光伏电池最大功率跟踪系统设计 ①
2021-07-28吴修权刘伟丽姜明明
吴修权,刘伟丽,姜明明
(山东农业工程学院机械电子工程学院,山东 济南 250000)
1 引言
在太阳能光伏发电系统中,初期投资费用高,并且系统能量转换效率低。太阳能电池受环境的影响严重,输出不稳定,效率差[1]。同时光伏电池的价格昂贵,转换率低,光伏系统的推广受到很大限制。最大功率点跟踪可以保证相同光照条件和硬件设备投入的前提下获取功率,获取最大发电量。最大功率点的跟踪可以在保持系统稳定性的同时提高光伏系统的利用率。本文采用了基于模糊控制的扰动观察法,具有响应速度快、控制精度高。系统稳定性好等优势。
2 系统设计
2.1 最大功率跟踪系统简介
当外部环境因素变化时,光伏电池的负载特性呈现非线性变化,如图1所示。
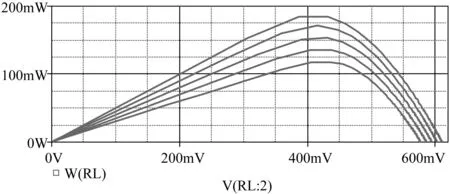
图1 光伏电池P-U曲线在不同光照强度下的变化Fig.1 Changes of PV cell P-U curve under different light intensity.
图1显示输出功率会随输出电压的变化而变化,在P-U曲线的最高点就是最大功率点。多条P-U曲线显示不同光照强度下,最大功率点所对应的电压不同。根据环境变化调整光伏阵列的工作电压使输出功率时刻保持最大。这就是本文研究的最大功率点跟踪。
2.2 系统方案选择
最大功率跟踪控制系统方案包括跟踪控制算法和控制电路两部分。
2.2.1 跟踪控制算法方案选择
跟踪控制算法主要有模糊控制法、恒压法、扰动观察法、最优梯度法、增量电导法等。从成本、复杂程度、精准度和响应速度等方面综合考虑本文选择扰动观察法。
