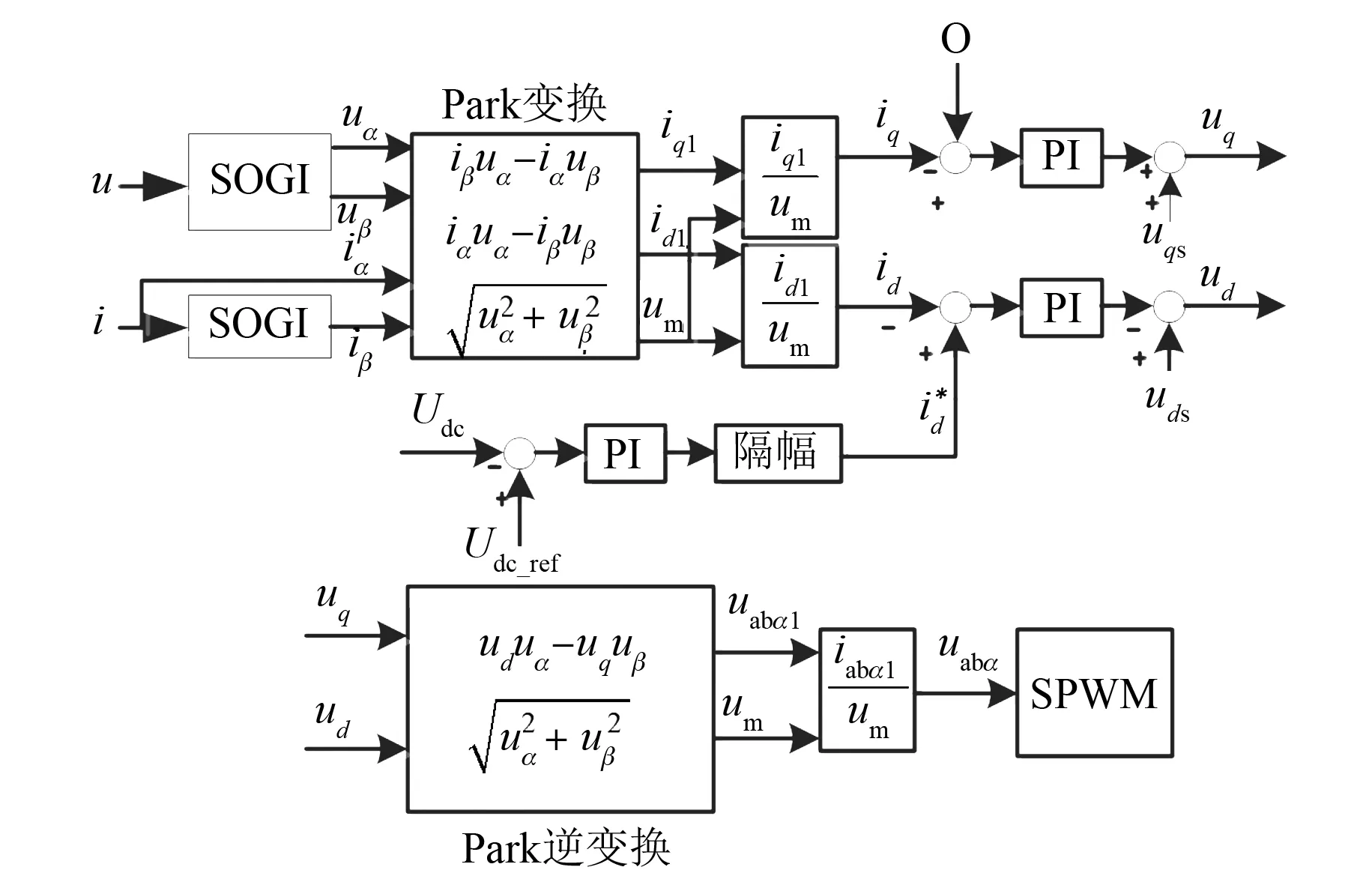
图6 单相四象限整流器控制算法框图
3 四象限整流起动过程
(1) 第1阶段。首先接通预充电电阻,直流侧电压充电达到稳定状态,此时切除预充电电阻,进入第2阶段。
(2) 第2阶段。切除预充电电阻后,经过一段预设时间的充电,系统充电达到稳定,且此时的网侧电压峰值达到了预设值。2个条件同时满足后,系统解除脉冲封锁,从预充电过程过渡到脉冲整流过程。
4 Simulink仿真与试验结果
4.1 Simulink仿真结果
