基于模糊系数修正BP神经网络PID的BLDCM控制系统仿真研究*
2021-07-20王文奎
彭 斌, 王文奎
(兰州理工大学 机电工程学院,甘肃 兰州 730050)
0 引 言
随着工业化、智能化应用技术的推广,具有固定模式的滑行灯已无法满足飞机驾驶员在夜间转弯滑行时的视线要求,从安全性和舒适性的角度考虑,提出一种按照机身状态实时改变滑行灯转角的位置随动转向系统,该系统采用无刷直流电机(BLDCM)为执行器。
BLDCM综合了直流电机和交流电机的优点,具有体积小、质量轻、结构简单、输出转矩大、可靠性高、能耗小等优点,最主要在于其电子换向技术具有更好的可调控性。但BLDCM又因相对复杂的控制系统而具有多变量、非线性、强耦合的固有特征[1]。
PID控制凭借其简单的结构、较强的鲁棒性在工业控制领域具有非常广泛的的应用[2],其被控对象一般具有特定的数学模型或相对简单的结构,固定的系数使其在较复杂的非线性控制系统或应对干扰信号时很难实现信号的跟随。
BLDCM区别于交流电机的主要特征是通过位置传感器或无位置感应法时刻检测转子的位置,将信号传送至驱动器进而控制逆变器的功率开关工作状态,从而控制电机的转速。也可以对逆变器关断角进行调节、采用直接转矩控制和其他智能控制算法。在实际应用中通常采用简单且适应性较强的PID控制或附加模糊算法优化,而该算法的应用对PID控制系统的优化效果有限,且模糊控制器固定的量化因子和比例因子依旧会导致系统出现不稳定现象。可将模糊算法、神经网络算法和PID控制结合使用[3],利用了神经网络可逼近任意函数的优点。但BP神经网络在实用中存在收敛速度慢,易出现部分神经元“坏死”等问题。文献[4-5]对该类型算法进行了一定的改进,如在线自动调整学习速率或采用自适应动量因子协调法,提高收敛速率,而实际上动量因子和学习速率对系统的响应敏感性非常有限。同样也可采用其他智能算法进行优化,如用遗传算法优化模糊控制器中的比例和微分参数实现BLDCM速度环的控制[6]。但遗传算法等只宜通过线下优化,自适应能力不足的缺点无法得到改善。
综合考虑PID控制因固定的参数难以兼顾动静态精度,且抗扰动能力不足;自适应模糊神经网络控制源样本采集困难,起动收敛速度慢;模糊控制的响应速率和稳态精度尚有待改进[7]。因此,本文以BLDCM的位置伺服控制为目标,对BP神经网络PID控制做出改进,分别在负载转矩和磁通量2种主要扰动作用下对比验证此改进算法在该系统控制中的优越性和适用性。
1 BLDCM工作原理及其数学模型
BLDCM包括电机本体、转子位置传感器单元以及电子换向电路。电机工作的必要条件是转子磁场和定子磁场处于相互垂直状态,从而产生最大的转矩来驱动转子。BLDCM永磁体转子所激发的磁场相对于转子铁心是静止的,则要想驱动转子不断转动必须满足定子电枢的激励磁场不断变化,因此需要根据转子的位置驱动逆变器按照特定的逻辑顺序工作,实现定子电枢电流的不断换相。使定子电枢不断变换的磁场尽量和转子磁场呈垂直状态,最大效率地驱动转子运转。本文选用三相六状态BLDCM作为研究对象。三相全桥式驱动电路如图1所示[8]。

图1 三相全桥式驱动电路
在建立数模型之前需要作如下假设:
(1) 三相绕组分布均匀且对称;
(2) 忽略定子铁心的磁路饱和和定子齿槽造成的脉动效应;
(3) 忽略电枢线圈的涡流和磁滞现象;
(4) 逆变器具有理想的开关性能。
BLDCM微分方程数学模型分为3部分[9]:电枢回路相电压平衡方程、电磁转矩平衡方程、运动方程。
1.1 电枢回路相电压平衡方程
由电路基尔霍夫电压定理可得:
(1)
式中:La、Lb、Lc为电机三相绕组的自感;Lab、Lac、Lba、Lbc、Lca、Lcb为电机三相绕组的互感;Ra、Rb、Rc为电机的三相绕组电阻;ea、eb、ec为三相反电动势,有ea=Ceaω、eb=Cebω、ec=Cecω;Cea、Ceb、Cec为三相反电势系数;ua、ub、uc为电机三相电压;ia、ib、ic为电机三相电流。
通常将电机三相绕组的自感和互感认为是常数,因此电机磁阻不会随着转子位置的变化而变化,即:
(2)
当绕组以星形方式连接时:
(3)
由式(1)、式(2)联合得:
(4)
1.2 电磁转矩平衡方程
根据电机特性可知,BLDCM的电磁转矩为

