有轨电车槽型轨反超高曲线通过动力性能研究
2021-07-21翟贝贝任尊松
翟贝贝 任尊松 曲 村
(1.北京城建设计发展集团股份有限公司, 100037, 北京; 2.北京市轨道结构工程技术研究中心, 100037,北京; 3.城市轨道交通绿色与安全建造技术国家工程实验室, 100037, 北京; 4.北京交通大学机电学院,100044, 北京∥第一作者, 工程师)
有轨电车在曲线上运行时,一般情况下曲线区段外轨相对于内轨设置超高,这种超高设置方式称为正常超高。但在某些地形特殊地段,工程上希望设置内轨高度大于外轨高度,这种情况称为曲线反超高。例如,当列车绕过1座山坡时,在地形上曲线内侧高度大于外侧高度,如果按照正常超高设置则需在曲线内侧挖掉大量土方或在曲线外侧填筑大量土方,从而导致建设成本的增加。随着越来越多的城市规划和建设有轨电车,尤其是云南省,以及青岛、重庆等山区较多的省市,上述反超高现象较普遍。但目前相关标准只涉及正常超高,尚未对反超高曲线的设置及车辆通过的安全性等问题进行研究。为此,本文拟在建立有轨电车动力学模型和槽型轨轨顶外形模型的基础上,研究列车以不同速度通过不同反超高量曲线时系统的运行安全性和乘客的乘坐舒适性[1-3],并提出合理的列车反超高曲线通过速度范围。
1 系统动力学建模
1.1 车辆动力学建模
本文以沈阳有轨电车作为建模参考。沈阳有轨电车为100%低地板有轨电车,利用SIMPACK多体动力学软件,建立了该型列车的动力学模型。列车模型由3个模块连接而成,其中:位于两侧的模块分别为头车和尾车(头、尾可互换),位于中间的模块为中间车。