电动钻机动力系统柴油发电机组交互振荡的研究*
2021-07-31闫宏亮李晓伟李斌斌
闫宏亮 李晓伟 李斌斌
(西安石油大学陕西省油气井测控技术重点实验室 西安 710065)
1 引言
石油钻机是油、气田开发的主要设备,随着钻井技术的发展,电驱动钻机因其性能好、经济性高、可靠性强、故障率低、操作更方便灵活等优势替代了原有的机械钻机。柴油发电机组作为应急、备用电源或远离电网的偏僻地区的主要供电电源,因此对于远离电网的钻井现场,其动力系统必须采用多台柴油发电机组并联运行来保障钻井现场的电力 供应。
然而在柴油发电机组并联运行之前,各个机组输出的电压和频率都要符合并联运行的条件。要保证发动机在额定功率范围内应对各种负载下都能保持稳定的转速,这对柴油发电机组的调速系统在应对时变性负载和突发情况下提出了很高的要求[1]。目前,从控制的角度上,提高柴油发电机组的运行质量的研究主要体现在调速系统和励磁系统中。当柴油发电机组发生传感器故障时,可以通过StateFlow逻辑判别的模糊PID容错控制作为柴油发电机组发生传感器故障的转速控制[2];也可以将变领域模糊PID运用在柴油机的电子调速器中来提高柴油机转速运行的质量[3]。励磁系统的控制是一种最有效、最直接的控制方式,它可以提供同步电机从空载到满载以及过载时所需的励磁电流,当电力系统发生故障时,励磁系统可以直接强行作用,从而保证系统的稳定运行[4]。在调速系统中施加控制的同时对励磁系统也进行控制可以更好地提高柴油发电机组的运行性能。
目前,国内关于研究柴油发电机组的功率交互振荡的研究方法有虚有差法,通过调频控制判别功率发生变化是由负荷变化还是供油干扰引起的,只有当发生供油干扰时才会加入控制进行补偿,但是控制策略还是以常规PID控制为主。因此,本文研究的内容是通过改进柴油发电机组的控制策略来解决交互振荡的问题,以模糊PID控制策略替代常规PID控制应用于机组的励磁调压系统和转速调速系统中,不仅仅是针对发生交互振荡情况下的控制策略,还能提高电动钻机动力系统中发电机组的运行质量。
2 柴油发电机组仿真建模
在Matlab/Simulink平台上建立柴油发电机组系统模型,包括柴油机模型、同步发电机模型、励磁系统以及负载模型,下面分别进行论述。
2.1 柴油机及其调速系统
调速系统方块图如图1所示。
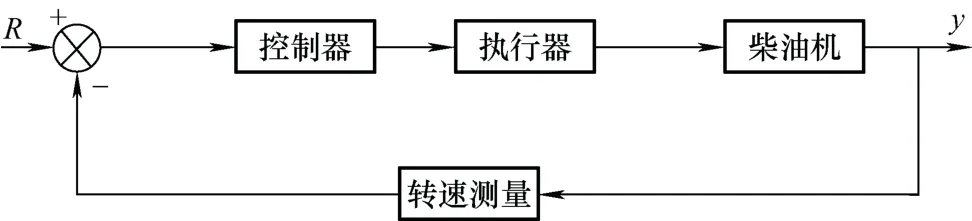
图1 调速系统方块图
2.1.1 柴油机
柴油机内的状态变量不止一个,但在实际设计中采用高阶模型则比较困难,根据理论分析可以将其简化为一阶模型且能达到满意的效果[5]。根据达兰贝尔原理,柴油机发电机组的运动方程为

式中,J是驱动轴的转动惯量(kg·m2);Md是驱动轴的驱动力矩(N·m);Ml是负载阻力矩(N·m);ω是驱动轴的角速度(rad/s)。
由于柴油机的结构和工作十分复杂,其中涉及许多过程,所以根据柴油机工作特点,当喷油泵油门尺杆位置改变时,柴油机存在一个滞后的过程,可以对柴油机的运动方程进行简化[6],推导出柴油机的简化模型可以用一个纯滞后环节代替,其传递函数为

