考虑输入饱和的锚泊辅助动力定位滑模控制
2021-07-13王元慧李子宜张潇月张晓云
王元慧,李子宜,张潇月,张晓云
(1.哈尔滨工程大学 智能科学与工程学院, 黑龙江 哈尔滨 150001;2.哈尔滨船舶锅炉涡轮机研究所, 黑龙江 哈尔滨 150078)
浮式生产储油卸油船(floating production storage and offloading, FPSO)集开采、生产、储存、运输为一体[1],具有经济灵活、开采风险低;建造周期短,质量高;建造成本不受环境影响;生产模块调换灵活;适应范围广等优点[2],已成为当前主流的海洋油气开发平台。内转塔式系泊FPSO适用于较恶劣的海况和深水海域[3],可采用传统抛锚和现代动力定位相结合的锚泊辅助动力定位系统,有效地减少动力定位推进器的能耗,有望实现全天候、绿色、安全、高效的定位[4],因此本文以内转塔式系泊FPSO为研究对象。
FPSO锚泊辅助动力定位系统凭借其在海洋工程领域广阔的应用前景得到了国内外学者的关注[5-6]。夏国清等[7]针对锚泊辅助动力定位系统,使用隐式广义预测控制算法提高了混合定位系统的定位精度。Nguyen等[8]提出了一种用于锚泊辅助动力定位系统的设定点追踪算法,它是通过使系泊张力与变化的外界环境平衡,自动计算位置设定点,从而使船舶在该点工作时,系泊系统被充分调用,最大限度地减小使用推进系统。并在此基础上设计了可以应对不同海况的锚泊辅助动力定位控制器。Fang等[9]在设定点追踪算法的基础上进行了改进,能够确保每一根缆绳的系泊张力都在安全界限内。Berntsen等[10]将表征缆线安全的可靠性因子引入动力定位控制器设计,设计的反步控制器不仅可以避免锚链断裂威胁FPSO安全,还减少了推进器的消耗。