头车、中间车、尾车间各设1个转向架,头车和尾车的长度均为11.8 m,中间车的长度为3.6 m。头车和尾车的转向架采用非独立轮对,中间车采用独立轮对。头车和中间车之间、中间车与尾车之间采用球形铰接。轮对的名义滚动圆半径为0.33 m。该列车系统中,各车辆的主要质量、转动惯量如表1所示,悬挂参数如表2所示。
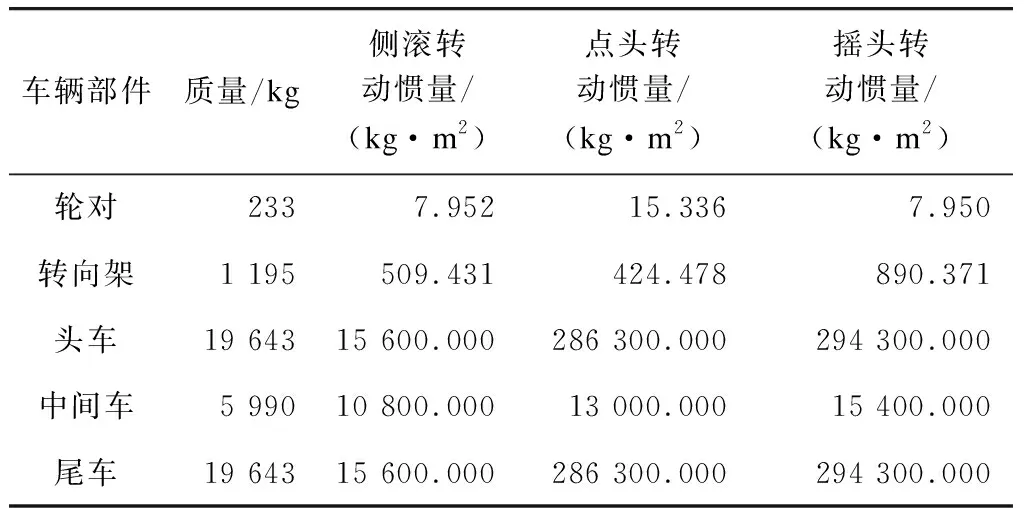
表1 有轨电车的质量及转动惯量参数表
1.2 线路设置
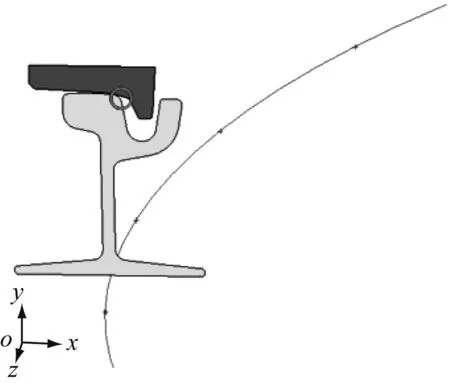
轨道采用槽型轨R60,其右轨的横截面如图1所示;相应的车轮踏面类型参照欧洲标准,磨耗性踏面与槽型轨相匹配。采用标准轨距1 435 mm。列车运行线路工况为曲线通过,如图2所示。曲线上各分段线路的长度分别为:两端直线长度均为50 m,两端缓和曲线长度均为50 m,中间圆曲线长度为150 m。曲线半径为150 m。
沈阳有轨电车转向架轮对的内侧距为1 380 mm,轮缘厚度为22.63 mm,对应的轮轨间隙较小,两侧轮轨间隙总量仅为9.74 mm,单侧仅为4.87 mm,因此理论上可以认为采用槽型轨的有轨电车轨道,其激扰不平顺量应比地铁或轻轨线路的激扰不平顺量小。按照结构设计,槽型轨为混凝土包围浇筑,轨道质量更为稳定,轨道病害较少。基于上述因素,本文采用美国六级谱作为轨道激扰[4]进行数值计算、分析和研究。

表2 有轨电车的悬挂参数表
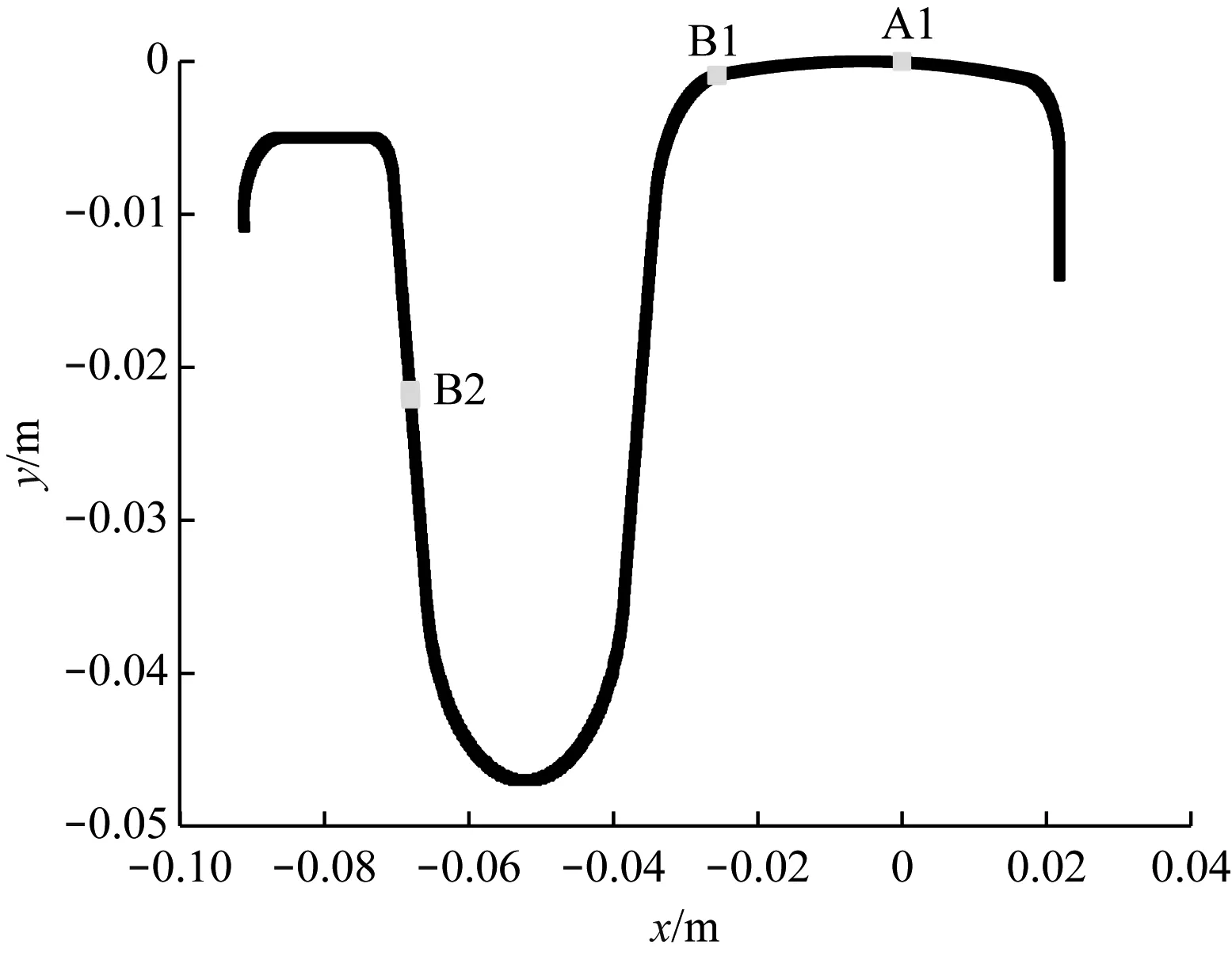
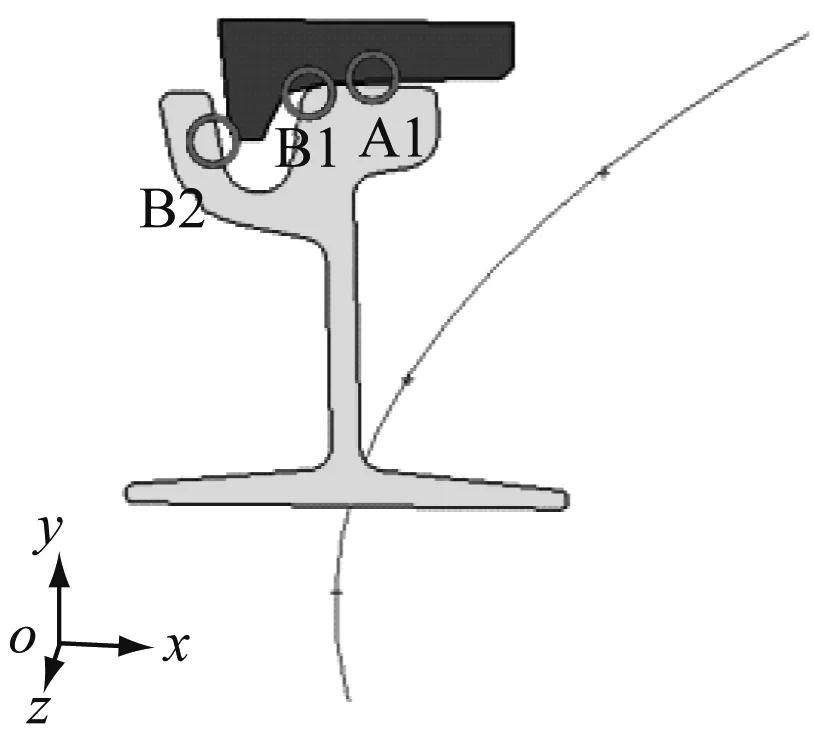
