全时效巡检无人机的研究与应用
2021-08-03陈海华陈凤翔李若愚
陈海华,杨 磊,陈凤翔,李若愚
(贵州电网有限责任公司,贵州 贵阳550000)
输电线路巡检作业通常安排在日间进行,以获得良好光照条件。但山区输电线路面临多变的风、雾、霜、雨等微气象环境,对机巡装备提出了特别要求。同时,应急检修作业也需要在夜间或复杂气象条件下进行,当线路设备出现故障,或在台风、山火、洪水、覆冰等灾害发生后,通过无人机紧急勘察线路设备受损情况,以免带故供电对人员和资产造成损害。输电线路现有的无人机系统部分已具备一定的防雨、抗风、抗低温能力,搭载红外热成像载荷的情况下能够在夜间进行机巡作业,但缺少针对性的检测负载,存在山区作业难度大、效率低、成本高等问题。本文研究结合红外热成像摄像头、高清可见光摄像头、LED补光灯设计一款针对山区复杂气象环境的全时效特种作业无人机,获取夜间真色彩、低噪度图像,实现无人机夜间作业和双通道融合检测功能,为复杂光照和气象条件下的应急巡检提供一种可行、高效的技术方法。
1 全时效无人机整体设计
全时效无人机是指具备一定复杂气象适应能力,在日间和夜间均能进行高效巡检作业的无人机系统,包括全天候无人机飞行平台和全时效作业负载。全天候无人机飞行平台以多旋翼能够悬停观测的无人机为主,以现有某无人机系统为例,机身防护能力达到了IP45,可承受15m/s大风,最大遥控距离8公里,具备LTE备份通信链路和冗余导航定位系统,机身六向采用了光流和红外避障技术,有效避障距离达到5m以上,可搭载水平环扫毫米波雷达实现对线缆级细小物体的避障,配备了夜航灯和主动示踪通信系统,基本满足夜间和复杂气象条件下的飞行要求。负载方面无人机厂家提供了可见光、红外热成像一体相机,日间可见光检测线路的销钉级缺陷,日间或夜间被动红外热成像检测设备表面温度异常情况,单相机负载不具备夜间检测销钉级缺陷的能力。搭配探照灯多负载模式下通过云台同步能够扩展夜间检测能力,但存在增加了机身起飞重量和耗电,缩短了续航时间;复杂气象条件下探照灯使用时间不确定,常态多负载配置成本高等问题。电网线路巡检需要集成度更高的一体化载荷以适应复杂多变的山区作业环境和时敏性任务作业需求。
全时效负载整体设计主要从以下几方面考虑:一是应能兼容主要的飞行平台,从重量、能耗、控制、功能等方面均能适配现有轻型、小型无人机飞行平台(最大起飞重量分别为小于等于7kg和25kg),且不影响飞行平台本身性能;二是可见光和红外热成像相机的空间分辨率均能满足距离成像10m以外发现销钉级缺陷或线缆直径大小异常温度区域的要求;三是可见光、红外热成像、LED补光灯高度集成同时工作情况下,能够避免光源、热源相互干扰,实现长时间稳定工作。
