浅析电子稳定控制系统(ESC)的标定开发流程
2021-07-21吴德森邓帅韦振举
吴德森、邓帅、韦振举
(1.上汽通用五菱汽车股份有限公司,柳州 545000;2.湖南湖大艾盛汽车技术开发有限公司柳州分公司,柳州 545000)
0 引言
电子稳定控制系统(ESC)是在防抱死制动系统(ABS)和牵引力控制系统(TCS)基础上的继承与扩展。自第一代电子稳定控制系统于20 世纪90年代实现工业化量产后,以博世为代表的汽车科技公司通过对其控制逻辑和算法的优化,不断迭代开发,使ESC(或叫ESP)成为目前最重要的主动安全配置之一。
ESC 主要由电子控制单元(ECU)、液压控制模块(HCU)、车轮轮速传感器、惯性传感器(IMU)和方向盘转角传感器等组成。ESC 通过与发动机管理系统(EMS)、变速器控制单元(TCU)及车身控制单元(BCM)等控制单元之间的交互获取相关的车辆信息,结合标定匹配建立的车辆模型和控制参数,估算并实时监控车辆的行驶状态。在车轮打滑或车辆失稳时,ESC 通过对车辆实施制动、发动机扭矩干预,使车辆始终保持稳定可控的状态。基于整车的ESC 标定匹配对最终性能起到决定性的作用。
1 ESC 标定流程
ESC 标定匹配是指通过外部设备测量分析车辆性能数据,建立车辆模型,持续优化修改ECU 控制参数,使ESC 性能符合法规要求以及整车厂商原厂配套(OEM)规范的过程。ESC 与项目车型的配置参数息息相关,因此在项目开发过程中,需要针对不同车型配置进行标定匹配。
ESC 需要进行“两高一低”的标定匹配,其中高附主要在干沥青路面进行,低附主要在冬季的抛光冰面、雪面进行。3 个阶段的标定匹配共历时16 个月。
