基于相参积累的地面MPRF-PD雷达二维联合解模糊算法
2021-07-21剡熠琛徐保庆雷张华苏小敏李雅梅
剡熠琛 徐保庆 雷张华 李 易 苏小敏 李雅梅
(西安电子工程研究所 西安 710100)
0 引言
脉冲多普勒(Pulse Doppler,PD)体制具有优良的杂波抑制性能,地面雷达进行低空探测受杂波影响很大,所以地面雷达广泛采用PD体制。理论上PD体制可以选用高脉冲重复频率(High Pulse Repetition Frequency,HPRF)和中脉冲重复频率(Middle Pulse Repetition Frequency,MPRF)。但是,对地面PD雷达而言,在HPRF下工作时,目标距离可能存在高度模糊,如此,强地物折叠杂波会给目标带来强遮蔽效应,影响目标检测性能[1]。因此,地面PD雷达通常选用MPRF工作。
然而,对于MPRF-PD雷达而言,雷达既存在距离模糊问题,又存在速度模糊问题,因此解模糊必不可少,为了准确结算出目标的真实距离和速度,雷达通常都会采用参差重频的工作方式。利用脉组参差,得到一组相关测量值,从而解算出目标的真实距离和速度。解模糊的传统方法有孙子定理法[2]、余差查表法[3]、一维集算法[4-5]等。上面几种方法其本质都是将雷达脉冲资源拆分为多个脉组,采用脉间变重频,选取两两互质的脉冲重复周期(Pulse Repetition Time,PRT),再对各个脉组分别进行目标信号检测,得到对应的目标视在距离(或速度),然后根据中国余数定理唯一地解出目标的真实距离。
传统解模糊方法存在一定的缺陷,即需要先对每个脉组进行目标信号检测[6-9],再进行模糊计算,其本质相当于二进制积累,因此信噪比会有一定的损失。对于小目标而言,有可能因为信噪比过低而检测不到,也就无法进行后续的解模糊。此外,传统双重解模糊通常是串行的,即先解距离模糊,再进行多普勒解模糊[1]。
针对上述问题,本文提出一种基于相参积累的地面MPRF-PD雷达二维联合解模糊算法。该方法的基本原理是先对滤波后的各个脉组信号在距离、多普勒二维进行拓展,然后进行脉组间的相参积累,最后再进行门限检测,通过门限检测结果就可以直接判别得到目标的真实距离单元和真实多普勒频率,从而计算得到目标的距离与速度,完成解模糊。该方法可以将雷达多个参差重频脉组的所有脉冲相参积累起来,提高了信噪比,从而提高小目标的检测概率以及解模糊的成功率,并且距离、速度解模糊可同时实现,该方法有效的前提条件是,各参差脉组的载频相同。
1 地面MPRF-PD雷达的模糊问题
1.1 距离模糊
