基于改进二维CFAR参考滑窗技术的目标检测研究
2021-07-30谢春思刘志赢
谢春思,刘志赢,吴 帅,桑 雨
(1 海军大连舰艇学院导弹与舰炮系,辽宁大连 116018;2 海军大连舰艇学院学员五大队,辽宁大连 116018;3 91991部队,浙江舟山 316001;4 91526部队,广东湛江 524064;5 91278部队,辽宁大连 116041)
0 引言
岛岸附近复杂的地理环境使得末制导雷达很难从背景噪声中提取出低信噪比目标信息,严重影响反舰导弹近岸作战能力[1-4]。检测前跟踪算法是对低信噪比目标准确检测和跟踪的关键技术之一[5-7]。其思想是利用目标点迹运动的规律性和噪声点迹的无规律性特点,对多帧雷达回波信号图进行相参或非相参累计,实现从噪声背景中提取目标轨迹的目的[8]。检测前跟踪TBD算法虽然能够实现对低信噪比目标的检测和跟踪,但对雷达回波原始数据不设置门限,或设很低的门限几乎对所有点迹遍历,降低了漏警率,但数据处理量大[9]。采用DGF二维恒虚警率CFAR检测器对原始雷达回波数据处理的方法,通过改进二维CFAR检测器参考滑窗,达到减小TBD算法累计处理量的目的,较好地实现了TBD算法高效数据处理能力。