第一阶段高附标定匹配需要改制车辆、调试软件,建立压力模型、扭矩模型和高附车辆动力学模型,以及各功能高附参数初调。第二阶段冬季低附标定匹配的主要工作,是建立低附车辆动力学模型和各功能低附参数标定。第三阶段高附标定匹配主要是对ESC 的性能进行精调,对车辆ESC 性能进行法规、OEM 的测试验证,并由OEM 进行主观评价验收。
2 车辆改制
2.1 ESC 模块及压力传感器改制
标定匹配过程需要使用专用的标定设备修改ECU 参数,通过外置轮缸压力传感器检验压力估算是否准确。因此需要把ESC改制为支持CCP/XCP 标定协议的可修改参数的模块[1],并分别在4 个车轮的制动管路中安装压力传感器及相应的电源、数据线束。
2.2 防滚架改制
ESC 的标定匹配属于高风险测试,车辆随时有出现失控甚至侧翻的风险。为保证标定匹配工程师的安全,在开始标定匹配前,对重心较高或者悬架较软的SUV 或MPV 车型,需要对车辆进行防滚架安装。
2.3 测试仪器设备安装
安装设备支架、轮缸压力采集设备、ESC 标定设备、VBox设备、IMU 惯导传感器和OxTS 2502 惯性导航系统。
3 车辆磨合
标定匹配启动前,车辆需按照下列方法进行磨合:车辆满载,以最高车速的80%(≤120 km/h)作为初始速度,以2~3 m/s²减速度开始制动。当速度减至初始速度的50%时,松开制动踏板,将车速加速至初始速度,重复试验[2]。磨合总次数为200 次或200 km,如因条件限制无法完成200 次磨合时,可适当调整磨合次数。
4 基础模型测试
4.1 转向传动比测量
转向传动比是建立车辆动力学模型的重要参数,它确定方向盘转角与车轮转角的函数关系。通常由OEM 给出设计传动比值,或使用带转角传感器的设备测量方向盘转角与车轮转角信号,根据测量信号数据计算获取。