MPRF-PD雷达工作在中重频下,当目标距离较远时,有可能雷达在发射下一个脉冲之前,前一个脉冲回波还未返回。在接收目标回波脉冲时,雷达会将接收到的脉冲回波判断为与之时间上最接近的前一个脉冲发射的回波,来计算时延差,进而估计目标距离。这种情况下求出的目标距离并非目标的真实距离,这种现象就是距离模糊。其具体示意图如图1所示。
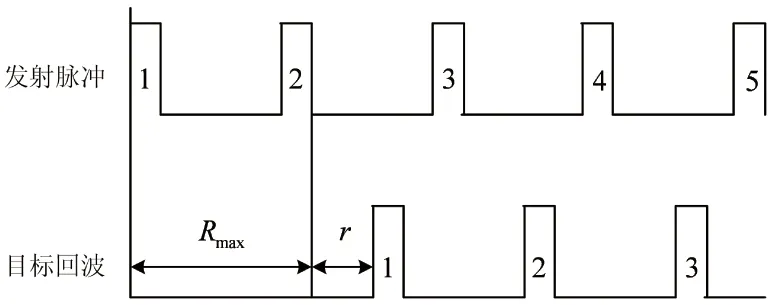
图1 距离模糊示意图
雷达的最大不模糊距离可以表示为
(1)
其中,c为光速,PRT为雷达脉冲重复周期。
假设r为雷达估计得到的目标视在距离,则目标的真实距离可以表示为
Rz=r+kRmax
(2)
其中,k为非负整数,表示距离模糊度。
1.2 速度模糊
雷达可以依据多普勒效应,通过提取目标的多普勒频率进而估计出运动目标的速度。目标多普勒频率与速度之间的关系式为
(3)
其中,v为目标运动速度,λ为雷达波长。雷达在测得多普勒频率后,可以根据计算得到目标速度。脉冲体制雷达,其脉冲重复频率即为采样频率,由Nyquist采样定理可知,当采样频率大于等于信号频率的两倍时才能完整地获取信号全部信息。所以可检测的目标多普勒频率与脉冲重复频率PRF存在如下关系
(4)
当式(4)满足时,速度与多普勒频率存在一一对应关系;当式(4)不满足时,测量得到的一个多普勒频率可能对应几种真实多普勒频率,这种现象叫做多普勒模糊。由于多普勒频率和速度是相互对应的,因此多普勒模糊又可称为速度模糊。
2 传统地面MPRF-PD雷达的解模糊方法
采用脉组参差的方法可以解决模糊问题,通常是采用顺序发射几组不同PRF交替工作的脉冲串,然后对不同PRF的脉冲串分别进行相参处理,检测得到各自重频下的目标视在距离、多普勒频率,然后再解算目标的真实距离、多普勒频率。其解算本质就是解同余方程组,以下是几种常用的解模糊方法。
2.1 孙子定理法
为了消除模糊,雷达系统成组地改变PRT,对每个脉组单独进行处理后到了一组相关测量值,测量值与真实值满足如式(5)关系。
Ri=R(modTi)
(5)
式(5)中,在解距离模糊时,Ri是第i组重频的视在距离,R是目标的真实距离,Ti是第i组重频对应的工作周期,它们的单位都是距离门单元。在解多普勒模糊时,Ri是第i组重频的视在多普勒频率,R是目标的真实多普勒频率,Ti是第i组脉组对应的PRF。式(5)中,i依次取1,2,…,n,得到一个同余方程组。根据孙子定理[2],在Ti两两互素的情况下,此方程组有唯一解。
孙子定理法能够准确解算的前提条件是不存在视在误差,当存在误差时,解算就会出错。
2.2 余差查表法