式中,τ表示滞后时间,可由转速和其冲程数计算得到

式中,n为柴油机的转速(r/min);Nst为柴油机的冲程系数;Ncyl为柴油机的气缸数。
2.1.2 转速控制器
目前,在柴油机调速系统中广泛应用的还是常规PID调节,而柴油发电机组在工作时往往会出现时变性、非线性的情况,所以单采用常规PID控制很难保证柴油发电机转速的稳定性[7]。因此为进一步提高柴油发电机转速的控制效果,针对常规PID控制存在的固有缺陷,结合模糊控制对解决非线性问题所具有的优点,形成模糊PID 控制。
常规PID控制的传递函数为

式中,kp、ki、kd分别为常规PID控制的比例系数、积分系数和微分系数;e(t)为系统误差。
模糊PID控制的输入为转速偏差e以及转速偏差的变化率ec,通过模糊推理得到PID参数kp、ki、kd的修正量dkp、dki、dkd使得PID满足不同误差e和误差变化率ec对控制器参数的不同要求。拟加入模糊PID控制结构图如图2所示。在Simulink中建立模糊PID控制器如图3所示。
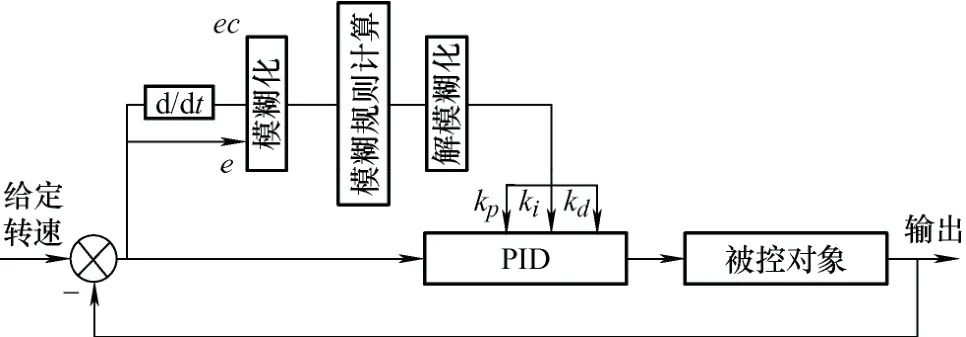
图2 模糊PID模块图
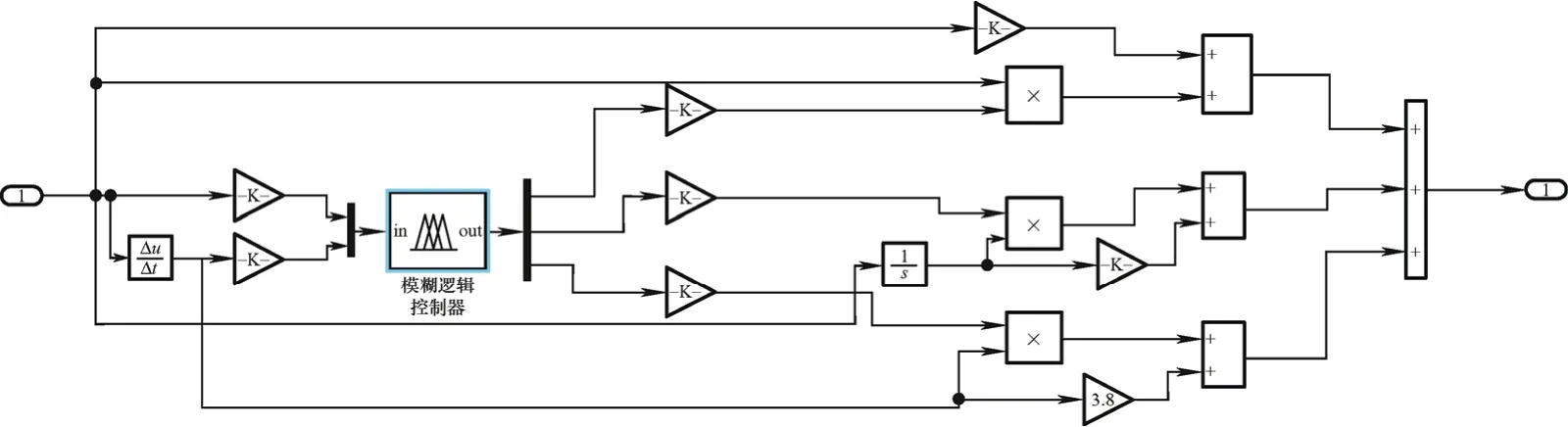
图3 模糊PID仿真图
2.1.3 执行器
执行器的输入是通过控制模块输出的电信号,执行器接受信号后,进行功率放大,将接受的电信号转换为执行机构中伺服机的输出轴的位移量,通过连接装置进而转换为油泵齿条的位移量,产生喷油器滑阀开度,这一过程根据控制原理可将其理解为存在放大作用和存在延迟环节,因此执行器的模型可用一阶惯性环节来代替[8]。其传递函数为