注:A1——槽型轨轨顶接触斑位置;B1——槽型轨轨肩接触斑位置;B2——槽型轨护轨接触斑位置;x——槽型轨断面宽度方向坐标; y——槽型轨断面高度方向坐标。
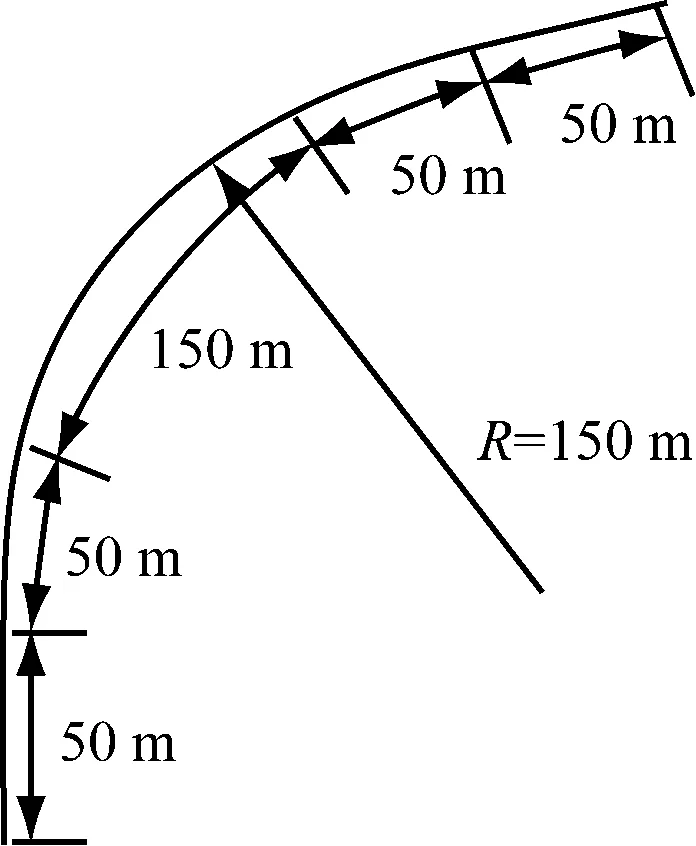
图2 有轨电车行驶线路的曲线参数
2 轮轨系统安全性分析
2.1 轮轨力分析
2.1.1 有轨电车通过曲线时的轮轨接触情况
有轨电车通过曲线时的轮轨接触情况如图3所示,图3 a)中圆圈位置表示外侧轮轨接触斑位置,图3 b)中圆圈位置表示内侧轮轨接触斑位置。一般地,外侧轮轨之间只有1个接触点,但内侧轮轨之间存在2种接触工况[5-6]。大部分时间内侧轮轨为单点接触,且接触斑中心位于点A1,如图3 b)中的A1点所示;但某些离散短时间内内侧轮轨为两点接触,且两点接触斑的组合不尽相同,有时为A1和B1,有时为A1和B2,同1个时刻内最多出现2个接触斑,B1、B2为不同时刻下的第2接触斑。事实上,轮轨两点甚至更多点接触在相关文献中已有研究和验证。
从作用力上看,由于为曲线通过且存在内轨超高,轮对在离心力和重力分量的作用下向外侧移动,致使外侧轮轨的垂向力和横向力均大于内侧轮轨相应的垂向力和横向力。在圆曲线区段,受轨道激扰影响,尤其是在方向不平顺的影响下,外侧车轮的轮缘与轨肩接触,内侧车轮的轮背不时与护轨(B2处)接触;内侧车轮的轮缘不时与轨肩(B1处)接触,产生较大的横向冲击力,进而引起内外侧轮轨力不断发生波动变化。
a) 外侧轮轨及其走向线
b) 内侧轮轨及其走向线
2.1.2 轮轨垂向力和横向力