余差查表法是利用目标在各PRT上的余数(即视在距离、视在多普勒)之差进行解模糊。此方法的原理是,先在离线状态下,选择某一PRT为基准,假设目标模糊k次(k为非负整数),以目标其他各PRT上的余数与在该基准PRT上的余数进行相减,将所得之差作为查找项存入解模糊表中。
在实际解模糊时,将各重频下所得的目标的视在距离值(或视在多普勒)与基准重频下的目标视在距离值(或视在多普勒)进行相减,与余差表进行匹配,在满足一定测量误差的情况下,可以快速得到目标的真实距离和真实多普勒频率。
余差查表法的主要优点是在距离、多普勒测量范围不大时,能够通过查表快速匹配出目标的真实距离、真实多普勒频率。但是随着目标的距离和多普勒测量范围增大,余差表格的存储会占据很大空间,查找也会比较耗时。
2.3 一维集算法
一维集算法的实质是利用穷举法解同余方程组,计算时不需要对脉冲重复周期和视在测量值进行量化。其基本思路是对于每一个测量值Fi,列出它所对应真实值的全部可能值。
Fki=Fi+Fui,k=0,1,…,INT(Fmax/Fui)
(6)
式(6)中,Fi是第i个脉冲重复周期对应的视在距离或视在频率,Fui是第i重PRT对应的最大不模糊距离或最大不模糊频率,Fmax是雷达的最大作用距离或最大作用频率。由N(N是参差重频数)个模糊的测量值产生的全部可能值自小到大排队,并用式Foi表示。每N个频率值一组求均值和方差为
(7)
一维集算法可以解距离、多普勒模糊,且对测量误差没有很高的要求,但是由于涉及求均值和方差,所以在目标的模糊度较大时,计算量会大幅增加。
2.4 传统方法分析
上述解模糊算法的共同点在于:利用参差重频解模糊,将雷达脉冲资源拆分为多个参差脉组,对每个脉组分别进行相参积累,检测得到目标的视在距离、视在多普勒频率,然后再进行模糊解算。这些方法的本质均为二进制积累,信噪比会有一定的损失。对于小目标,可能会因为信噪比过低而造成目标漏检,也就无法在后续过程中进行解模糊。
3 基于相参积累的MPRF-PD雷达的二维联合解模糊方法
针对传统方法的缺陷,本文提出一种基于相参积累的MPRF-PD雷达的二维联合解模糊方法。该方法的基本原理是先对滤波后的各个脉组信号在距离维、多普勒维进行拓展,然后进行脉组间的相参积累,最后再进行门限检测,通过门限检测结果就可以直接判别得到目标真实距离单元、真实多普勒频率,据此计算目标距离和速度。
该方法可以通过相参积累将雷达多个参差重频脉组的所有脉冲积累起来,提高雷达的资源利用率,从而提高小目标的检测概率与解模糊成功率,并且可以同时完成距离、速度解模糊。
3.1 具体步骤
1)雷达接收参差重频下的回波信号,根据PRF的不同将回波分为N个数据矩阵,N为参差重频数;