扰动观察法原理是给工作电压一个小的扰动,输出功率随之变化。功率增大则继续原方向扰动,若减小则改变方向。通过系统分析选取DC-DC变换器的占空比为扰动对象,如果增加占空比光伏阵列输出功率增加,则继续增加,反之则减少[2]。
扰动观察跟踪算法硬件结构简单,被测量少,对传感器精度要求低,实现简单。但也存在缺点,引入扰动后系统会出现震荡,造成功率损失。因此扰动步长大小的选取要兼顾系统的动态性能和稳态性能。因此扰动观察法较适合用在光线强度变化较慢的场合。但因地域和环境的不确定性,光伏电池温度、负载和光照强度都是非线性,最大功率点也是时刻变化的。针对这样的非线性系统,使用模糊控制方法,将会获得更理想的效果。
综上所述,本系统采用基于模糊控制的扰动观察法,测量参数少、硬件要求低、控制算法简单,同时提高了系统的动态和稳态性能。
2.2.2 控制电路方案选择
光伏电路外接负载时改变时,输出功率会发生变化,当阻值匹配时输出功率最大。但现实中外部负载不可控,因而通过调节DC/DC电路PWM的占空比实现阻抗匹配。通过Pspice对电路进行仿真获得数据,使用MATLAB进行曲线拟合可得输出功率随占空比变化的关系曲线图。
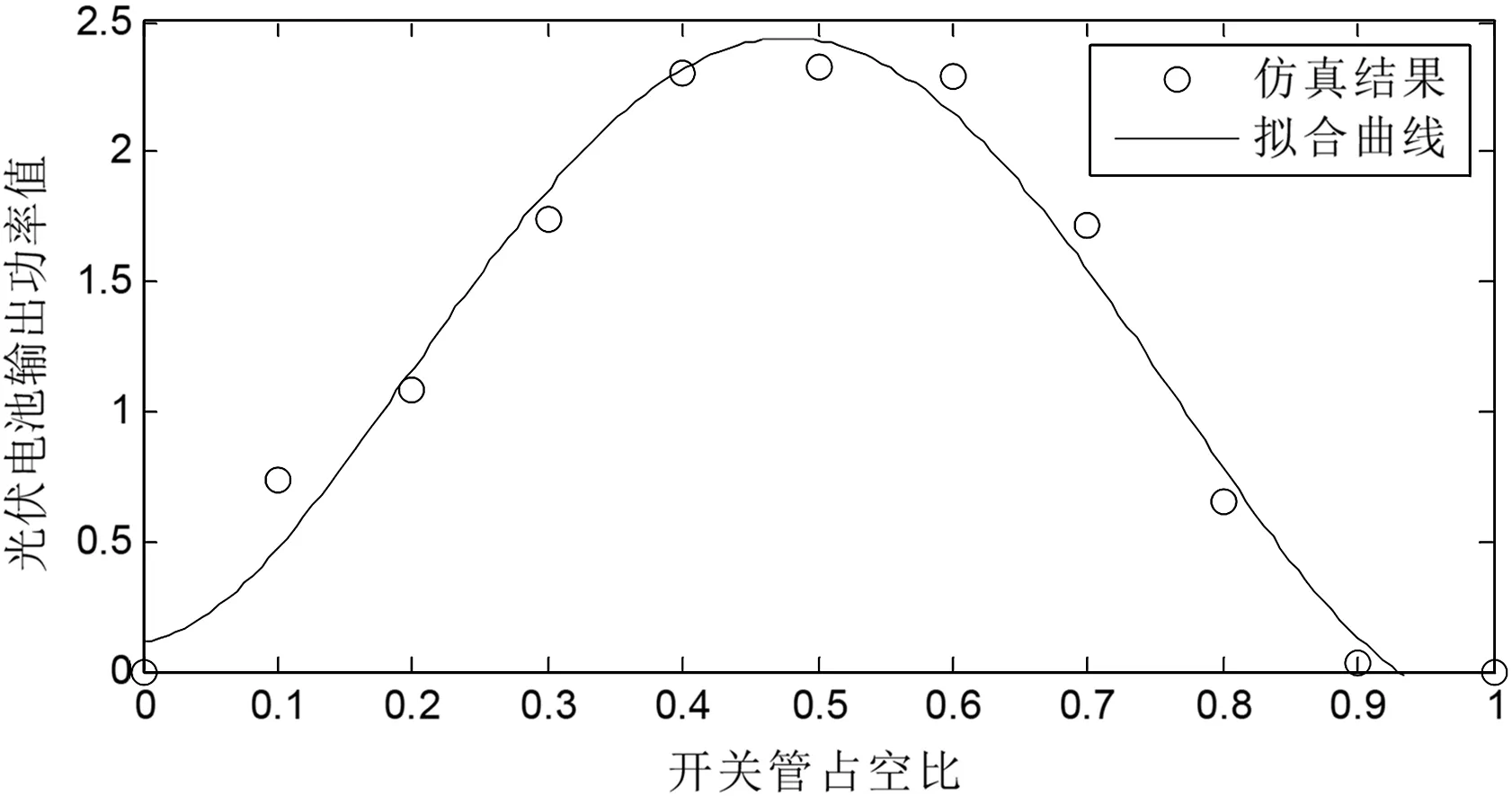
图2 输出功率随占空比变化的关系曲线图Fig.2 The relation graph of output power changing with duty ratio.
DC-DC变换器有BUCK变换器、BOOST变换器和BUCK-BOOST变化器三种类型。经过对比发现BOOST电路具有直流侧的电压配置更加灵活、输出电流纹波较小等优点。最大功率跟踪系统结构图如下。

图3 最大功率跟踪系统的结构图Fig.3 Structure diagram of maximum power tracking system.