为验证仿真状态下,四象限整流控制策略在整流+牵引逆变系统中的性能,在Simulink仿真环境下,搭建基于单相四象限整流+牵引逆变控制系统的仿真模型,进行仿真测试。仿真使用的四象限整流系统参数如表1所示。

表1 单相四象限整流系统参数
四象限整流系统空载起动的网侧电压与电流波形、直流侧电压波形如图7、图8所示。可以看出,从预充电过程(1 s之前)过渡到脉冲整流(1 s之后)过程中,直流侧电压超调量较小,最终稳定在1 800 V左右。
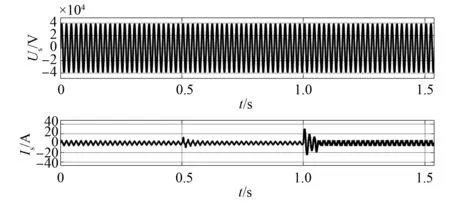
图7 四象限整流起动时的网侧电压及网侧电流波形
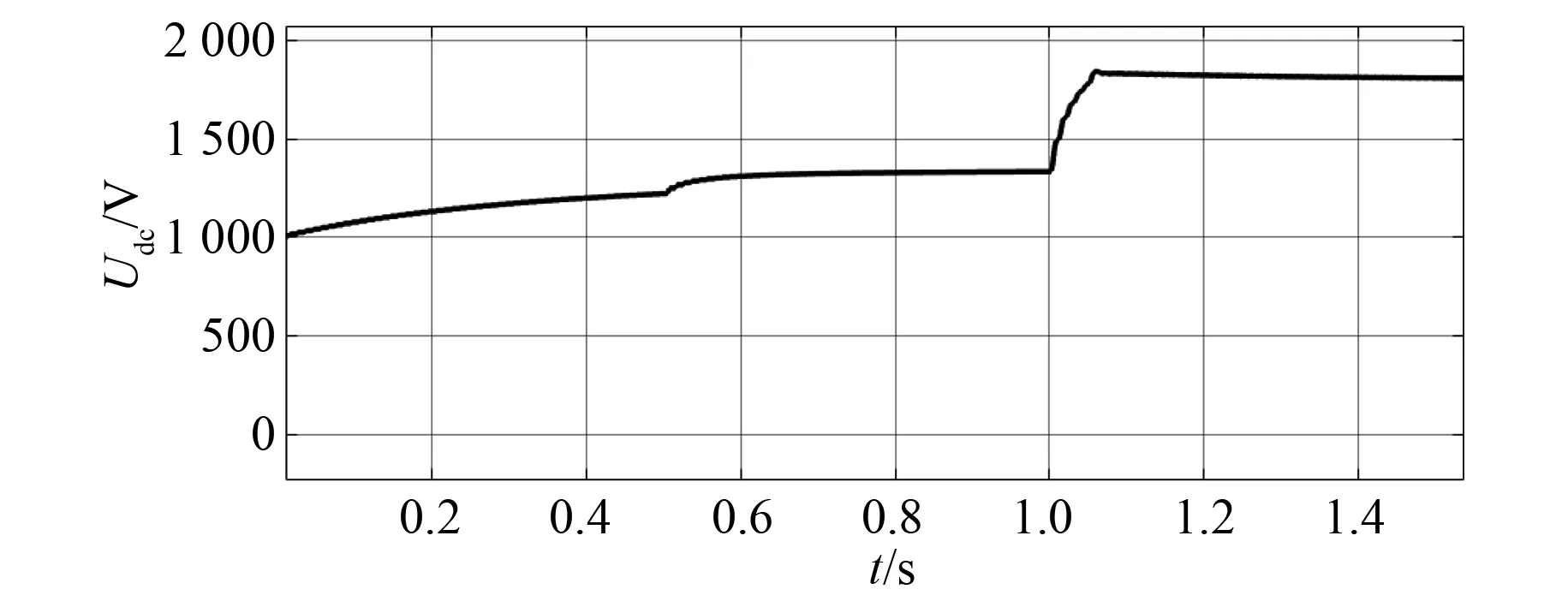