式中,Tp为执行器常数。
在执行器当中还包括缓冲器和调整机构,由积分环节和传递延迟环节组成作为相位补偿的功能。补偿延迟环节时间常数都由经验得到。
在Matlab中建立调速系统的仿真模块如图4 所示。

图4 调速系统仿真图
2.2 同步发电机及励磁调压系统仿真模型
2.2.1 同步发电机模型
目前,应用在大多数电站和需要独立供电的场所的柴油发电机组都采用交流同步发电机,作为电力系统的核心单元,同步发电机将原动机传递的机械能转换成电能,所以决定电力系统的稳定性以及电能质量取决于对同步发电机的各种特性并以此建立其准确的数学模型[9]。
从已知的同步发电机的技术参数可以确定发电机的模型参数,计算出同步发电机的各项参数如下所示
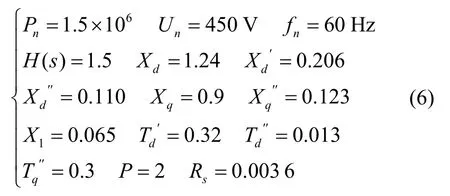
以上参数均为标幺值,并将以上数据代入Matlab中的Synchronous Machine pu Standard 模型中,作为柴油发电机组的同步发电机的模型。
2.2.2 励磁控制系统及其励磁控制器
励磁系统对于电力系统的稳定起着至关重要的作用,其作用不仅对供电电网的电压起到调节,而且当发电机并联运行时,对并联机组的无功功率进行分配[10],弥补常规PID控制参数整定的复杂性,应用模糊控制和常规PID相结合的模糊PID来作为励磁控制的主要控制策略。
同步发电机的励磁系统十分复杂,如果从励磁系统的控制策略进行研究,不考虑其他(如辅助控制信号),则可以根据Matlab中SimPowerSystem工具箱提供的励磁系统模型结构,进行一定的简化。本文的励磁系统模型(图5)借鉴了闫利伟等[11]的模型,在控制模块加入模糊PID,模糊PID模块图在调速模块中已提及,这里不作赘述。

图5 励磁系统模块图
3 模糊PID控制
模糊PID控制算法是将PID控制方式与模糊控制结合起来的控制算法,基本控制原理为:依据现场生产技术操作人员经验建立模糊控制技术规则,运用模糊规则的推理运算,能够实时自动修改PID控制的参数,以满足不同工况下对控制参数的自整定。本文将模糊控制和常规PID控制相结合为常规二维模糊控制器,将转速偏差e和转速偏差变化率ec作为输入变量,经过模糊推理加入PID三个参数的增量dkp、dki、dkd,在执行过程中控制器不断检测偏差和偏差变化率,通过模糊规则在线修改参数的增量来满足系统控制的要求[12]。
3.1 量化因子和比例因子
量化因子是把清晰值从物理论域映射到模糊论域上的变换系数,将输入信号的取值范围放大或缩小,以适应设定的模糊论域要求。设已知输入变量x的物理论域为[-Xj,Xj],其模糊论域为[-nj,nj],则定义输入变量x的量化因子kx为