2.3 最大功率跟踪控制系统设计
2.3.1 模糊控制算法设计
模糊控制采用双输入单输出结构,将输出功率作为系统的目标函数,占空比D作为控制变量。系统结构图如图4所示。
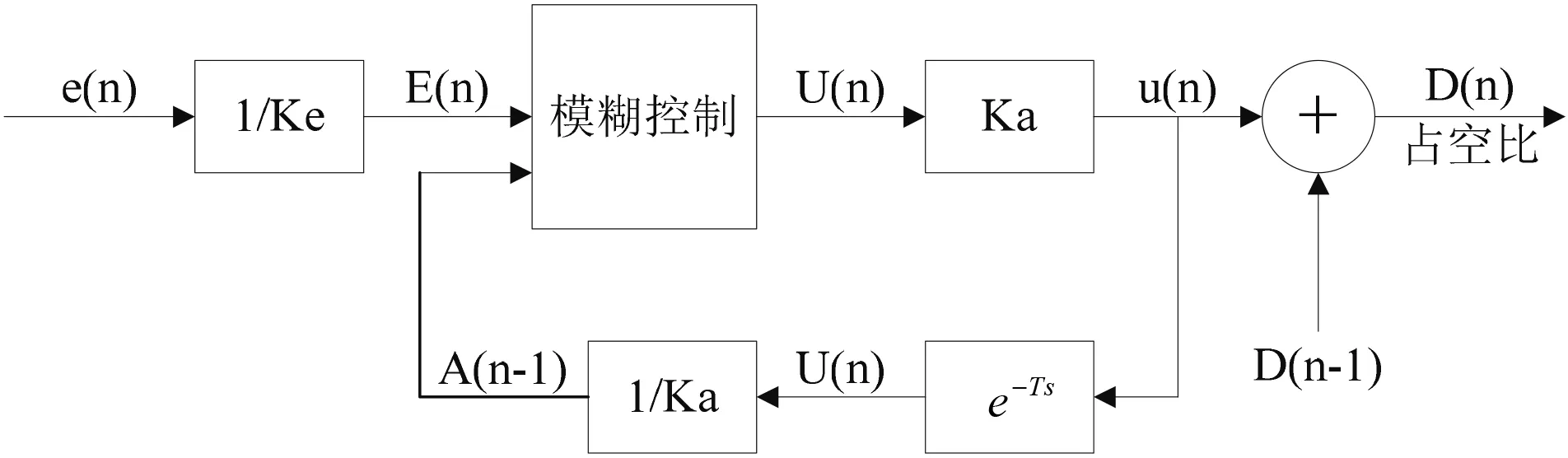
图4 模糊控制算法原理图Fig.4 Schematic diagram of fuzzy control algorithm.
模糊控制规则
(1)最大功率点较远处,采用较大步长加快系统响应速度;最大功率点附近,采用较小步长降低扰动的幅度,减少功率的损失。
(2)如果输出功率增加,则继续向原扰动方向调整,否则调整扰动方向。
(3)当处于最大功率点附近的极小区域时,系统保持稳定,避免震荡。
(4)当外界因素改变,输出功率发生明显变化时,系统快速做出反应,进行再次寻优[3]。
遵循控制规则,并对实际仿真结果进行调整确定最终模糊控制规则表。