1 改进的二维参考滑窗
1.1 CFAR检测器
常见恒虚警检测器分为两大类:均值类恒虚警检测器和有序统计类恒虚警检测器[10]。文中主要研究在高斯噪声背景下的目标检测,常用均值类CFAR检测器,其工作原理如图1所示。
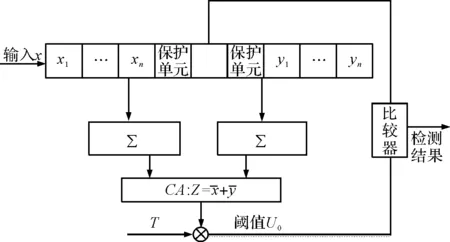
图1 均值类CFAR检测器
一般在检测单元周围设置保护单元,防止目标能量外泄影响参考单元对背景噪声功率水平估计的准确性。设D为检测单元的检测统计值,左侧参考单元为xi(i=1,2,…,n),右侧参考单元为yi(i=1,2,…,n),此时检测器参考单元长度为2n,检测单元两侧的参考单元的长度各为n。则噪声功率水平估计值Z可由x,y求均值得到,与标称化因子T的乘积得到自适应门限阈值U0。判决门限阈值为[11]:
(1)
1.2 二维CFAR检测器参考滑窗
相对传统一维CFAR检测器,二维CFAR检测在距离维度和多普勒维度能够获取更多的目标信息,使得二维CFAR的目标检测性能有明显的提升,能更准确实现检测目标的目的[12-13]。常见二维CFAR检测器参考滑窗有如图2~图4分别所示的矩形、十字形及米字形[14]。

图2 矩形参考滑窗