(5)
当三相导通时,BLDCM的等效功率是三相绕组相反电动势的和。当BLDCM在间隔120°下两相导通时:

(6)
式中:Ω为BLDCM机械角速度;ω为BLDCM电角速度;p为BLDCM极对数,ψ为定子电枢绕组磁链最大值。
1.3 BLDCM运动方程
BLDCM运动方程如下:

(7)
式中:Jm为电机和负载等效折算到电机轴上的转动惯量;fm为电机轴上的总黏性摩擦系数;Mc为作用在电机轴上的总负载转矩。
2 改进模糊BP-PID算法
2.1 PID
PID控制是一种对被控制系统的反馈误差信号作时间上的比例、微分和积分运算,然后通过叠加获得输出信号的经典控制算法。关键是根据系统特征对比例、积分和微分系数(Kp、Ki、Kd)的确定,在实际应用中一般采用试凑法来整定。常规PID控制器结构模型如图2所示。

图2 PID控制器模型
2.2 BP神经网络PID控制
BP神经网络作为一种应用最广泛的神经网络,是根据误差逆向传播算法进行训练的前馈网络,包括前向传播和误差反向修正2个部分,其中反向修正环节通常以网络输出误差的某函数作为指标函数,采用梯度下降法来逼近其最小值[10]。
神经网络PID控制利用神经网络的自学习能力根据不同的输入变量(误差和误差变化率)调节PID控制器的参数,不局限于系统的模型和参数的数量。本文在主控部分依然采用经典的PID 控制,并行建立以系统输入r、输出y和误差e为输入,Kp、Ki、Kd3参数为输出,隐含层神经元个数为5的4-5-3的3层神经网络 (e=r-y),BP-PID控制器的原理如图3所示。
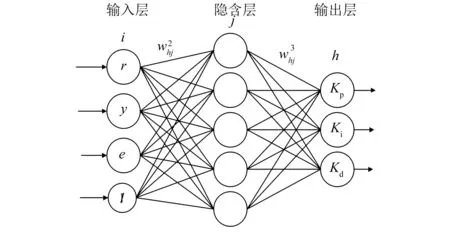
图3 BP神经网络结构图
选用sigmoid函数的变形函数为隐含层激活函数:
(8)
在没有大量样本参数进行训练的情况下,网络仅凭在线自学习功能无法实现快速收敛,而且不同的模型之间也存在一定的差异性。为了加速网络的收敛速度,避免陷入局部极值,本文在前向网络和反向修正的接口位置引入3个修正系数ζp、ζi、ζd,提高网络的初始响应能力。
所以有:
(9)
则被控对象的输入:
u(k)=Kp·[e(k)-e(k-1)]+Ki·e(k)+
Kd·[e(k)-2e(k-1)+e(k-2)]
(10)
评判控制器误差的指标函数选择:

(11)
设置初始权值和阈值为-1~1之间的随机数,并将阈值以单神经元的形式合并在网络权值中;负梯度方向为误差变化最快的方向,故根据梯度下降法调整各层的权值。
2.3 模糊控制调节
2.4 总算法流程
总算法流程包括以下5个部分:
(1) 确定控制器基本结构,包括BP神经网络的输入和输出、网络层数和神经元个数等。
(2) 利用常规方法整定PID 控制器参数。并初始化各层权值、学习速率、惯性系数以及修正系数,各层权值采用-1~1之间的随机数。
(3) 归一化处理输入值,包括控制器输入r、系统输出y和误差e。
(4) 择定前向网络各层的激活函数,并建立模糊调节器,输出层所得各神经元的输出值分别乘以修正系数,然后进行逆向权值自动调节,最终获得补偿控制器的输出值u′(t)。
(5) 设定控制器的性能指标和最多学习次数,当这2项中的任何一项达标,终止学习。
总算法流程图如图4所示。
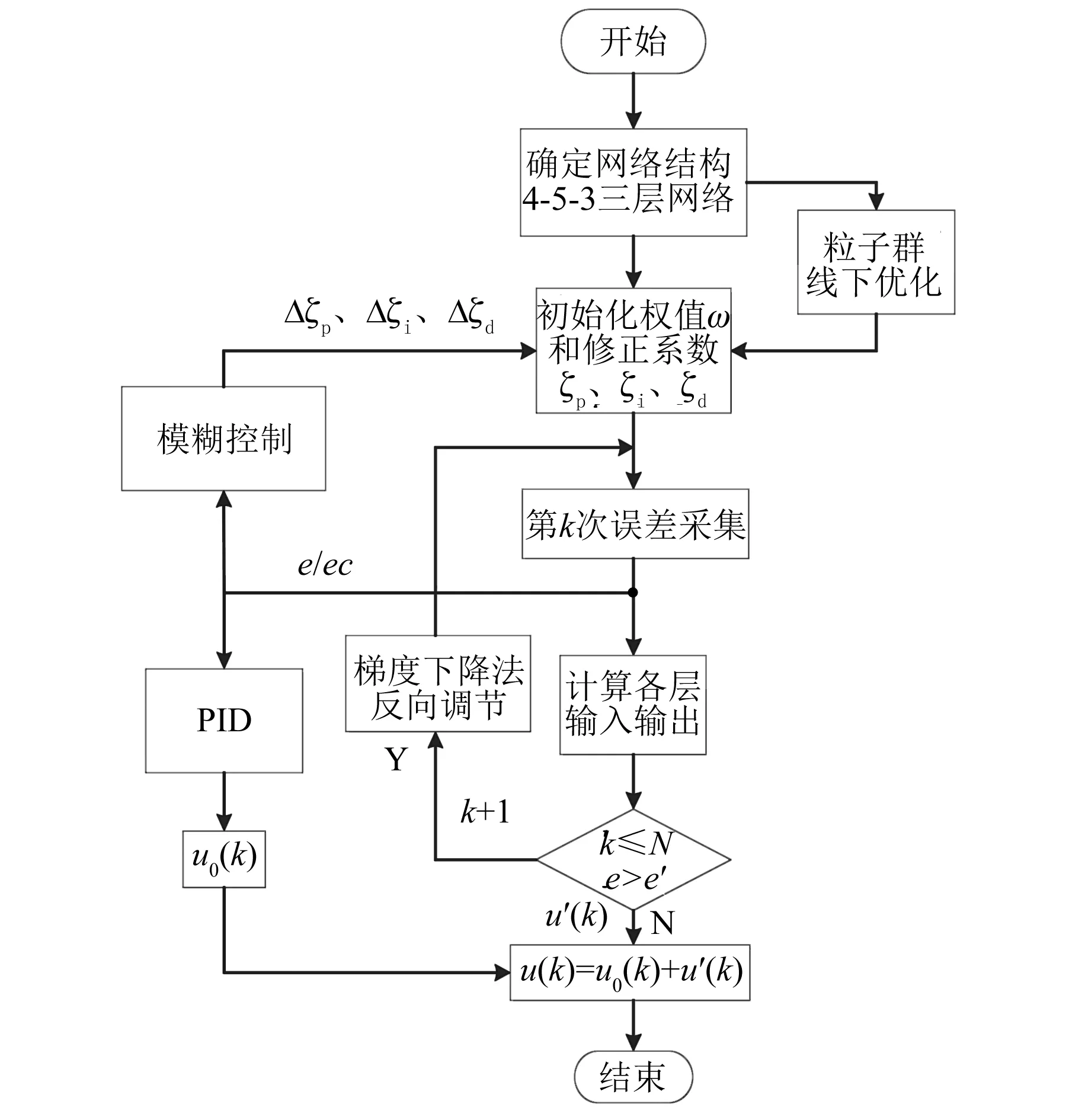
图4 算法流程框图
3 BLDCM三闭环控制系统
BLDCM的控制方案包括开环控制和闭环控制,开环控制无法很好地保证控制精度及其稳定性,因此在实际应用中一般选择闭环控制。其闭环控制又分为多种控制形式,速度、电流双闭环控制策略调节范围宽且稳定性好,应用较为广泛。其中速度环作为外环用以提高BLDCM的速度稳定性,电流环作为内环用来保证电流的稳定性,防止电流过大而损坏电机和电机控制系统。选用位置、速度、电流三闭环控制,除了包含双闭环控制的优点之外,还可以提高电机输出轴的位置信号跟踪能力。BLDCM三闭环控制的结构示意图如图5所示。

