采用单片机STC15W4K32S4的模拟电磁曲射炮设计
2021-08-06林文燔
林文燔
(黎明职业大学 信息与电子工程学院,福建 泉州 362000)
电磁曲射炮是一种利用电磁感应原理,由电磁力给弹丸加速,弹丸从中获得发射动能的武器,具有无火焰烟雾、噪音低、无有害气体、储能密度高、初速度大、成本低等特点,得到国内外的广泛关注[1]。目前,国外虽已对电磁曲射炮的控制系统有计划地开始进行实用性研究和野外试验,但仍没解决电磁曲射炮耗电量大、能量储存小型化的问题;国内的电磁曲射炮发展也正逐步实现电磁线圈炮及重接炮装备实体化,但仍存在储能装置大、精度不够等问题[2-3]。基于此,本文选取单片机STC15W4K32S4、TFmini Plus激光雷达等,设计一种小型模拟电磁曲射炮控制系统,探索电磁曲射炮的发射控制方案。
1 方案设计
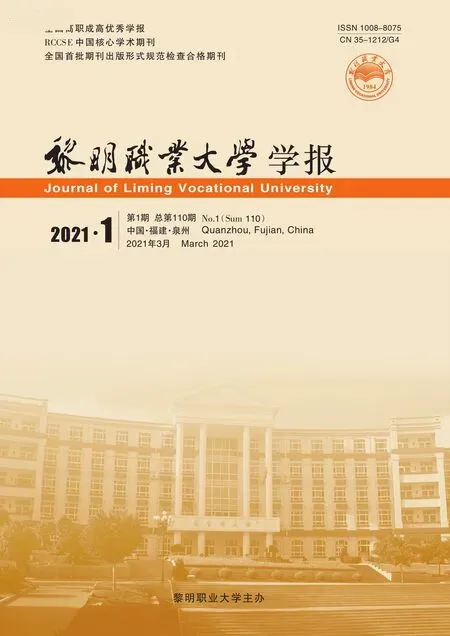
系统主要由控制模块、舵机模块、炮管发射控制模块、TFmini Plus激光雷达测距模块和电源模块组成。采用STC15W4K32S4单片机作为主控芯片;用TFmini Plus激光雷达采集距离数据;双舵机云台控制炮台角度和TFmini Plus激光雷达方向;LCD显示模块作为整个系统的交互界面,调整舵机角度;电源模块和继电器控制电磁曲射炮的充电和发射。控制系统构成如图1所示。
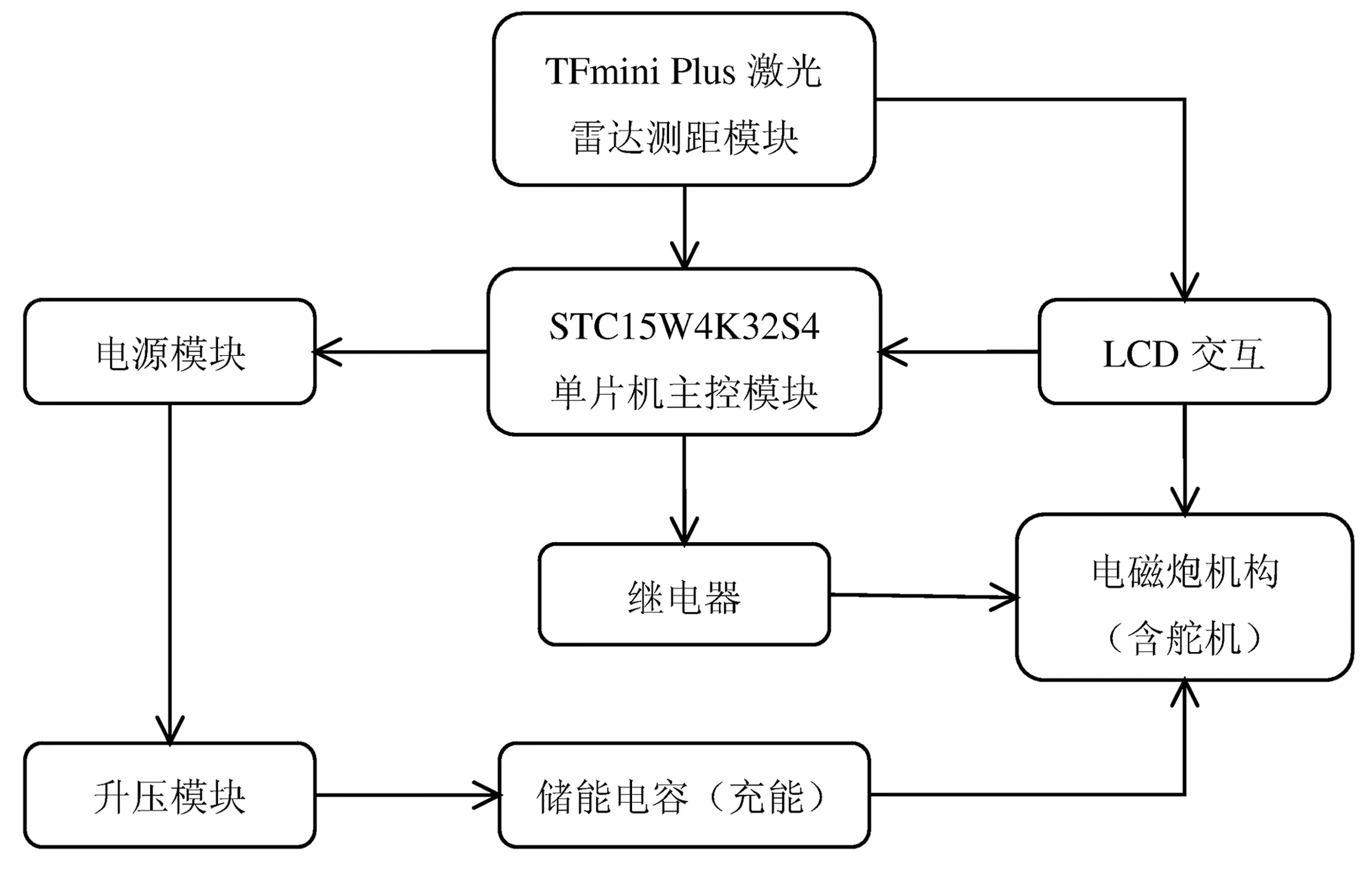
图1 模拟电磁曲射炮的控制系统
TFmini Plus激光雷达将收集到的信息通过串口通信发送给STC15W4K32S4单片机主控模块,主控模块信息处理后控制舵机给出相应的偏转角与俯仰角。电源分别给主控模块和升压模块供电,升压模块通过升压快速给储能电容充电,最后由继电器控制电磁曲射炮的发射。