模糊控制器动作一次,先将观测值数值输入到模糊控制器中,然后经过模糊化、模糊推理以及解模糊后,作用在被控对象上。这样控制系统较为复杂,实时性较差[4]。所以本系统通过离线方式计算得出观测值和对应的控制值的模糊控制表。
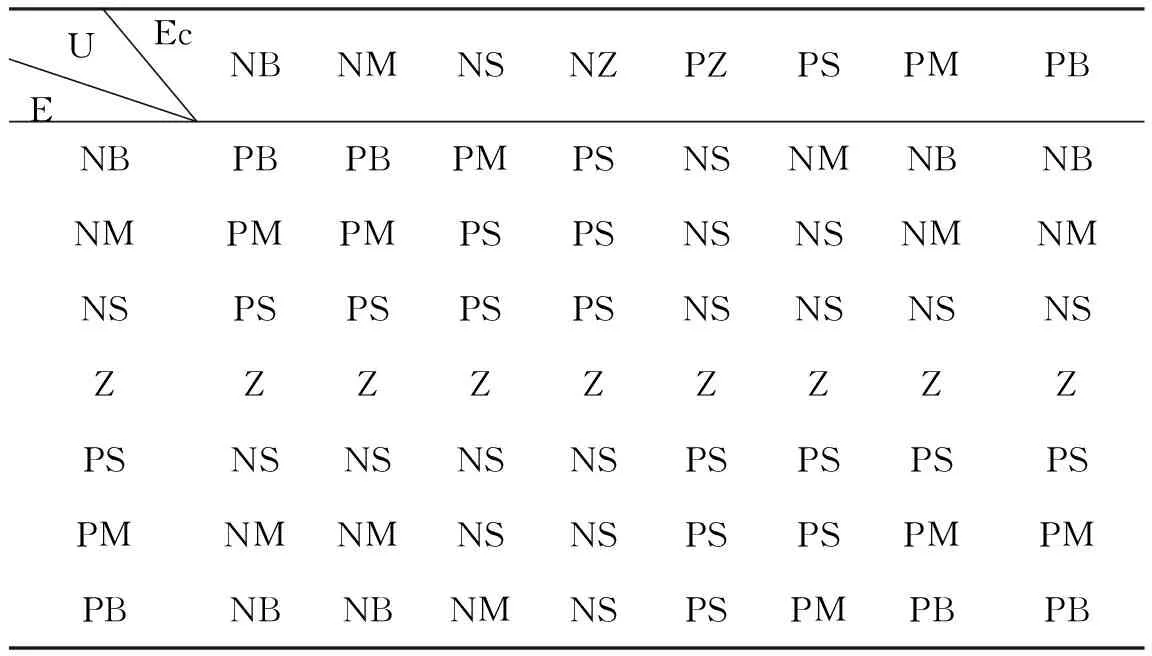
表1 模糊控制规则表Table 1 Fuzzy control rule table.
控制系统只需将E、Ec量化后,通过查表的方式即可完成输出,系统结构简单,运算过程减少,从而模糊控制系统实时性得以提升。
2.3.2 硬件设计
硬件系统的设计主要包括:变换电路,电压、电流采样电路和A/D电路。以变换电路为例讲述元器件参数的选择。
首先,分析BOOST电路中电感和电容对电路性能的影响,分别选取不同的电感和电容在Pspice软件中进行仿真,结果如图5和图6所示。

图5 不同电感值下的BOOST输出特性曲线Fig.5 BOOST output characteristic curves with different inductance values.
