一种机载卫通天线预测控制方法研究
2021-08-02严雅婧
王 龙,严雅婧
(1.中国电子科技集团公司第五十四研究所,河北石家庄 050000;2.天津交通职业学院,天津 300000)
0 引言
机载卫星通信天线是机载卫星通信数据链的主要组成设备之一,天线根据飞机的位置、航向、姿态(横滚、俯仰)调整转动角度保证空间指向不变,以确保对准卫星。天线保持对准卫星不仅需要可靠的天线伺服控制系统,还要求有高精度、低延时的飞机航向、姿态数据。但工程实际中飞机航向、姿态数据往往存在更新周期较长,延迟大的现象,天线所需航向、姿态数据变化不及时,导致天线跟踪精度差,信号信噪比低,影响卫星通信质量。
本文首先对天线伺服系统和控制角度计算进行介绍,然后针对天线伺服控制中所需飞机航向、姿态数据时效性差的问题,在现有伺服控制系统上引入了一种基于最小二乘法的三次多项式姿态变化曲线拟合并实施预测控制,该方法具有可靠性高,计算量小,易于在嵌入式系统实现等优点。最后通过对某型天线进行动态测试,证明了该方法能够显著提高天线跟踪精度。
1 天线控制系统介绍
1.1 系统组成介绍
天线伺服控制系统由天线控制单元、驱动电机、角度编码器等组成。以方位-俯仰型座架结构为例,方位电机带动天线水平转动,俯仰电机带动天线竖直转动,角度编码器分别反馈方位、俯仰的角度。天线控制单元主要由控制芯片DSP、电机驱动器、信标接收机组成。DSP采集飞机姿态、信标接收机数据、天线角度、监控指令,进行对星角度计算、伺服环路计算,完成天线指向闭环控制等,其中核心部分为角度计算和环路控制。天线伺服系统主要设备组成框图见图1。
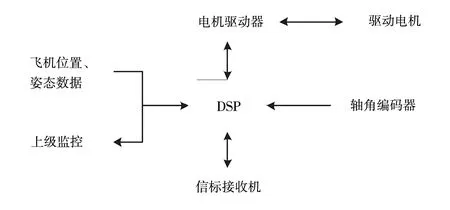
图1 天线伺服控制系统组成图
1.2 天线角度计算
天线角度计算分为天线对星地理指向角计算和天线座架控制角计算。天线对星地理指向角计算通过坐标系旋转的方式实现,将卫星所在地心坐标系(原点o为地球中心,Z轴自o指向北极,X轴自o指向子午线与赤道交点,Y轴按右手定则顺序组成)旋转至天线所在地理坐标系(原点o为基准中心,Y轴指向正北,X轴指向正东,Z轴按右手定则垂直指向天空),旋转的顺序依次是卫星经度、天线经度、天线纬度。
天线对星方位地理角A,俯仰地理角E,计算公式[1]如下:
(1)
(2)
式中,λ为卫星经度;λe为飞机经度;θ为飞机纬度;R为地球等效半径,6378km;h为同步卫星高度,35786km。
天线座架控制角计算是将对星天线对星方位地理角、俯仰地理角折算到天线座架的控制角,目的是隔离飞机在飞行过程中的姿态影响。此计算同样是通过坐标旋转的方式求得,旋转的顺序依次载机航向、横滚、俯仰。
天线方位、俯仰座架控制角度Aj,Ej计算公式[1]如下。
(3)
Ej=arcsin[sinEcosPcosR+cosEsin(A-H)sinR-cosEcos(A-H)sinPcosR]