设计的电磁曲射炮具备手动打靶和自动寻靶两种模式。手动打靶可以按键输入给定标靶的偏转角与距离信息,起动发射程序,打击环形靶(带引导标识,以下简称标靶)。自动寻靶通过TFmini Plus激光雷达测距自动锁定目标,电磁曲射炮自动调整炮管俯仰角、偏转角和电压,打击标靶。
2 模拟电磁曲射炮发射控制
2.1 发射电源电路设计
系统采用直流稳压电源供电,输入电压12 V,采用7805为单片机供电,通过TL494实现DC/DC升压,并以电容为储能元件。
2.1.1 双闭环电控升压电路
输出相同功率的时候,为电磁曲射炮发射线圈供电的电压越小,需要的电流越大。由于低压大的电流电路控制复杂、损耗大,所以采用18650低压蓄电池供电结合升压电路、减小系统工作电流,使控制电路简单且减小损耗[4-6]。该升压模块电路如图2所示。

图2 升压模块电路
2.1.1.1 升压主电路
由电感L1、场效管Q1、快恢复二极管VD1和电容C13构成升压主回路。TL494产生PWM信号通过1N4148、9012、R6、R7组成的驱动保护电路控制场效管,通过L1的储能、泄能使电压抬升。同时,由C1、C2电容组成退耦电路,防止前后电路网络在电流大小变化时,于供电电路中形成电流冲击,影响电路正常工作。
2.1.1.2 电控电压闭环控制
通过R4、R12采样升压后的输出电压,将单片机DA输出作为基准引入TL494的2脚,采用C16电容稳定采样的电压。输出电压升高时,反馈的采样电压同时升高,当该电压大于基准电压时,TL494会抑制电压上升。输出电压降低的情况与之相反。在升压过程中,由C14、R13、R15、R11组成PID控制器,输出和偏差的积分成比例,积分作用时减少系统超调,使电压不会一直在目标值附近抖动,保持调节时输出电压的稳定性。最终,电路的升压大小由单片机决定,并且实现稳压效果。
