一种复杂杂波背景下的DP-TBD算法
2021-07-21吕腾蛟袁子乔任泽宇
吕腾蛟 袁子乔 雷 刚 任泽宇
(西安电子工程研究所 西安 710100)
0 引言
检测前跟踪是一种针对弱目标的检测和跟踪技术。相比于传统跟踪方法,TBD技术不对单帧雷达回波数据做目标检测,而是通过对多帧回波数据进行信息积累进而实现目标的检测与航迹跟踪[1-2]。TBD技术对单帧数据不采用过门限检测避免了传统跟踪前检测技术目标信息丢失问题,其实质是通过长时间积累换取目标信噪比的提高[3]。对于TBD技术的实现主要包含:基于动态规划的TBD算法(DP-TBD)、基于霍夫变换的TBD算法(HF-TBD)、基于粒子滤波的TBD算法(PF-TBD)、基于随机有限集的TBD算法(RFS-TBD)等。在TBD技术多种实现方法中,DP-TBD算法因有适用性广,易于实现等特点,成为国内外学者研究的重点。
传统DP-TBD算法虽然能对弱目标进行有效检测,但当背景杂波为强杂波时,此时过门限目标点的航迹为虚假航迹的概率迅速增加。针对弱机动目标在强杂波背景下虚假航迹增加的问题,本文主要从两方面讨论:第1节主要对DP-TBD算法基本流程进行介绍并进行仿真分析;第2节主要介绍了一种基于方向信息辅助DP-TBD算法,通过仿真分析验证了该算法能有效剔除强杂波导致的虚假航迹。
1 DP-TBD算法
1.1 量测模型
一个N×N观测矩阵可表示为
z(k)={zxy(k)}
(1)
其中,1≤x,y≤N,zxy(k)记录第k帧位于分辨单元(x,y)的观测数据。
(2)
其中,(a)表示第k帧位于分辨单元(x,y)的观测数据没有目标信息,只包含噪声信息;(b)表示第k帧位于分辨单元(x,y)的观测数据除了噪声信息还包含目标的幅值信息。
1.2 运动模型
若目标在二维平面运动,则可用速度、位置信息对其运动状态进行描述为

x(k+1)=Fx(k)
(4)
其中,F为目标状态转移矩阵。

(5)
1.3 DP-TBD算法
DP-TBD算法实质是利用K帧观测数据{z(1),…,z(K)}对目标可能经历航迹进行搜索,并从过门限状态序列中选取与真实航迹最接近的状态序列[5]。
1)初始化:起始时刻目标可能位于状态空间任意位置。
I(X1)=zxy
(6)
ΨX(1)=0
其中,I(Xk)为累计观测量,代表某条航迹所有观测值的非相干积累。ΨX(k)记录航迹搜索过程中第k帧的状态从第k-1帧的哪一个状态转移而来。
2)非相干积累阶段:
(7)
对于状态Xk在第k-1帧所对应的q个状态中,累计观测量I(Xk-1)最大的状态即是最有可能转移到第k帧的状态。
3)判决阶段:对X(K)进行门限检测
(8)
若大于检测门限则判定目标存在,否则判定目标不存在。
4)航迹回溯阶段:对通过检测门限的目标利用ΨX(k)函数得到其在每一帧位置信息,并从多条过门限航迹中选取一条最佳航迹作为对真实目标航迹的估计。
2 基于方向信息辅助的 DP-TBD算法
强杂波背景下利用DP-TBD算法进行检测,因待检测目标信杂比较低的缘故,算法多帧积累之后,在门限检测阶段可能会产生大量虚假航迹。对于待检测的弱机动目标,其在短时间内运动方向不会发生巨大变化,而由强杂波所引起的虚假航迹其航迹方向则是随机变化的[6-7]。
根据真实目标短时间内运动方向近似直线,虚假目标运动方向随机变化特点,可利用航迹上连续三帧计算航迹偏离角并进行统计,进而剔除强杂波所引起虚假航迹。
图1为通过检测门限的回溯航迹。若目标在二维平面运动,其航迹在第k帧的坐标用(xk,yk)表示,则目标在第k+1帧与第k帧航向如式(8)所示。

图1 回溯航迹

(8)
目标在第k帧与第k-1帧航向为
(9)
则航迹偏离角可定义为
φk-1,k,k+1=θk,k+1-θk-1,k
(10)
根据弱机动目标运动特点,其航迹偏离角φk-1,k,k+1应该在0°附近变化,若对K帧观测数据进行非相干积累,则可对通过检测门限目标点的K-1个航迹偏离角统计,当位于0°附近的偏离角个数少于所设定门限时则判定为虚假航迹。
综上所述,基于方向信息DP-TBD算法具体实现步骤为:
1)利用传统DP-TBD算法对K帧观测数据进行非相干积累。
2)对过门限目标点进行航迹回溯得到其在每一帧位置信息,利用坐标点获得目标点的K-1个偏离角。
3)对在0°附近的航迹偏离角进行统计,将统计值与设定门限进行对比,若数量少于门限则判定为虚假航迹。
3 仿真分析
3.1 常规DP-TBD算法
图2、图3、图4是在仿真条件,分辨单元为(50×50),背景噪声服从标准正态分布,目标初始位置为(15.2,27.2),初始速度为(1,1),信噪比为8dB,积累帧数为12帧下所得仿真结果。

图2 单帧积累值

图3 6帧积累值
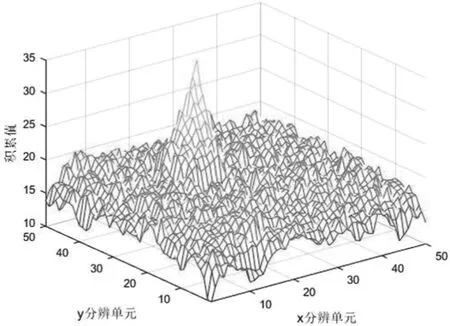
图4 12帧积累值
从图2可以看出,对于单帧观测数据由于目标信噪比较低缘故无法对目标进行有效的检测,而从图2与图3可以看出随着积累帧数的增加,在目标点附近会形成一个棱锥形突起,且积累帧数越大,棱锥形突起越明显,可对空间目标进行有效的检测并可通过航迹回溯实现跟踪。
3.2 基于方向信息DP-TBD算法
图5、图6是在仿真条件,分辨单元为(50×50),背景噪声服从标准正态分布,目标的初始位置为(15.2,27.2),初始速度为(1,1),信噪比为5dB,积累帧数为12帧下所得仿真结果。

图5 基于方向信息辅助处理前航迹图

图6 基于方向信息辅助处理后航迹图
对DP-TBD处理之后的累计观测量采用局部取极大值提取目标点。从图5可以看出,在对12帧观测数据非相干积累之后获得多条过检测门限航迹,除了与真实航迹最接近的最优航迹外,同时包含多条虚假航迹。图6为利用过门限目标点航迹信息,统计航迹航向偏离角在0°附近数量并与所设定门限对比,若少于门限值则判定为虚假目标。对比图5、图6可以看出,基于方向信息的DP-TBD算法可以有效剔除强杂波背景下的虚假航迹。
4 结束语
针对强杂波背景下常规DP-TBD算法虚假航迹增加的问题,首先简要介绍DP-TBD算法基本原理,同时根据弱机动目标短时间内航迹方向变化不大特点,通过对目标点0°附近的航迹偏离角进行统计并与所设门限对比,若低于所设门限则判定为虚假航迹。仿真结果显示,相比于传统算法基于方向信息DP-TBD算法能有效剔除虚假航迹。