2 全时效负载设计
依据功能开放程度,无人机飞行平台可分开放负载软件开发包(SDK)和不开放负载SDK两类。其中,前者机身防护等级更高,功能更强,代表了无人机发展趋势;后者使用简单,存量巨大。前者为研究的主要兼容方向。
2.1 功能模块
对于开放负载SDK的无人机系统,通过SDK开发,能够实现云台检测,下行遥测、上行遥控链路,配合遥控端SDK开发,能够在现有无人机系统基础上集成自研负载,功能模块设计如图1所示。
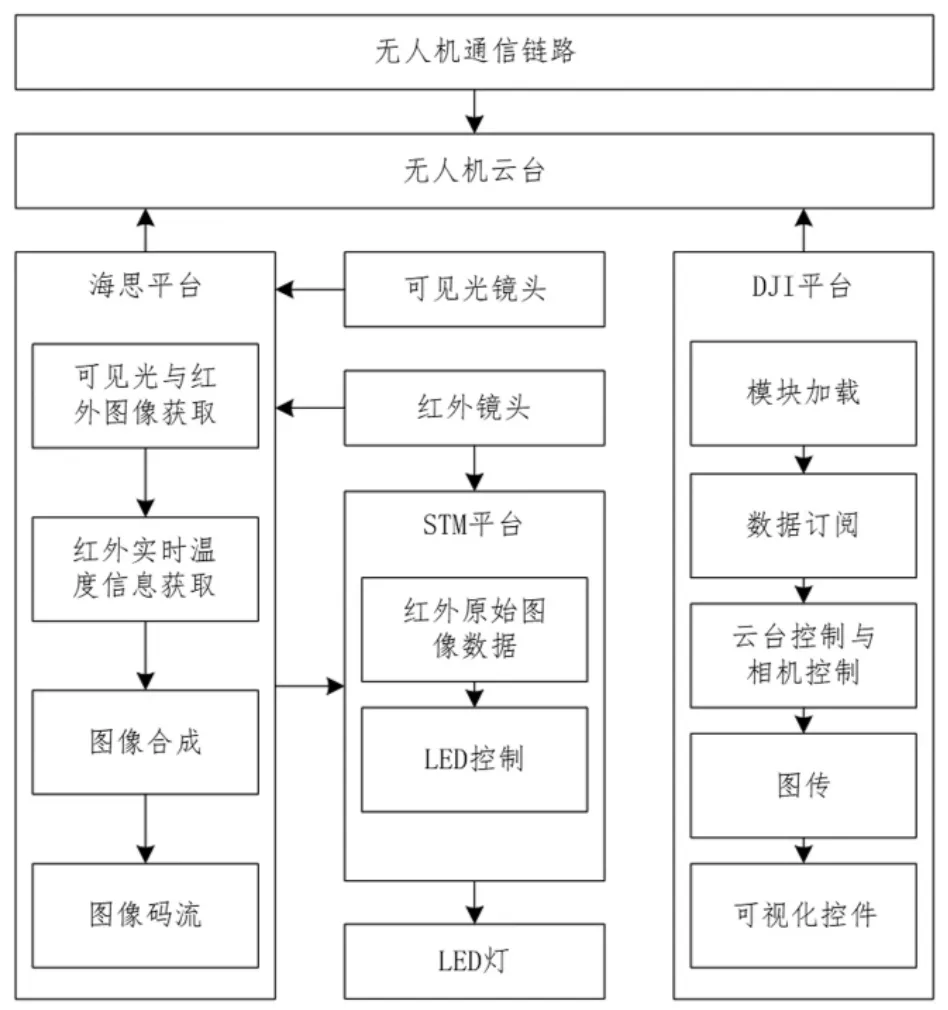
图1 传感器功能模块设计
无人机SDK调用无人机功能函数,实现基本模块加载、数据订阅、云台控制、相机控制、图传、遥控器可视化控件等功能,搭建相机运行的基本功能环境。可见光和红外热成像图像经镜头分别采集后交由海思平台处理,形成码流传回地面实时图传信号,或存储在机身存储介质内;支持二次分析的红外热成像原始照片交由STM平台处理,存储在机身内,飞行完成后进行详细分析。相机控制包括图像合成模式、拍摄录像、LED灯由无人机SDK、海思平台、STM平台共同完成,实现完整的无人机负载功能。
2.2 检测能力
可见光和红外热成像均应根据10m外检测销钉级缺陷为指标选用镜头和传感器,空间分辨率如图2所示。
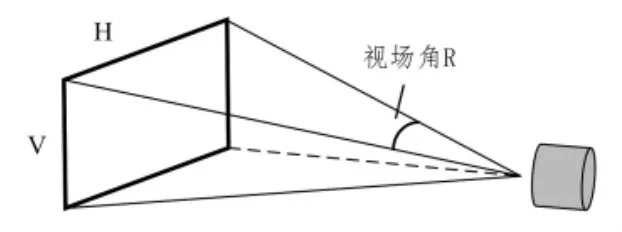
图2 视场角示意图
镜头视场角和传感器大小决定目标成像分辨率。空间分辨率如下式所示:
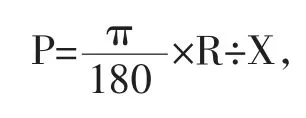
P为水平方向空间分辨率,单位为弧度;R为镜头视场角,单位为度;X为传感器水平方向像元数。像元映射物体大小与物距相关,可按照下式略算:

N为该距离像元对应的物体大小,单位为m,又称像方分辨率;L为相机至目标物体距离,单位为m。销钉尺寸通常在20mm左右,输电线缆直径通常在10mm以上。可见光检测销钉缺陷时,销钉成像大小应在10个像素以上,方能识别销钉并判断是否有缺失;红外热成像检测时,线缆成像大小应在2至3个像素以上,方能区别显示常见的温度异常区域。当物距为10m时,不同分辨率和视场角的相机,像方分辨率如表1所示。

表1 像方分辨率计算