比例因子是指经过近似推理模块得出的模糊量,需要经过解模糊模块的处理变换成清晰量,才能推动后面执行机构的变换系数。假设输出量u的模糊论域为[-nj1,nj1],后面执行机构要求的输入控制量的物理论域[-Xj1,Xj1],则定义输出变量u的比例因子ku为

3.2 模糊控制规则
模糊控制规则是模糊控制器的核心以及设计控制系统的主要内容。本文模糊规则采用模糊子集为{NB, NM, NS, ZO, PS, PM, PB}。隶属度函数一般选用三角形和Z型为主。模糊规则采用语言型模糊规则,语言型模糊规则是由一系列的模糊条件语句组成,即由许多模糊蕴涵关系“if A and B then C”构成。这些条件语句一般是由人工大量试验、观测和操作经验的归纳总结得出,在近似理论中,可以作为推理的出发点和得出正确结论的根据和基础。语言型模糊控制器就是把模糊控制规则用模糊条件语句表述的Mamdani型控制器[13]。由于在调速系统和励磁系统采样的输入信号不同和调节机制不同,所以在模糊控制器上也需要区别进行 阐述。
3.3 调速系统模糊PID控制
把转速差作为输入量e的论域取值范围为[-3, 3],转速差的变化率ec取值范围为[-2, 2],模糊集为{NB, NM, NS, ZO, PS, PM, PB}。量化因子根据输入量的物理论域而来,不同的输入变量只要改变量化因子就可使输入量变化后仍落在原来的模糊论域里。输出量kp、ki、kd的论域都取为[-3, 3],比例因子根据输入、输出的数据能和外部设备相匹配而计算得来[14]。
在模糊逻辑控制器中主要使用Mamdani模糊型,隶属度函数选用三角形,如图6所示。模糊规则是根据现场控制技术人员经验、系统本身特点总结得到的模糊条件语句的集合,其中调速系统模糊PID控制量中kp的增量dkp模糊控制规则如表1 所示。
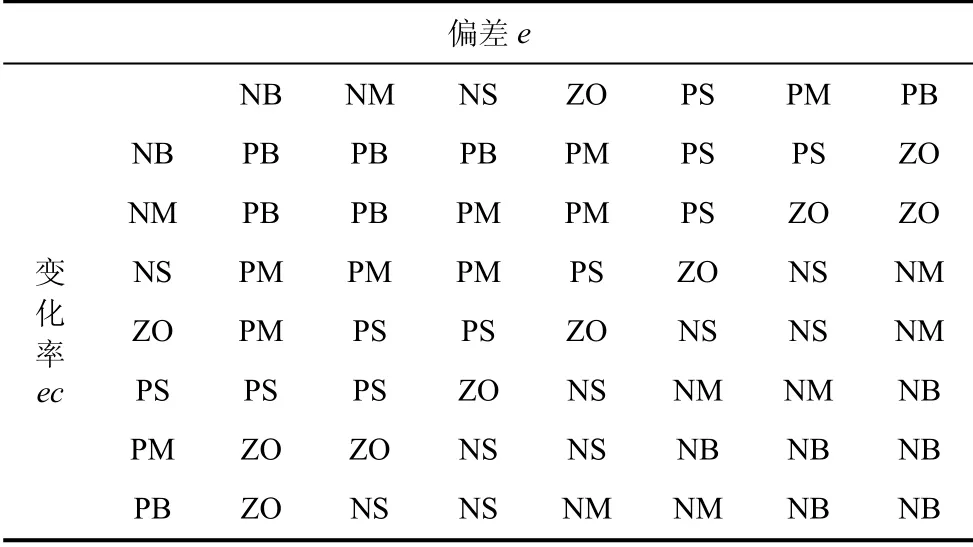
表1 调速系统模糊PID模糊规则
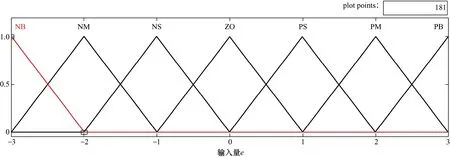
图6 调速系统模糊PID隶属度函数
3.4 励磁系统模糊PID控制
励磁系统模糊规则输入量为发电机输出电压与给定电压的偏差e的论域为[-1, 1],电压差的变化率ec的论域设定为[-8, 8],模糊集为{NB, NM, NS, ZO, PS, PM, PB},其输出的kp、ki、kd的输出论域分取为[-1, 1], [-0.5, 0.5]和[-0.6, 0.6]。在模糊逻辑控制器同样采用Mamdani模糊型,隶属度函数选用三角形和Z型即可,如图7所示。模糊规则的编写要达到系统控制精度高和响应速度快的要求[15]。励磁系统模糊PID的kp的增量dkp的模糊控制规则如表2所示。