图4是列车通过速度为32.400 km/h(9 m/s)、反超高量为20 mm情况下,第1位轮对内外侧车轮对应的轮轨垂向力Fv和横向力Fh。图4 b)中的内侧轮轨横向力是车轮2个接触斑(A1与B1,或者A1与B2)上横向力之和。
图5为同等条件下第1位轮对内侧轮轨各接触斑上的Fh,其中:第一接触斑A1始终存在,A1的轮轨横向力为正值;第二接触斑B1或B2仅在某些离散的短时间段内出现,设Fh,B为第二接触斑的轮轨横向力,B1、B2上的Fh方向是相反的。当Fh,B为0时,代表没有第二接触斑出现,只有第一接触斑A1;当Fh,B为正值时,代表第二接触斑B1出现;当Fh,B为负值时,代表第二接触斑B2出现。
2.1.3 各个工况下的轮轨力计算
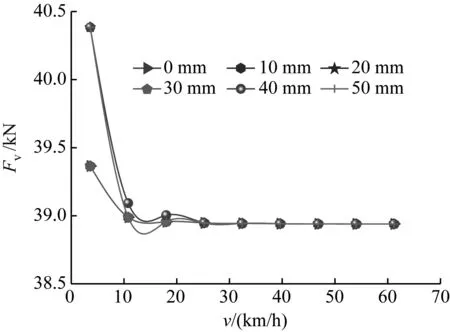
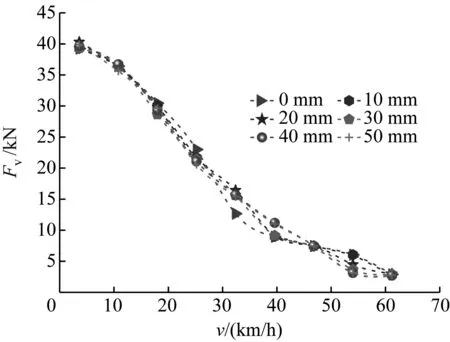
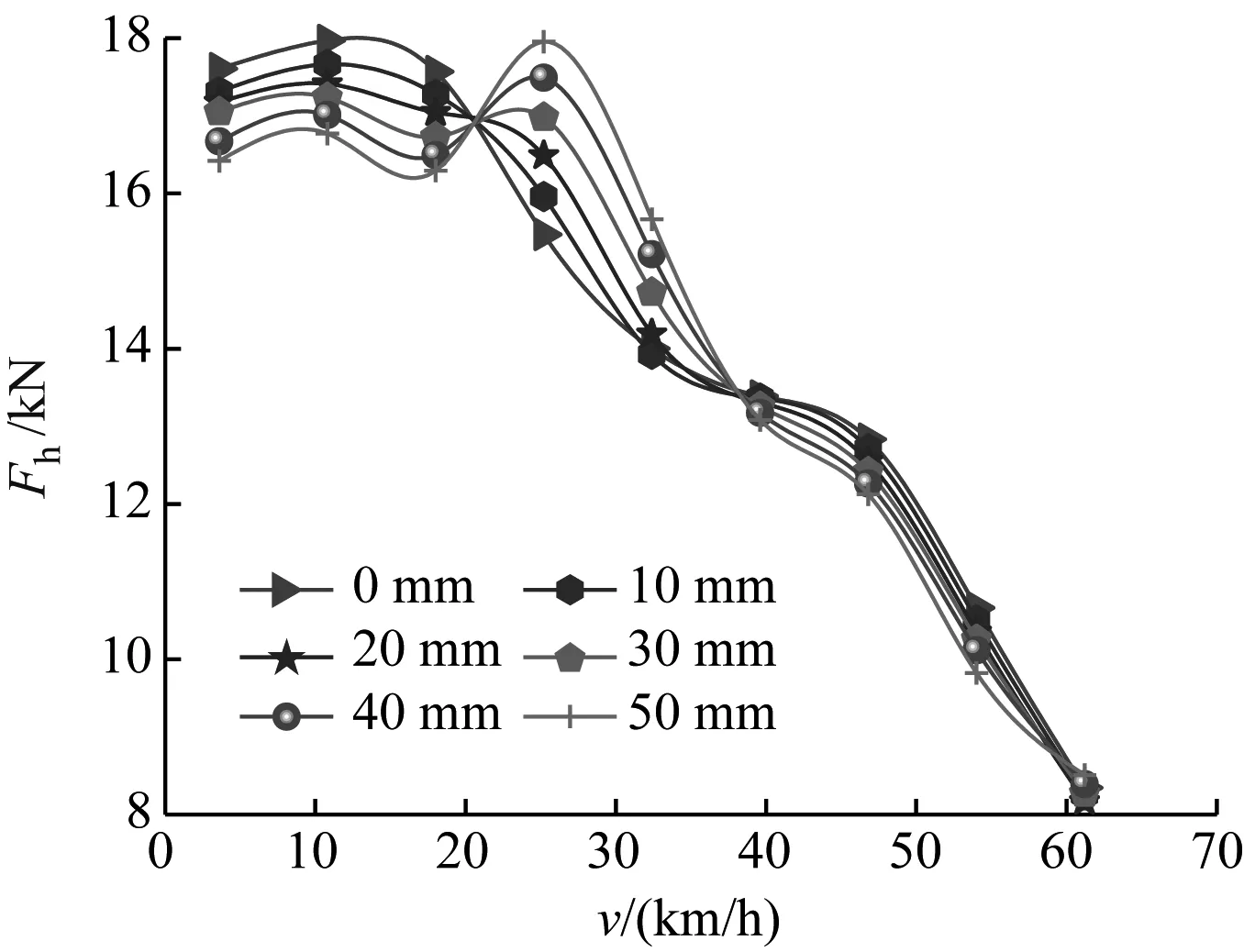
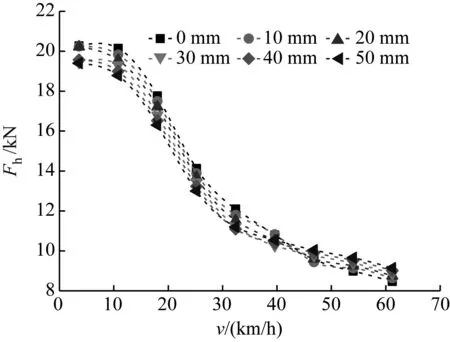
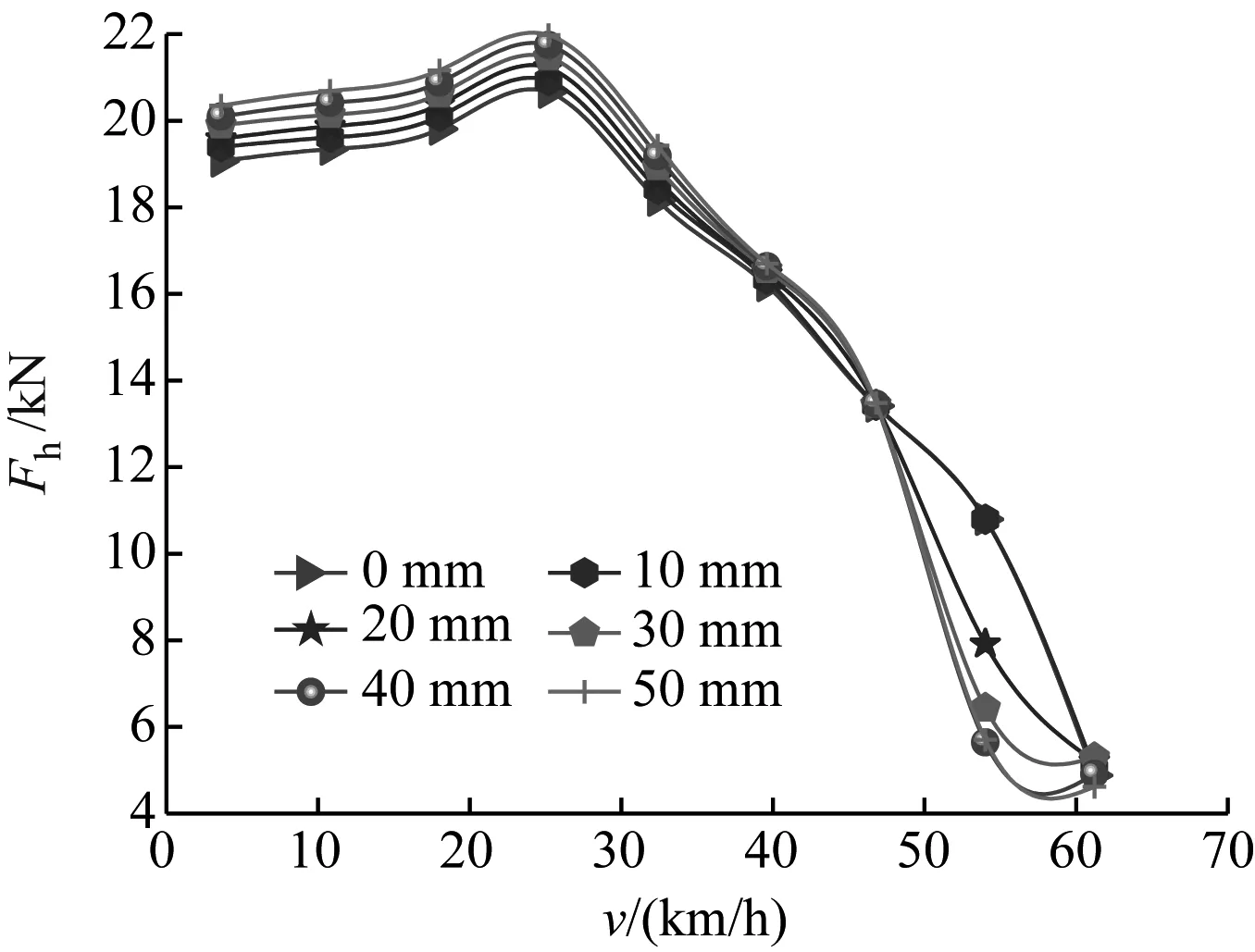
本文着重列车在不同的运行速度下通过不同反超高量曲线工况时的系统安全性和舒适性,用以确认不同反超高量的曲线通过速度。设置反超高量分别为0 mm、10 mm、20 mm、30 mm、40 mm和50 mm等6种工况[7]。