图8 四象限整流起动时的直流侧电压波形
牵引工况下,四象限整流系统的网侧电压与电流波形、直流侧电压波形如图9、图10所示。可以看出,网侧电压和网侧电流同相位、波形正弦性好,直流侧电压稳定在1 800 V左右,波动较小(峰峰值20 V左右)。
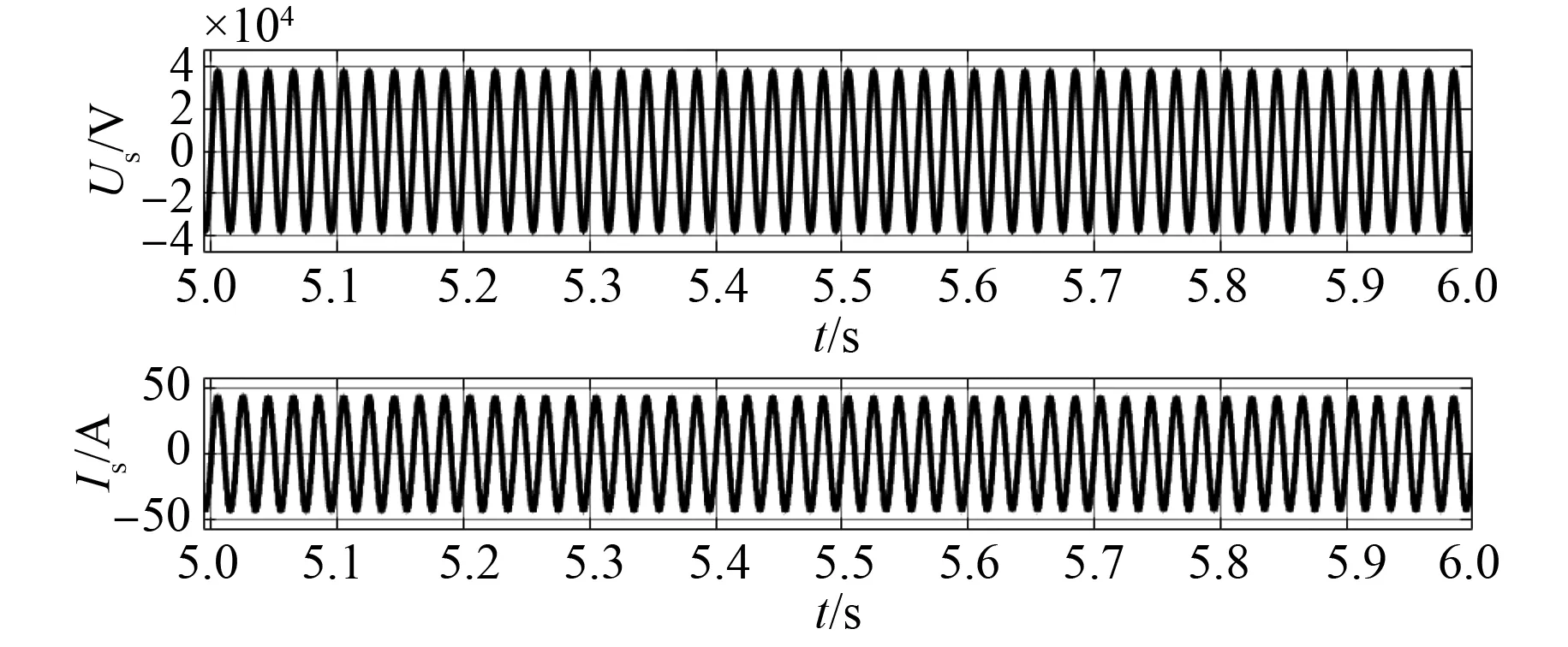
图9 牵引工况下的网侧电压及网侧电流波形

图10 牵引工况下的直流侧电压波形

图11 制动工况下的网侧电压及网侧电流波形
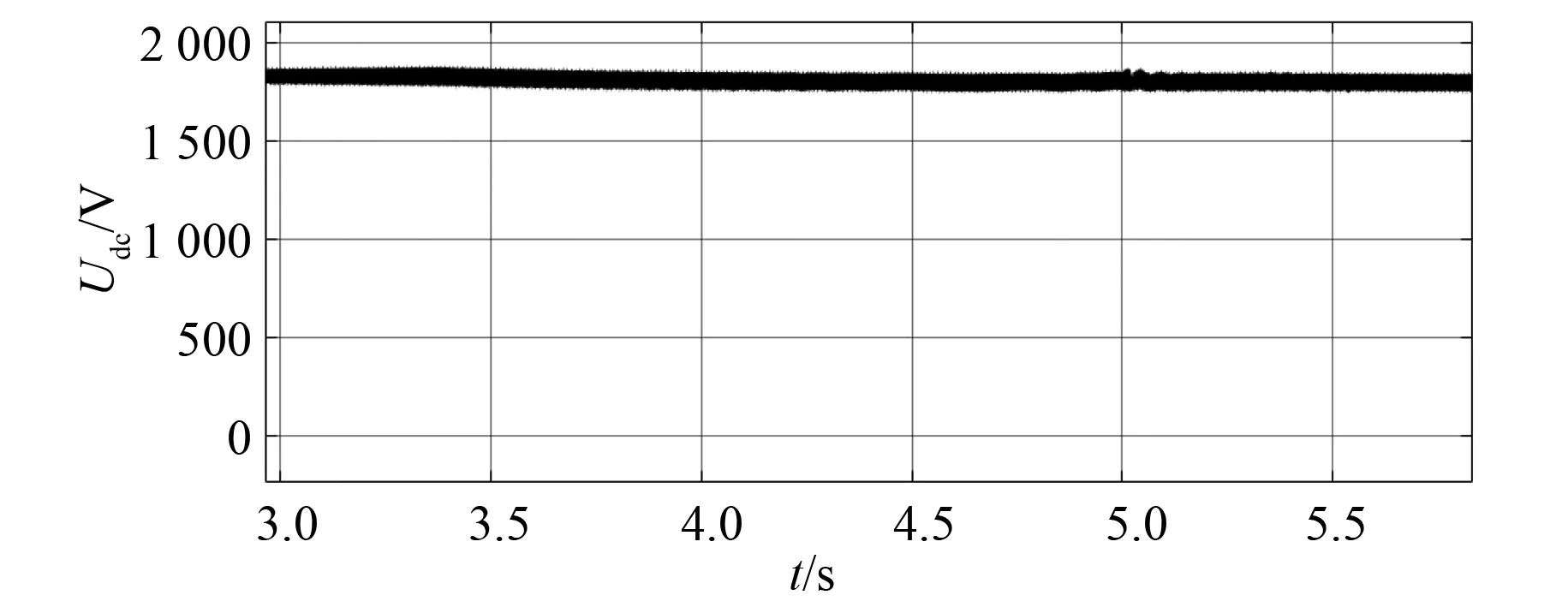
图12 制动工况下的直流侧电压波形