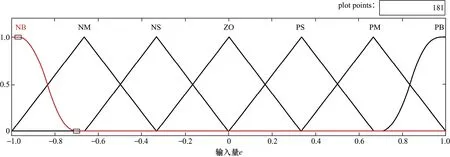
图7 励磁系统模糊PID隶属度函数
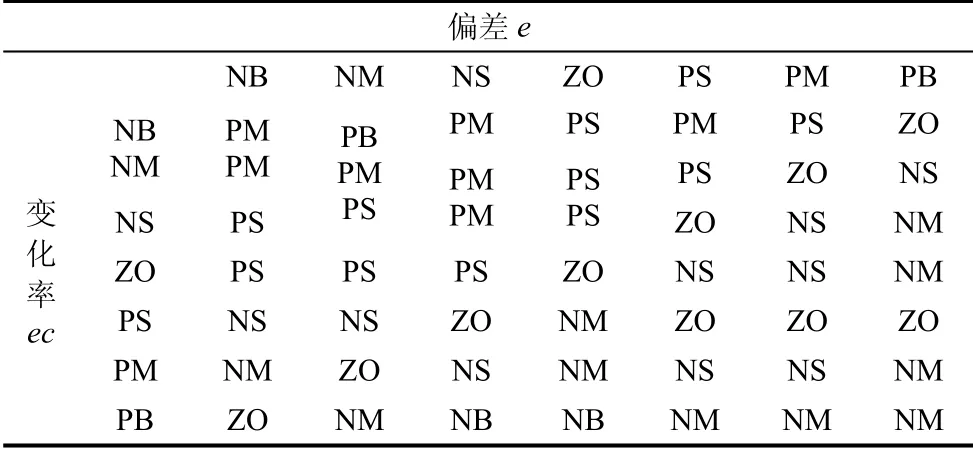
表2 励磁系统模糊PID模糊规则
4 仿真试验
搭建仿真平台对柴油发电机组进行仿真试验。对本系统而言,运用两种含有不同模糊规则的模糊PID控制运用在相同的机组上,进行与常规PID控制方式比较试验。
其中负荷模型采用Simulink中的Three-phase Parallel RLC Load模块,假设柴油发电机组的所有负荷等效成一个电阻和电感并联负载。参数如下:Un=450 V,fn=60 Hz,PL=1.2×106W,QL=2 000 var,不考虑输电线路损耗。
4.1 柴油发电机单机组的仿真试验
在Matlab/Simulink平台中模块构建柴油发电机组单机运行模型[16]。一号机组调速模块加入模糊PID控制,励磁模块采用模糊PID控制,二号机组调速、励磁都采用常规PID控制,其中调速模块PID的控制参数如下:Kp=44.8,Ki=56.5,Kd=3.8。在10 s突加600 kW的负载,对比产生的转速和输出功率的波形图。
从图8可以看出,加有模糊PID控制效果要比常规PID控制效果要好。刚起动时,加有模糊PID的一号机组在5.5 s内就达到稳定,比常规PID达到稳定的时间(6 s)较短,而且在转速达到稳定之间的过渡过程,模糊PID转速的波动状况要比常规PID的情况较好;当在6 s时加入50%的静态负载时,模糊PID的瞬态调差率要优于常规PID。所以得出结论,在调速模块中加入新型控制能改善其转速的稳定性。而从图9可以看出,加入模糊PID的励磁模块在同步发电机的输出功率上起到很好的控制作用,带有模糊PID控制的同步发电机组在4.5 s左右就达到稳定输出,比常规PID控制达到稳定的时间(7.5 s)要好得多。如果要改善发电机输出功率的稳定性,励磁控制必不可少。综上得出,保证转速和励磁的稳定性运行,加入模糊PID控制在发生负载变化时转速的波动和功率的突变要优于常规PID控制。
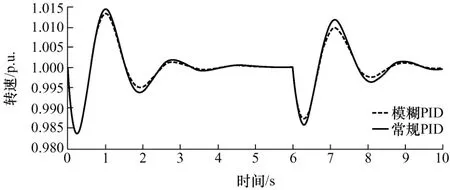
图8 单机组转速变化曲线图
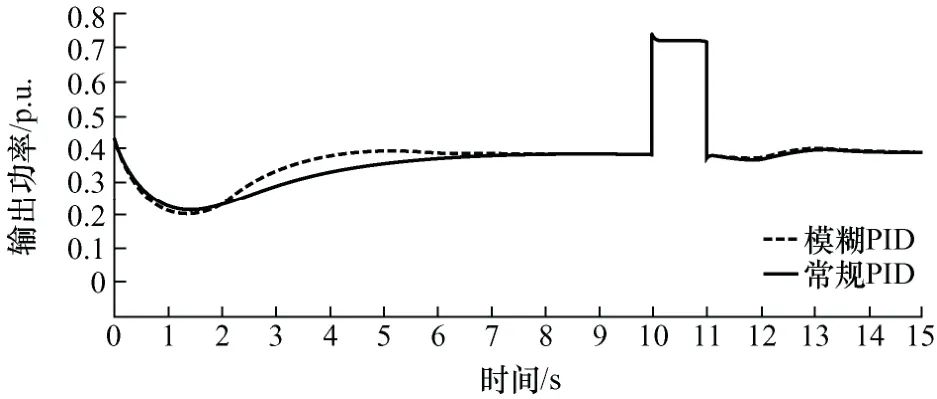
图9 单机组功率变化曲线图
4.2 柴油发电机组并联运行功率交互振荡仿真
交流柴油发电机组无论是在并联运行还是并入电网运行往往出现功率的周期性振荡,一台机组的功率增加和另一台机组的功率减少同时进行,被称为功率交互振荡,造成功率交互振荡的原因就是存在干扰力矩[17]。因为造成干扰力矩的因素有很多,本文将各种因素对供油量产生的干扰近似地用一正弦函数代替[18],即