Tuo等[11-12]提出了基于可靠性的控制约束函数,在此基础上设计了含有约束函数的动态面鲁棒控制器,并进一步设计了在线构造模糊估计器处理外界未知环境干扰、参数不确定性和系统未建模动态,对不确定系统具有良好的控制效果。Tannuri等[13]设计了FPSO的滑模动力定位控制器,并通过设置边界层减小系统抖振,验证了其有效性,且对于系统建模误差及外界环境变化具有鲁棒性。但上述文献中没有考虑执行器的饱和问题。
在实际的控制问题中,执行器可能存在饱和限制使得控制器不能达到理想的控制效果,因此在设计控制器过程中往往需要解决执行器的饱和问题。刘晓岑等[14]针对超高声速的飞行器,对舵偏强制限幅并通过双曲正切函数平滑了输入饱和尖峰,减小幅值。Zhao等[15]针对航天器交会的输入饱和问题,提出了输出反馈反步控制律并引入辅助系统分析输入饱和情况,保证了跟踪误差的一致有界性。Xu等[16]引入带有参数调整机制的双曲正切函数构造饱和逼近器,提出了一种无人机的神经网络反步控制器抗饱和方法。司文杰等[17]针对一种在输入饱和情况下,切换单输入单输出系统的跟踪控制问题,采用高斯误差函数描述该饱和模型并利用径向神经网络设计了控制器,跟踪误差收敛到零附近。Lin等[18]对考虑速度不可测、未知环境干扰以及输入饱和的船舶动力定位系统,提出了一种带有辅助动态系统的非线性模糊输出反馈控制器,并通过仿真验证所提出的控制器能够处理上述所有问题并保证了控制精度。由上述文献可以看出,使用双曲正切函数逼近饱和情况和构造饱和补偿辅助系统是目前处理输入饱和情况的2种常用方法。
滑模控制算法作为一种鲁棒性良好的非线性控制方法,被广泛地应用于抗饱和控制器的设计过程中。张超凡等[19]提出了一种固定翼无人机的自适应滑模输入饱和飞行控制策略,使无人机实现姿态和速度的精确跟踪。杨青运[20]等针对飞行器的输入饱和等问题,设计了二阶滑模干扰观测器,并构造了辅助分析系统设计了基于反步法的跟踪控制器。