图2为矩形参考滑窗,采样单元多,对背景噪声功率水平估计最接近实际水平,对低信噪比目标的检测性能好,但数据处理量大,检测实时性低。图3为十字形参考滑窗,仅在距离维和多普勒维采样,具备对高信噪比目标快速有效检测能力,但因其采样率低,不能稳定估计背景噪声功率水平,故对低信噪比目标的检测性能差。图4为米字形参考滑窗,在十字形参考滑窗的基础上增加了对角线参考单元的采样,提高了准确、稳定估计背景噪声功率水平能力和低信噪比目标的检测能力。
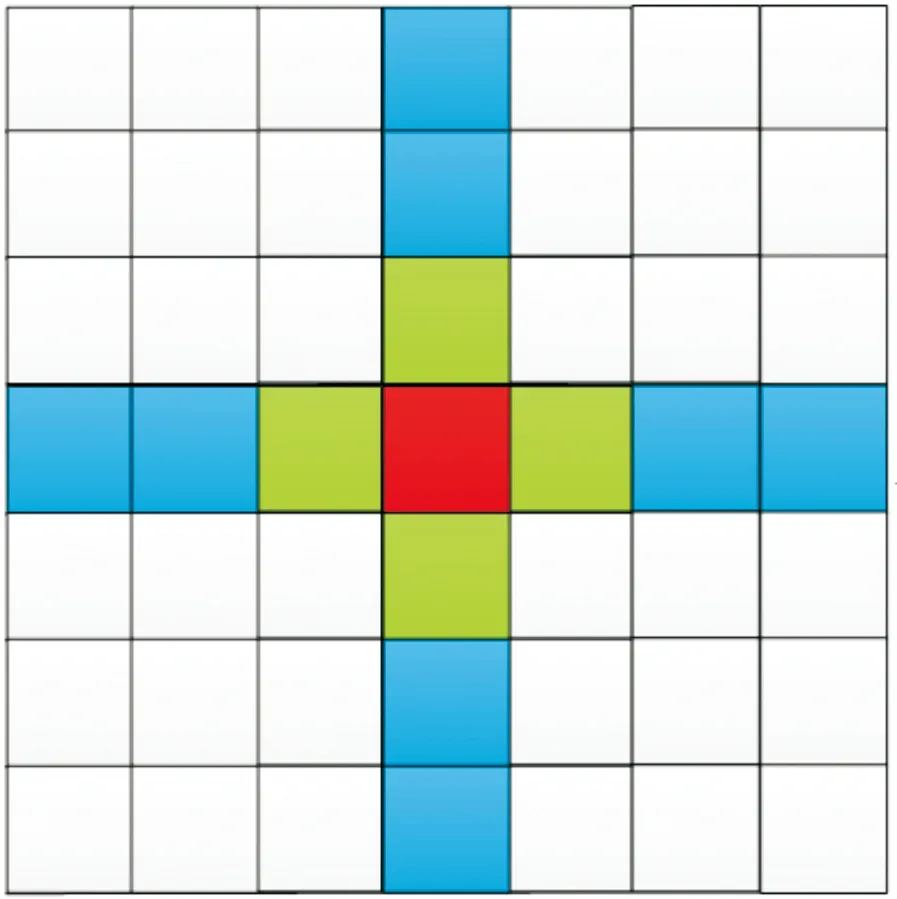
图3 十字形参考滑窗
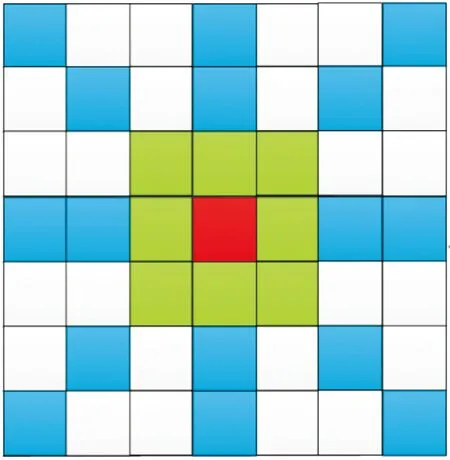
图4 米字形参考滑窗
1.3 网格形参考滑窗
为更准确估计参考滑窗中噪声功率水平,提升低信噪比目标的检测能力,同时提高系统的实时性,在矩形参考滑窗的基础上增加了随机采样点数,得到了图5所示的网格形参考滑窗。

图5 网格形参考滑窗
改进网格形参考滑窗同样在检测单元周围设置了矩形保护单元,防止检测单元内目标能量外泄,参考滑窗内的参考单元呈网格形,相比于矩形参考滑窗内参考单元,减少了一半采样次数,降低了计算量,相比于米字形及十字形参考滑窗增加了参考单元个数,提高了噪声功率水平估计的准确性。