选取的列车运行速度分别为3.600 km/h、10.800 km/h、18.000 km/h、25.200 km/h、32.400 km/h、39.600 km/h、46.800 km/h、54.000 km/h和61.200 km/h。依据动力学相关标准[8],数据处理滤波频率为20 Hz,对应的时间为0.05 s。图6为各个工况下内外侧车轮的Fv峰值。图7为各个工况下内侧轮轨各接触斑的Fv峰值。图8为各个工况下内外侧车轮的Fh峰值。图9为各个工况下内侧各接触斑的Fh峰值。
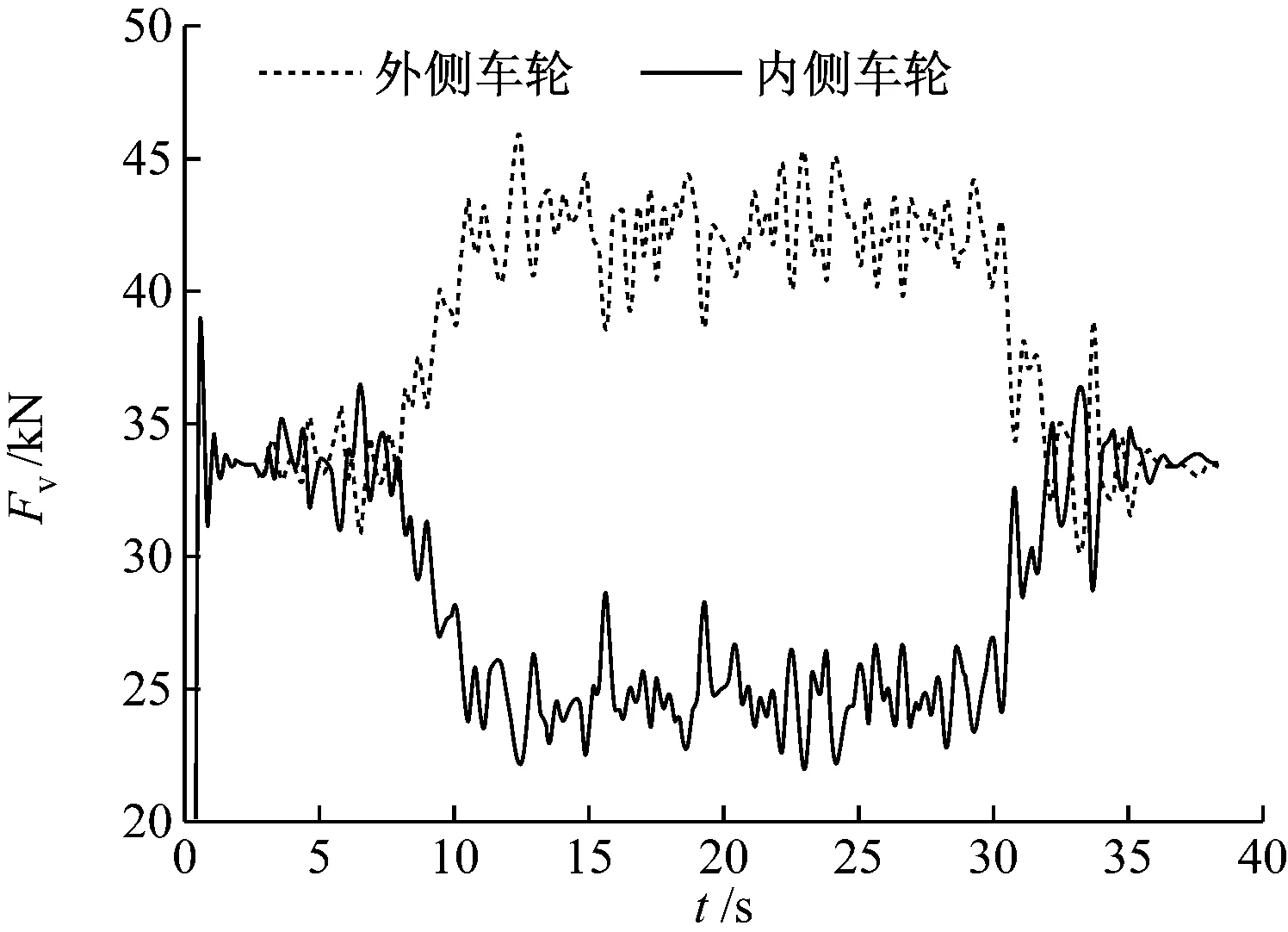
a) Fv
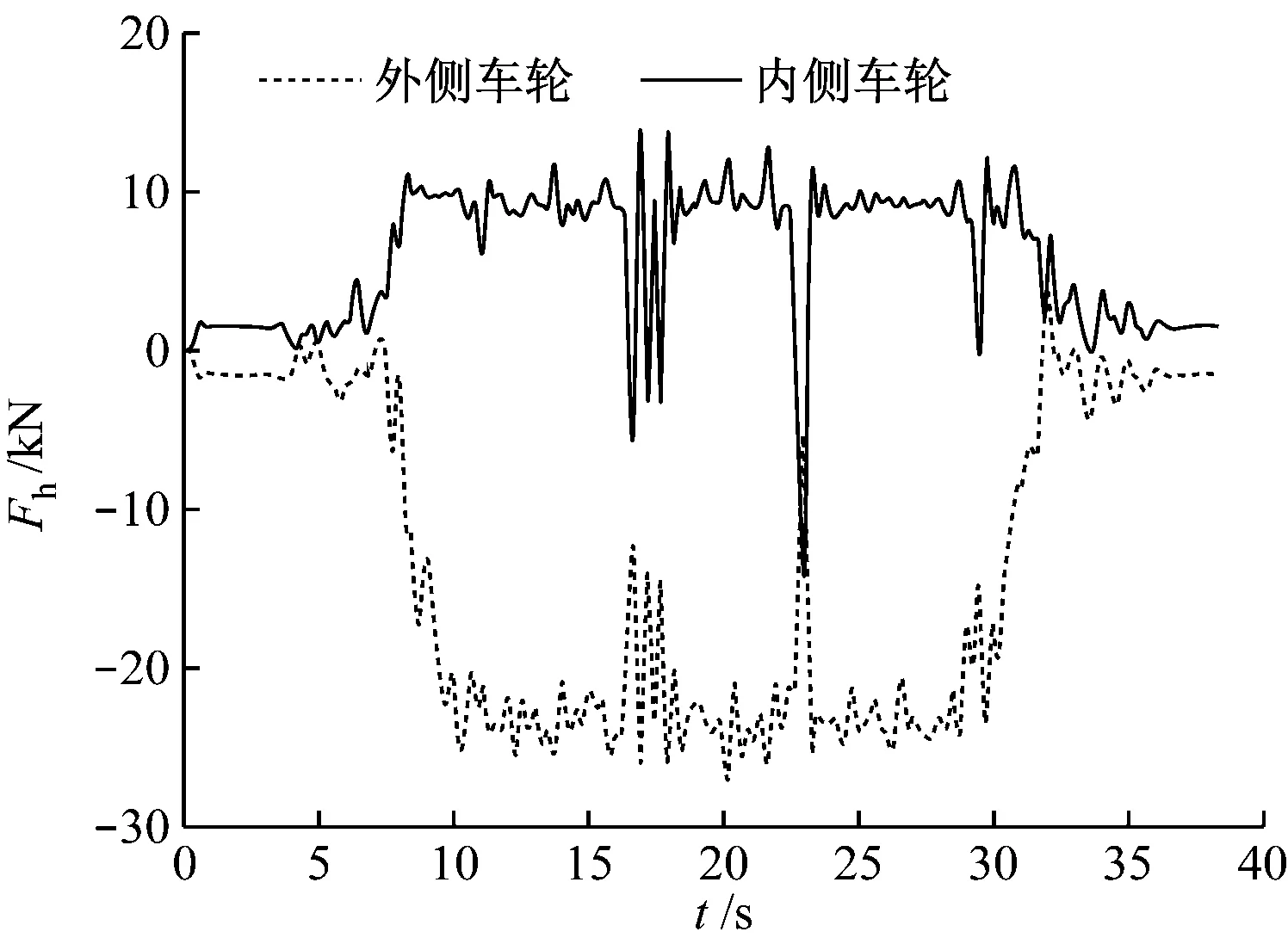
b) Fh
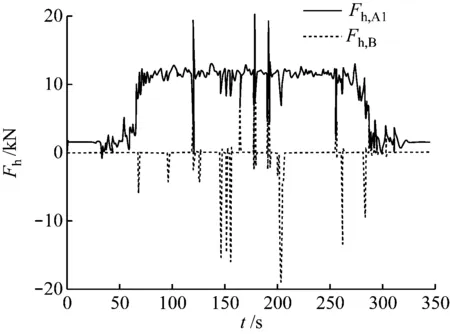
图5 内侧轮轨各接触斑的Fh
由图6~9可知:在反超高和激扰的影响下,外侧轮轨垂向力随速度和反超高量的增加不断增加,A1处的垂向力不发生明显变化,B1、B2处的垂向力随着速度的增加呈现明显降低的趋势;不同工况下Fh峰值均未超过安全限值40 kN。
当反超高量不变的情况下,随着列车运行速度的增加,内外侧轮轨的垂向力和横向力呈现出以下发展规律:
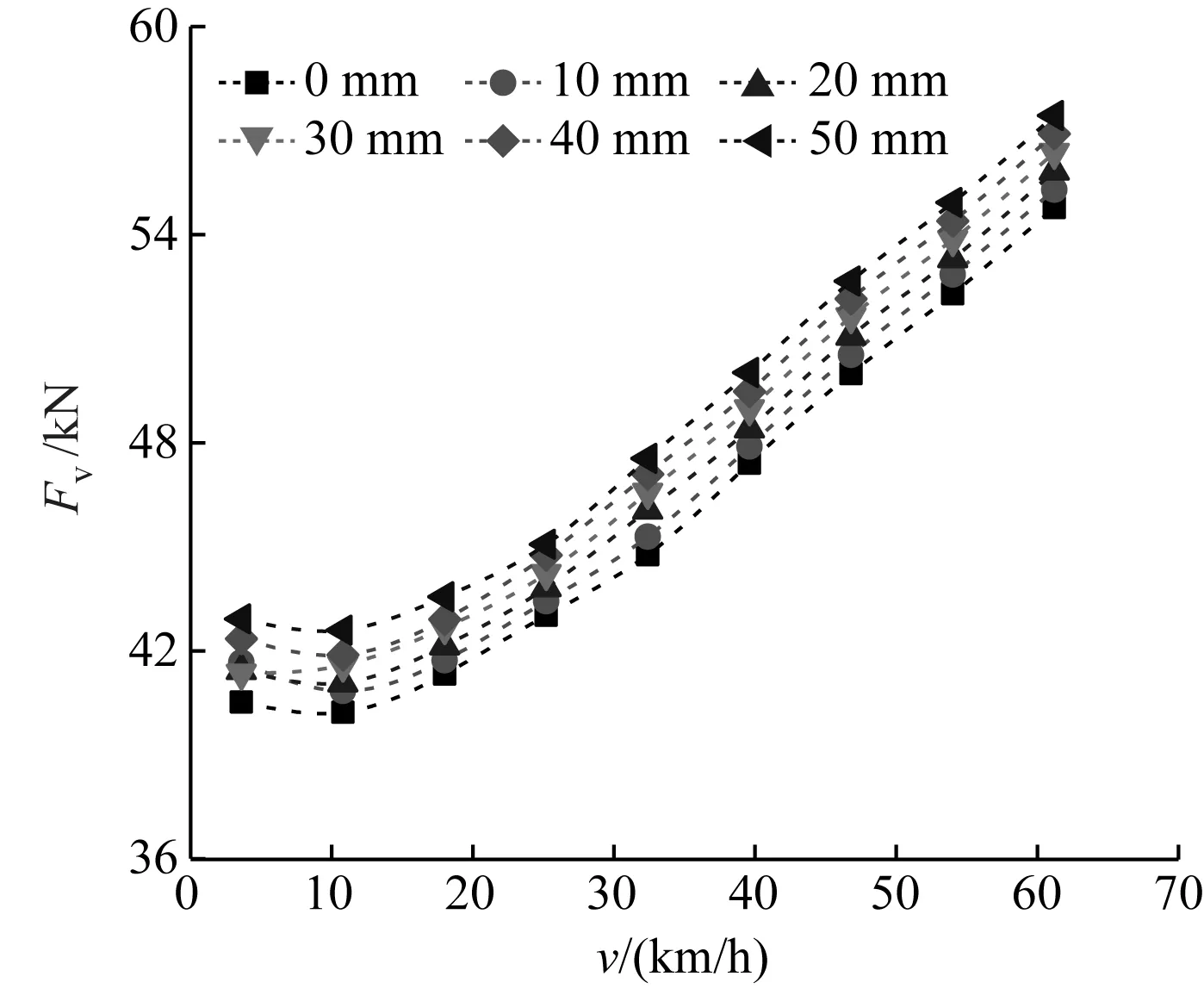
a) 外侧轮轨的Fv峰值
b) 内侧轮轨的Fv峰值
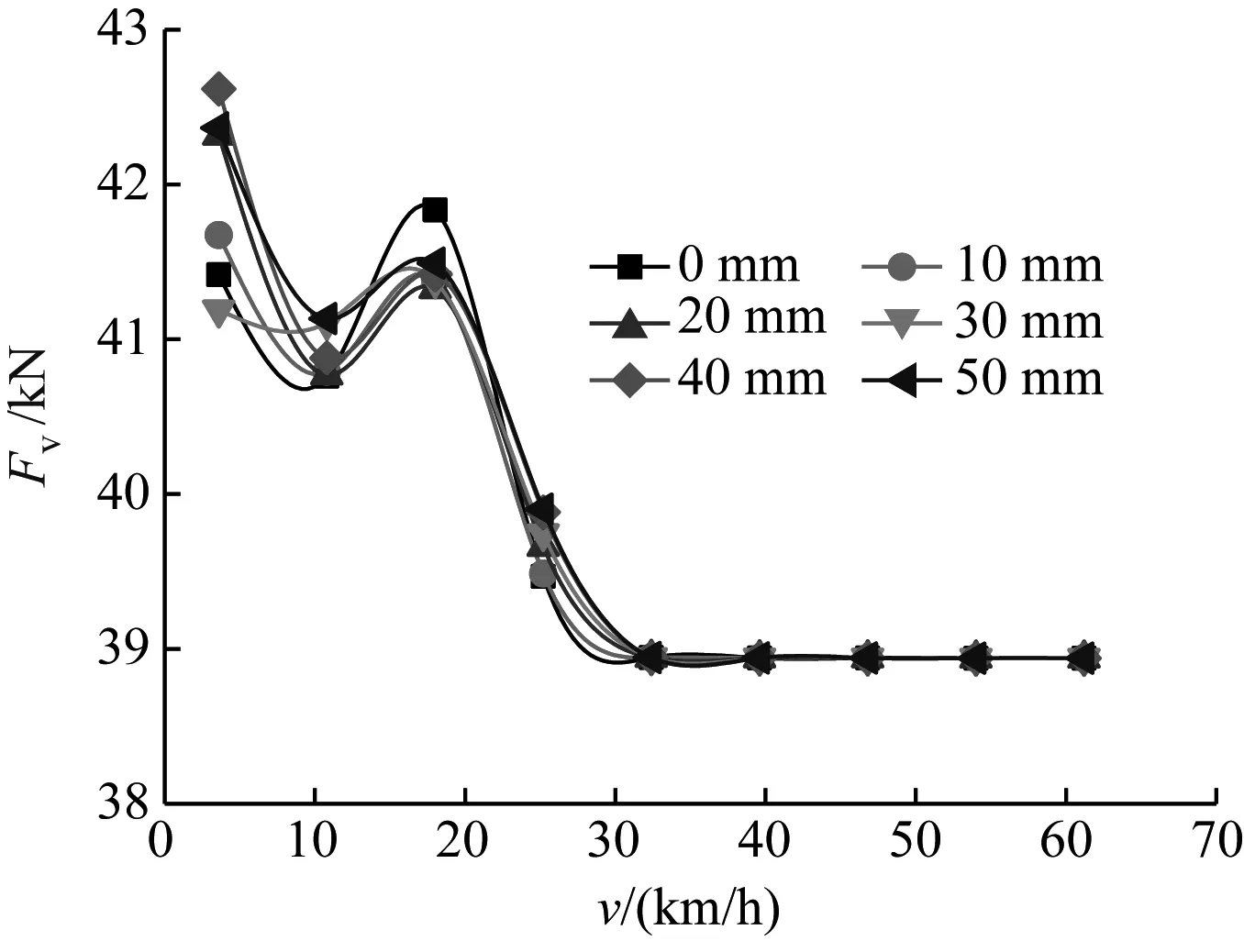
a) A1的Fv峰值
b) B1、B2的Fv峰值
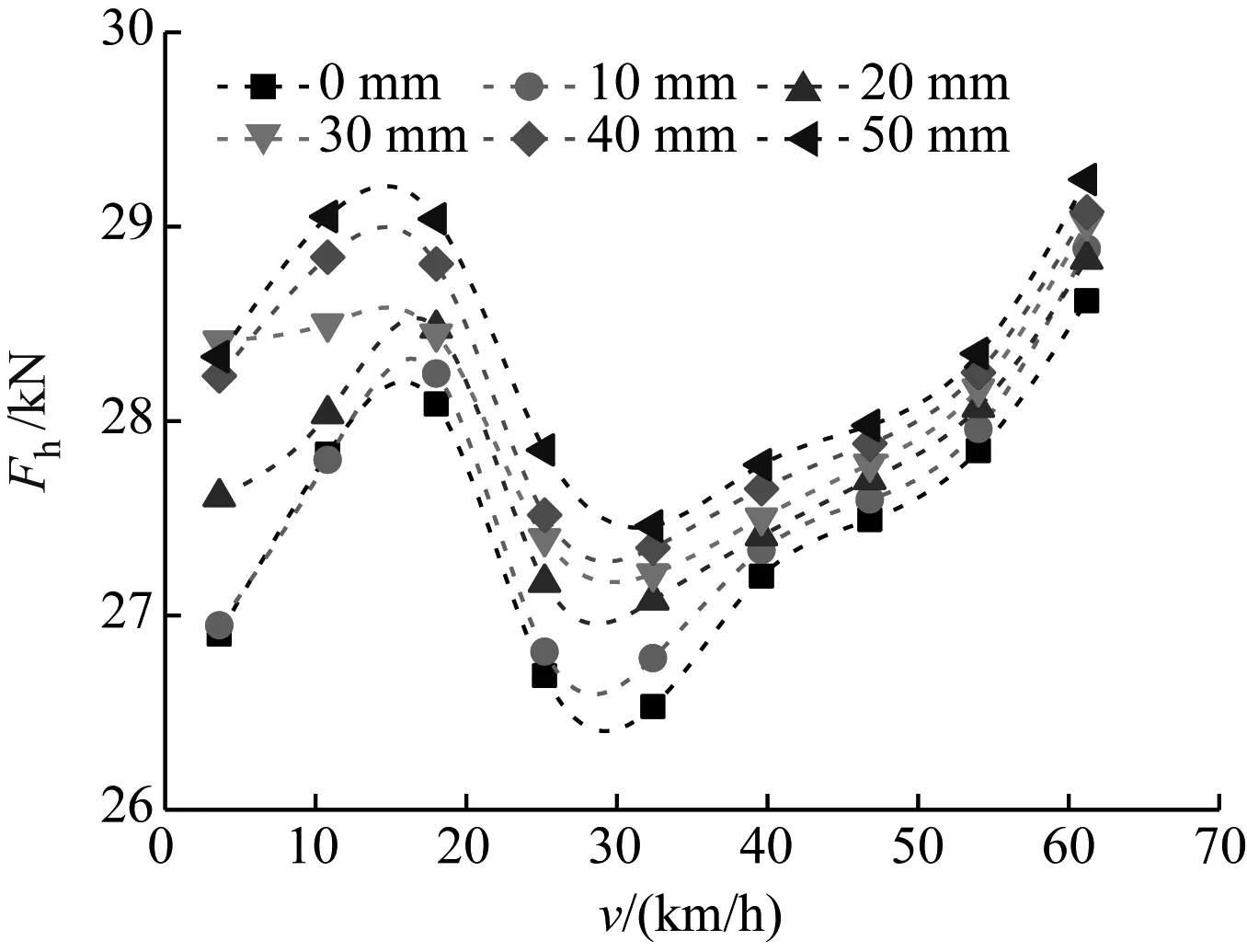
a) 外侧轮轨的Fh峰值
b) 内侧轮轨的Fh峰值