Samia[21]等针对柴油机气道的执行器饱和问题设计了带有辅助系统的自适应控制器,调节了排气管的压力。对于船舶的输入饱和问题,目前国内外也有学者相应地提出了滑模控制策略。付明玉等[22]针对欠驱动水面船在航速和艏向跟踪2方面设计了带有饱和辅助系统的滑模控制律,并且减小了滑模控制器的抖振。Xia等[23]提出了一种基于径向基函数神经网络补偿输入饱和的全驱动船滑模控制器。Li等[24]引入3个附加项到抗饱和动态面控制器的设计中,实现了水下机器人的编队控制。Liang等[25]提出了一种将处理饱和的辅助系统信号引入滑模控制器设计中的自适应输出反馈系统,实现了船舶的动力定位控制。然而多数文献没有涉及将滑模控制算法应用于解决FPSO锚泊辅助动力定位控制器的输入饱和问题中。
鉴于以上问题,本文以恶劣海况下作业的FPSO为研究对象,通过引入表征缆线安全的结构可靠性因子,设计了锚泊辅助动力定位滑模控制器,并考虑执行器输入饱和的情况,分别使用双曲正切函数逼近输入饱和情况和设计饱和补偿辅助系统2种方法,对输入饱和进行了平滑与补偿。
1 FPSO数学模型的建立
如图1所示,在北东坐标系之中,xn指向北,yn指向东。船体坐标系中xb指向船艏,yb指向船体右舷,zb则在纵剖面内指向船底。
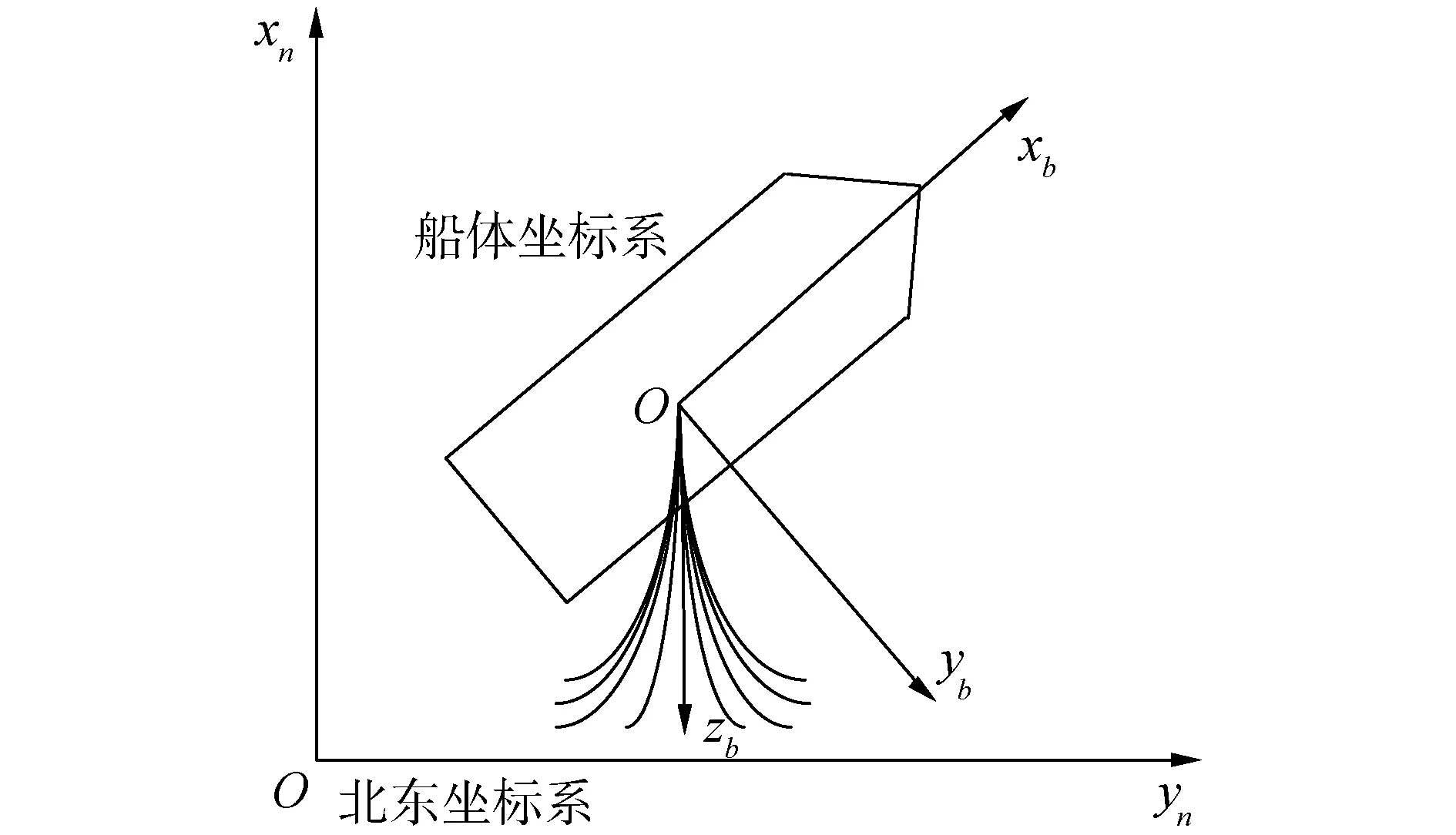
图1 FPSO坐标系
仅考虑船舶纵荡、横荡和艏摇这3个水平面上的运动,建立北东与船体坐标系变量之间的转换关系,即船舶的三自由度运动学模型[26]:
(1)
式中:η=[xyψ]T代表北东坐标系下FPSO的位置和姿态向量;υ=[uvr]T代表船体坐标系下FPSO运动速度和角速度向量;R(ψ)为转换矩阵,具体表示为:
(2)