2 背景水平估计性能评估
对以下条件仿真:假设岛岸背景噪声为高斯白噪声,噪声功率水平为1。参考滑窗大小为15×15,仿真次数为10次,对比矩形、十字形、米字形和网格形滑窗内参考单元的噪声功率水平估计性能。
对比网格形、十字形及米字形参考滑窗内的噪声统计直方图形状,可以看出网格形参考滑窗内的噪声统计直方图形状最接近背景噪声分布。分别用均值和方差衡量各滑窗内的噪声水平估计和偏离度,4种参考滑窗对噪声功率水平估计的统计如表1所示,由表1绘制趋势图如图7、图8所示。
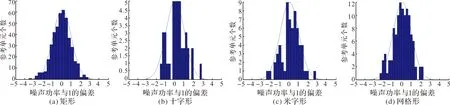
图6 4种参考滑窗内噪声水平统计直方图
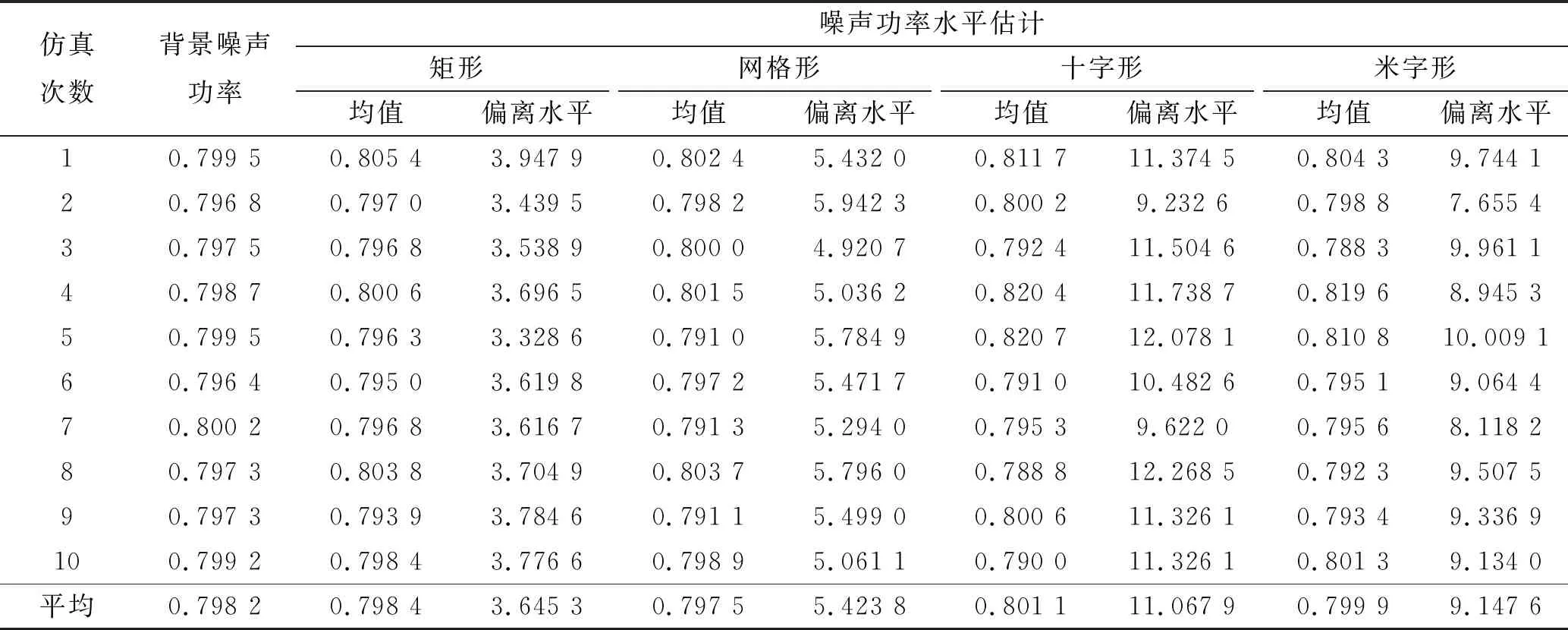
表1 滑窗大小为15时噪声功率水平估计值及偏离水平统计表
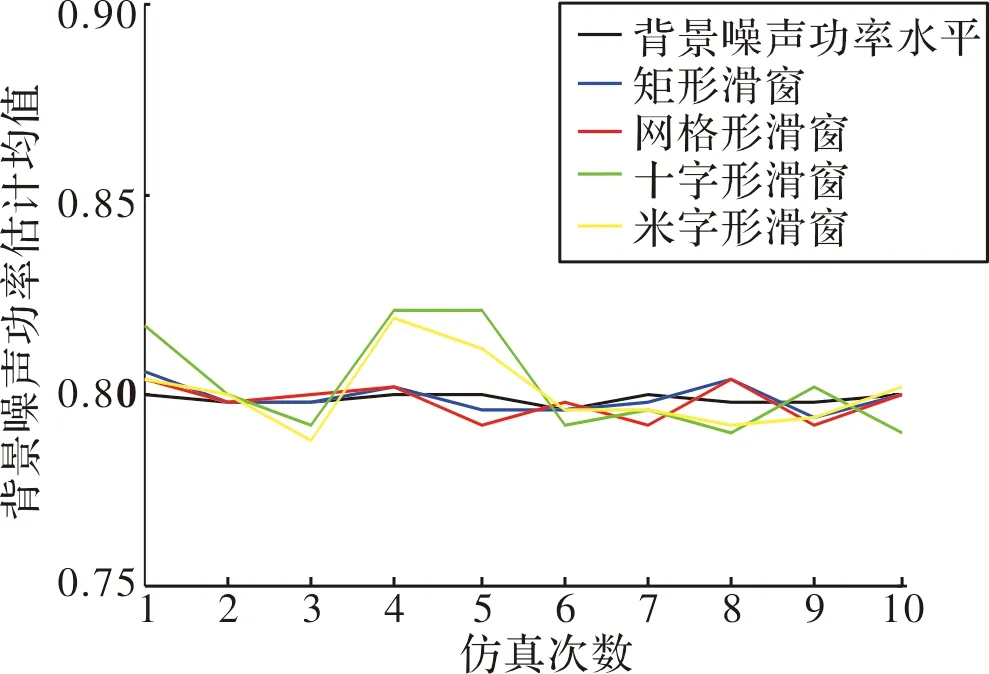
图7 参考滑窗大小为15时噪声功率水平估计趋势图
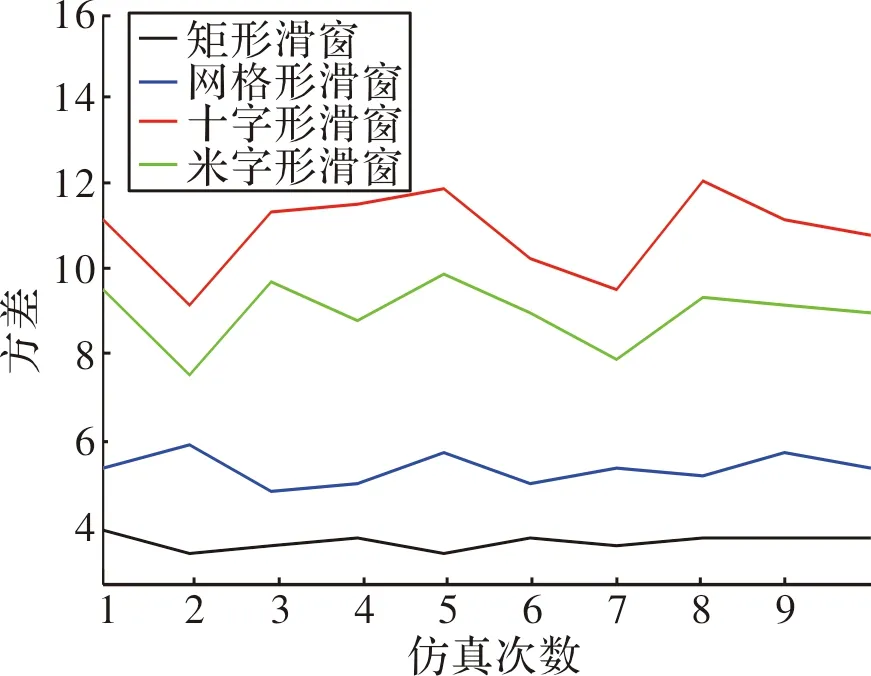
图8 参考滑窗大小为15时偏离水平趋势图