4.2 惯性传感器校准
惯性传感器,也称为惯性测量单元(IMU),ESC 的IMU 单元主要分为两类,即独立式和集成式。集成式指把IMU 集成在ESC 内,是目前的发展趋势。不管独立式还是集成的IMU,在确定安装位置后,均需对其相对于整车质心的位置进行修正,同时对传感器输出信号进行校准。校准时以外接设备(例如CrossBow IMU)作为参考,根据车辆特性对车辆侧倾、侧向加速度进行补偿校准。
4.3 压力容积曲线测量
压力容积曲线(PV,Pressure Volume Curve)表征制动器轮缸压力与主缸制动液流量的关系(图1)。PV 直接影响ESC 对轮缸压力的估算,进而影响ESC 性能。PV 可以通过耗液量设备测量、制动系统参数拟合以及踏板行程与压力传感器换算这3 种方式获得。
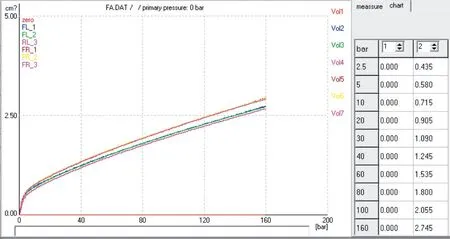
图1 PV 压力容积曲线
4.4 车辆动力学模型建立
车辆动力学模型是估算车辆参考横摆角速度、侧向加速度和质心侧偏角的主要理论基础(图2和图3)。通过对比车辆模型与车辆实际行驶状态之间的偏差,判断ESC 的干预时机和干预强度。车辆动力学模型的建立需要在转向瞬态响应试验(转向盘转角阶跃输入)、转向瞬态响应试验(转向盘转角脉冲输入)、稳态回转试验以及蛇形试验等过程中,校准横摆角速度的估算[3]。
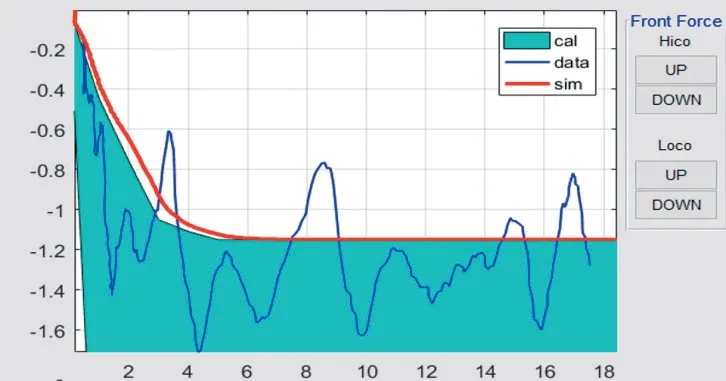
图2 轮胎侧偏特性
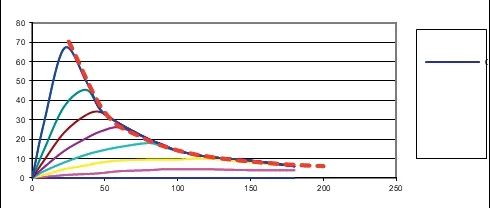
图3 车辆稳态横摆角速度与车速的关系
5 ESC 功能标定匹配
5.1 ABS 标定匹配