a) A1的Fh峰值
b) B1、B2的Fh峰值
1) 速度在0~10 km/h的范围内时,内侧车轮与轮背之间并未完全承载,内外侧轮轨主要为单点接触,因此轮轨内外侧垂向力大致上保持稳定,而内侧横向力增加较快。
2) 速度在10~15 km/h范围内时,轮对继续向外轨方向移动,内侧轮轨出现主要接触斑组合为A1、B1的两点接触,导致内侧轮轨的垂向力和横向力变化缓慢,而外侧轮轨的垂向力和横向力增加较快。
3) 速度在15~30 km/h范围内时,内侧轮轨出现主要接触斑组合为A1、B2的两点接触,内侧车轮轮背与护轨接触,并且其接触横向力随速度的增大而增大,导致外侧轮轨的横向力反而有所降低,并在速度为30 km/h时横向力达到最低值。
4) 速度超过30 km/h时,外侧轮轨在轨肩处接触。随着速度增大,整个车体有向外侧滚的趋势,导致外侧轮轨的横向力和垂向力快速增加,内侧车轮各个接触斑的横向力迅速减小。
2.2 安全性指标分析
本文采用的安全性指标限值[1]包括:脱轨系数为0.8;轮重减载率为0.6;轮轨横向力为0.4倍的轴重(10 t),即40 kN;垂向及横向平稳性指标限值均为2.5。
2.2.1 脱轨系数
本文研究发现,列车在各个工况下脱轨系数峰值情况如下:第1位轮对最大,第3位轮对次之,第5位轮对比第3位轮对小,其他非导向轮对更小。列车曲线通过速度为32.4 km/h、反超高量为20 mm时第1位轮对的脱轨系数随时间历程变化的曲线如图10所示。
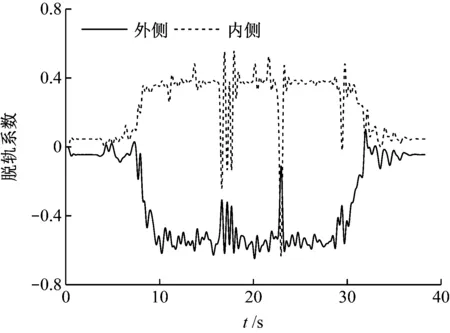
图10 第1位轮对的脱轨系数