由图7和图8可以得到4种参考窗口内参考单元的噪声功率水平估计的均值和偏离水平变化趋势,矩形和网格形参考窗口稳定性和准确性要优于十字形和米字形参考滑窗,十字形和米字形滑窗在仿真试验中会出现大幅度偏离真实值的情况。
在相同仿真条件下对不同参考滑窗窗口大小的背景噪声功率水平估计性能进行10次仿真,不同大小滑动窗口内噪声功率水平估计偏离水平如表2所示。
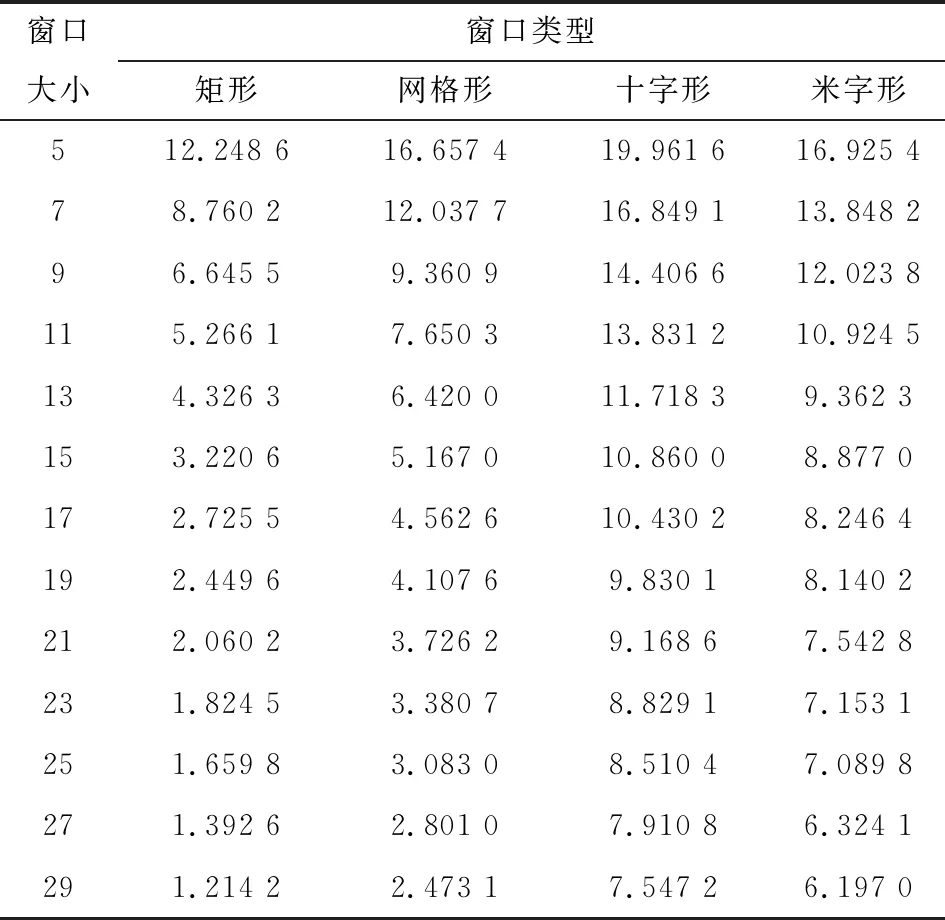
表2 不同大小滑动窗口内噪声功率水平估计偏离水平统计表
由表2获取的网格形、十字形及米字形不同参考滑窗大小对应的噪声功率水平估计偏离水平变化趋势图如图9所示。
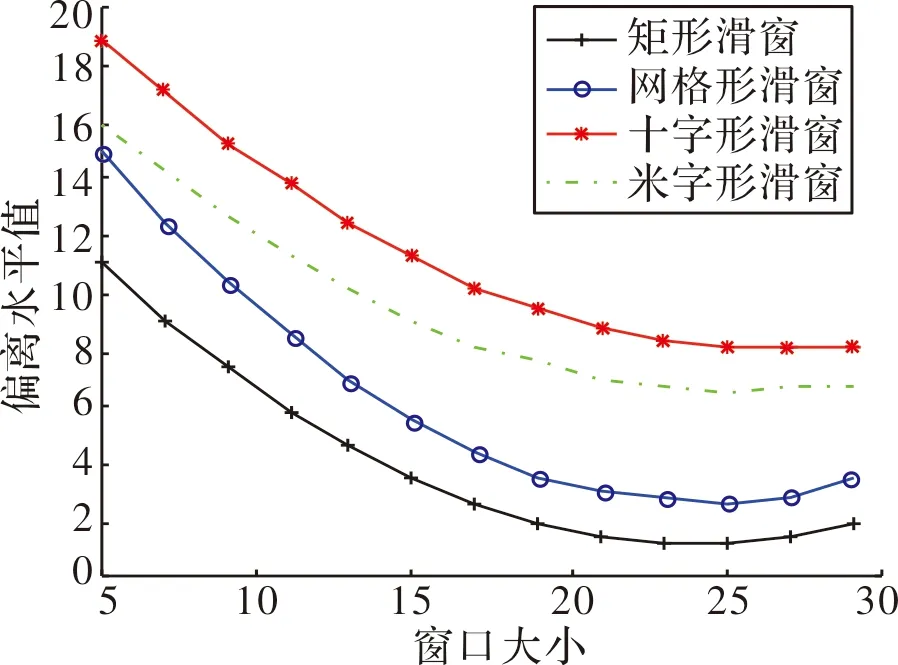
图9 不同大小窗口的噪声功率水平估计偏离水平趋势图
图9表明随着参考滑窗大小的增大,滑窗内参考单元对背景噪声功率水平估计趋于稳定。设定对噪声功率水平的偏离水平不超过5%(即Δδvar≤5)不会影响对目标信号的检测。可以看出,十字形和米字形滑窗随着窗口大小的增大对背景噪声功率水平的估计值的偏离水平逐渐趋近于5%,而矩形滑窗大小在13、网格形滑窗大小在15时已经满足了允许噪声估计值偏离水平。此时,网格形滑窗数据处理量为110,矩形滑窗数据处理量为161,网格形滑窗计算量更小。