2.1.1.3 电流闭环控制
为防止电路对电容瞬间充电的电流过大,设计电流闭环控制电路。通过R8、R9采样充电电流,RP4可调电阻调节基准电压引入TL494的15脚。当电流采样大于基准时,电路会降低PWM占空比降低电流,否则相反。同样,由C15、R14、R16、R17组成PID控制环节,使电流调节更稳定。
2.1.2 辅助电源
云平台舵机由12 V主电源供电,而STC15单片机控制模块电压相对较低,由稳压模块供电。采用双电源对电路进行供电,能够提高系统运行的稳定性。稳压模块采用7805为单片机和TL494提供稳定的电压。7805三端稳压IC内部电路具有过压保护、过流保护和过热保护等功能,性能稳定,能够实现1 A以上的输出电流[7]。该器件具有良好的温度系数,可以运用本地调节来消除噪声影响,解决与单点调节相关的分散问题,输出电压误差精度分别为±3%和±5%。
2.2 发射控制系统设计
2.2.1 继电器发射控制
为了防止电磁曲射炮发射时瞬间输出的电流对单片机系统、电源取样控制电路等产生干扰,输出控制采用光耦隔离。光耦的输入信号通过PN1和PN2接入单片机,单片机驱动发光二极管发出一定波长的光,被光探测器接收而产生光电流,再经过进一步放大后输出,完成“电—光—电”的转换,起到输入、输出、隔离的作用。由于光耦合器输入、输出间互相隔离,电信号传输为单向性,具有良好的电绝缘能力和抗干扰能力。
输出的电驱动继电器的触点使电磁曲射炮发射,而继电器可以承受高电压,起到保护电路的作用,故采用100 A的继电器来控制电磁曲射炮的发射。发射原理如图3所示。

图3 继电器控制电磁曲射炮发射原理
2.2.2 发射条件监控