制动工况下,四象限整流系统的网侧电压与电流波形、直流侧电压波形如图11、图12所示。可以看出,网侧电压相位比网侧电流超前180°,波形正弦性好,直流侧电压稳定在1 800 V左右,波动较小(峰峰值50 V左右)。
4.2 组合试验结果
为验证四象限整流控制策略在四象限整流+牵引逆变系统中的性能,在中车大连电力牵引研发中心有限公司试验中心进行组合试验,试验参数与仿真参数一致。图13为试验所用的四象限整流+牵引逆变一体牵引变流器。

图13 试验所用的四象限整流+牵引逆变一体变流器
四象限整流系统空载起动波形如图14所示,从上到下分别是网侧电压、网侧电流和直流侧电压。可以看出,从预充电过程过渡到脉冲整流过程中,直流侧电压超调量较小,最终稳定在1 800 V左右。
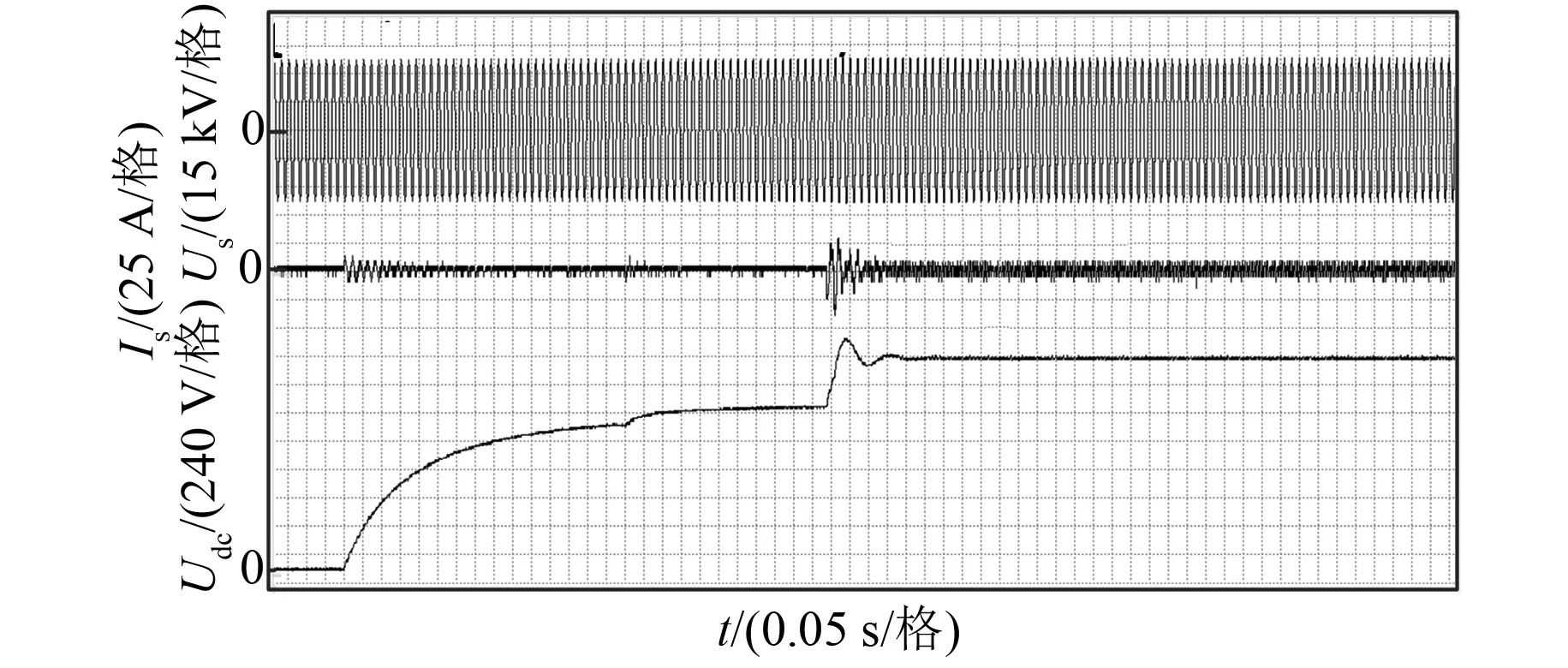
图14 四象限整流空载起动时的试验波形
牵引工况下的试验波形如图15所示,从上到下分别是网侧电压、网侧电流和直流侧电压。从图中可以看出,网侧电压和网侧电流同相位、波形正弦性好,直流侧电压稳定在1 800 V左右,波动较小(峰峰值50 V左右)。
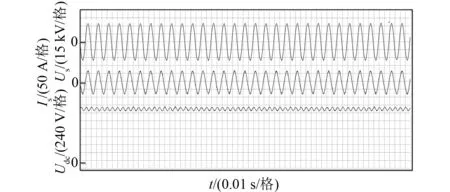
图15 牵引工况下的试验波形