式中, Δgr为干扰油量;k为干扰油量的幅值(相对单位);ω为干扰油量的角频率;α为干扰油量的初相角。
在Matlab/Simulink中建立双机并联模型,两台机组均为同型号机组,参数都一样,取k=0.6,ω=9π,α=0。
由图10可知,带有常规PID控制一、二机组输出功率在10 s后发生等幅周期振荡,一号机组振荡幅值为44.4 kW,二号机组振荡幅值为45.6 kW,频率振荡为0.012 Hz,根据图11可得带有模糊PID控制的一、二号机组振荡幅值分别为20.4 kW和 21.6 kW,频率振荡为0.002 4 Hz。则可以证明模糊PID控制在解决柴油发电机组交互振荡的问题时,在功率和频率的振荡中较常规PID取得更好的控制效果,提高了并联运行的稳定性。
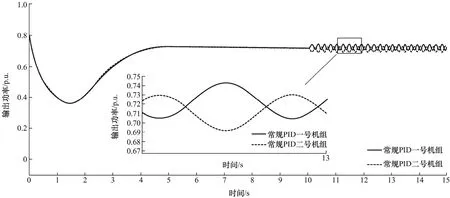
图10 常规PID机组输出功率

图11 模糊PID机组输出功率
5 结论
柴油发电机组无论是单机运行还是并联运行其稳定性都十分重要。本文运用模糊控制和常规PID控制相结合的方式在Matlab/Simulink平台上进行仿真建模,并模拟实际存在于柴油发电机组的功率交互振荡,通过仿真证实当带有模糊PID控制并联机组发生交互振荡时,机组发生的功率和频率的振荡明显小于常规PID机组,从而验证了模糊PID的可行性。