图5 BLDCM三闭环控制系统框图
4 仿真及分析
4.1 建立Simulink仿真模型
BLDCM的控制驱动方法包括传统基于六步换相的方波驱动和FOC算法(矢量控制)驱动法,方波驱动的缺点是在换相过程中会产生转矩的振荡现象,模仿分激直流电机的原理,矢量控制指将定子电枢上的转矩电流分量和磁通电流分量进行解耦,进行独立控制。基于以上控制方案,将改进的模糊系数修正BP神经网络PID控制算法应用于该三环控制系统当中,并采用Simulink工具创建其仿真模型[12],总系统仿真模型如图6所示。

图6 BLDCM系统仿真模型
其中速度环和2个电流环采用常规PI控制,由于采样频率较高,波形频繁突变,忽略微分控制,而处于最外环的位置控制器采用智能控制算法。
4.2 仿真结果分析
基于以上系统模型的构建,设置直流电源电压为24 V,极对数为4,定子电枢绕组的相电阻为1.6 Ω,电子点数绕组相电感为8.35×10-4H,空载转动惯量为4.5×10-6kg·m2,额定转速为3 000 r/min,仿真时间为0.2 s。
4.2.1 负载干扰
系统在带负载的情况下起动,设定初始负载为0.2 N·m,在0.08 s处将负载增加至0.4 N·m。在0 s时刻输入1 rad的角位移阶跃信号,当运行至0.13 s,增加角位移至1.5 rad。仿真结果如图7、图8所示。

图7 输出电流变化曲线

图8 输出转矩变化曲线
从以上相电流和转矩的变化可以看出,在电机起动阶段,三相电流会突然增大,随后恢复至稳定状态。当负载转矩发生变化或者产生新的角位移信号时,三相电流的相对值会发生一定变化,但总体大小依旧稳定在额定值范围之内。转矩大小在每次角位移信号发生变化时均会产生突变。相电流及转矩变化的波形均符合理论分析。
图9和图10为BLDCM位置环在分别采用常规PID控制、模糊PID控制和基于模糊系数修正BP神经网络PID控制下的输出角位移和角速度变化曲线。
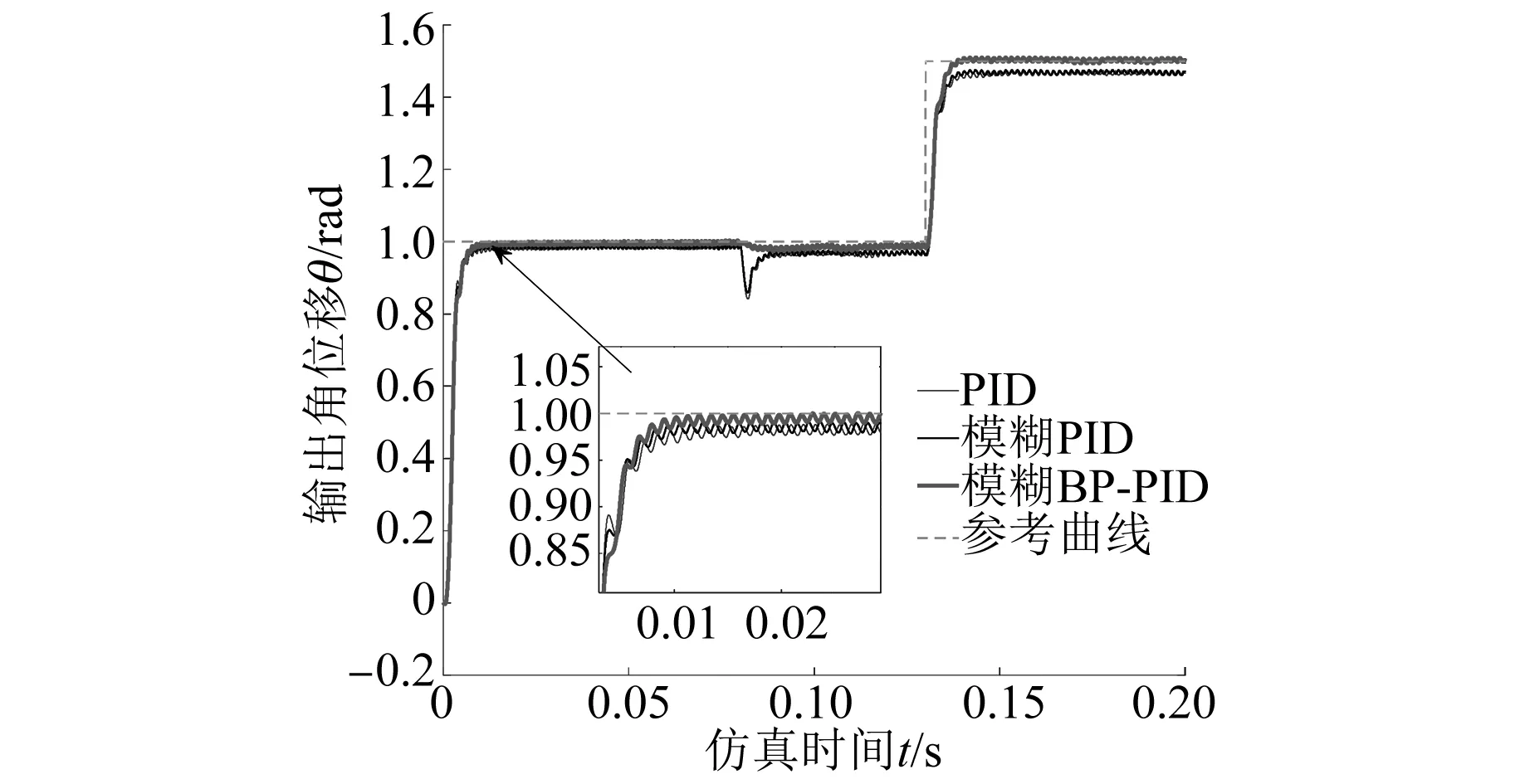
图9 负载干扰下的输出角位移变化曲线