制动工况下的试验波形如图16所示,从上到下分别是网侧电压、网侧电流和直流侧电压。可以看出,网侧电压相位比网侧电流超前180°,波形正弦性好,直流侧电压稳定在1 800 V左右,波动较小(峰峰值50 V左右)。
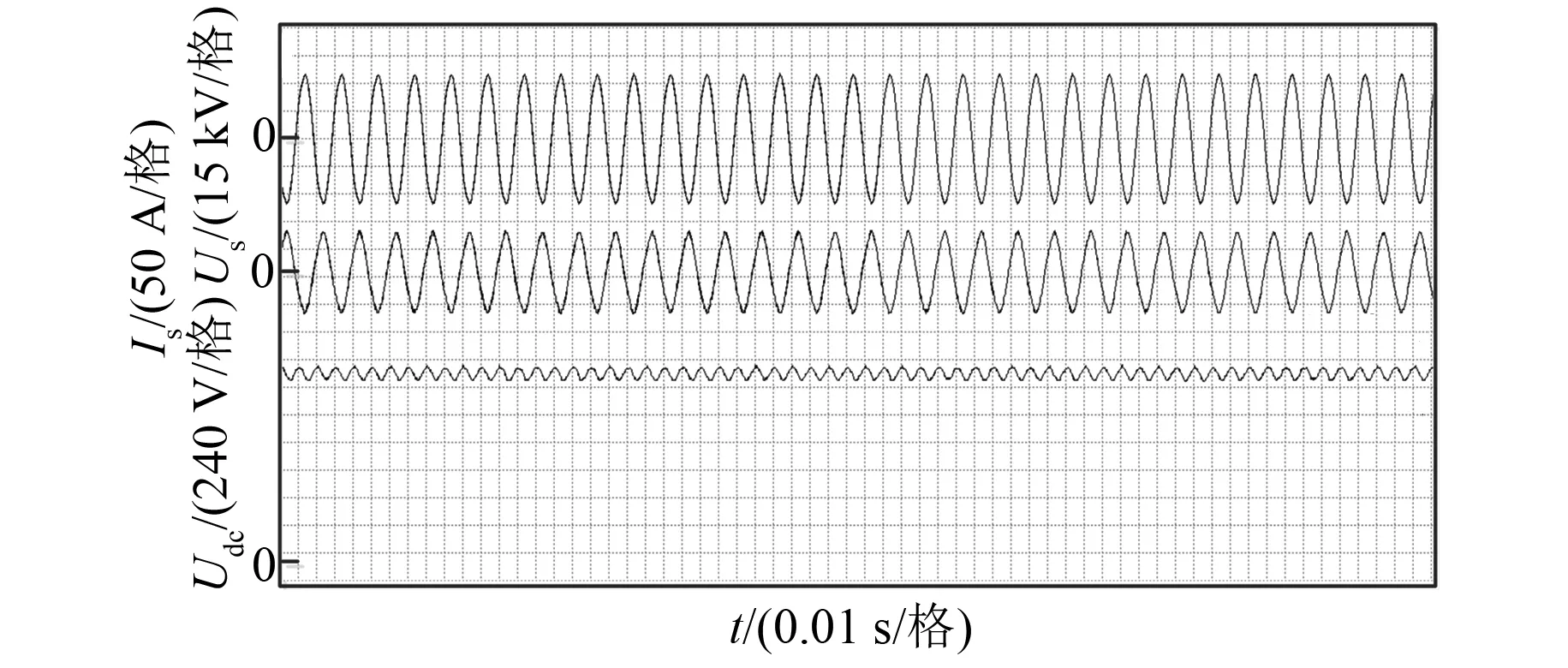
图16 制动工况下的试验波形
5 结 语
本文研究了基于城际动车组单相四象限整流器的电压外环和电流内环的控制策略。仿真和高压试验台验证试验结果表明:从预充电过程过渡到脉冲整流过程中,直流侧电压超调量较小。牵引/制动工况下,网侧电压和网侧电流相位相差0°/180°、正弦性好,直流侧电压稳定,波动较小。