不同工况下所对应的外侧车轮最大脱轨系数如图11所示。由上文轮轨横向力变化的趋势分析可知,反超高量对脱轨系数影响不明显,这与此时由内侧槽型轨护轨承受横向力有关。因此,在本文所研究的速度范围内,有轨电车外侧轮轨的脱轨系数均未超过限值(0.8)。
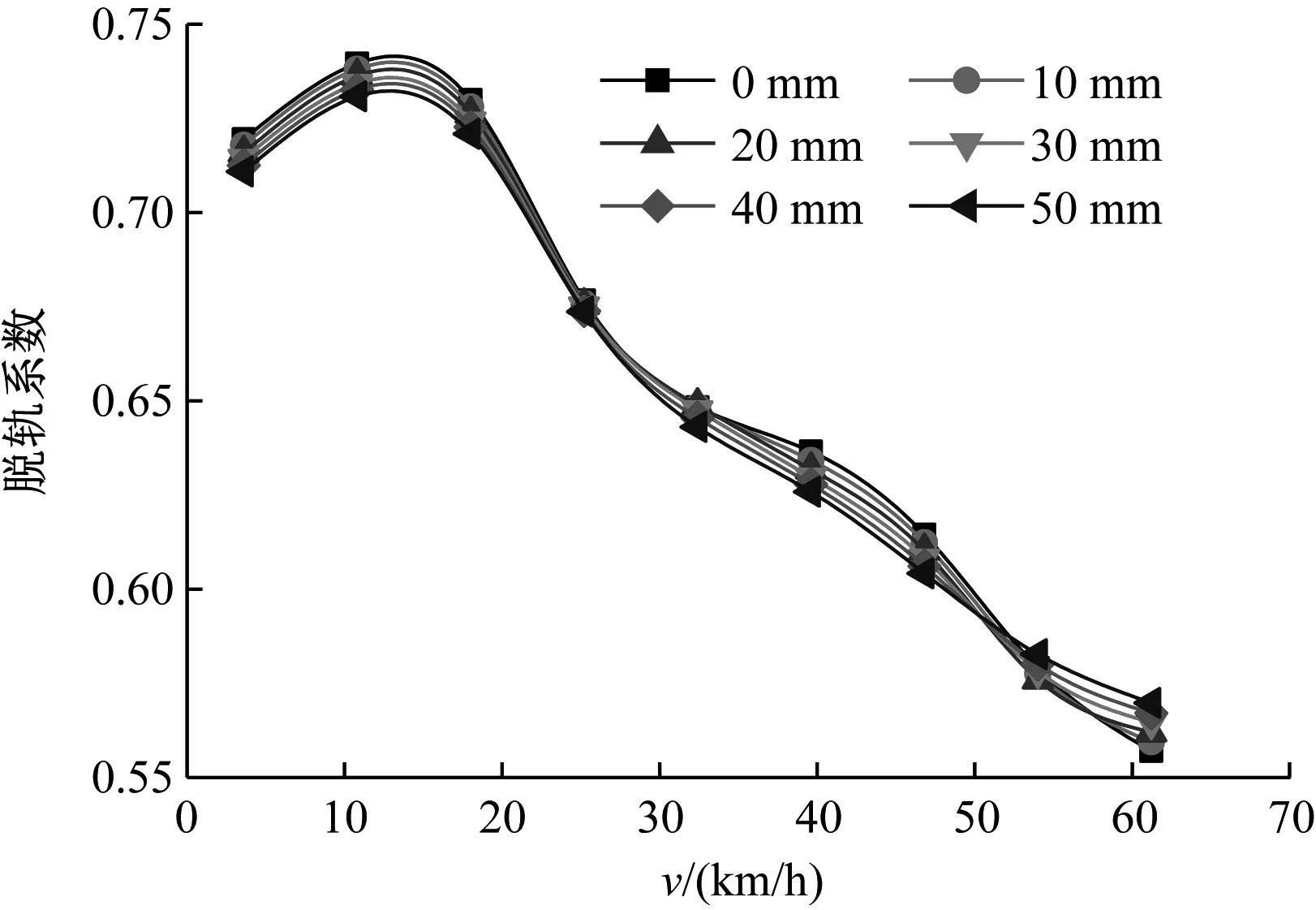
图11 各个工况下外侧轮对脱轨系数的最大值
2.2.2 轮重减载率
仿真计算结果表明,列车第1位轮对在各个工况下的轮重减载率峰值均为最大,其次是第5位轮对,再次是第6位轮对,即头车和尾车的轮对轮重减载率比较大,中间车的轮重减载率较小。列车曲线通过速度为32.4 km/h、反超高量为20 mm时第1位轮对轮重减载率随时间历程变化的曲线如图12所示。不同工况下的最大轮重减载率对比如图13所示。
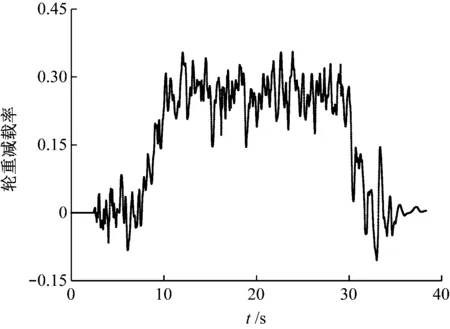
图12 第1位轮对的轮重减载率
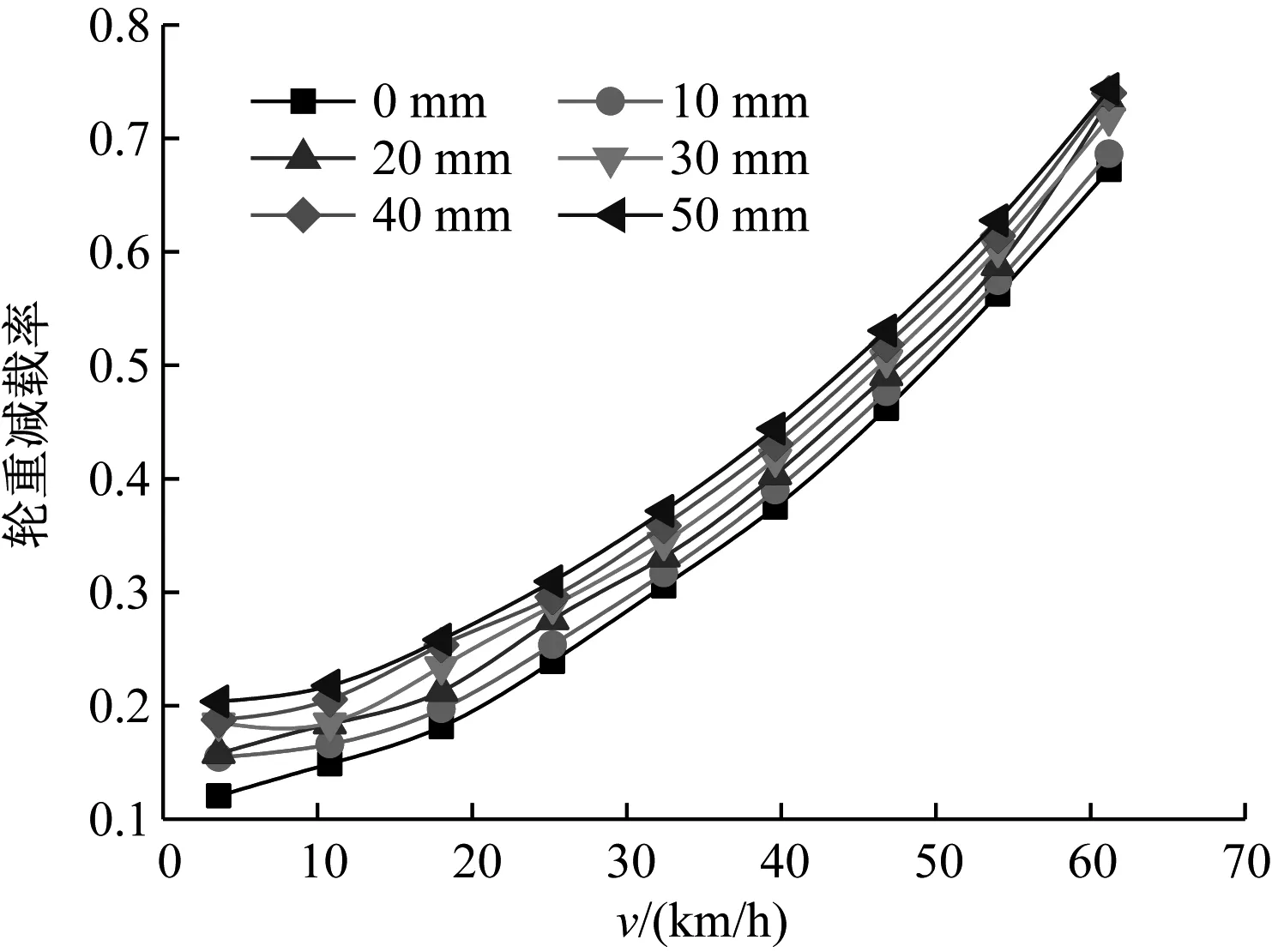
图13 各个工况下的轮重减载率最大值
从图12~13可以看出,轮重减载率不仅随着列车运行速度的增加而增加,而且还随着反超高量的增加而增加,呈现的规律为:列车运行速度在3.6~46.8 km/h范围内时,各反超高量工况下轮重减载率均未超过安全限值(0.6);列车运行速度达到54.0 km/h时,仅反超高量在0~20 mm范围内的轮重减载率未超过安全限值;列车运行速度提升至61.2 km/h时,各个反超高量工况下轮重减载率均超出安全限值。因此,在该半径曲线条件下,如出现最大20 mm的反超高,则列车最高运行速度不应超过54.0 km/h。