在储能电容电量足够,并且系统没有对电容充电时,才能发射电磁曲射炮。为监控储能电容状态,升压电路的电压采样信号、充电电流采样信号都接入STC15单片机,由单片机来监控系统是否满足发射条件。只有当电压大于发射的最小电压,并且充电电流小于下限值时,才可以触发电磁曲射炮发射机制,通过单片机发送发射脉冲信号。
3 激光雷达测距和打靶
系统使用激光雷达测距的方法,确定目的标靶的位置,对于强光、温度和反射率等环境适应性更强[8-9]。
3.1 激光雷达基本特性
系统选用TFmini Plus激光雷达模组(短距离传感器),基于TOF(飞行时间)原理,配合独特的光学、电学、算法设计,可实现稳定、精准、高灵敏度和高速的距离测量功能。产品低成本、小体积、低功耗,还增加了IP65等级防护,相对于超声波测距适应性更强。产品测量范围0.1~12 m,准确度达到±5 cm@(0.1~6 m)。
TFmini Plus激光雷达模组采用通信协议为UART,默认波特率115 200(可调),数据位8,停止位1,奇偶校验None。
3.2 环形缓冲区数据存储
为了能够及时接受来自激光雷达的传输数据,系统先把数据存储到缓冲区,再在合适的时候对缓冲区的数据进行校验、分析、择取。由于数据量大的时候缓冲区容易溢出,且考虑系统要求数据有一定的存储量,又有一定的实时度,因此用环形缓冲区存储。
环形缓冲区的处理包括存储和读取两个部分。存储在中段执行,随时接收激光雷达传输的数据。存储流程如图4所示。

图4 数据存储流程
读取子程序中制定个数的缓冲区数据,并加以分析,按照协议识别帧头,对数据进行校验,最终判定距离数据值。具体流程如图5所示。
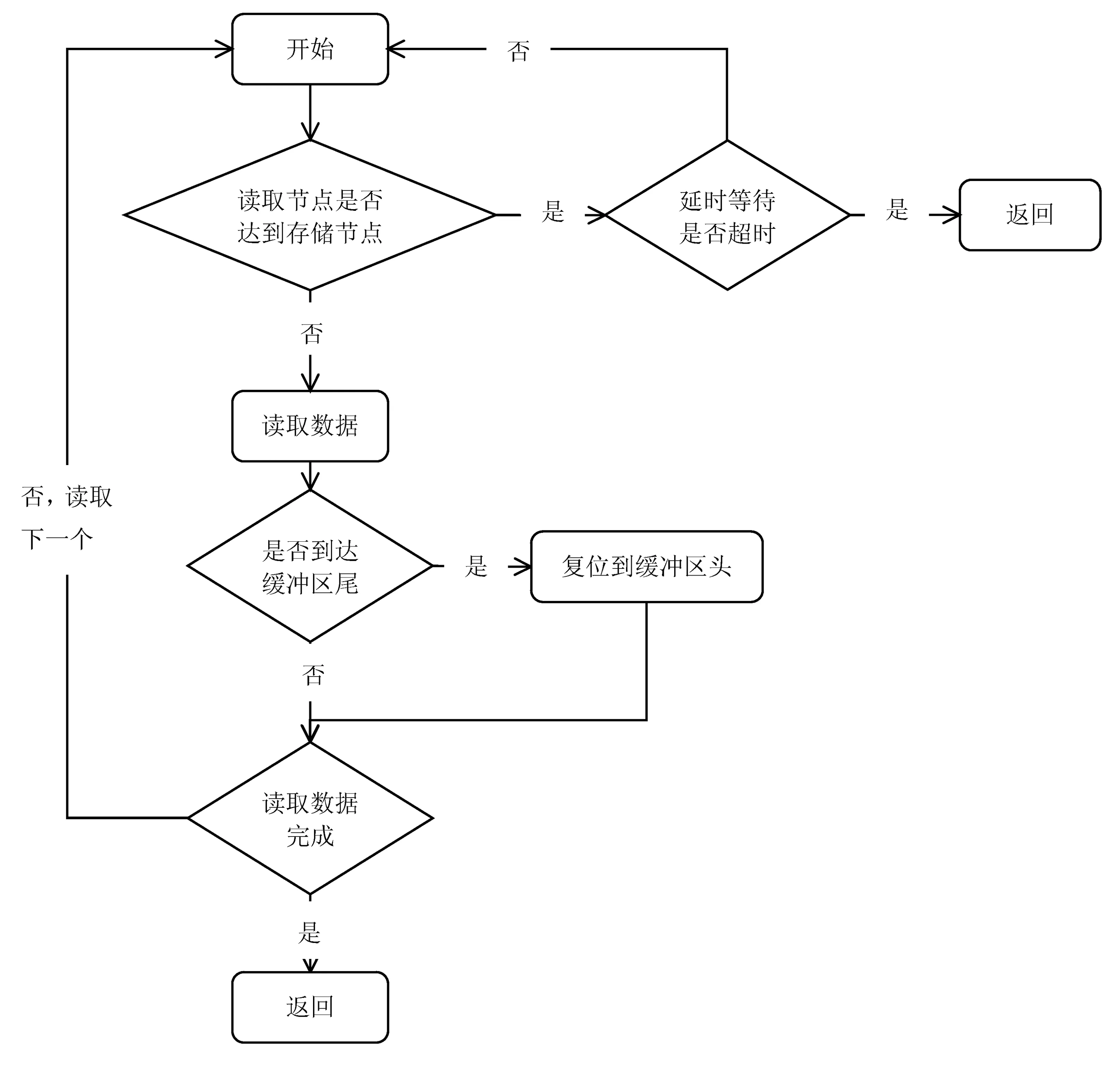
图5 缓冲区数据读取流程
3.3 打靶系统
3.3.1 手动打靶模式