ABS 标定主要分为高附、低附和法规验证测试3 大类型。在标定匹配过程中,以正常驾驶员紧急制动、缓慢制动至进入ABS两种制动形式,对ABS 进入和退出时机、滑移率控制、压力控制、制动距离和制动稳定性等方面进行优化,使车辆的制动效能、制动稳定性及制动NVH 性能能够满足OEM 规范和法规要求[4]。ABS 标定匹配测试工况如表1所示。
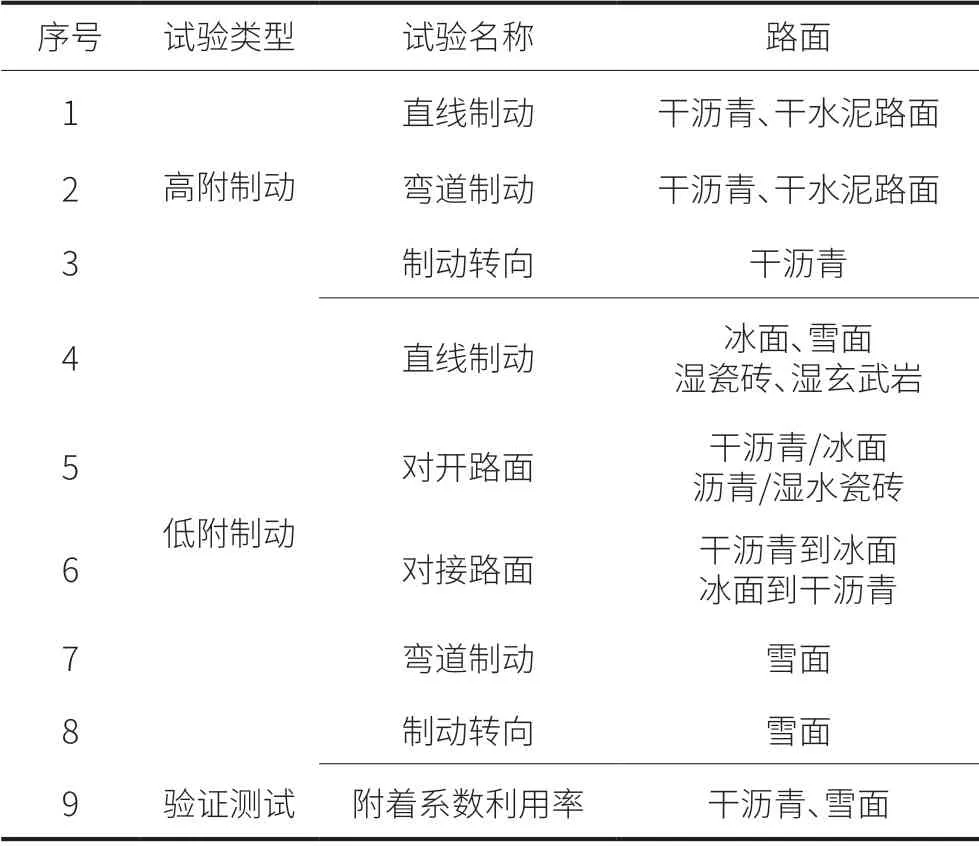
表1 ABS 标定匹配测试工况
5.2 TCS 标定匹配
TCS 标定匹配主要分为高附和低附两类试验,绝大部分标定工作集中在冬季低附。TCS 标定匹配对发动机管理系统EMS 和变速箱控制单元TCU 的开发成熟度依赖较高。TCS 标定匹配过程中,通过模拟驾驶员全油门、半油门、轻油门起步和加速的情况,对TCS 牵引力控制系统的进入和退出时机、车轮滑转率控制、制动与扭矩控制的协调性进行参数优化,使车辆的加速性能、加速稳定性、加速平顺性满足OEM 规范。测试工况如表2所示。
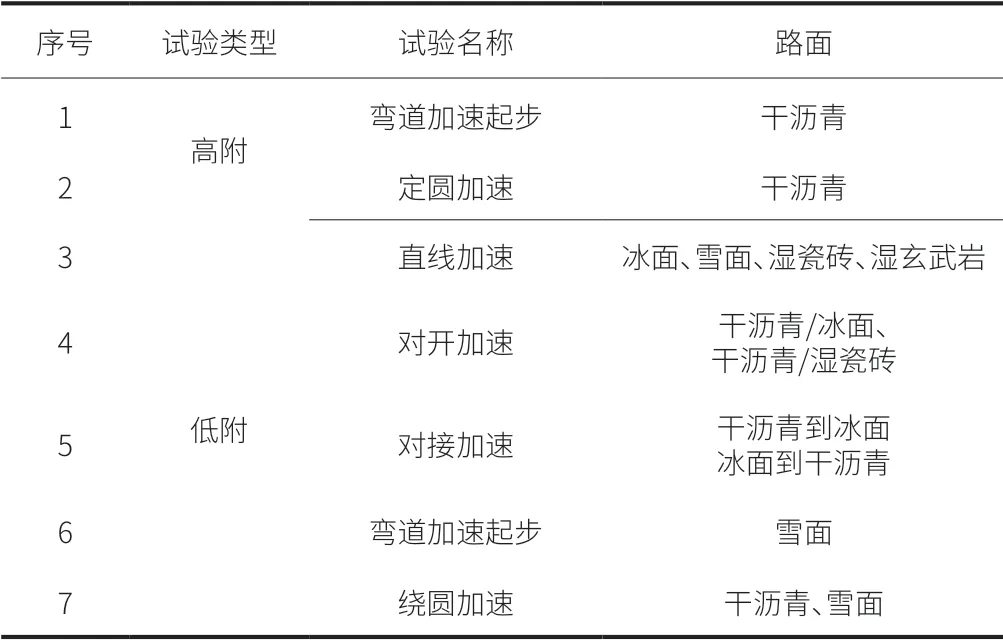
表2 TCS 标定匹配测试工况
5.3 主动横摆控制(AYC)标定匹配
AYC 标定匹配主要分为高附和低附2 类试验,车辆动力学模型是AYC 标定匹配基础。完成车辆模型测试后,通过如表3所示的测试工况对AYC 的干预时机和干预强度进行参数优化,使车辆性能符合OEM 规范及验收驾驶员主观评价要求[5]。
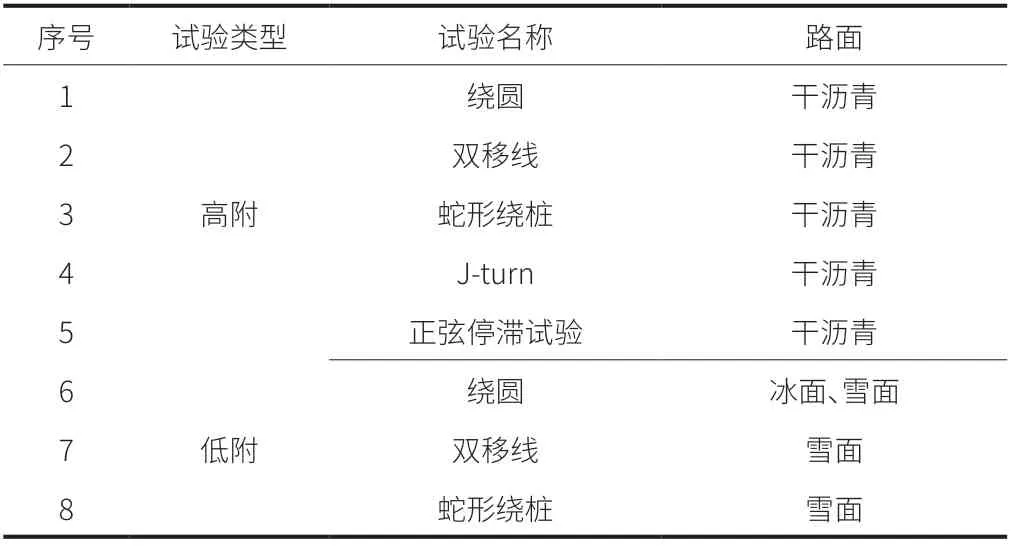
表3 AYC 标定匹配测试工况
6 总结
标定匹配是ESC 开发的重要环节,很大程度上决定了车辆的ESC 性能。本文介绍的ESC 标定匹配开发流程,仍需在后续项目开发中不断完善流程管控,优化标定匹配效率。