(4)
式中,H为飞机航向值;R为飞机横滚值;P为飞机俯仰值。
1.3 天线控制介绍
完成天线角度计算后,需要依据计算得出的座架控制角对天线进行方位、俯仰转动控制。方位、俯仰的控制流程见图2。天线控制一般采用位置环、速度环、电流环三环路负反馈闭环控制[2]。最外层为位置环,次内层环路为速度环,内层环路为电流环。

图2 伺服控制流程框图
Aj、Ej为天线方位、俯仰控制角度;Aj0、Ej0为天线方位、俯仰实际角度;As、Es为天线方位、俯仰控制速度;As0、Es0为天线方位、俯仰实际速度;AI、EI为天线方位、俯仰控制电流;AI0、EI0为天线方位、俯仰电机实际电流。
天线伺服控制中的速度环和电流环是内环,是提高性能的关键环路,由电机驱动器完成。电流环的功能是根据给定的电流值产生电机控制电流,电流环设计成为Ⅰ型系统,提高响应速度,防止控制时产生超调。速度环设计等效为一阶惯性环节,提高带宽。天线位置环设计为Ⅱ型系统,提高对速度量变化的响应速度。天线伺服闭环控制常采用增量式PID方法,详细见文献[3],此方法特别适用于计算机软件编程,被目前数字控制系统广泛采用。DSP根据式(3)、(4)计算的Aj,Ej值进行闭环控制,增量式PID计算公式如下:
Δu(k)=Ae(k)-Be(k-1)+Ce(k-2)
(5)
其中:
(6)
(7)
(8)
每次输出只需计算:
u(k)=u(k-1)+Δu(k)
(9)
Kp、TI、TD分别为PID控制器的调整参数,T为采样周期,e(k)为控制器的输入值,u(k)为输出值。
2 姿态数据预测
2.1 姿态数据预测意义
由前文介绍,天线需要根据航向、姿态的变化来调整座架的角度,实现对准卫星。为了适应飞机航向、姿态快速变化,机载卫星通信天线的设计转速一般大于50°/s,天线在高转速下对准卫星,不仅需要更加精准的控制,还要高时效性的飞机航向和姿态数据。飞机航向、姿态数据通常由飞机上的惯导设备提供,常用的传输方式为串行传输,这必然存在一定的数据延迟。假设飞机横滚变化率为30°/s,在仅考虑10ms的数据延迟情况下,角度变化滞后误差可达0.3°,如果加上航向、俯仰数据的滞后,综合误差至少大于0.5°,这还未考虑天线转动过程中的惯性滞后、伺服控制延迟。例如:等效口径0.8m的Ka频段抛物面天线半功率波束宽度(功率下降3dB波束宽度)约为1.1°,在0.5°角度误差下信号掉落会大于1dB,可见数据延迟对天线跟踪精度的影响是很大的,如果能够根据已知的飞机航向、姿态来预测下一时刻的数值,天线根据预测的数值调整指向,在一定程度上会提高天线的指向精度。
2.2 基于最小二乘法的姿态数据预测
本文对航向、姿态数据的预测均采用基于最小二乘法的三次多项式拟合曲线外推方法,通过曲线拟合求出多项式曲线的系数,然后将所需预测的点代入所拟合的函数,求出预测值。文中选用5个已知数据拟合三次多项式,求解下一时刻(第6个)数值,天线使用预测的第6个数据进行闭环控制,实现“超前”指向控制。设待拟合的三次多项式函数为f(x):