图10 负载干扰下的输出角速度变化曲线
从图9、图10可以看出,当采用常规PID控制和模糊PID控制时,增大负载会导致稳态误差变大,且该误差在后续不能自动缩减,理论上讲可以通过调节积分系数提高稳态精度,但在实际控制中一方面增大积分系数会同时导致超调量的增加,另一方面固定的PID参数无法适应不稳定的负载干扰作用。而模糊系数修正BP神经网络PID控制算法在干扰负载的作用下既具有较快的响应速度也保证了输出信号的稳态精度。从速速响应过程可以发现在此算法之下,起动阶段速度的突变量有所减小,同时在干扰负载的作用下一定程度地避免了速度的较大波动,这对提高电机的转速稳定性具有较大意义。
4.2.2 励磁电流干扰
将BLDCM在工作过程中所经受的电磁干扰表征为定子电枢上励磁电流值的波动,而本文采用的空间矢量算法可将该因素分离出来加以控制,同时便于区别验证系统控制策略的特性。假设系统仍然携带0.2 N·m的负载起动,在0.1 s时刻增加励磁电流值5 A,比较3种控制策略下的位置阶跃响应和角速度变化,如图11、图12所示。
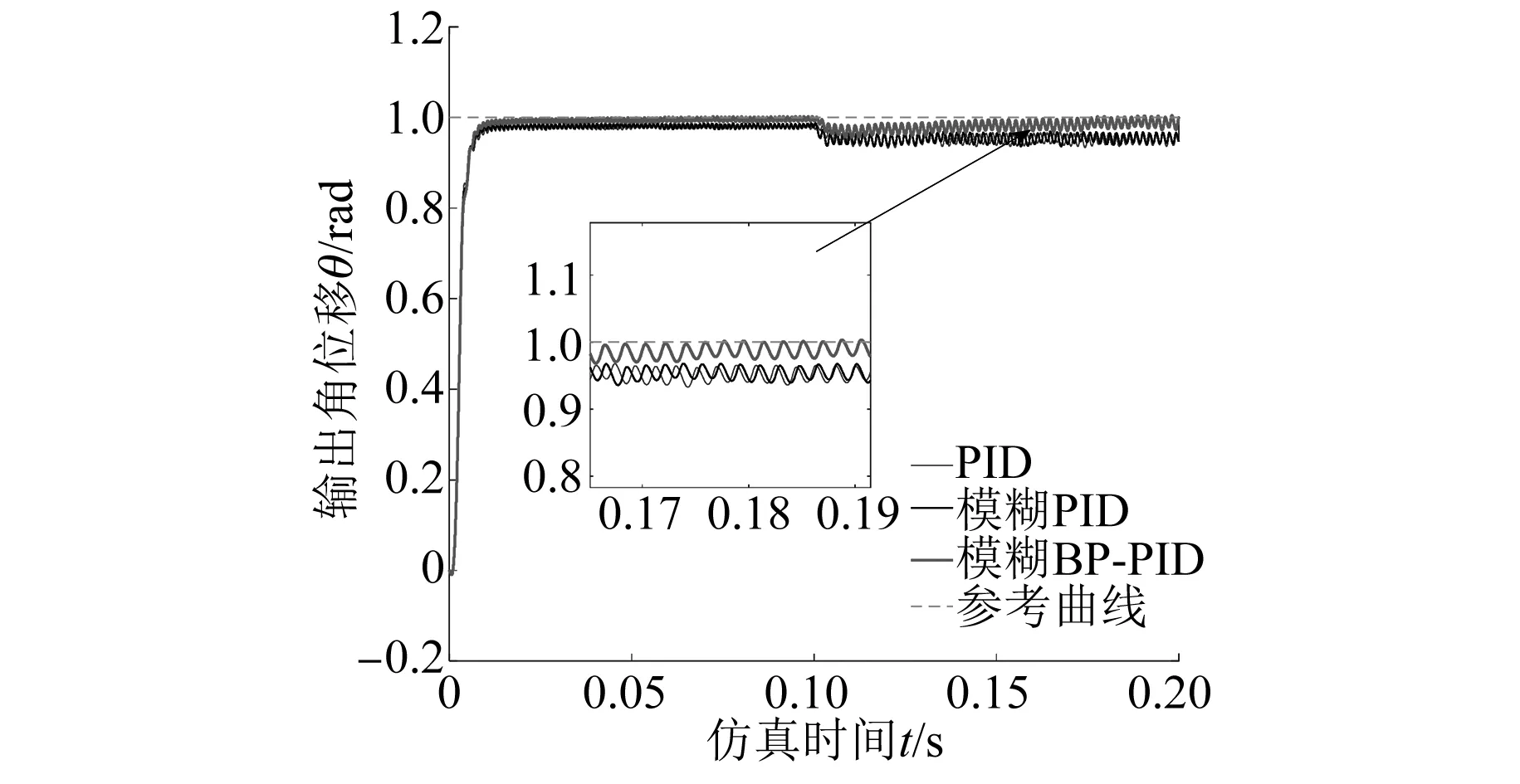
图11 励磁干扰下的输出角位移变化曲线

