基于动态逆的多弹协同作战三维制导律研究
2021-07-30马泽远卢宝刚李墨吟夏群利
马泽远,卢宝刚,李墨吟,李 威,夏群利
(1 北京理工大学宇航学院,北京 100081;2 北京航天长征飞行器研究所,北京 100076)
0 引言
随着导弹技术的提高与反导防御技术的发展,传统的单枚导弹的作战模式受到巨大威胁。现代信息化战争愈发重视体系间的配合与协同作用,通过信息共享实现协调合作,使多枚导弹相互配合,增强整体作战能力,提升目标毁伤效能。因此,有必要开展多枚导弹协同打击制导策略的研究。
近年来,多导弹协同作战的研究逐渐受到国内外学者的广泛关注。Lee等[1]对多弹打击角度进行了控制,实现了多枚导弹在设定时间内,以指定的打击角度同时命中目标;赵恩娇等[2]设计了一种参数自适应多弹协同制导方法,结合非线性状态跟踪控制器设计与一致性理论提升了协同制导方法的收敛速度与鲁棒性;Jeon等[3]结合最优控制理论与线性化后的弹目相对运动模型,设计了一种攻击时间控制制导律;张曦等[4]基于De Bruijn网络结构,提出了一种分布式领弹-从弹制导策略,避免了对攻击时间的估计;Song等[5]以时间最短为性能指标,基于极大值理论,设计了带终端角度约束与攻击时间的制导律。但以上研究给出的是二维平面内多弹协同的制导控制方法,而导弹协同作战是一个三维空间内的运动过程,此时,上述制导律将不再适用。
针对领从弹模式下的三维空间多弹协同作战问题,基于俯仰与偏航通道的三维导引模型,提出了一种多弹协同作战三维制导律。首先,建立了弹目相对运动方程组,并设定了领弹与从弹的剩余时间误差函数。然后,基于三维纯比例导引律、时标分离原理、动态逆系统理论设计了领从弹间的剩余时间误差趋于零的多弹时间协同三维制导律,仿真结果验证了其有效性。
1 多弹三维空间协同模型
为简化问题,进行以下假设:1)忽略导弹的动态特性,并将导弹与目标视为质点;2)导弹上所受的力仅改变导弹速度方向,不改变速度的大小;3)打击的目标为舰船一类的静目标。
基于上述假设,建立导弹与目标的三维相对运动关系示意图如图1所示。
图1 导弹与目标的三维相对运动关系示意图
图1中,Oxyz表示惯性坐标系,RL,Ri分别为领弹、从弹与目标之间的弹目距离;VL,Vi分别为领弹、从弹的速度;θL,θi分别为领弹、从弹相对于视线方向的俯仰前置角;φL,φi分别为领弹、从弹相对于视线方向的偏航前置角;θLS,θiS分别为领弹、从弹的视线高低角;φLS,φiS分别为领弹、从弹的视线方位角。
根据图1所示的弹目相对运动关系,建立式(1)~式(2)所示的三维空间内导弹对目标的运动方程组。
(1)
(2)
式中,NyL,NzL,Nyi与Nzi分别为领弹与第i枚从弹的俯仰与偏航加速度,即领弹与第i枚从弹的控制量。
由于领弹-从弹协同打击模式中,从弹需要接收领弹的信息,因此,领弹的跟踪打击能力尤其重要。为提升领弹跟踪打击目标的能力,领弹采用如式(3)~式(4)所示三维纯比例导引。从弹在偏航通道上利用如式(5)所示的三维纯比例导引。
(3)
(4)
(5)
下面结合剩余时间估计与动态逆思想,设计从弹俯仰通道的控制量Nyi,使得领弹与从弹能够同时打击目标,实现多弹时间协同制导。
2 基于动态逆的多弹时间协同三维制导律设计
根据三维空间内导弹与目标导引几何关系,针对多弹协同精确打击目标的问题,利用式(6)~式(9)分别得到领弹与从弹的剩余时间[6]。
cosσL=cosθLcosφL
(6)
cosσi=cosθicosφi
(7)
(8)
(9)
通过设置较大的比例导引系数,使领弹与从弹在偏航方向快速收敛,并且利用动态逆思想,设计俯仰通道的控制量Nyi,使得领弹与从弹的弹道曲线曲率趋近一致,进而合理简化领弹与从弹的剩余时间方程,并构造剩余时间误差如式(10)所示[7]。
(10)
对式(10)求导得:
(11)


图2 多弹时间协同三维制导律设计流程
2.1 非线性慢变子系统动态逆设计

(12)
式中,kR为慢变子系统的带宽。

(13)
(14)
(15)


(16)
2.2 非线性快变子系统动态逆设计
对于快变子系统,为了使剩余时间误差变化率 满足期望的慢变子系统方程,设计快变子系统动力学如式(17)所示。
(17)
式中,kθ为快变子系统带宽。
(18)
3 仿真分析
假设1枚领弹带领3枚从弹打击目标的情况,协同制导过程中导弹的初始参数如表1所示。表中下标0表示初始值,(xm0,ym0,zm0)表示导弹在地面系的坐标。设导弹作匀速运动,且目标的位置为(500 m,500 m,500 m)。三维纯比例导引部分的比例系数取为kL1=kL2=ki1=10,kL3=ki2=5,子系统设计参数取为c1=0.7,c2=0.9,kθ=5。考虑到导弹逐渐飞向目标的需求与过载的约束,导弹的俯仰通道与偏航通道的可用过载为±10g。仿真结果如图3~图9所示。