由于研究对象是水平面低速动力定位情况下的FPSO,因此建立运动数学模型:
(3)
式中:M是系统惯性矩阵,且M=MT=MRB+MA;D是系统的阻尼矩阵;τ表示FPSO推进器提供的力和力矩;τm表示FPSO锚泊辅助系统提供的作用力;τenv表示海洋环境干扰力和力矩。
在实际情况中,动力定位系统的推进器不可能提供无限大的力和力矩,推进器在3个自由度下提供的推力与推力矩应该满足如下的饱和限制:
(4)
式中:i=1,2,3分别代表FPSO在纵向、横向和艏向3个自由度;τimin、τimax分别代表推进器系统在第i个自由度上的最小、最大推力限制;τci代表第i个自由度上在不考虑饱和情况下动力定位控制器控制律。
从式(4)可以看出,当动力定位控制器的力在饱和限制的最大值与最小值区间内,不需要考虑输入饱和情况;当控制力超过饱和限制时,由于饱和非线性函数的限制,会导致推进器提供的力不能达到预期的计算,降低控制系统性能,不能达到预期的定位要求。动力定位控制器输入饱和的情况无疑加大了控制系统的设计难度,但更符合实际的情况。
本文的目标是在考虑到FPSO推进器存在推进力输出限制的实际情况下,同时考虑锚泊系统的安全,引入结构可靠性因子,分别采用双曲正切函数逼近输入饱和与输入饱和辅助系统2种方法,设计基于结构可靠性的抗饱和动力定位滑模控制器。
2 控制器设计及稳定性分析
2.1 设计基于结构可靠性的滑模动力定位控制器
引入参考文献[11]中的结构可靠性因子矩阵进行锚泊辅助动力定位滑模控制器的设计:
(5)
式中:Tj代表第j根缆线的时变张力;(xj,yj)是第j根缆线在海床的连接点位置;σb,j是第j根缆线的最大断裂张力的标准偏差;Xj为缆线在水平方向的投影,具体表示为:
(6)
设计基于结构可靠性动力定位控制器,控制FPSO从实际的[δjψ]T到达期望的[δdψd]T,定义滑模面s1:
e1=[δj-δdψ-ψd]T
(7)
(8)

对误差求取一阶导数,得到:
(9)
对滑模面s1求一阶导数:
(10)
(11)
代入式(3),得到滑模控制器的等效控制量:
(12)
将滑模控制器的输入量定义为:
τ=τeq+τsw
(13)
式中τsw表示滑模控制的开关部分,为了保证滑模面s1能够在有限时间内趋近于0,选取指数趋近率为:
τsw=-MQ-1(k1sgn(s1)+ε1s1)
(14)
式中:k1、ε1分别表示切换增益和指数趋近项系数,由此获得控制量为:
τ=Dυ-τenv-τm-MQ-1(k1sgn(s1)+
(15)
通过Lyapunov定理证明以上设计的滑模控制系统的稳定性,构造Lyapunov函数为:
(16)
对V1求导并将式(10)代入整理得:
(17)
将控制器推力τ代入式(17)推得:
(18)
上式恒成立,系统稳定。为减小抖振,采用饱和函数代替符号函数:
(19)
获得滑模控制器的控制量:
τ=Dυ-τenv-τm-MQ-1(k1sat(s1/δ)+
(20)
式中δ是边界层厚度。
2.2 使用双曲正切函数逼近输入饱和情况
双曲正切函数由最基本的双曲正弦函数和双曲余弦函数导出,数值上等于二者的比值,具有的形式:
(21)
考虑FPSO推进系统的输入饱和特性,拟采用双曲正切函数来对实际的推力和力矩τ进行平滑和有界性的处理:
(22)
式中τci取式(20)中设计的基于结构可靠性的滑模控制律。
基于双曲正切函数的输入饱和控制器,仅仅利用了双曲正切函数的平滑有界性,对控制力和力矩进行了平滑处理,并没有进一步就输入饱和部分对控制系统产生的影响进行实质补偿,因此,接下来设计了输入饱和辅助系统来解决上述问题。
2.3 设计输入饱和辅助系统与稳定性分析