综上分析可得,网格形参考滑窗对背景噪声功率水平估计的准确性和稳定性性能要强于十字形和米字形参考滑窗,数据处理的实时性要高于矩形参考滑窗,最佳检测窗口大小为15。
3 目标检测性能仿真分析
在岛岸背景噪声环境下,利用改进二维CFAR检测器网格形滑动窗口对多帧雷达回波信号图进行预处理,对不同信噪比目标检测性能进行仿真分析。仿真条件:假设岛岸背景噪声为均匀高斯白噪声,噪声功率水平为1,二维CA-CFAR检测器参考滑窗为网格形,窗口大小15×15,门限因子T=1,概率统计次数1 000次,仿真次数10次。对不同信噪比目标检测概率统计如表3所示。
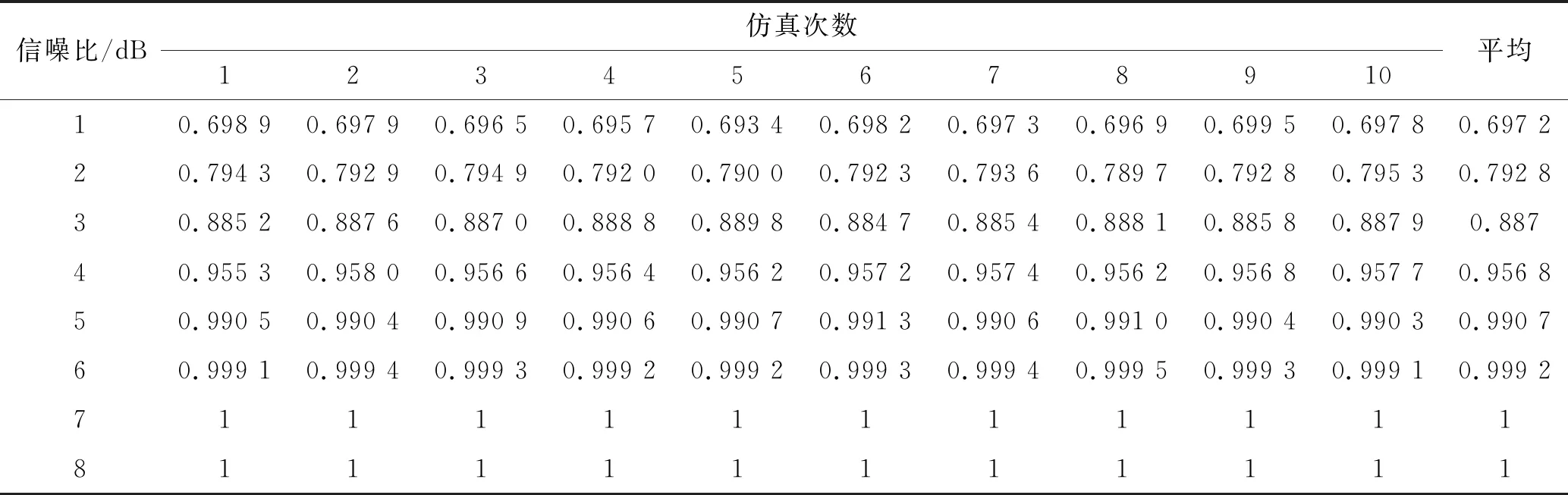
表3 不同信噪比目标检测概率统计表
由表3获得背景噪声下二维CA-CFAR检测器网格形参考滑窗对不同信噪比目标的检测概率变化趋势图。