f(x)=a0+a1x+a2x2+a3x3
(10)
(1)构建线性方程组。
Buff_In[0]=5;//输入5个数据元素
for(i= 0;i< 5;i++){
Buff_In[1]+=i+1;
Buff_In[2]+=(i+1)*(i+1);
Buff_In[3]+=(i+1)*(i+1)*(i+1);
Buff_In[4]+=(i+1)*(i+1)*(i+1)*(i+1);
Buff_In[5]+=(i+1)*(i+1)*(i+1)*(i+1)*(i+1);
Buff_In[6]+=(i+1)*(i+1)*(i+1)*(i+1)*(i+1)*(i+1);
Buff_Out[0]+=*(Data_In+i);
Buff_Out[1]+=(i+1)*(*(Data_In+i));
Buff_Out[2]+=(i+1)*(i+1)*(*(Data_In+i));
Buff_Out[3]+=(i+1)*(i+1)*(i+1)*(*(Data_In+i));}
for(i=0;i<(3+1);i++){
k=i;for(j=0;j<(3+1);j++){
Buff_AB[i][j]=Buff_In[k++];}}
(2)高斯列主元消去法解线性方程组。
for(k=0;k<3+1-1;k++){
Column=k;
Mainelement=Buff_AB[k][k];
for(i=k;i<3+1;i++){
if(fabs(Buff_AB[i][k])>Mainelement){
Mainelement=fabs(Buff_AB[i][k]);
lu8_column=i;}}
for(j=k;lu8_j<3+1;j++){
Tema=Buff_AB[k][lu8_j];
Buff_AB[k][j]=Buff_AB[Column][j];
Buff_AB[Column][j]=Tema;}
Temb=Buff_Out[k];
Buff_Out[k]=Buff_Out[lu8_column];
Buff_Out[Column]=Temb;
for(i=k+ 1;i<3 + 1;i++){/*消元过程*/
TemMik=Buff_AB[i][k]/Buff_AB[k][k];
for(j=k;lu8_j<3 + 1;j++){
Buff_AB[i][lu8_j]-=TemMik*Buff_AB[k][lu8_j];}
Buff_Out[i]-=TemMik*Buff_Out[k];} }
Buff_Out[3]=Buff_Out[3]/Buff_AB[3][3];/*回代*/
(3)求节多项式系数。
for(i= 3;i> 0;i--){
Sum= 0;
for(j=i;lu8_j<3 + 1;j++){