2.3 平稳性指标分析
在各个工况下对3个模块车体的平稳性指标进行对比后发现,头车的垂向和横向平稳性指标值最大,中间车次之,尾车最小。图14为头车在各个工况下的垂向和横向平稳性指标。由图14可以看出,在各个工况下头车的垂向和横向平稳性指标均未超过限值(2.5);各个工况下的横向平稳性指标值均略大于垂向平稳性指标值;随着列车运行速度的增加,垂向和横向平稳性指标值均逐渐变大;随着反超高量的增加,垂向和横向平稳性指标值变化并不明显。
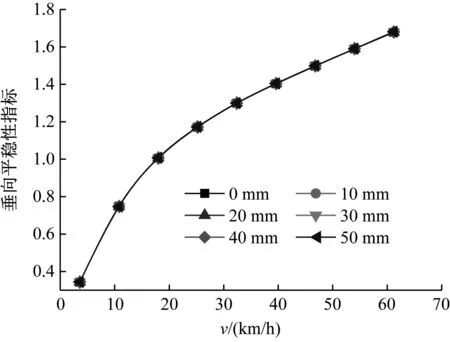
a) 垂向平稳性
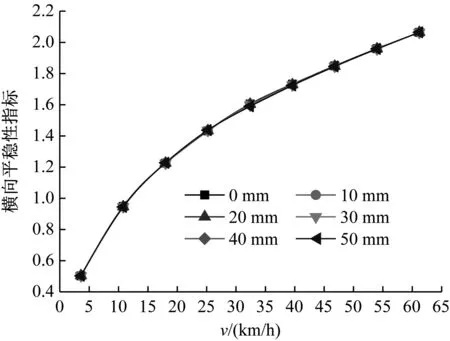
b) 横向平稳性
3 结语
本文以沈阳100%低地板有轨电车及其配套的槽形轨为研究对象,建立了列车-槽型轨动力学模型,并在此基础上完成了有轨电车反超高曲线通过动力性能研究,考查了不同的列车运行速度和不同的曲线反超高量工况下有轨电车系统的运行安全性和乘坐舒适性,以及轮轨接触特性等。研究结果表明,反超高量在0~50 mm范围内时,列车在小于46.8 km/h的速度范围内运行是安全、平稳的;反超高量在0~20 mm范围内时,列车在小于54.0 km/h的速度范围内运行是安全、平稳的。
鉴于轮轨之间约束关系,槽型轨轨道可以设置反超高曲线。如果工程中槽型轨轨道采用反超高,由于内侧轮轨容易发生多点接触,槽型轨的磨耗位置与采用正常超高线路有所不同,应加强对槽型轨轨头及护轨处的探伤检测及涂油保护,另外,必须严格控制列车的运行速度。