由计算可知,视场角越小,单位像素对应的物体越小,图像分辨率越高。检测要求可见光10个像素对应物体小于20mm,红外热成像2个像素对应物体小于10mm,结合表1计算结果可知,可见光视场角应小于55.5°,红外热成像视场角应小于25°,需选用满足视场角要求的相机镜头作为全时效集成部件。实现结果中,可见光显示中心将与红外热成像重合,显示区域将大于红外热成像,以在融合检测中实现各自的功能效果。
2.3 集成设计
全时效负载应能在夜晚正常作业,现有的可见光难以满足低照度或无光条件下获取真色彩、低噪度图像要求,通过LED补光能够在一定距离内实现夜间可见光检测,同时LED补光可补充红外热成像反射光源,使热成像效果距离更远,成像效果更加细腻。但在相机内同时集成可见光、红外热成像传感器,LED补光灯,控制芯片和图像处理芯片等可能导致功耗器件过于密集,造成相互干扰和热量积聚,影响设备稳定性和准确性。集成设计应从器件布局、结构材质等方面进行优化,布局图如图3所示。
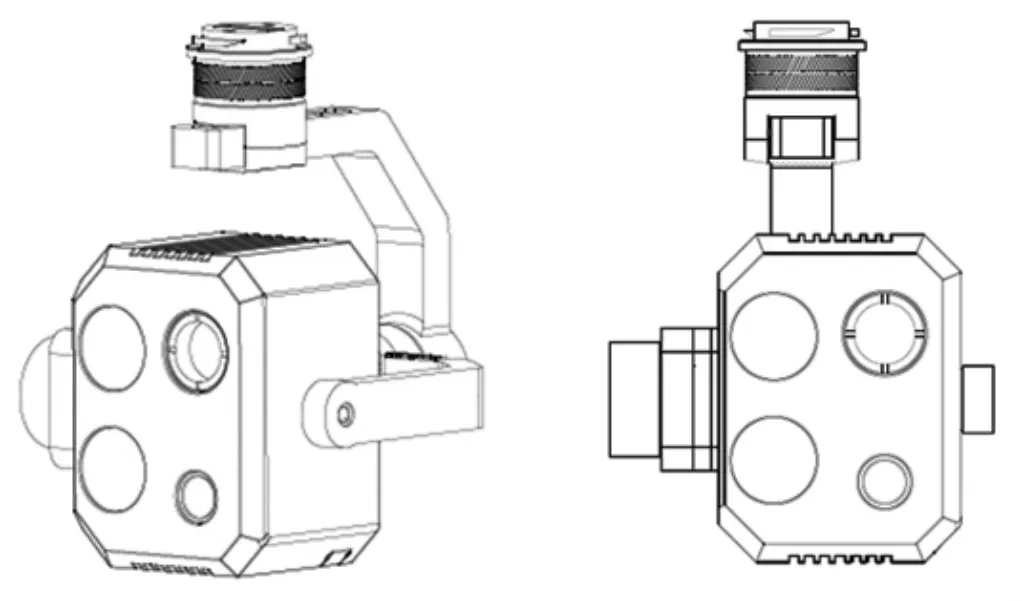
图3 传感器布局图
通过双LED布局侧边布局高效利用相机空间,提供高亮度光源,满足夜间巡视要求。散热设计和实物如图4所示。
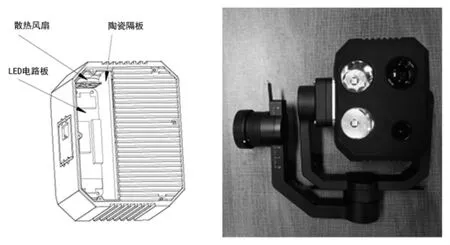
图4 传感器散热设计和实物图
LED补光灯主要是热源和光源,采用聚光、密封减少光源干扰,通过陶瓷隔热片、金属散热片、内置风扇和底部透风孔,加快相机内外热量交换,减少热源干扰,保障高密度集成器件长时间正常工作。
3 全时效巡检无人机应用实例
实际应用中,全时效巡检无人机在夜间打开LED补光灯的情况下,能够极大提高可见光成像质量,满足夜间巡检销钉级缺陷的要求,重量和功耗相比单个融合传感器并无明显增加,以较少的硬件改动扩展了机巡作业无人机的夜间作业能力;同时可见光和红外热成像同屏显示,互为补充,为夜间快速寻找缺陷隐患位置提供了融合感知手段,如图5所示。

图5 全时效巡检无人机成像效果
4 结束语
随着机巡作业在输电线路巡检应用中的深度发展,机巡装备的标准化、特异化将同时得到增强,无人机将能覆盖更大范围和更多作业场景。通过研究基于现有无人机平台的可见光、红外热成像、LED灯一体化任务负载,探索验证了特种装备研制方法,通过整体设计、传感器选型、基础搭建和散热改良,研制了一款能够保障输电线路夜间和复杂气象条件下巡视的特种负载,提高和完善了无人机巡检的技术手段和适用范围,对于提高电网服务水平、保障供电安全具有现实意义。