Sum+=Buff_AB[i-1][lu8_j]*Buff_Out[lu8_j]; }
Buff_Out[i-1]=(Buff_Out[i-1]-lf32_Sum)/Buff_AB[i-1][i-1];}
第四步求第6个值
Y(6)=Buff_Out[0]+Buff_Out[1]*6+Buff_Out[2]*6*6 +Buff_Out[3]*6*6*6;

图3数据预测流程图
3 预测控制流程介绍
航向、姿态预测计算的步骤如下:
(1)分别将待预测航向、姿态数据按照组队列的格式(先进先出原则)构成五个元素的数据包;
(2)对数据包进行基于最小二乘法的三次多项式拟合计算,求解多项式系数;
(3)将求解的系数构造成三次多项式函数;
(4)代入预测点的值(该值可以为小数),求解预测点的航向、姿态值;
(5)将预测值代入伺服控制环路计算,得出伺服速度控制量,进行电机控制;
(6)重复以上(1)-(6)步骤。
程序实现流程见图3。
4 实际应用
为了验证对天线进行预测控制的跟踪效果,选用天线口径为0.8m的Ka频段天线,在摇摆转台上进行航向、姿态变化模拟测试,航向起始角度271.0°,变化范围±10°,周期5s,见图4。俯仰起始角度0°,变化范围±7.5°,周期5s,见图5。横滚起始角度0°,变化范围±12°,周期5s,,见图6,均按照正余弦曲线变化。

图4 摇摆转台航向变化曲线图
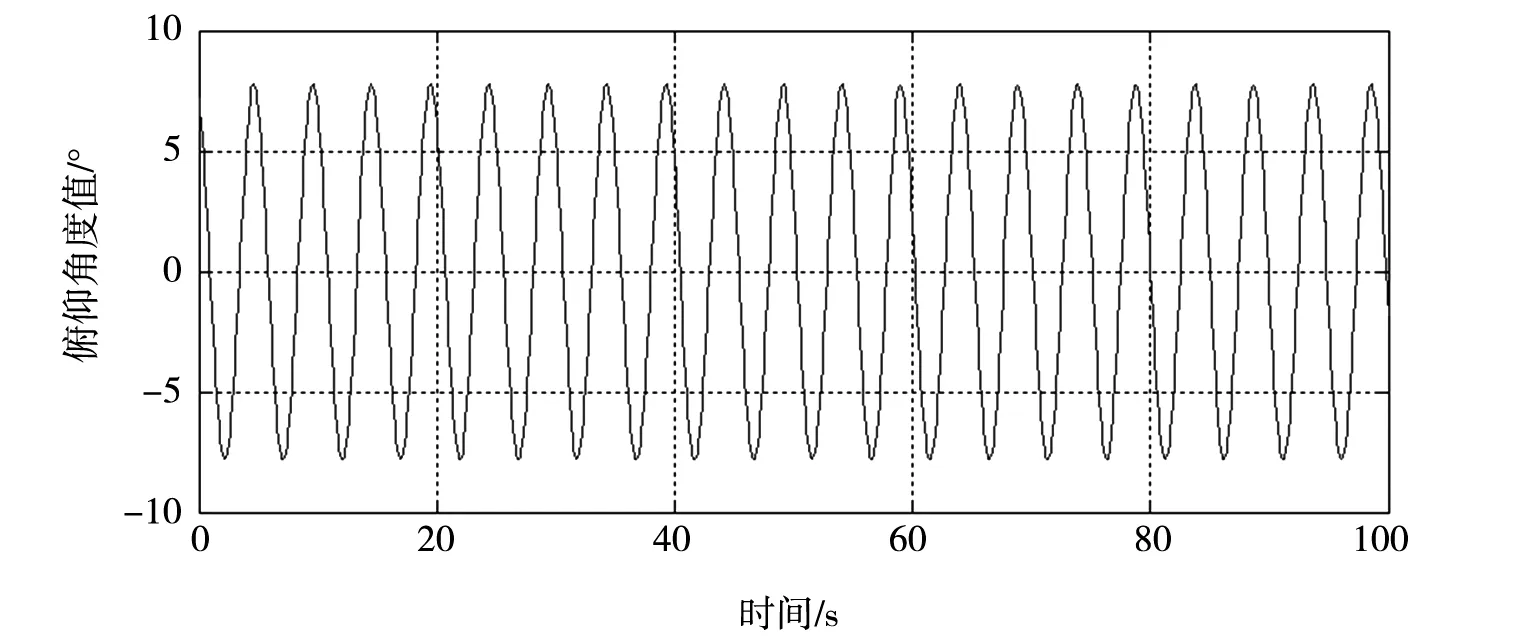
图5 摇摆转台俯仰变化曲线图

图6 摇摆转台横滚变化曲线
选用RS422串行接口形式的惯导来测量摇摆转台的运动角度,并将数据传送给天线控制单元,串口波特率115200bps,数据发送周期20ms。天线静态对准卫星时接收的信标强度最大值约为-66.5dBm。
摇摆转台动态摇摆过程中使用天线控制单元中的信标接收机解算卫星信标信号强度并存储。在未引入预测控制算法时,采集到的卫星信标电平波动情况如图7,从图中可以看出卫星信标电平波动最大值约为1.2dB,根据GJB 7082-2010中跟踪精度的计算方法(跟踪精度值越小,跟踪效果越好),跟踪精度(RMS)为0.25°。

图7 未引入预测控制算法的信标强度电平波动图
在引入预测控制算法后,采集到的卫星信标电平波动情况如图8,电平波动最大值约为0.7dB,此跟踪精度(RMS)为0.20。电平波动的峰值明显变小,跟踪精度有一定程度的提高。

图8 引入预测控制算法的信标电平波动图
5 结束语
机载卫星通信天线的跟踪精度值直接反映天线跟踪效果的好坏,针对天线接收载机惯导数据的延迟问题,本文引入了基于最小二乘法的多项式曲线拟合并对姿态进行预测从而实施预测控制的思想,通过采用对比测试的方法,确定了该方法在降低数据延迟,提高天线跟踪精度方面有显著的作用,且该方法在实际工程项目中应用,稳定可靠。