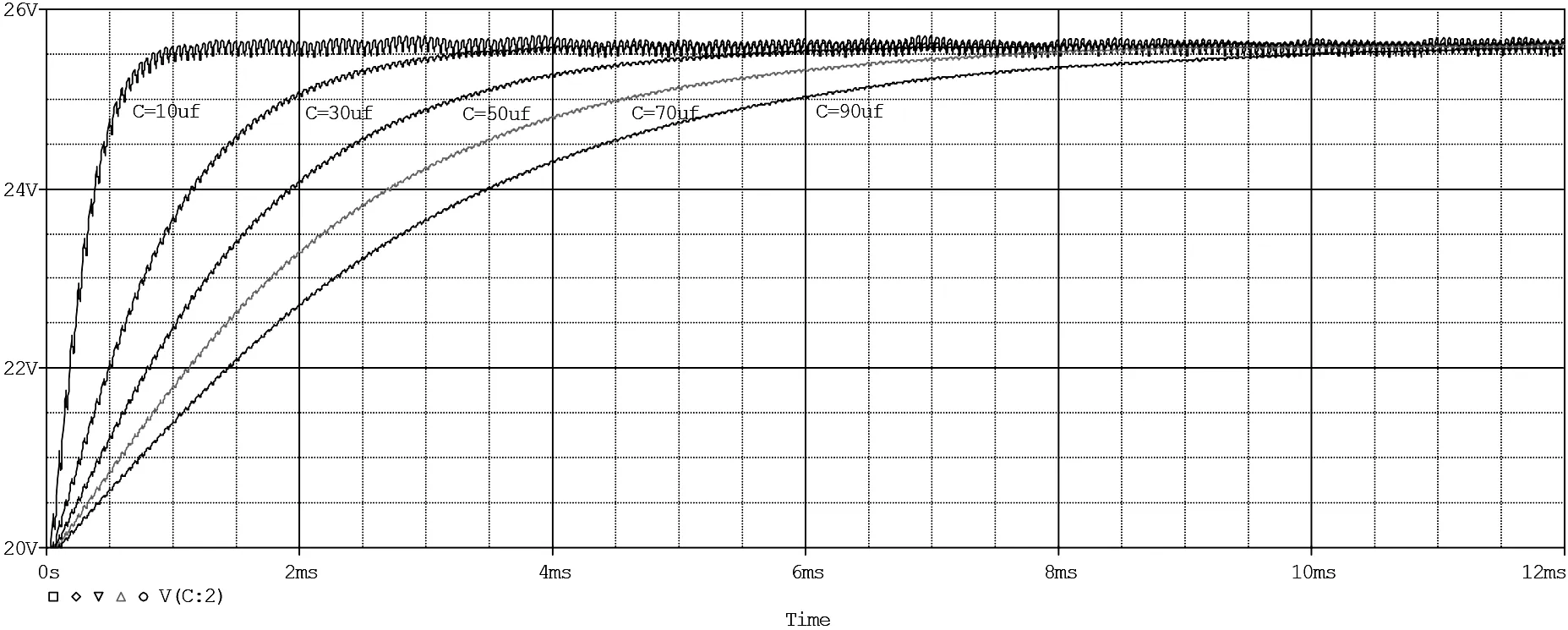
图6 不同电容值下的BOOST输出特性曲线Fig.6 BOOST output characteristic curves with different capacitance values.
电感值的选取影响输出电压和电感上的纹波电流,电容值的选取影响响应速度和电压波动幅度。在此,要求电感上的纹波电流小于20%,输出电压的纹波系数为1%。根据仿真结果选择电感1.5 mH,电容25 uF。
对不同的负载阻抗在Pspice中进行仿真,可得BOOST电路输出功率随负载阻值变化的曲线。
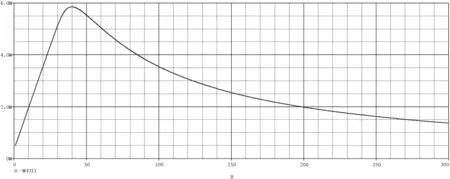
图7 BOOST电路输出电压随负载阻值变化的曲线Fig.7 BOOST circuit output voltage curve with load resistance.