设计带有饱和补偿辅助系统的抗饱和控制器。在控制器设计过程中引入结构可靠性因子来表征缆线安全并对FPSO的运动进行间接控制,因此提出针对结构可靠性导数矩阵Q的输入饱和辅助系统:
(23)
式中:ξ1=[ξ11ξ12]T和ξ2=[ξ21ξ22ξ23]T为饱和补偿辅助系统的状态向量;τ为FPSO推进器所能提供的实际推力和力矩;τc代表理想状态下的控制器的推力和力矩,见式(20);Δτ=τ-τc为饱和补偿辅助系统提供的纵向、横向推力和转艏力矩的补偿;Q∈R2×3为引入的结构可靠性导数矩阵;C1∈R2×2,C2∈R3×3和C3∈R3×3均为正定对称矩阵。
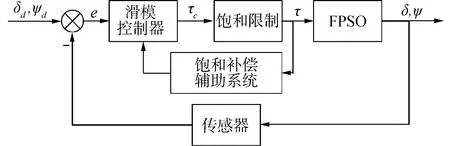
图2 饱和辅助系统结构
在设计的控制器中加入饱和补偿辅助系统:
e2=[δjψ]T-[δdψd]T-ξ1
(24)
然后,定义滑模控制器的滑模面:
(25)
对误差进行一次求导,有:
(26)
对滑模面s2求取一阶导数为:
(27)
将运动数学模型代入式(27)得:
(28)
(29)
将滑模控制的输入量定义为:
τ=τeq+τsw
(30)
式中τsw是滑模控制的开关部分,为了保证滑模面s2能够在有限的时间内趋近与0,选取趋近率为:
τsw=-MQ-1(k2sgn(s2)+ε2s2)
(31)
式中k2、ε2分别表示切换增益和指数趋近项系数,由此获得控制量为:
(32)
通过Lyapunov定理证明带有输入饱和辅助系统的滑模控制器稳定性,定义Lyapunov函数为:
(33)
对V2求导得:
(34)
其中有:
(35)
(36)
此时有:
(37)


(38)
其中,饱和补偿辅助系统的参数C1、C2、C3,在控制器的设计过程中应该满足:
(39)
(40)

(41)
(42)
同样,使用饱和函数以减少滑模控制器抖振,获得带有输入饱和补偿系统的滑模控制律:
τ=Dυ-τenv-τm-MQ-1(k2sat(s2/δ)+ε2s2+
(43)
3 数值仿真与分析
使用文献[27]中的FPSO模型参数,海洋环境选取恶劣海况,具体参数见表1。设定FPSO期望的艏向为10°,初始位置为(0,0),临界结构可靠性因子为4.4,期望结构可靠性因子为5,缆线平均断裂张力3 500 kN。设置推进器限制:纵向推力限制:3×104kN;横向推力限制:1×105kN;艏摇力矩限制:4×107kN·m。仿真时间2 000 s。滑模控制器参数c1、c2取diag(1.2,1.2),趋近律参数分别取diag(0.1,0.001)和diag(0.4,0.05),饱和补偿辅助系统的相关参数分别为C1=diag(10,10),C2=diag(10,10,10),C3=diag(10-8,10-8,10-12),边界层厚度取0.5。
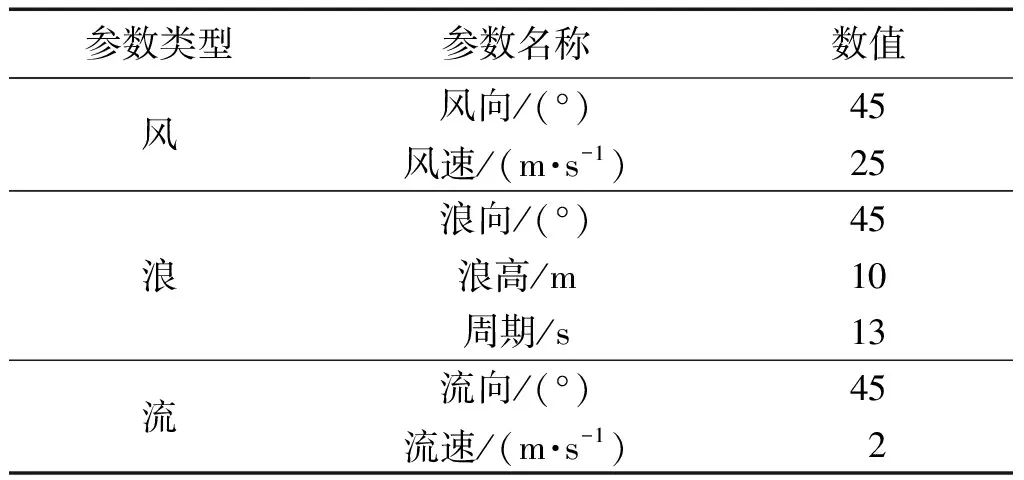
表1 海洋环境参数
由于系统误差在短时间内收敛,因此截取前200 s时间内的仿真结果,如图3~8所示。
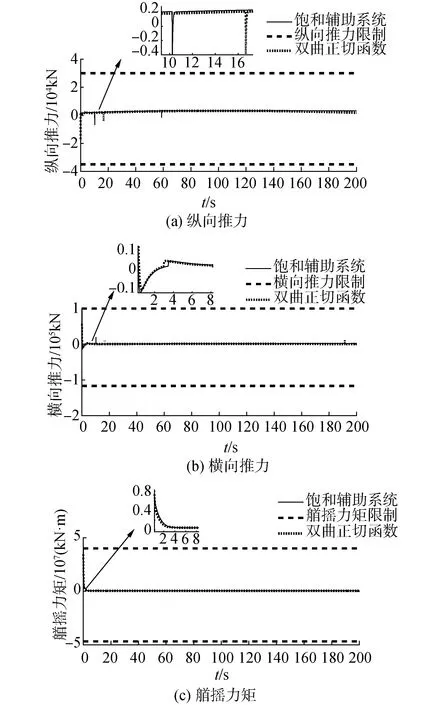
图3 控制力输出变化曲线
由图3可以看出,通过双曲正切函数逼近饱和与设计饱和补偿辅助系统2种方法都可以有效地处理输入饱和情况,纵向、横向和转艏力矩都没有超过限制。2种方法的输出力与力矩大致相同,都是在仿真开始的极短时间内输出较大的力矩后迅速稳定在零附近。由于采用的是锚泊辅助动力定位方法,控制器会在某些时刻提供纵向推力以保证锚泊系统的安全,从而减少推进器的消耗。
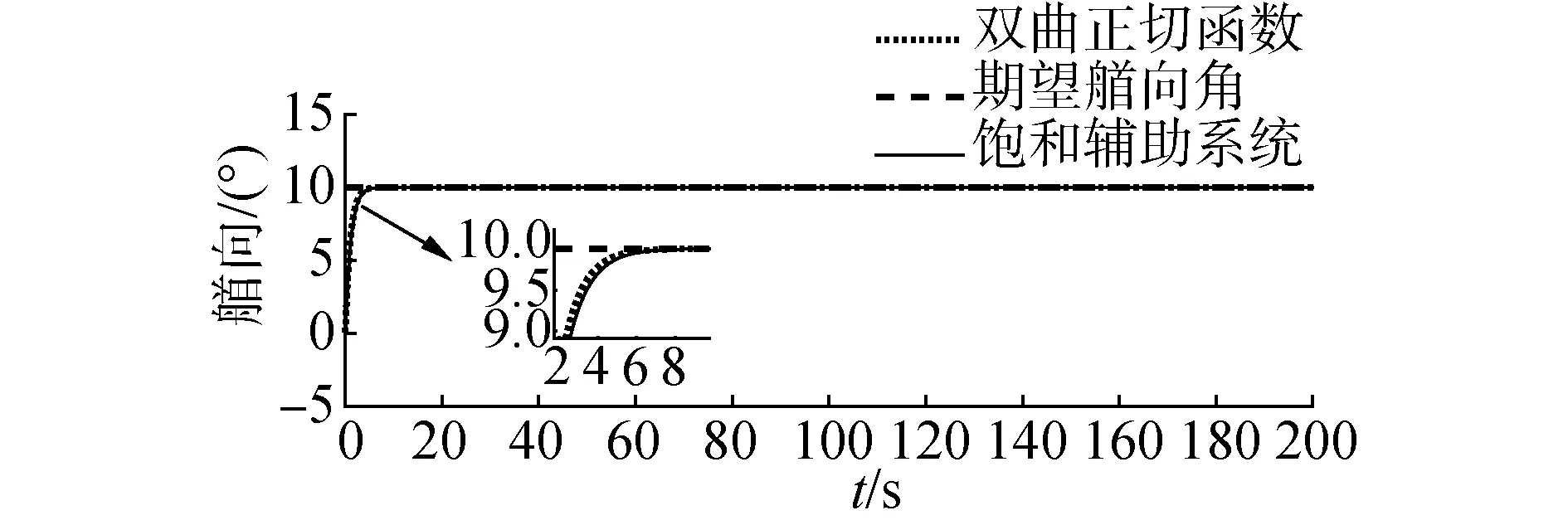
图7 艏向角变化曲线
从图4可知,设计的饱和补偿辅助系统主要作用在仿真开始时刻,为超出推力限制的部分提供补偿,之后不再起作用。