手动打靶可以通过按键输入给定标靶的偏转角与距离信息,起动发射程序,打击标靶。单片机根据录入的信息,调整云台角度,并计算距离、角度对应的电压信号和俯仰角信号,控制炮管俯仰角,并通过DA稳定输出地电磁曲射炮输出电压。当反馈输出正常后,触发继电器,发射电磁曲射炮。流程如图6所示。
图6 手动打靶模式子程序流程
3.3.2 自动寻靶模式
本系统测试的是圆形标靶,自动寻靶模式下,电磁曲射炮从右往左扫描标靶的具体位置。扫描完所有的范围后,单片机模块根据数据计算、判定、记录标靶的位置。根据最终记录的有效位置,电磁曲射炮自动调整炮管俯仰角、偏转角和电压,打击标靶。具体流程如图7所示。
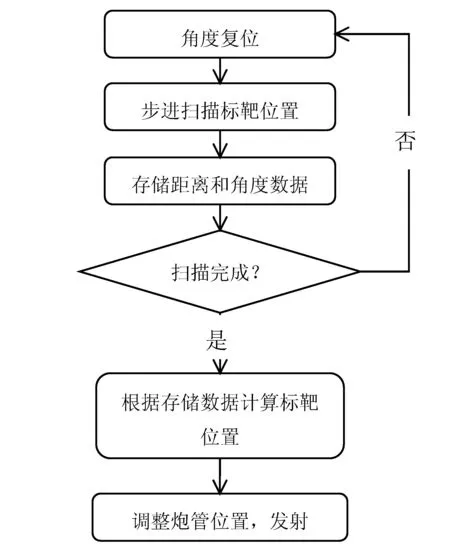
图7 自动寻靶模式子程序流程
4 测试分析
设计的电磁曲射炮与环形靶的距离在2~3 m之间,且与中心轴线偏离角度。搭建好场地后,连接电路电源,进行测试、观察并记录。测试结果如表 1~3所示。

表1 给定距离炮击环形靶数据
表1中,在给定距离炮击环形靶情况下,随着距离的增大,击中环形靶的环数有一定下降。但是均能较为准确命中标靶。
表2中,在给定偏转角炮击环形靶情况下,命中的环数只有6、7环。随着偏转角的增大,曲射炮完成射击的时间越长,但对命中环形靶的环数影响不大。

表2 给定偏转角炮击环形靶数据
表3中,自动寻靶模式下炮击环形靶,测试的距离在2~3 m的范围,角度±30°内,电磁曲射炮均能在25 s内完成设计动作,环数在6、7环,对准确率有一定影响。

表3 自动寻靶并炮击环形靶数据
5 结 论
该系统实现了模拟电磁曲射炮手动设置发射及自动扫描追踪捕获目标的发射。利用STC15W4K32S4单片机主控,实现距离远近的控制、舵机的调整、发射电磁炮击打环形靶。经过测试分析,设计的系统给定距离炮击环形靶情况下能较为准确地命中射击目标。但是在给定偏转角炮击和自动寻靶炮击环形靶环数方面相对不够理想,可作为进一步研究提升的方向。