由图10可知,当目标检测门限为背景噪声功率估计水平目标信噪比大于3 dB时,网格形参考滑窗对目标的检测概率能达到0.9以上;当目标信噪比大于6 dB时,能够完成对目标的准确检测;对信噪比低于3 dB的目标检测概率较低。为了实现对目标的准确检测,降低漏检率,需要降低检测门限,对不同信噪比目标检测门限设置及点迹筛选数仿真分析。
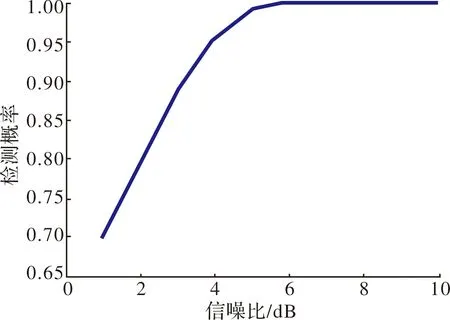
图10 网格形参考滑窗检测概率变化趋势图
仿真条件:岛岸背景噪声为均匀高斯白噪声,噪声功率水平为1,二维CA-CFAR检测器参考滑窗为网格形,窗口大小为13×13,概率统计次数1 000次,仿真次数10次。
二维CA-CFAR检测器网格形滑窗在窗口大小为13时对不同信噪比目标的检测门限值及对应的筛选能力统计如表4所示。
由表4获得的不同信噪比目标检测概率与门限值的变化曲线如图11所示。
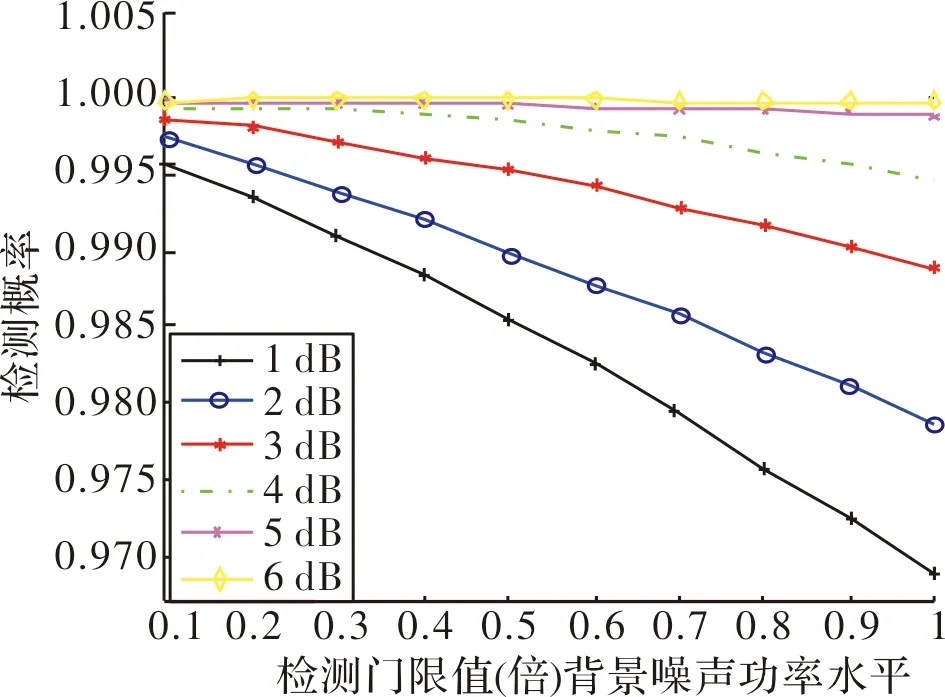
图11 不同信噪比及门限值下目标检测概率曲线
由表4分析目标信噪比、检测门限值设定及筛选目标点数的关系可以得出,目标信噪比不会影响检测门限对目标点迹的筛选,即目标点击筛选数与检测门限值是一一对应的关系,并不会随着目标信噪比的变化而发生大幅度的变化。