2)对各重频下的回波信号分别进行距离-多普勒二维匹配滤波处理。脉冲压缩权系数为
h(t)=s*(t0-t)
(8)
其中,*表示取共轭,t0是延迟时间,s(t)表示雷达发射的调频信号。
为了抑制杂波,这里采用MTD滤波器进行多普勒滤波,根据维纳准则,MTD滤波器组的权系数为
wi=R-1·a(fi),i=1,2,…,G
(9)
其中,R为地杂波协方差矩阵
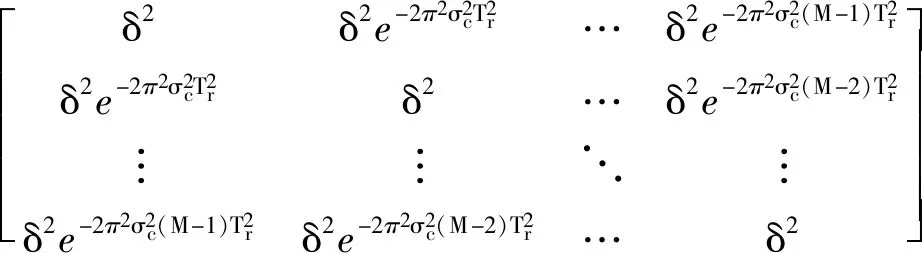
(10)

(11)
其中,i为滤波器编号,G为滤波器组中的滤波器个数,这里需要将多普勒滤波器组中的滤波器个数进行加倍,目的在于提高步骤4)③中多普勒通道查找的准确性,进而提升脉组间的相参积累效果;
3)将距离-多普勒二维滤波结果分别在距离维、多普勒维同时进行周期延拓;
4)对周期延拓后的数据矩阵Zn(n=1,2,…,N)进行脉组间相参积累,得到相参积累后的数据矩阵Z’:
①确定第n组多普勒滤波器组中的第k个滤波器的中心频率fn,k,其中,n=1,2,…,N,k=1,2,…,G,G表示加倍后多普勒滤波器组中的滤波器个数;
②根据fn,k来确定数据矩阵Zn的每一行分别对应的中心频率;
③以矩阵ZN为基准,对于其每一个多普勒通道,如果其对应的多普勒频率未出现在矩阵Zn′(n′=1,2,…,N-1)的多普勒盲区内,就在矩阵Zn′(n′=1,2,…,N-1)中找出与其中心频率最接近的多普勒通道,然后对所有中心频率最接近的多普勒通道进行相位调整后,将其积累起来,得到相参积累后的数据矩阵Z′;
5)对相参积累后的数据矩阵进行检波、恒虚警检测,得到过门限的点迹;
6)对过门限点迹进行判别,得到目标的真实距离、真实多普勒频率;
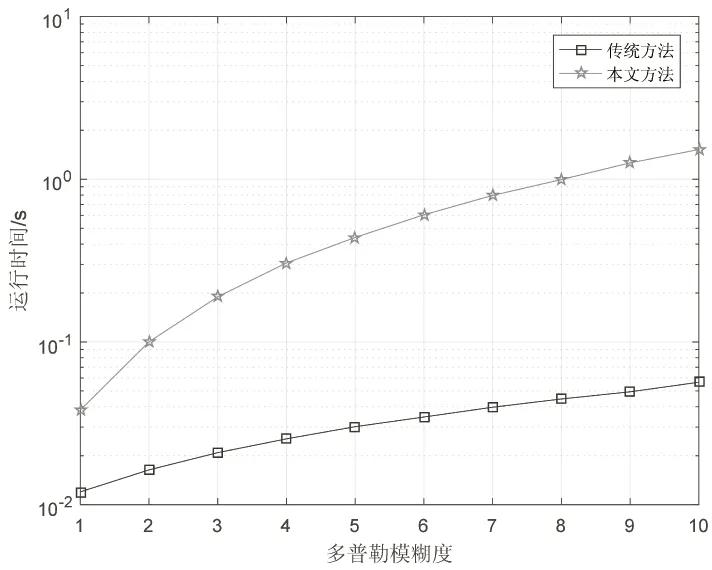
①将第m个过门限点迹的距离单元记为rm,多普勒通道记为dN,m,同时确定该点迹的多普勒通道对应的中心频率,记为fm;这里0 ②在矩阵Zn′(n′=1,2,…,N-1)中确定多普勒盲区不包含频点fm的矩阵,记为Zh(h=1,2,…,H),H表示矩阵Zn′(n′=1,2,…,N-1)的多普勒盲区中不包含频点fm的矩阵个数; ③在矩阵Zh(h=1,2,…,H)中分别找到中心频率最接近fm的多普勒通道,记为dh,m; ④确定矩阵ZN的第rm个距离单元、第dN,m个多普勒通道对应的元素,记为ZN,m,同时,分别确定矩阵Zh(h=1,2,…,H)第rm个距离单元、第dh,m个多普勒通道对应的元素,记为Zh,m; ⑤如果ZN,m与Zh,m(h=1,2,…,H)幅度相当,则说明rm就是目标的真实距离单元,将其记为rt,fm就是目标的真实多普勒频率,将其记为dt,反之,说明是虚警; 7)根据判别得到的目标距离单元计算目标真实距离为 (12) 根据目标真实多普勒频率计算得到目标的真实速度为 (13) 其中,fs表示采样频率,λ表示雷达波长。