图12 励磁干扰下的输出角速度变化曲线
由图11可以看出,基于模糊系数修正BP神经网络PID控制下的静态误差几乎为零,在经受干扰信号作用后的短暂时间内依然能够恢复到稳定状态。可见其对励磁电流突变所引起的不稳定性因素同样具备较强的调节能力。而速度变化基本保持稳定,在这一过程中三相电流和输出转矩的变化也依旧符合上述特点,仿真结果略去。
5 结 语
本文以滑行灯伺服转向系统为研究背景,首先介绍了BLDCM的工作原理并基于动力学和电力学平衡方程建立其数学模型,然后分别阐述了PID控制、模糊控制、BP神经网络的理论基础和各自存在的优缺点,从而提出了一种模糊系数修正BP神经网络PID控制策略,并将其应用在BLDCM三闭环控制系统当中,最后通过Simulink建立系统模型,仿真对比3种控制策略在改变负载干扰和励磁电流干扰的情况下的响应特性,仿真分析得到所设计的基于模糊系数修正BP神经网络PID控制在三闭环BLDCM的控制应用中具有鲁棒性强、响应速度快和抗干扰能力强等优点,进一步体现了其在非线性系统中的可行性和优越性。
本文仅将此改进智能控制算法应用在了位置环的控制器上,而未在速度环和电流环作出尝试;没有将矢量控制驱动算法和智能控制算法进行有机的结合。