由图可见,负载阻值从0开始增加时,输出功率先增加后减小,通过改变负载电阻可以达到最大功率输出,但实际中负载阻值不能随意改变。通过推导可得出内部等效电阻的表达式:
R′=RL(1-D)2
分析可知:R′值随着D值的增大而减小。所以系统采用改变占空比而改变内部等效电阻的方式来实现最大功率输出是可行的。图8为不同的占空比下BOOST电路输出功率的仿真波形图。
2.4 系统软件设计
软件程序的主要功能是检测当前光伏电池的输出功率,通过模糊控制调节电路中开关管的占空比,实现最大功率跟踪。系统软件采用Verilog硬件描述语言编写。
最大功率跟踪控制系统设计的程序流程图如图8所示。
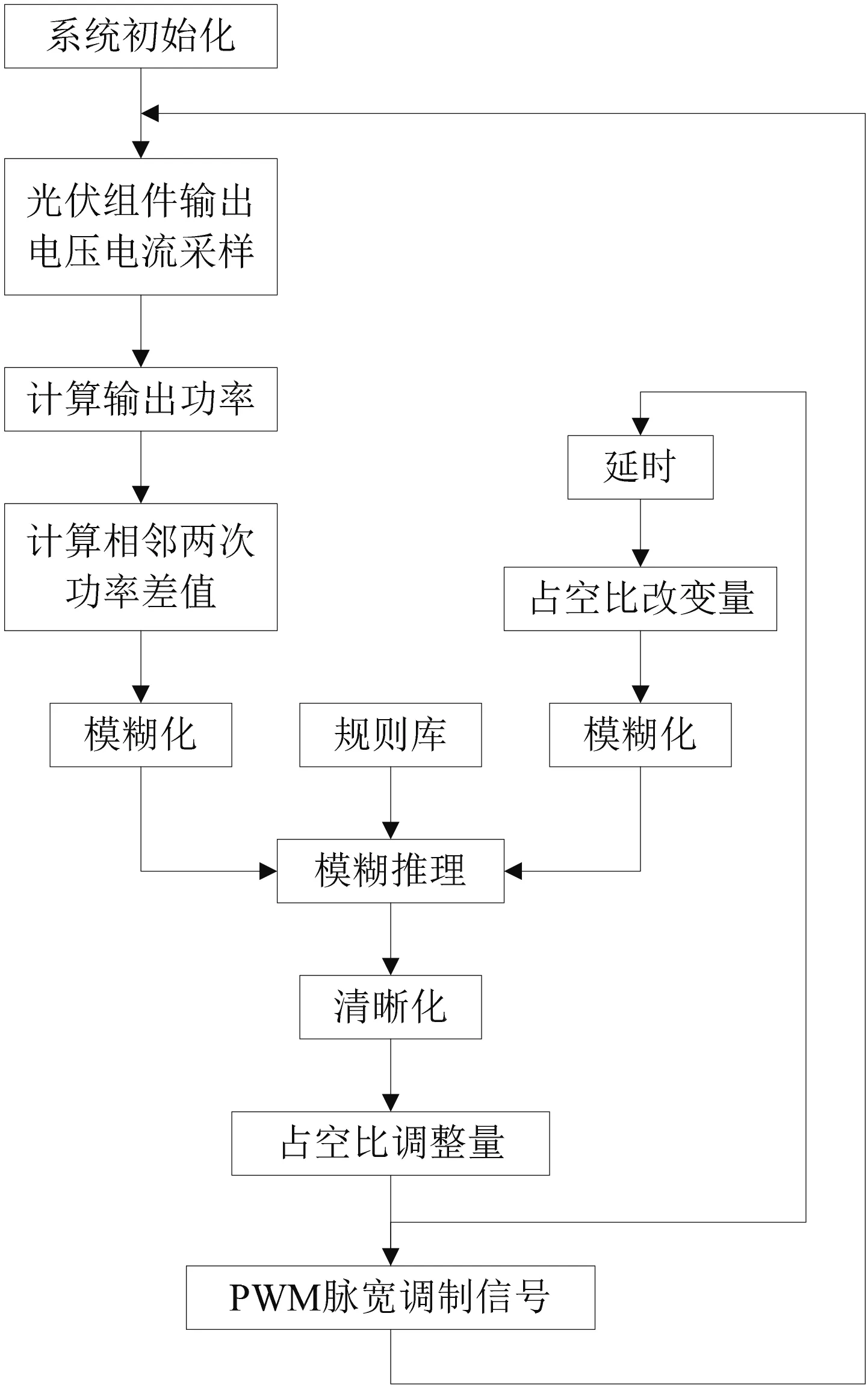
图8 最大功率跟踪控制系统程序流程图Fig.8 Maximum power tracking control system program flow chart.