表1 导弹初始参数
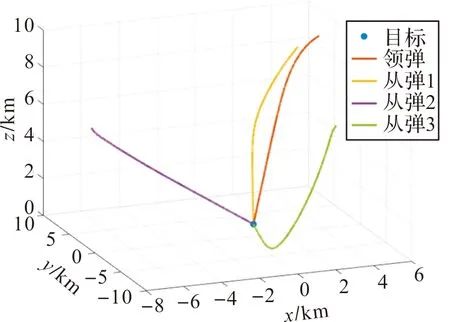
图3 导弹运动轨迹
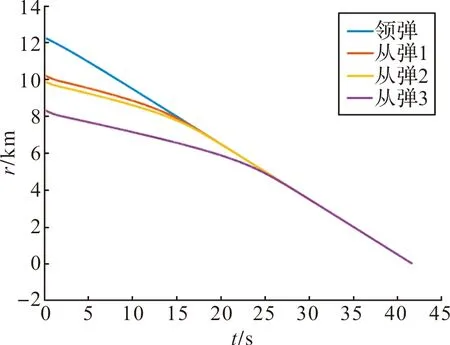
图4 弹目距离随时间变化
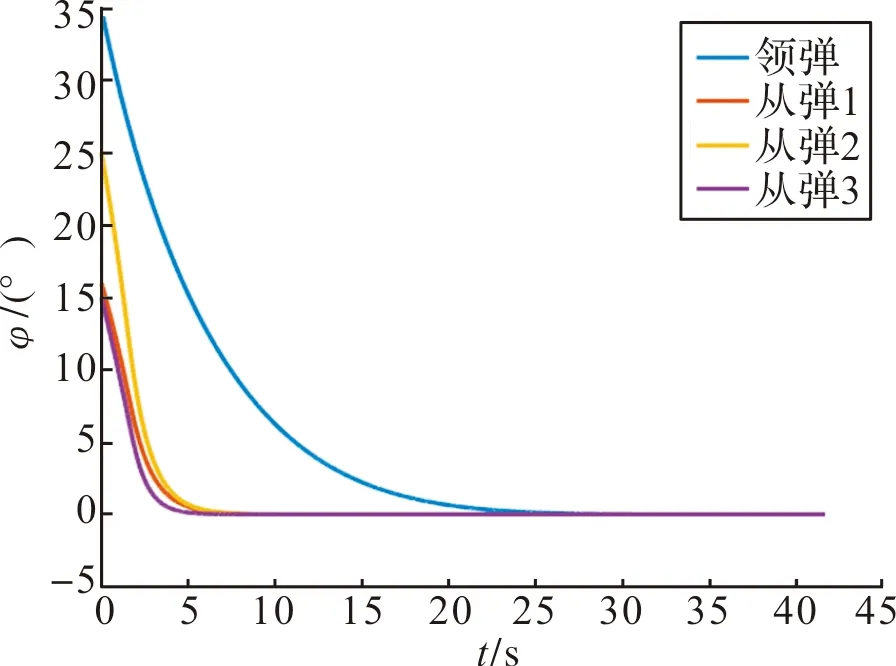
图5 导弹偏航弹道前置角随时间变化
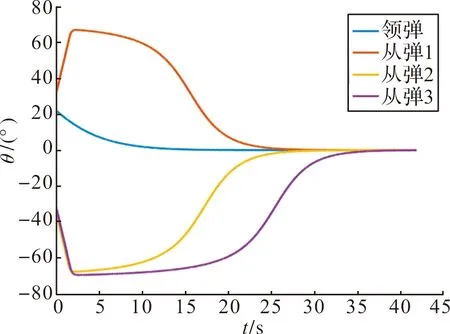
图6 导弹俯仰通道前置角随时间变化
图7 导弹俯仰通道控制量随时间变化
图8 导弹偏航通道控制量随时间变化
图9 导弹剩余时间误差随时间变化
综合图3和图4可以看出,初始时领弹与从弹从不同初始位置出发,领弹距离目标较远,为了达到时间协同,从弹以最大过载进行机动,使从弹的剩余时间趋近于领弹,最后在42 s左右领从弹同时命中目标,实现了多弹协同饱和打击的任务需求。此外,从图5~图9可知,在满足过载约束的前提下,提出的三维制导律在制导前期通过大过载,实现从弹偏航通道前置角快速高效收敛至零,进而使从弹位于俯仰平面内,并利用俯仰通道的动态逆控制使领从弹剩余时间误差迅速趋于零,完成了多弹时间协同,进而使得领从弹能够同时命中目标。
4 结论
针对三维空间内,多枚导弹协同作战导弹同时到达目标区域与同时攻击目标的任务需求,提出了由基于动态逆的多弹时间协同三维制导律。在飞行初期,通过合理设置比例系数,使导弹的偏航通道前置角快速收敛至零,进而使其俯仰平面内,并利用机动控制使导弹剩余时间误差趋于零,进而实现多弹有效协同打击。提出的协同制导律主要针对静止、低速移动目标进行设计,如何将本方法应用于协同打击机动目标与考虑攻击角度等约束有待进一步研究。