至此,完成雷达解模糊。 需要特别说明的是: 1)在步骤4)③中,参差脉组进行相参积累时,不同脉组的目标多普勒通道不同,在积累时需要以一个脉组为基准,所有脉组中相同多普勒频率对应的多普勒通道进行调相相加。此外,为抑制杂波,多普勒滤波器在零频有凹口,查找多普勒通道时需要考虑多普勒盲区的问题。 2)在步骤6)⑤中,需要进行点迹判别的原因是目标较大时,单个脉组也可过门限,此时会存在很多虚警,本步骤中对点迹进行判别,其目的在于保证虚警率的恒定。 由3.1节可知,本方法需要进行距离和多普勒的二维扩展,同时还需要对恒虚警过门限的点迹进行判别,得到目标真实距离与速度,同时抑制虚警。因此,该方法的计算量会增加,下面对运算量进行具体分析。 假设单目标模糊,距离模糊度为m,多普勒模糊度为n,两脉组参差解模糊,经脉冲压缩、多普勒滤波处理后,脉组一距离多普勒矩阵为k×l1维,脉组二距离多普勒矩阵为k×l2维,l=min(l1,l2)。 传统解模糊方法先对两个脉组分别进行CFAR检测,然后再进行模糊解算。在进行CFAR时,假设参考单元数目为p,两个脉组共需要约2(k×l×p)次复数加法,距离和多普勒需要分别进行解模糊,模糊解算运算量与模糊度有关,以余差查表法为例,距离模糊度为m,多普勒模糊度为n,则需要查找2(m+n)次。 文中方法先对两个脉组进行相参积累,然后进行CFAR检测,最后需要进行点迹判别来抑制虚警。在进行相参积累时,要进行nl次多普勒通道的查找,以及(mk×nl)次复数乘法,(mk×nl)次复数加法,进行CFAR检测时,需要约(mk×nl×p)次复数加法,在点迹判别抑制虚警时需要进行2×(m×n-1)+1次查找判别。 由上述分析可见,文中方法的运算量远大于传统方法,模糊度越高,运算量越大。 为验证文中方法的有效性,做如下仿真实验。 仿真参数:雷达波长λ=0.5 m,发射的LFM信号时宽T=100 μs,带宽B=2 MHz,采样率fs=B,两参差重频,PRT1=726 μs,PRT2=689 μs,一个脉组中的脉冲个数M=32,假设目标真实距离为R=300 km,目标速度为v=398 m/s,单脉冲信噪比为SNR=-20 dB。 仿真内容:利用本文方法对目标信号进行检测,脉组一的目标检测结果如图2所示,脉组二的目标检测结果如图3所示,对脉组一和脉组二进行相参积累的结果如图4所示,文中方法与传统方法的目标距离像对比图如图5所示,局部放大图如图6所示,目标多普勒像对比图如图7所示,局部放大图如图8所示。 