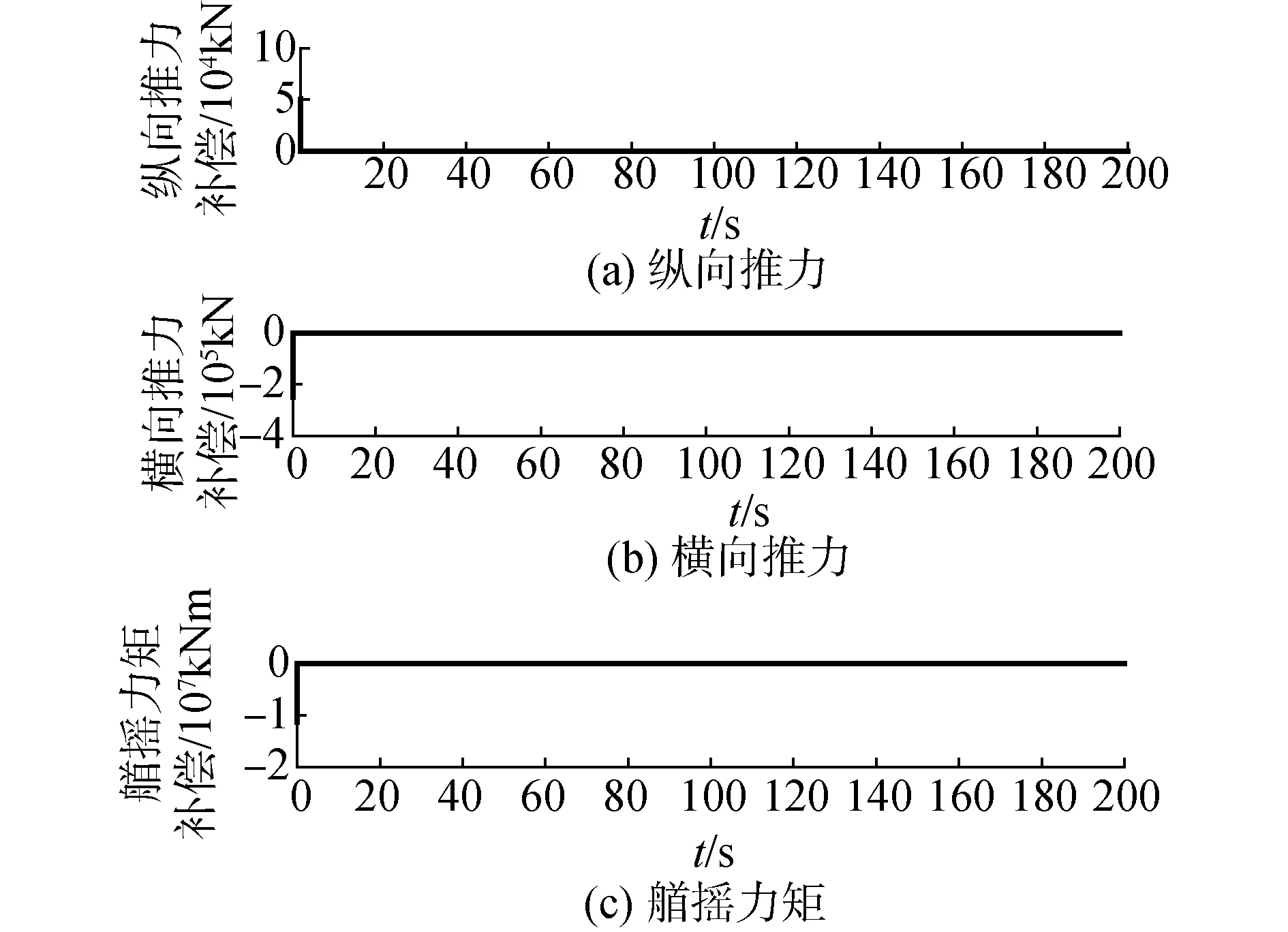
图4 饱和补偿辅助系统力矩补偿曲线
图5中的实线和虚线分别是采用饱和辅助系统和双曲正切函数逼近饱和2种策略的船舶运动轨迹,由于本文的控制目标是结构可靠性因子和艏向,结合图6、7,可以看出2种情况都可以实现FPSO恶劣海况下的动力定位,只是船舶的运动轨迹不同。
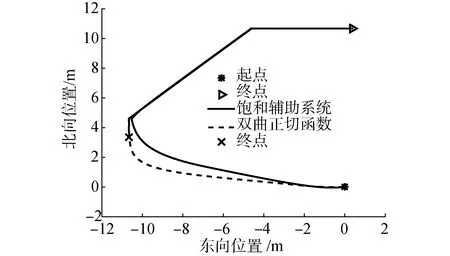
图5 FPSO运动轨迹
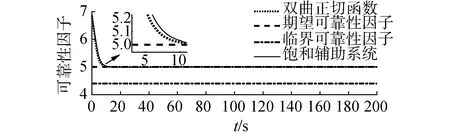
图6 结构可靠性因子变化曲线
由图6~8可知,2种抗饱和滑模控制器都能使FPSO到达期望的艏向角,同时结构可靠性因子能在控制器作用下维持在期望值,且大于临界值,8根缆线受力都没有超过平均断裂张力,保证了锚泊系统的安全。此外,由图8和图10可知,饱和辅助系统相比于双曲正切函数逼近饱和,FPSO所移动的距离要小,且缆线受力小,这说明饱和辅助系统对超出限额的部分进行了补偿,进一步抵消恶劣环境对船舶的影响,而双曲正切函数逼近饱和的方法没有进一步补偿控制力的超额部分,因此,输入饱和辅助系统使系泊系统可以更加安全可靠。
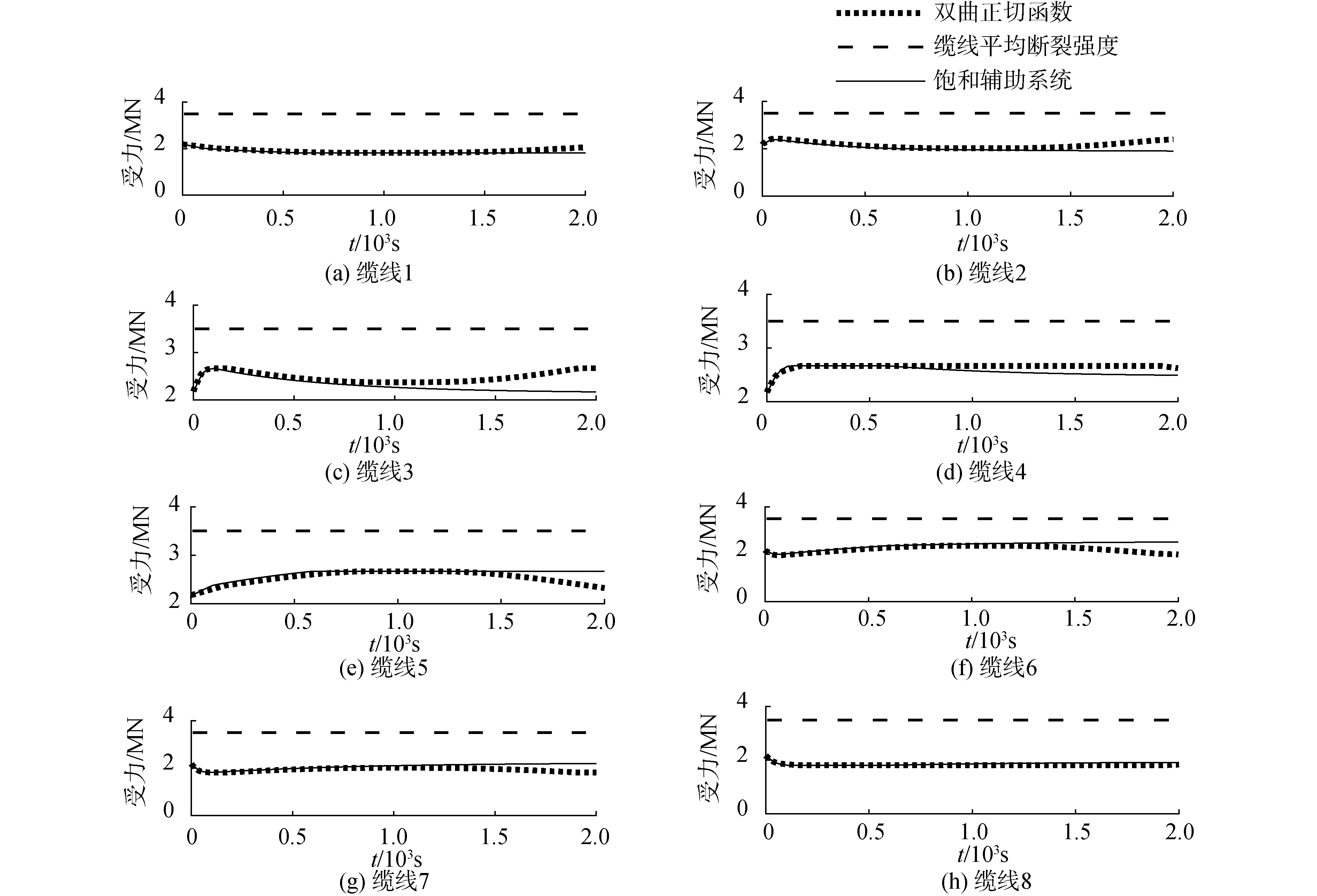
图8 缆线受力变化曲线
4 结论
1)本文利用结构可靠性因子设计可靠性矩阵间接控制FPSO运动,保证了锚泊系统的安全。
2)本文设计的基于结构可靠性的锚泊辅助动力定位控制器实现了FPSO恶劣海况下的定位控制。
3)本文使用2种抗饱和方法都能有效地处理推进器的输入饱和,并实现定位控制,保证系统安全。
由于FPSO作业于深海环境,其系统的内部存在不确定项和未知的时变干扰,应该在今后的研究中予以讨论。