对比图11,可以看出不同信噪比目标检测门限值与检测概率的关系,若对目标的检测概率达到99.5%时即可认为能够对目标实现准确检测,当目标信噪比达到4 dB时网格形参考滑窗能够实现对目标的准确检测;当目标信噪比为1 dB时为实现对目标的准确检测需要将检测门限值降为0.1倍的噪声功率水平估计值,目标信噪比为2 dB时需要降为噪声功率水平估计值的0.2倍;目标信噪比为3 dB时需要降为噪声功率水平估计值的0.5倍。在未知目标信噪比时,应以最小目标信噪比设置目标检测门限,从而达到对目标的准确检测减小漏警率,此时会加大数据处理量,点迹筛选量少,会降低数据处理效果。
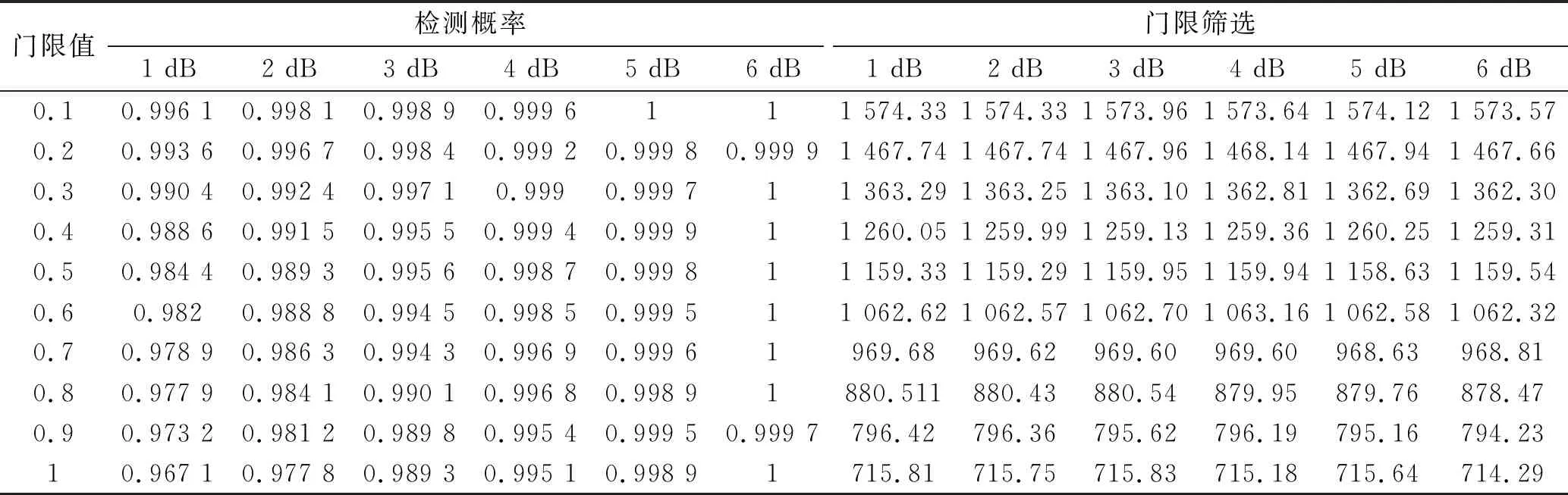
表4 不同信噪比目标检测性能统计表
4 总结
为了提升末制导雷达对低信噪比目标的检测性能,减小数据处理量,提高系统的实时性,通过对二维CFAR参考滑窗进行相应的技术改进,获得了改进的二维CFAR检测器网格形窗口对目标检测的数据处理技术。通过仿真分析,验证了网格形参考滑窗的背景噪声水平估计的稳定性和准确性,确定了最佳参考滑窗窗口大小。在最佳检测窗口下,对不同信噪比目标的检测概率进行了仿真,同时得到了不同信噪比目标的筛选门限值,为检测门限设置提供了参考依据。