图2 单脉组检测结果(PRT1=726 μs) 图3 单脉组检测结果(PRT2=689 μs) 图4 相参积累二维联合解模糊结果 图5 距离像对比图 图7 多普勒像对比图 图8 多普勒像对比局部放大图 由图4结果可见,目标真实距离单元为4000,真实多普勒频率为1525 Hz,经过计算得到目标的距离300 km,目标速度为381.25 m/s。由图6、图8可见,在两参差重频下,文中方法较传统方法而言,可以将目标的幅度提高大约2倍,将新方法的目标距离像幅度记为Sn,将传统方法的目标距离像幅度记为So,则有Sn/So≈2,记新方法得到的目标信噪比为SNRn=Sn/Nn,记传统方法得到目标信噪比为SNRo=So/No,则有 =20lg(2)-10lg(2) =3dB (14) 幅度提高两倍,说明信号功率提升6dB,两个脉组相参积累噪声功率会提升3dB,因此信噪比提升3dB,所以提高检测概率,对于信噪比较小的目标信号也可以完成解模糊。 下面对传统解模糊方法与本文解模糊方法的运行时间进行统计,图9为运行时间随距离模糊度变化的对比图,图10为运行时间随速度模糊度变化的对比图。 由图9、图10可见,本文方法的运算量大于传统方法,模糊度越大,运算量增大越明显,其中速度模糊度对运算量的影响更大,原因是算法中多普勒查找以及相参积累的运算量与速度模糊度密切相关。 图9 运算时间随距离模糊度变化对比图 图10 运算时间随速度模糊度变化对比图 本文首先对地面MPRF-PD雷达的距离、速度模糊现象进行了详细说明,并对传统的雷达解模糊方法进行了分析,传统方法没有充分有效利用雷达脉冲资源,存在信噪比损失,不利于小目标的解模糊检测。针对传统方法的缺陷,本文提出了一种基于相参积累的MPRF-PD雷达二维联合解模糊方法,在脉组载频不变,速度模糊度较低的情况下,采用本文算法可以有效提高信噪比,有利于小目标的解模糊检测,可同时实现距离、速度的模糊解算。3.2 运算量分析
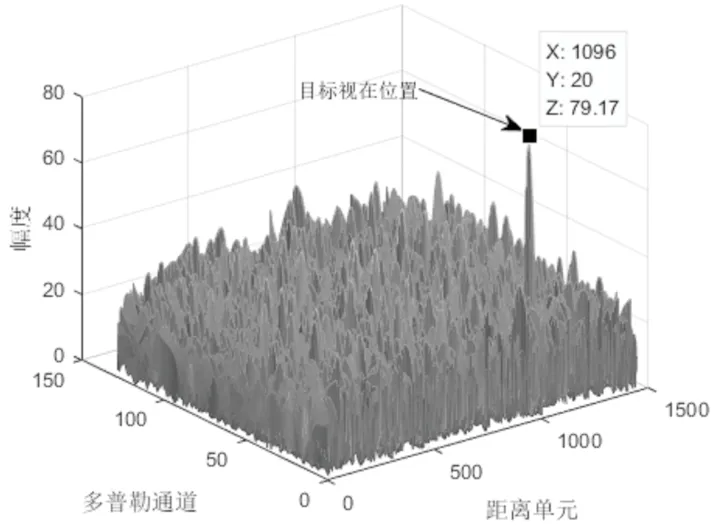
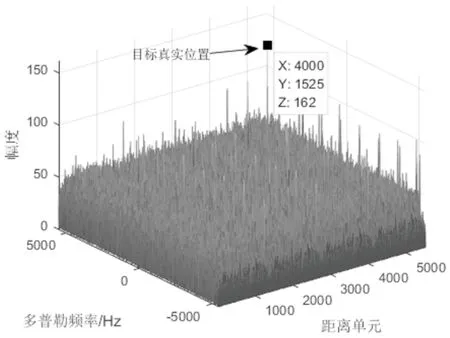
3.3 仿真分析

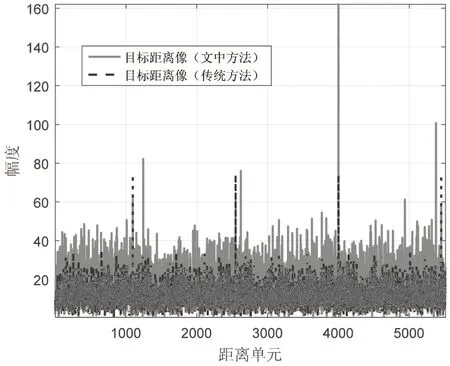
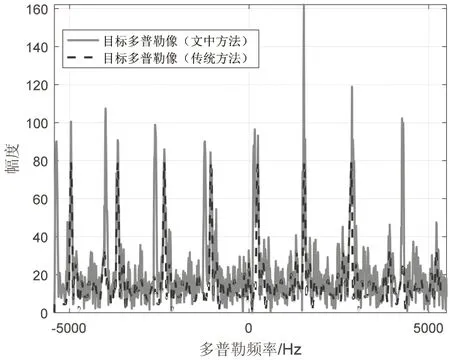
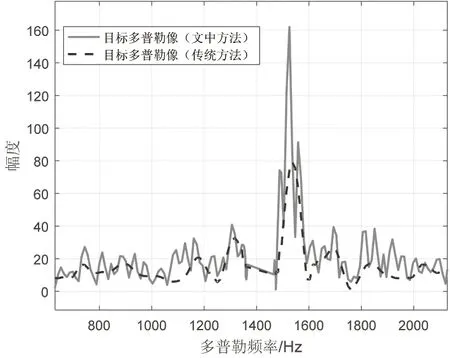
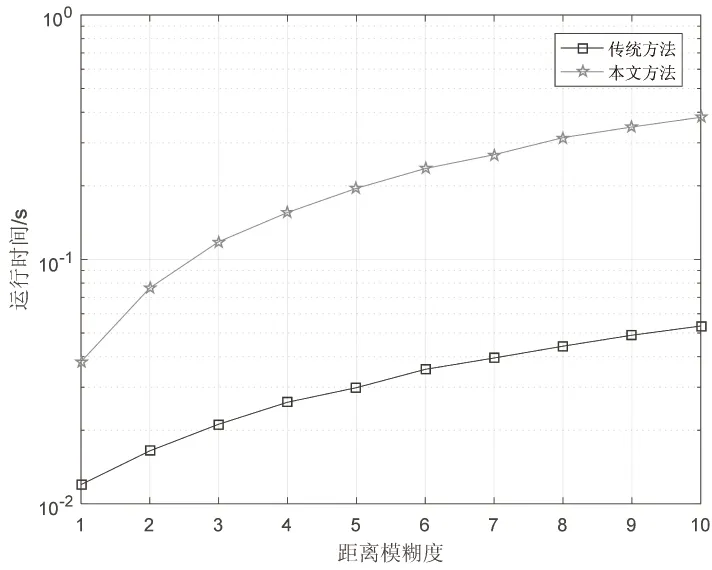
4 结束语