跟踪控制系统可分成四个部分:数据采集模块、功率计算分析模块、模糊控制器模块和PWM信号产生模块。其功能结构框图如图9所示。
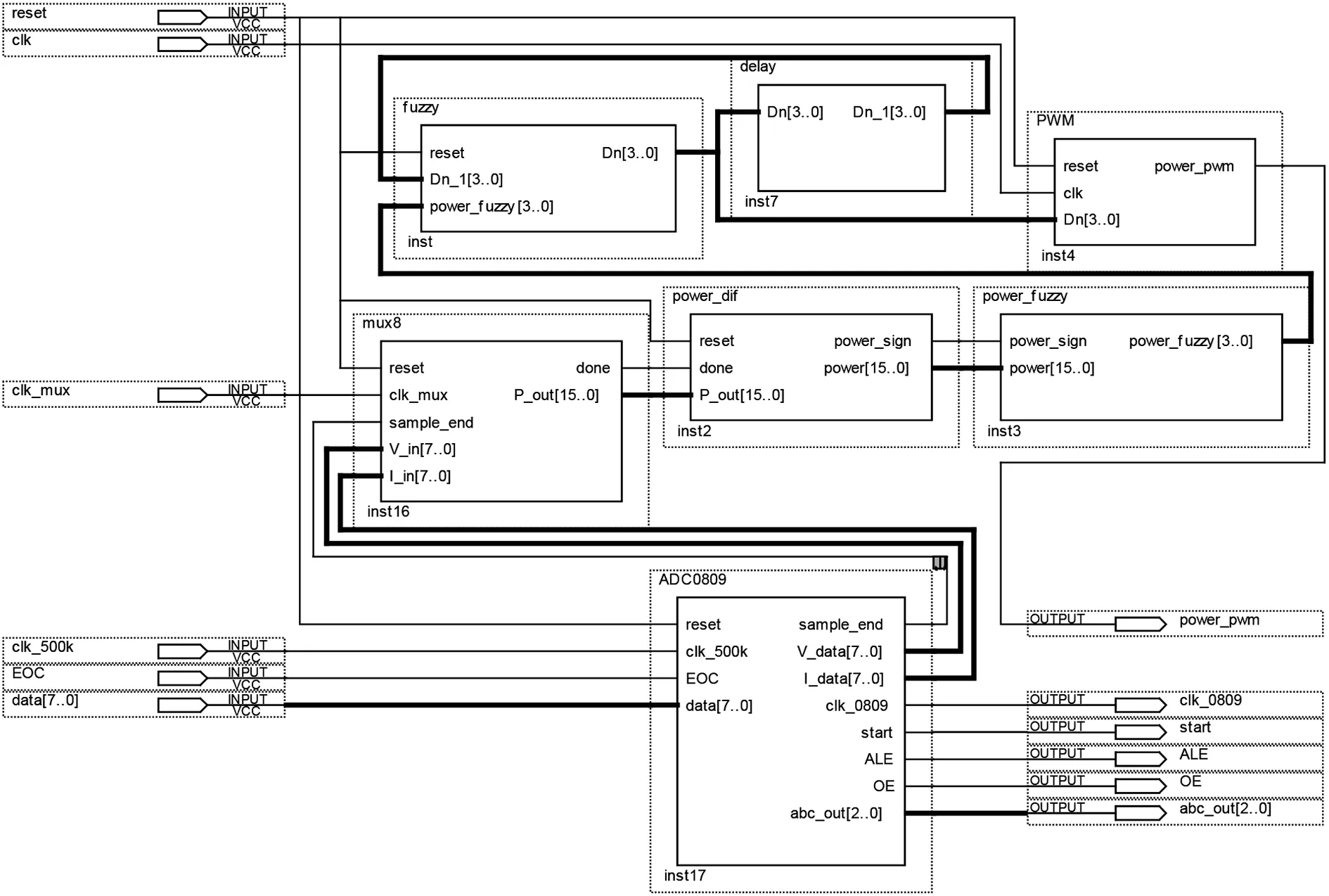
图9 最大功率跟踪系统硬件设计程序流程图Fig.9 Flow chart of hardware design program for maximum power tracking system.
3 结果验证
对PWM模块进行仿真,可得仿真结果图如图10所示。

图10 PWM模块波形仿真结果图Fig.10 WM module waveform simulation result diagram.
对整个控制系统整体仿真波形图如图11所示。

图11 最大功率跟踪控制系统仿真波形图Fig.11 Maximum power tracking control system simulation waveform.
4 结论
本文提出了基于模糊控制的扰动观察法。通过控制BOOST电路开关的占空比来调节内部等效电阻的方式实现最大功率跟踪。响应速度快、硬件电路结构简单、避免震荡造成能量损失,提升了光伏发电系统的动态性能和稳态性能。