四旋翼无人机模糊自适应PID系统设计
2021-08-03王祺
王 祺
(成都信息工程大学 控制工程学院,四川 成都610225)
当前主要的四旋翼无人机是一个具有6个自由度却只有4个控制输入的欠驱动系统,且是一个非线性、多变量的系统,因此在其控制系统中姿态控制成为核心问题,设计一个能自我适应、鲁棒性优良的四旋翼无人机成为主流技术人员的研究方向。原始PID系统在多变的环境中难以保持良好的稳定性。由此本文将模糊PID原理应用到无人机PID系统中,使无人机针对不同的环境制定出不同的PID参数,并在设计基础上使用Simulink仿真验证系统。实验证明,采用模糊自适应PID系统能大大提高无人机的稳定性和抗干扰能力。
1 四旋翼无人机数学模型
1.1 坐标系的建立与转换
本文选用常见的“X”型结构四旋翼无人机。首先需要对坐标系进行定义,描述一个三维空间中的运动状态至少需要两个坐标系,本文选取图1机体坐标系(O-xyz)以及图2地理坐标系(O-φψθ)。利用欧拉角中俯仰角φ,横滚角θ,偏航角ψ来描述机体的运动状态,俯仰角φ对应机体绕x轴运动,横滚角θ对应机体绕y轴运动,偏航角ψ对应机体绕z轴运动。假设理想情况下无人机的无刷电机产生的升力始终垂直于机体水平线上,根据机体坐标系到地理坐标系转换得出转换矩阵:

图1 机体坐标系
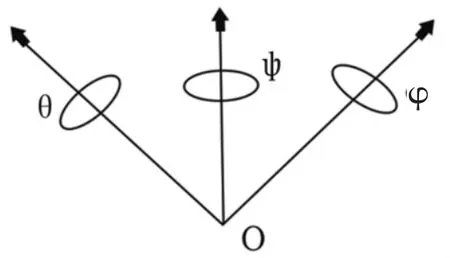
图2 地理坐标系
1.2 运动状态模型
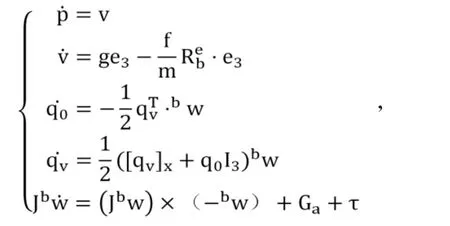
为不失一般性,假设四旋翼无人机是刚体且质量分布均匀,忽略其阻力作用,只存在升力以及无人机的重力,利用四元数数学模型综合四旋翼飞行控制模型得出基于四元数的模型:
2 模糊PID控制模型
2.1 模糊自适应PID系统的设计
模糊自适应PID系统分为模糊推理部分和PID控制器,它以误差e和偏差变化率ec作为输入,对不同时刻的误差e和偏差变化率ec进行模糊化,利用设计好的模糊规则表进行解模糊,通过算出的ΔKp,ΔKi,ΔKd整合在原有的PID基础上,然后将其改变到系统当中,成为新的PID系统。以下是模糊自适应PID的结构图如图3所示。
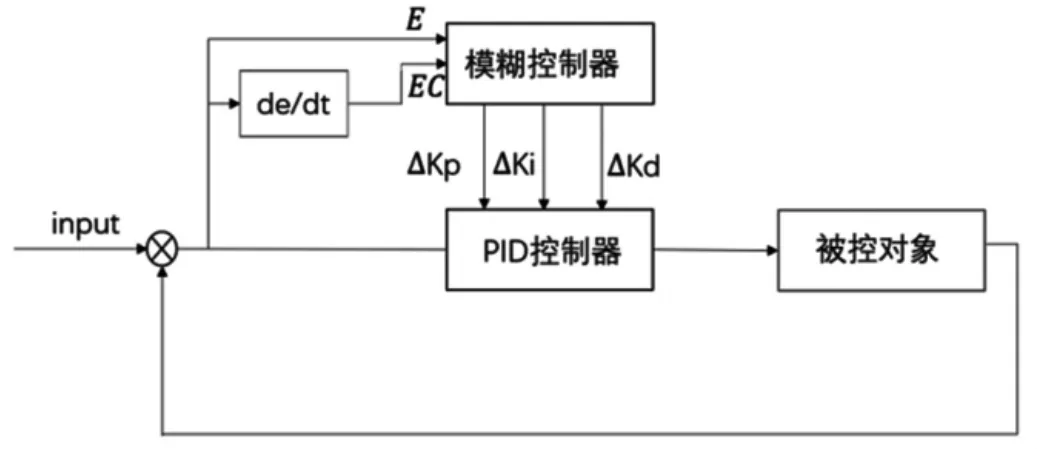
图3 模糊自适应PID的结构图
2.2 数值模糊化
对输入e和ec确定模糊子集,对于PID控制可以选择模糊子集为。赋予变量语言分别为“负大、负中、负小、零、正小、正中、正大”,引入e和ec的模糊集论域,对于本次仿真,定义论域为{-6,6}。同样,对于ΔKp,ΔKi,ΔKd也选择同样的模糊子集:,对于模 糊 集 论 域,ΔKp∈{-0.4,0.4},ΔKi∈{-0.001,0.001},ΔKd∈{-0.01,0.01}。
2.3 建立模糊规则表
根据隶属度,可以推测出输入的e和ec各自所占的隶属度,根据模糊规则表去找输出值对应的隶属度,从而得出ΔKp,ΔKi,ΔKd。对于Kp的设计,由于Kp影响系统的响应速度,Kp过大会产生较大的超调,较小会减小响应速度,在调节时首先应适当增大,随后适当调节增加精度,以便有合适的超调量和调节时间;Ki会影响系统的稳态误差,所以在调节初期适当取小,待稳定后适当增大;Kd影响系统的动态特性,前期调节时适当增大Kd,之后适当减小。根据不同的误差制定不同的49条规则制定出相应的ΔKp,ΔKi,ΔKd的模糊规则。
3 仿真实验与结果分析
3.1 仿真实验设计
建立以模糊PID为核心的实控制系统,设计以单位阶跃输入为输入的信号源,并加入随机数字作为干扰信号,用于检测系统抗干扰能力;输入模糊机的一个信号为偏差e,另一信号为经微分后的偏差率ec,从模糊机出来的ΔKp,ΔKi,ΔKd经过原PID数据的整合,得到新的PID数据加入系统中。
3.2 仿真结果与分析
在Simulink构建以上的模糊自适应PID仿真模型后,进行阶跃输入和干扰仿真实验,以偏航角为例,在模糊自适应PID和传统PID两个系统中同时输入阶跃信号,随后的一段时间加入随机干扰信号。图4是偏航角的阶跃输入和随机干扰信号对比图,模拟的是无风的情况下四旋翼无人机从启动到突然有干扰的情况;图5是偏航角的标准正弦输入对比图,模拟的是在变速情况下对信号的准确输出能力。
图4中,四旋翼无人机加入阶跃信号后,在系统为传统PID的作用下,其超调量远高于模糊自适应PID系统,相比之后,模糊自适应PID系统在启动时更加平稳,减少了抖动带来的干扰;同时,模糊自适应PID系统的调节时间小于传统PID系统的调节时间4,系统的快速性提高。在加入随机干扰信号之后,可以看出传统PID系统的四旋翼无人机出现大幅度上下振动,这会使无人机产生不稳定性,而且可以看到恢复正常飞行的时间较模糊自适应PID系统更慢;模糊自适应PID系统飞行器在受到干扰后较平稳,且恢复正常时间较短,抗干扰能力更强。

图4 阶跃输入和随机干扰信号对比图
图5中,传统PID系统的无人机在标准正弦信号下飞行时会出现大幅超调,这会使飞行器飞行幅度较大,精确度不高,而模糊自适应PID系统无人机能较好地稳定在标准信号的左右以适应不同的速度,误差较小,能较好地跟随信号。

图5 偏航角的标准正弦输入对比图
4 结束语
本文对四旋翼无人机的飞行原理以及控制系统模型建立进行了说明,并设计了模糊自适应PID控制器,并通过Simulink进行实验模型搭建和仿真实验,通过模糊PID系统与传统PID系统的飞行器进行比较,结果显示模糊自适应PID系统比传统PID系统在快速性以及稳定性都更快更好,有一定的鲁棒性,能更好地跟随信号。
